
Segmentation Ensemble
A Knowledge Reuse for Model Order Selection using Case-based Reasoning
Pakaket Wattuya
1
and Ekkawut Rojsattarat
2
1
Department of Computer Science, Faculty of Science, Kasetsart University, Bangkok, Thailand
2
Department of Computer Science, Faculty of Science at Si-Racha,
Kasetsart University Si-Racha Campus, Chonburi, Thailand
Keywords:
Image Segmentation Ensemble, Case-based Reasoning, Model Order Selection.
Abstract:
Cluster ensemble has emerged as a powerful technique for improving robustness, stability, and accuracy of
clustering solutions, however, automatic estimating the appropriate number of clusters in the final combined
results remains unsolved. In this paper we present a new approach based on a case-based reasoning to handle
this difficult task. The key success of our approach is a novel use of cluster ensemble in a different role from
the past. Each ensemble component is viewed as an expert domain for building a case base. Having benefited
from the information extracted from cluster ensemble, a case-based reasoning is able to settle efficiently the
appropriate number of clusters underlying a clustering ensemble. Our approach is simple, fast and effective.
Three simulations with different state-of-the-art segmentation algorithms are presented to illustrate the effi-
cacy of the proposed approach. We extensively evaluate our approach on a large dataset in comparison with
recent approaches for determining the number of regions in segmentation combination framework. Exper-
iments demonstrate that our approach can substantially reduce computational time required by the existing
methods, more importantly, without the loss of segmentation combination accuracy. This contribution makes
the segmentation ensemble combination concept more feasible in real-world applications.
1 INTRODUCTION
Cluster ensemble has emerged as a powerful tech-
nique for dealing with several difficulties in clustering
problems. Thus far, it has been used for dealing with
1) instability of clustering algorithms (Topchy et al.,
2005; Franek et al., 2012); 2) sensitivity to noise,
outliers or sample variations (Nguyen and Caruana,
2007); and 3) inaccuracy of individual clustering
algorithms (Vega-pons and Ruiz-shulcloper, 2011;
Strehl and Ghosh, 2002). Within this role, cluster
ensemble integrates solutions from multiple different
clusterings into a single better solution, normally, be-
yond what a single clustering algorithm can achieve.
In addition to the benefits outlined above, we
present a novel use of cluster ensemble to handle
another most difficult problem in data clustering,
namely, a model order selection - the problem of es-
timating the optimal number of clusters in data. Over
the years, numerous approaches have been proposed
to this problem. A comprehensive survey of meth-
ods for estimating the number of clusters is given in
(Hardy, 1996; Milligan and Cooper, 1985), as well
as references therein. There have also been several
researches devoted to this issue known as the cluster
validation problem, whose comprehensive survey can
be found in (Halkidi et al., 2001; Dubes, 1993). How-
ever, many of such statistical and model-based ap-
proaches often require high computation which is not
suitable for large data (such as images) and real-time
applications, for example, a real-time image segmen-
tation problem. The goal of this paper is to provide a
learning procedure to deal with model order selection
in an image segmentation ensemble problem.
Image segmentation ensemble combination has
emerged in a similar manner as cluster problems,
namely, in order to improve the robustness, stabil-
ity, and accuracy of segmentation results. In general,
the desired number of regions is not known in ad-
vance and is often specified by a human user. Most
segmentation ensemble approaches assume a known
number of regions (Jiang and Zhou, 2004; Rohlfing
et al., 2004; Fischer and Buhmann, 2003). The ap-
proaches for automatically estimating the number of
regions are mostly based on a validity index where the
optimal combination solution with a desired number
287
Wattuya P. and Rojsattarat E..
Segmentation Ensemble - A Knowledge Reuse for Model Order Selection using Case-based Reasoning.
DOI: 10.5220/0004830102870295
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 287-295
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

of regions is found from a series of candidate combi-
nation solutions under a different number of regions.
Rabinovich et al. (Rabinovich et al., 2006) proposed a
validity index based on the concept of cluster stability
and used it to find a shortlist of most stable segmen-
tations from a large number of possible segmentation
solutions. Wattuya et al. (Wattuya et al., 2008) pro-
posed a validity index based on the concepts of gen-
eralized median and mutual information. Their seg-
mentation validation criterion demonstrated promis-
ing results. More details of this method will be given
in the experiment section as we will use it in compar-
ison with our proposed method. The main drawback
of these approaches is their high computation time re-
quired for computing a series of candidate combina-
tion solutions and for validating them.
