
Hierarchical Energy-transfer Features
Radovan Fusek, Eduard Sojka, Karel Mozd
ˇ
re
ˇ
n and Milan
ˇ
Surkala
Technical University of Ostrava, FEECS, Department of Computer Science
17. listopadu 15, 708 33 Ostrava-Poruba, Czech Republic
Keywords:
Object Detection, Recognition, SVM, Image Descriptors, Feature Selection.
Abstract:
In the paper, we propose the novel and efficient object descriptors that are designed to describe the appearance
of the objects. The descriptors are called as Hierarchical Energy-Transfer Features (HETF). The main idea
behind HETF is that the shape of the objects can be described by the function of energy distribution. In the
image, the transfer of energy is solved by making use of physical laws. The function of the energy distribution
is obtained by sampling, after the energy transfer process; the image is divided into the cells of variable sizes
and the values of the function is investigated inside each cell. The proposed descriptors achieved very good
detection results compared with the state-of-the-art methods (e.g. Haar, HOG, LBP features). We show the
robustness of the descriptors for solving the face detection problem.
1 INTRODUCTION
The area of computer vision includes many tasks that
have been well researched in recent years. In this pa-
per, we will focus on the problem of object descrip-
tion and detection. It is clear that the images con-
tain many objects of interest. The goal of the ob-
ject detection systems is to find the location of these
objects in the images (e.g. cars, faces, pedestrians).
For example, the vehicle detection systems are cru-
cial for traffic analysis or intelligent scheduling, the
people detection systems can be useful for automo-
tive safety, and the face detection systems are the key
part of face recognition systems. Typically, the detec-
tion algorithms are composed from two main parts in
the area of feature-based detectors. The extraction of
image features is the first part. The second part is cre-
ated by the trainable classifiers that handle the final
classification (object/non-object). In this paper, our
contribution will be focused on the first part; on the
extraction of image features.
The proposed features are based on the idea that
the appearance of objects can be described by the
function of the distribution of energy; if we speak
about the energy transfer in this paper, we have the
transfer of heat in mind. We suppose that the im-
age is a rectangular plate with the thermal conduc-
tivity properties; big gradients represent the low con-
ductivity and vice versa. In the process of obtain-
ing the proposed features, the temperature sources
are placed into the image. The transfer of tempera-
ture starts from the sources at the same time and the
transfer is carried out during a chosen time. The dis-
tribution of temperature is investigated after the tem-
perature transfer. The vector of features that is com-
posed of this distribution is then used as an input for
the SVM classifier. In essence, the proposed features
are slightly inspired by HOG but instead of the his-
tograms of oriented gradients we investigate the dis-
tributions of temperature. In this paper, we show the
properties of the proposed features for solving the
problem of face detection and we show that using the
function of temperature distribution, the faces can be
described with a reasonable number of features with
good detection results. The preliminary version of the
presented method (without the hierarchical improve-
ment) was used for face detection in (Fusek et al.,
2013).
The paper is organized as follows. In Section 2,
we present an overview of the state-of-the-art feature-
based detectors. In Section 3, we describe the extrac-
tion of the proposed features in detail, and we show
the experiments and results in Section 4.
2 RELATED WORKS
In this section, we will especially focus on the im-
age features that are extracted over the sliding win-
dow that are divided into the dense areas (due to the
fact that the proposed descriptors are also calculated
695
Fusek R., Sojka E., Mozd
ˇ
re
ˇ
n K. and Šurkala M..
Hierarchical Energy-transfer Features.
DOI: 10.5220/0004829506950702
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 695-702
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

within the dense regular blocks).
In recent years, the object detectors that are based
on the edge analysis providing the valuable informa-
tion about the objects of interest have been used in
many detection tasks. In this area, the Histograms of
Oriented Gradients (HOG) (Dalal and Triggs, 2005)
are considered as the state-of-the-art method. In
essence, the HOG descriptors can be regarded as a
dense version of the SIFT features. In HOG, a sliding
window is used for recognition. The window is di-
vided into small connected cells in the process of ob-
taining HOG descriptors. The histograms of gradients
are calculated for each cell. It is desirable to normal-
ize the histograms across a large block of image. As a
result, a vector of values is computed for each position
of window. This vector is then used for recognition,
e.g. by the Support Vector Machine (SVM) classifier
(Boser et al., 1992). Many methods and applications
that are based on HOG have been successfully pre-
sented in recent years. The PHOG descriptors that use
the pyramid image representation were presented in
(Bosch et al., 2007). The classical HOG-based detec-
tor was used for detecting upper bodies for automated
upper body pose estimation in (Ferrari et al., 2008).
Felzenszwalb et al. (Felzenszwalb et al., 2010) pro-
posed the part-based detector that is based on HOG.
In this method, the objects are represented using mix-
tures of deformable HOG part models and these mod-
els are trained using a discriminative method.