In a general data clustering ensemble, Fred and
Jain (Fred and Jain, 2005) proposed a thresholding
criterion for estimating the true number of clusters
called a lifetime criterion. The k - cluster lifetime is
defined as the range of threshold values on the den-
drogram that lead to the identification of k clusters.
The optimal number of clusters is determined as the
one with the highest lifetime value. The important
drawback of this criterion is that it does not work well
with complex data (i.e. not well separated and a non-
spherical cluster shape). It requires a large size of en-
semble (e.g. 200 clusterings per ensemble) in order
to ensure convergence of the method. This is quite
infeasible in practice for an image segmentation com-
bination approach.
In this work, we propose a case-based reasoning
(CBR) approach to handle this task. CBR is suitable
for handling our problem in many aspects (will be dis-
cussed in Section 3). A knowledge domain for build-
ing a case base is derived from the segmentation en-
semble in a framework of knowledge reuse. Once a
case base is built, the solution (i.e. the number of re-
gions) of a new problem is derived by adapting the
solutions of the previous cases retrieved from the case
base. The approach is designed to be applicable to
practically any image segmentation method and im-
age segmentation combination framework. The main
advantages of our approach over the existing methods
are that i) it requires significantly less computation
time, i.e. no time required for computing a series of
candidate combination solutions and no time required
for searching a large set of candicate solutions for the
optimal combination solutions; ii) it can work well
with a small size of segmentation ensemble. These
advantages make the concept of image segmentation
combination more feasible in real-world applications.
In fact, the idea of the use of segmentation ensem-
ble in model order selection is partly motivated by the
problem of image segmentation ensemble combina-
tion. In a frameworkof image segmentation combina-
tion, a segmentation ensemble needs to be generated
for combination process. Thus, instead of only us-
ing it for a combination purpose, we propose to use it
for determining the number of regions in a final com-
bined result, as well. Hence, no additional work for
generating a segmentation ensemble is required in this
approach.
We extensively evaluate our approach on a large
dataset. Recent approaches for determining the num-
ber of regions based on the median concept (Wattuya
et al., 2008) and minimum description length prin-
ciple (Rao et al., 2009) are described in Section 4
where they are compared with our method. Three
simulations with different state-of-the-art segmenta-
tion algorithms are presented to illustrate the efficacy
of the proposed approach. Each segmentation algo-
rithm simulates different characteristics of experts to
build the case base. The experiments show promising
results. Our CBR approach can significantly reduce
the computational time required by the existing model
order selection methods without the loss of segmen-
tation combination accuracy.
The paper is organized as follows. We begin with
a review of using CBR on image segmentation prob-
lem. Then, our proposed CBR approach is described
in Section 3. Experimental results are described in
Section 4. Finally, future work is discussed to con-
clude the paper.
2 RELATED WORK
The concept of CBR as a problem-solving technique
has been used in a wide range of application areas in-
cluding computer vision applications. CBR has been
successfully applied not only in low-level tasks in
computer vision, such as image segmentation (Perner,
1999; Frucci et al., 2008), but also in high-level tasks,
such as image interpretation (Perner et al., 2003) and
medical image understanding (Grimnes and Aamodt,
1996). The works (Perner, 1999; Frucci et al., 2008)
used CBR for solving a parameter selection problem
which differs from our task. They used CBR to find an
appropriate parameter setting for each individual im-
age to ensure that good segmentation results are ob-
tained even if the segmentation algorithm is applied
to images with different characteristics. However, the
problem of parameter selection seems to be less com-
plicated than our problem of determining an appropri-
ate number of clusters. For a particular segmentation
algorithm, solutions of parameter selection problem
of images with similar characteristics tend to be the
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
288

same, while solutions of model order selection prob-
lem may be totally different. In the next section, we
will describe how we use segmentation ensemble as
an expert domain to cope with this difficulty.
3 OUR PROPOSED CBR
CBR is a problem-solving technique that uses previ-
ous cases or past experiences to solve new problems
(Kolodner, 1993; Leake, 1996). CBR is suitable for
dealing with our problem for two reasons. Firstly,
the problem of image segmentation is ill-defined. It
is hardly possible to explicitly express it in terms of
rules or models. However, these rules/models are not
required by CBR. Secondly, CBR can learn for itself
to solve future problems in an automatic way.
Segmentation ensemble is a key component for
building our CBR. We use it as a knowledge domain
for generating a case base. Each segmentation so-
lution in an ensemble (computed from different seg-
menters) can be viewed as a judgment from individ-
ual experts on the input image. Having benefited from
this information, the CBR will be able to settle natu-
rally the appropriate number of regions underlying a
segmentation ensemble. In this section, we describe
the details of building our case base. We begin by
describing the way we extract knowledge from a seg-
mentation ensemble and the way we represent it as a
case in a case base. Then we describe how we retrieve
similar cases from the case base, and finally, how we
adapt them to the new problem.