Haar-based descriptors represent the next possi-
bility for object description. The main idea behind
the Haar-like features is that the features can encode
the differences in mean intensities between two rect-
angular areas. For instance, in the problem of face
detection, the regions around the eyes are lighter than
the areas of the eyes; the regions below or on top
the eyes have different intensities that the eyes it-
self. These specific characteristics can be simple en-
coded by one two-rectangular feature, and the value
of this feature can be calculated as the difference be-
tween the sum of the pixels inside the two rectangles.
The Haar-like features which are similar to Haar ba-
sis function have first been proposed by Papageor-
giou and Poggio (Papageorgiou and Poggio, 2000).
In their paper, the Haar-like features are combined
with the SVM classifier. The authors used the three
types of Haar features (vertical, horizontal, diagonal)
that were able to encode the changes in the intensi-
ties at various locations, scales, and orientations. The
authors also reported promising performance in the
tasks of face, car, and people detection in their paper.
Since then, the Haar-like features and their modifica-
tions have been used in many works. The paper of
Viola and Jones (Viola and Jones, 2001) contributed
to the popularity of Haar-like features. They pro-
posed the object detection framework based on the
image representation called the integral image com-
bined with the rectangular features, and AdaBoost al-
gorithm (Freund and Schapire, 1995). The extension
of the Haar feature set has been presented by Lienhart
et al.(Lienhart and Maydt, 2002). In this paper, the
authors presented 45
◦
rotated features that are able to
reduce the false alarm and achieve more accurate face
detection.
Local Binary Patterns (LBP) that were introduced
by Ojala et al.(Ojala et al., 1996) for texture analy-
sis can also be used for object description. The main
idea behind LBP is that the local image structures (so
called micro patterns such as lines, edges, spots, and
flat areas) around each pixel can be efficiently en-
coded by comparing every pixel with its neighboring
pixels; in the basic form, every pixel is compared with
its neighbors in the 3 × 3 region. The result of the
comparison is the 8-bit binary number for each pixel;
in the 8-bit binary number, the value 1 means that the
value of center pixel is greater than the neighbor and
vice versa. The histogram of these binary numbers
is then used to encode the appearance of the region.
The important properties of LBP are resistance to
lighting changes and low computational complexity.
Duo to their properties, LBP have been used in many
recognition tasks, especially for facial image analy-
sis. In (Hadid et al., 2004), LBP were used for solving
the face detection problem in low-resolution images.
Multi-block Local Binary Patterns (MB-LBP) for face
detection were proposed in (Zhang et al., 2007). The
paper of Tan and Triggs (Tan and Triggs, 2010) pro-
posed the face recognition method using robust pre-
processing based on the Difference of Gaussian image
filter combined with LBP in which the binary LBP
code is replaced by the ternary LTP code.
In the next section, we will show the process of
extraction of the proposed features.
3 HIERARCHICAL
ENERGY-TRANSFER
FEATURES
As was mentioned before, the main idea behind the
proposed features is based on the fact that the ap-
pearance of objects can be efficiently described by the
function of temperature distribution in the following
way.
Suppose the theoretical image that contains one
object (with one area), and suppose that this object
has very thin edges; theoretically, the edges can be
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
696
infinitely thin (the gradient of brightness of this theo-
retical image is shown in the second row in Fig. 1).
Suppose that this object of interest (with the very thin
edges) is analyzed by the functions of gradient sizes
and directions. The meaningful sample values of this
function can be difficult to obtain; it is difficult to ob-
tain (by the samples) the information about the thin
edges (it may happen that the samples will not hit the
thin edges). On the other hand, the function of tem-
perature distribution does not make problems during
sampling. Suppose that the source of constant temper-
ature is placed inside the considered object; say that
into the gravity center of object (Fig. 1(a)). Inside the
image, the temperature transfer (from this source) can
be solved by making use of physical laws. It means
that the gradients of the object can be considered as
the thermal insulator; high gradients indicate the low
conductivity and vice versa. After the temperature
transfer that is carried out during a chosen time, the
area of this object will contain a certain distribution
of temperature (Fig. 1(b)), and the function of tem-
perature distribution inside this object can be investi-
gated. In this function, the areas with approximately
constant temperature values are important and it is an
easy matter to hit them by samples.
under the rectangular basin
under the rectangular basin
inside the object
inside the object
temperature
temperature
0
1
0
1
t = 0
t > 0
(a)
(b)
Figure 1: The image with one object and one source of tem-
perature. The value of temperature is depicted by the inten-
sity of red color.
Finally, the temperature distribution reflects the
presence of objects and their parts and the appearance
of object of interest can be described by the distribu-
tion (with a relatively small amount of descriptors),
which is the main idea of the method we propose.
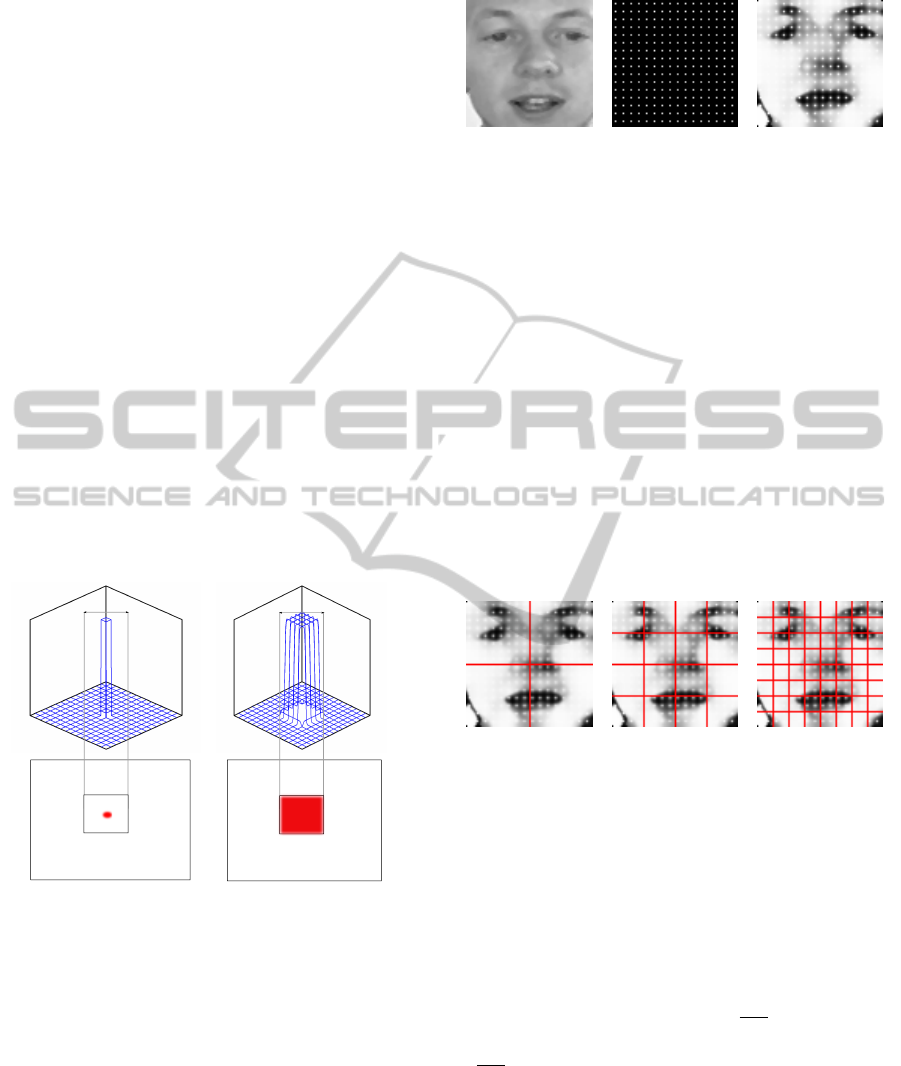
It is clear that the real images consist of objects
with different areas (Fig. 2(a)) and one temperature
source will not be enough to cover all areas. There-
fore, we chose the location of temperature sources in
the form of regular grid (Fig. 2(b)). At the time t = 0,
(a) (b) (c)
Figure 2: The real-life image (a). The regular grid of
sources (b). The visualization of distribution of temperature
from these sources (c). The value of temperature is depicted
by the level of brightness.
the temperature of constant value 1.0 is attached to the
source locations; other places inside the image have
zero temperature at the time t = 0. The temperature
transfer that starts from all sources at the same time is
carried out during a chosen time t. Once the temper-
ature transfer inside the image is obtained, the func-
tion of temperature distribution inside the image is in-
vestigated (the example of temperature distribution is
shown in Fig. 2(c)). For this purpose, the image is
iteratively divided into the finer spatial cells; i.e. we
recursively divide the image into the cells of varying
size (Fig. 3). In general, the image at hierarchical
level l has 4
l
cells. Inside each cell, the distribution is
investigated.
l = 1 l = 2 l = 3
Figure 3: The different hierarchical levels of the cells.
Let I(x, y, t) be the function of temperature (at lo-
cation (x, y) and the time t) that is determined. We
can compute the mean temperature in every cell; Iµ
it
stands for the mean temperature of the i-th cell at the
time t. We use the mean cell temperatures as the val-
ues in the feature vector. For the additional informa-
tion and for the precise description of the temperature
distribution, we use the histogram of the temperature
distribution that is also determined inside the cells.
Each cell is represented by the
p
|M| + Iµ
it
dimen-
sion vector, where |M| is the size of the cell, and
p
|M| represents the number of histogram bins; the
final vector of features is composed of the mean tem-
perature and from the histograms of each cell at each
hierarchical level. For example, for one cell of size
400 pixels (20 × 20), we compute the 20 histogram
bins and the mean temperature of the cell Iµ
it
, and the
feature vector of this cell is the vector with dimension
d = 21. The process of composing the final feature
HierarchicalEnergy-transferFeatures
697
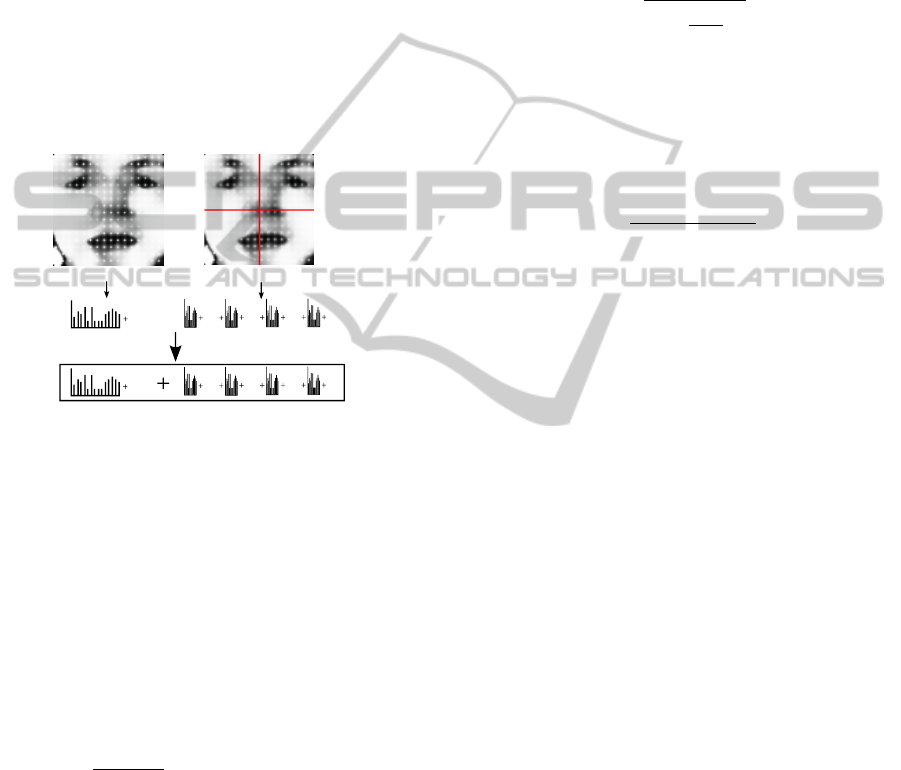
vector for the levels l = 0 and l = 1 is shown in Fig.
4.
In the detection phase, we use the sliding window
technique. The size of detection window is set to the
size of training samples. Once the temperature field
inside the whole input image is computed, the detec-
tion window scans this field and the feature vector
is composed inside the window. The vector is then
used as an input for the SVM classifier. It is impor-
tant to mention that the classical HOG descriptors are
not rotationally invariant. Since the proposed descrip-
tors are similar to the HOG descriptors (in the sense
that the features are computed in a grid in both ap-
proaches), this limitation also occurs in the proposed
descriptors. Similarly as in HOG, the scale invariance
is achieved by rescaling the images.
I
it
μ
I
it
μ
I
it
μ
I
it
μ
I
it
μ
I
it
μ
I
it
μ
I
it
μ
I
it
μ
I
it
μ
Final feature vector
l = 1
l = 0
Figure 4: The process of composing the final feature vector.
In the case that the image has size 80 ×80 pixels, the vector
dimension is d = 81 at the level l = 0 (80 bin histogram +
mean temperature Iµ
it
). The level l = 1 contains 4 cells with
size 40 × 40; the 40 bin histogram with the mean tempera-
ture Iµ
it
is calculated in each cell (41 values for each cell)
and the vector dimension is d = 164. In this case, the final
feature vector is composed as the sum of vector at the level
l = 0 and l = 1.
For the practical realization of the method, it is
important to mention that the thermal field inside the
image can be solved by making use of the following
equation (Perona and Malik, 1990)
∂I(x, y, t)
∂t
= div(c∇I), (1)
where I represents the temperature at a position (x, y)
and at a time t, div is a divergence operator, ∇I is the
temperature gradient and c stands for thermal con-
ductivity. For the source points and arbitrary time
t ∈ [0, ∞), we set I(x
s
, y
s
, t) = 1, where (x
s
, y
s
) are the
coordinates of the source points (i.e. we hold the tem-
perature constant during the whole process of trans-
fer, which is in contrast with the usual diffusion ap-
proaches). In all remaining points, we take into ac-
count the initial condition I(x, y, 0) = 0. We solve the
equation iteratively. The conductivity in Eq. 1 is de-
termined by
c = g(
k
E
k
), (2)
where E is an edge estimate. We define the edge es-
timate E as the gradient of original image E = ∇B,
where B is the brightness function. The function g(·)
has the form of (Perona and Malik, 1990)
g(
k
∇B
k
) =
1
1 +
k
∇B
k
K
2
, (3)
where K is a constant representing the sensitivity to
the edges (Perona and Malik, 1990). Once the tem-
perature field over the input image is obtained (at a
chosen time t), the mean cell temperature Iµ
it
can be
obtained by making use of the formula
Iµ
it
=
RR
M
I(x, y, t)dxdy
|M|
, (4)
where M stands for the cell area, and |M| is its size.
The Support Vector Machine classifier with the radial
basis function kernel is trained over the proposed de-
scriptors in the next step to create the final classifier.
4 EXPERIMENTS
For the training phase, the positive set consists
of 2300 faces and 4300 non-faces. We used the
face images from the BIOID database (https://
www.bioid.com/downloads/software/bioid-face-
database.html) combined with the Extended Yale
Face Database B (Lee et al., 2005). We manually
cropped these images on the area of faces only.
The negative set consists of 3000 images that were
obtained from the MIT-CBCL database (http:/
/cbcl.mit.edu/software-datasets/FaceData2.html)
combined with the 1300 hard negative examples.
The training images (for the proposed method) were
resized to the size of 80×80 pixels. The visualization
of temperature distribution of faces is shown in Fig.
5.
As we said before, we use the sliding window
technique in the detection phase. The size of detec-
tion window is set to 80 × 80 pixels (the size of train-
ing samples). We use the fixed size of window that
scan the image in 12 different resolutions of input
image. The thermal field is computed for each res-
olution. The example of visualization of temperature
function inside the whole input image (of one reso-
lution of input image) with the positive detections is
shown in Fig. 6.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
698
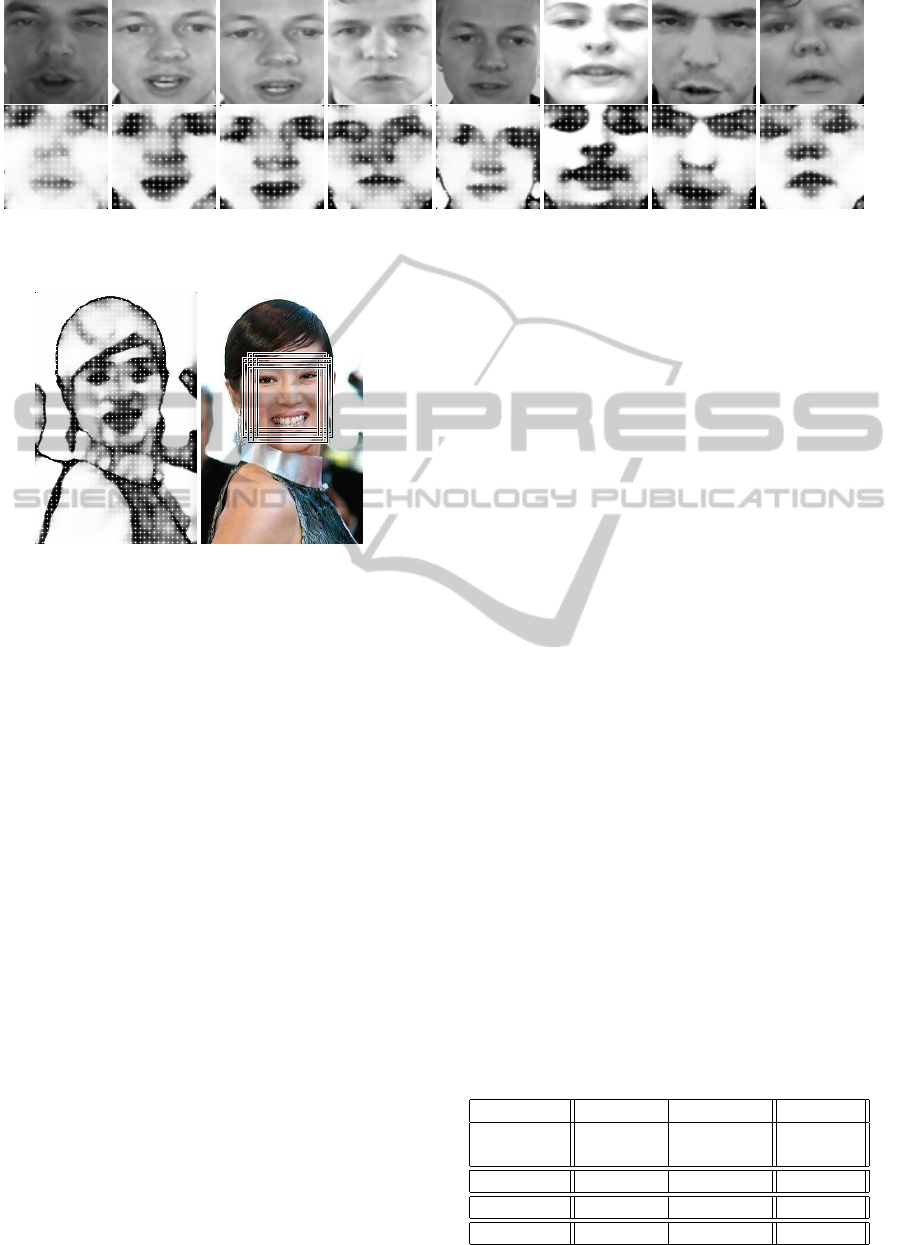
Figure 5: The visualization of distribution of temperature. The value of temperature is depicted by the level of brightness.
The firs row represents the original face images. The second row represents the visualization of temperature distribution.
Figure 6: The example of visualization of the temperature
field. The left image shows the temperature function inside
the whole input image (the value of temperature is depicted
by the level of brightness). The right image shows the detec-
tion results without the postprocessing (the detection results
are not merged).
We experimented with the proposed method and
we suggest the following configuration. The config-
uration of hierarchical energy transfer features is de-
noted as HET F. The size of temperature sources is 1
pixel and the distance between the sources is 5 pixels.
The time for temperature transfer is 250; this num-
ber represents the number of iterations because we
solve equation Eq. 1 iteratively. The mean tempera-
ture is computed inside each cell at levels 0, 1, 2, 3, 4;
it means that the mean temperature is computed in-
side the 341 cells (341 values in the feature vector).
Additionally to that, the histogram of the temperature
distribution is computed at levels 0, 1, 2, 3 (1200 val-
ues in the feature vector). Due to the fact that the cells
at l = 4 are relatively small (5× 5 pixels), we describe
these cells with the mean temperature only. Finally,
the final feature vector consists of 1541 descriptors
for one position of sliding window; we experimented
with the different settings of levels and this configura-
tion achieved the best detection results. This config-
uration is also used for the visualization of proposed
features in Fig. 2, 3, 4, 5, and 6.
For comparison, we used the detectors that are
based on the HOG features, LBP (Local Binary Pat-
terns) features (Liao et al., 2007) and Haar features
(Viola-Jones detection framework).
For the HOG features we used the identical train-
ing sets like for the proposed features (2300 posi-
tive and 4300 negative samples) and we also used the
identical size of the samples (80×80pixels). We used
the typical parameters of HOG descriptors; the size
of block = 16 × 16 pixels; the size of cell = 8 × 8
pixels; the horizontal step size = 8 pixels; the num-
ber of bins = 9. This configuration consists of 2916
HOG descriptors for one position of sliding window;
this configuration is denoted as HOG. The Support
Vector Machine classifier with Radial basis function
kernel is trained over the HOG descriptors create the
final classifier (similarly in the proposed descriptors).
For the detector based on the Viola-Jones detec-
tion framework and for the LBP-based detector, we
also used the identical training sets like for the pro-
posed features (2300 positive and 4300 negative sam-
ples) and we resized the training images to the size of
19 ×19. The detector based on the Viola-Jones detec-
tion framework is denoted as Haar, the detector based
on the LBP features is denoted as LBP. It is impor-
tant to mention that for these features, we created the
cascade classifiers.
To calculate the performance of approaches, we
collected the set of 200 images that contains 250 faces
from the Faces in the Wild dataset (Berg et al., 2005).
Before the process of performance calculation, the
positive detections were merged to one if at least 3
positive detections hit approximately one place in the
image. In Table 1, the detection results are shown.
The HOG-based detector achieved the good num-
Table 1: The detection performance.
Precision Sensitivity F1 score
HET F 98.15% 86.18% 91.77%
HET F
PCA
93.15% 93.90% 93.52%
HOG 68.75% 97.58% 80.67%
Haar 85.77% 87.55% 86.65%
LBP 62.96% 69.39% 66.02%
HierarchicalEnergy-transferFeatures
699

Figure 7: The differences between detection results. The first row: the results of HET F. The second row: the results of HOG.
The results are without the postprocessing (the detection results are not merged).
ber of true positive detections (sensitivity 97.58%),
nevertheless, the number of false positives is larger
(precision 68.75%). For example, the spherical-like
objects (e.g. balls, tennis rackets) are the problem
for the HOG-based detector. In general, this detector
detected a lot of objects in the images and many of
these objects are not faces. In contrast, the proposed
method achieved the very promising numbers of true
positive detections (sensitivity 86.18%) and the pro-
posed descriptors also achieved the small number of
false positive detections (precision 98.15%) using 2×
less descriptors than in the HOG-based detector. We
experimented with the different settings of HOG de-
scriptors, however, without the increasing the datasets
for training, the HOG-based detector was not able to
achieve better results. The examples of the cases in
which the HOG-based detector failed are shown in
Fig. 7.
The cascade classifier of Haar features achieved
better detection results than HOG descriptors (F1
score 86.65%). Nevertheless, this detector needed to
increase the number of training samples to achieved
better results. This problem also occurs in the LBP-
based detector (F1 score 66.02%).
With respect to the fact that the proposed features
had a low number of false positive detections (50
false positive detection windows of 7 million detec-
tion windows) and the number of descriptors (1541)
achieved the good results (F1 score 91.77%), we re-
duced the number of descriptors using PCA (Princi-
pal Component Analysis). To determine the number
of principal components, we used the 200 principal
components (corresponding to the largest eigenval-
ues); the final feature vector is the vector with di-
mensionality d = 200. The detector that are based
on this subset of the proposed features is denoted as
HET F
PCA
.
The detector based on the subset of the proposed
features, achieved F1 score 93.52%; we note that the
number of false positives is larger sing this subset nev-
ertheless the detector achieved the best detection re-
sults (the examples in which the HET F
PCA
detector
failed are shown in 8). The detector also shows that
the appearance of the faces can be successfully de-
scribed using the distribution of temperature with a
relatively small set of the training samples and with a
relatively small set of descriptors compared with the
state-of-the-art descriptors. The detection results of
the detector based on the HET F
PCA
configuration are
shown in Fig. 9.
If we discuss about the computational time of the
algorithm, the measurement of the time can be di-
vided into two parts. The first part contains the time
that is necessary for the temperature transfer inside
the image. Since we solve the diffusion equation it-
eratively, the number of iterations has a major im-
pact on the computational time of this part. We have
developed the GPU (CUDA) and CPU (SSE/AVX)
versions for solving the temperature transfer process.
The computational time of GPU version is 40 mil-
liseconds, the time of CPU version is 150 millisec-
onds for 150 iterations and for the size of input image
640×480 pixels.
The second part contains the time that is required
for composing the feature vector. The mean tempera-
ture inside the rectangular cells is computed in a con-
stant time using the integral image. The calculation
of histogram of each cell took 1 millisecond for one
position of sliding window (80×80 pixels). Finally,
the recognition time of feature vector depends on the
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
700
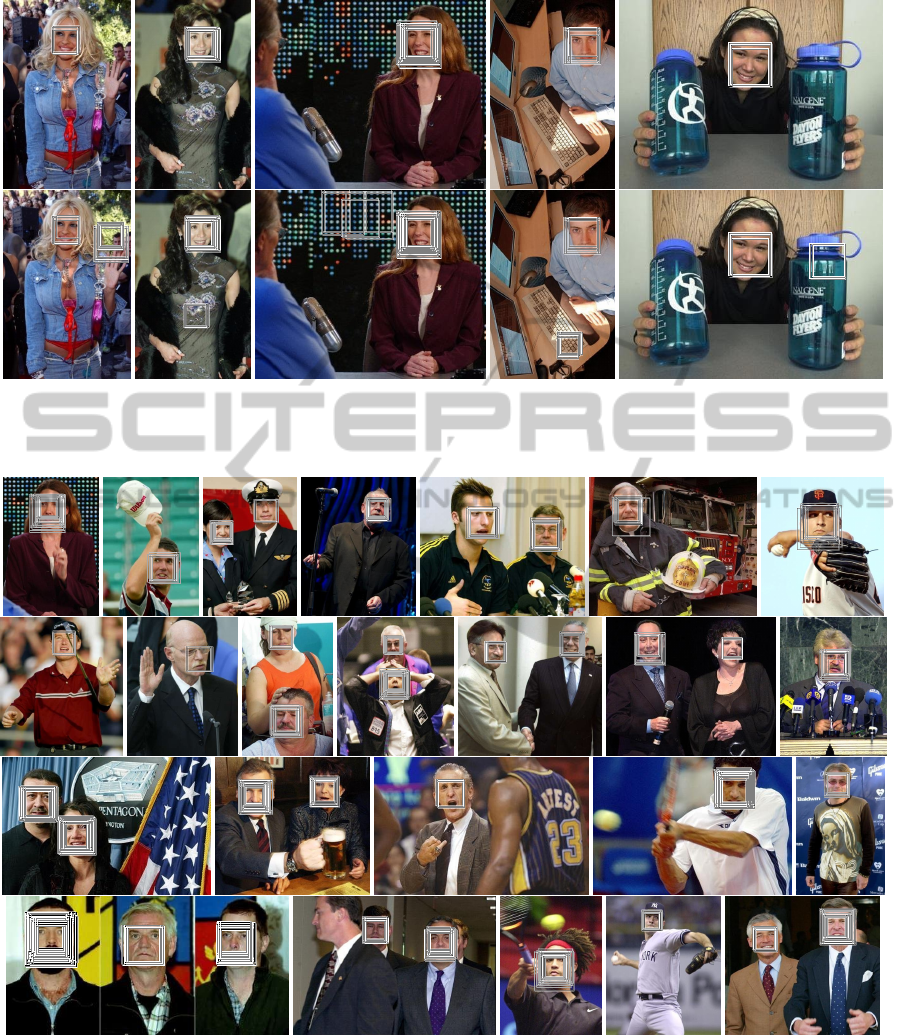
Figure 8: The detection results of HET F
PCA
in which the detector failed. The first row: the results of HET F (without PCA).
The second row: the results of HET F
PCA
(with PCA). The results are without the postprocessing (the detection results are not
merged).
Figure 9: The detection results of HET F
PCA
. The results are without the postprocessing (the detection results are not merged).
chosen classifier.
5 CONCLUSIONS
In the paper, we proposed the interesting method for
object description. The method is based on the fact
that the appearance of the objects can be described us-
ing the function of temperature distribution. The key
part of the proposed method is the process of tem-
perature transfer that is carried out during a chosen
time inside the image. This process is the most time-
consuming part of the method and we will focus on
the time complexity of the method in the future works.
HierarchicalEnergy-transferFeatures
701

However, compared with the state-of-the-art descrip-
tors, the proposed descriptors achieved the very good
detection results and we will also focus on detection
of other objects of interest using this method.
ACKNOWLEDGMENTS
This work was supported by the SGS in VSB Techni-
cal University of Ostrava, Czech Republic, under the
grant No. SP2014/170.
REFERENCES
Berg, T. L., Berg, A. C., Edwards, J., and Forsyth, D.
(2005). Who’s in the picture. In Saul, L. K., Weiss,
Y., and Bottou, L., editors, Advances in Neural Infor-
mation Processing Systems 17, pages 137–144. MIT
Press, Cambridge, MA.
Bosch, A., Zisserman, A., and Munoz, X. (2007). Repre-
senting shape with a spatial pyramid kernel. In Pro-
ceedings of the 6th ACM international conference on
Image and video retrieval, CIVR ’07, pages 401–408,
New York, NY, USA. ACM.
Boser, B. E., Guyon, I. M., and Vapnik, V. N. (1992).
A training algorithm for optimal margin classifiers.
In Proceedings of the 5th Annual ACM Workshop
on Computational Learning Theory, pages 144–152.
ACM Press.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886 –
893 vol. 1.
Felzenszwalb, P., Girshick, R., McAllester, D., and Ra-
manan, D. (2010). Object detection with discrim-
inatively trained part-based models. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(9):1627–1645.
Ferrari, V., Marin-Jimenez, M., and Zisserman, A. (2008).
Progressive search space reduction for human pose es-
timation. In Computer Vision and Pattern Recogni-
tion, 2008. CVPR 2008. IEEE Conference on, pages
1–8.
Freund, Y. and Schapire, R. E. (1995). A decision-theoretic
generalization of on-line learning and an application
to boosting. In Proceedings of the Second Euro-
pean Conference on Computational Learning The-
ory, EuroCOLT ’95, pages 23–37, London, UK, UK.
Springer-Verlag.
Fusek, R., Sojka, E., Mozdren, K., and Surkala, M. (2013).
Energy-transfer features and their application in the
task of face detection. In Advanced Video and Signal
Based Surveillance (AVSS), 2013 10th IEEE Interna-
tional Conference on, pages 147–152.
Hadid, A., Pietikainen, M., and Ahonen, T. (2004). A dis-
criminative feature space for detecting and recogniz-
ing faces. In Computer Vision and Pattern Recogni-
tion, 2004. CVPR 2004. Proceedings of the 2004 IEEE
Computer Society Conference on, volume 2, pages II–
797–II–804 Vol.2.
Lee, K., Ho, J., and Kriegman, D. (2005). Acquiring linear
subspaces for face recognition under variable light-
ing. IEEE Trans. Pattern Anal. Mach. Intelligence,
27(5):684–698.
Liao, S., Zhu, X., Lei, Z., Zhang, L., and Li, S. Z. (2007).
Learning multi-scale block local binary patterns for
face recognition. In ICB, pages 828–837.
Lienhart, R. and Maydt, J. (2002). An extended set of haar-
like features for rapid object detection. In Image Pro-
cessing. 2002. Proceedings. 2002 International Con-
ference on, volume 1, pages I–900–I–903 vol.1.
Ojala, T., Pietik
¨
ainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classification
based on featured distributions. Pattern Recognition,
29(1):51–59.
Papageorgiou, C. and Poggio, T. (2000). A trainable system
for object detection. Int. J. Comput. Vision, 38(1):15–
33.
Perona, P. and Malik, J. (1990). Scale-space and edge detec-
tion using anisotropic diffusion. IEEE Trans. Pattern
Anal. Mach. Intell., 12:629–639.
Tan, X. and Triggs, B. (2010). Enhanced local texture fea-
ture sets for face recognition under difficult lighting
conditions. Image Processing, IEEE Transactions on,
19(6):1635–1650.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Computer Vi-
sion and Pattern Recognition, 2001. CVPR 2001. Pro-
ceedings of the 2001 IEEE Computer Society Confer-
ence on, volume 1, pages I–511 – I–518 vol.1.
Zhang, L., Chu, R., Xiang, S., Liao, S., and Li, S. Z. (2007).
Face detection based on multi-block lbp representa-
tion. In Proceedings of the 2007 international confer-
ence on Advances in Biometrics, ICB’07, pages 11–
18, Berlin, Heidelberg. Springer-Verlag.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
702