3.1 Knowledge Extraction
The first task of building a case base is to determine
the problem features that make up a case. These fea-
tures should define our problem well. Thus, we first
investigate the connection between image features, in-
formation provided by a segmentation ensemble, and
a true number of regions (k
∗
) in an image.
Supposition I: Image Features vs. k
∗
The first intuitive assumption is about the relation be-
tween low-level image features and a number of re-
gions in an image. However, it is not easy to model
or define a correlation between them. It is typical that
two or more images happen to have similar feature
values but different number of regions and it is often
that two or more images with different feature values
have similar number of regions.
Supposition II: Median of k
i
of Ensemble vs. k
∗
The second conjecture was made based on the as-
sumption that the number of regions of segmentations
in an ensemble (will be denoted as k
i
- a number of re-
gions of the ith segmentations in an ensemble) could
be used to imply k
∗
. Thus, simple statistical measures
such as the mean and the median of k
i
have been in-
vestigated in (Wattuya et al., 2012). The work pre-
sented in (Wattuya et al., 2012) is our first attempt
to develop our idea of using CBR for model order
selection. In that work we used both low-level fea-
tures and the median of k
i
to represent a case in a case
base (we applied the fuzzy c-means algorithm to han-
dle the ambiguity of low-level features). The experi-
ments showed good results, however, we later found
out that the median of k
i
works well when the values
of k
i
is in a normal range (e.g. k ∈ [2, 60]). For ex-
ample, if an image segmentation algorithm used for
generating segmentation ensembles tends to produce
over-segmentation results (e.g.
¯
k > 50, the median of
k
i
would be less appropriate for implying a true num-
ber of regions. This is true for the mean of k
i
. In our
experments, this situation is simulated and the exper-
imental results show the ineffiectiveness of using the
meadian and the mean alone.
Supposition III: Segmentation Quality vs. k
∗
The assumption we used in the proposed approach is
based on the quality of segmentations in an ensemble.
Thus, two pieces of information are extracted from
each segmentation solution in an ensemble. For each
segmentation S
i
, the first piece of information is the
number of regions k
i
and the second piece is the qual-
ity q
i
. The first piece of information can be viewed as
the decision of an expert on the k
∗
of a given image,
while the second piece reflects the expertise of that
expert.
Let us first consider good quality segmentations
in an ensemble. What do they tell us? Good quality
segmentations, whose q
i
is relatively high, tell us that
their corresponding k
i
are reliable and very likely to
be k
∗
. Based on this assumption, we can further im-
ply that segmentations with similar values of q
i
and
similar values of k
i
tend to have similar values of k
∗
.
On the other hand, segmentations with similar values
of q
i
but different values of k
i
should have different
values of k
∗
. Bad quality segmentations are not abso-
lutely useless. They can be used to help estimate k
∗
.
We consider three situations:
• Low k
∗
: q
i
of high k
i
would be low. The further
the k
i
is away from k
∗
, the lower the value of q
i
is.
This implies that the value of k
∗
is not high.
• High k
∗
: q
i
of low k
i
would be low. This implies
that the value of k
∗
of this image is not low.
• Moderate k
∗
: q
i
of too low or too high k
i
would
be low. This implies that the value of k
∗
of this
image is not too low or too high.
SegmentationEnsemble-AKnowledgeReuseforModelOrderSelectionusingCase-basedReasoning
289

It is possible that some bad segmentations may
not follow the above assumption, since the bad seg-
mentations are arbitrarily bad in their own way. How-
ever,in our experiments we observed that the majority
of them act in the above manner since we used ex-
pert segmentation algorithms, not arbitrary ones (e.g.
k-means). Nonetheless, we manage handle this un-
certainty in two ways. The first way is to exclude
a few of the worst segmentations in each ensemble
from consideration. The second way is to general-
ize a case base. We will discuss how to evaluate the
quality of segmentations in an ensemble later in this
section. In the rest of the paper, we will call q
i
and k
i
extracted from segmentations in an ensemble ensem-
ble features.
We claim that ensemble features are higher related
to k
∗
than low-level image features. We test this hy-
pothesis by clustering 300 images from BSDS dataset
into C clusters using ensemble features and low-level
image features, separately. Image features are con-
trast, correlation, homogeneity, and entropy (Haralick
et al., 1973). For each cluster, we compute the stan-
dard deviation of k of images within the same cluster.
Small standard deviation of k indicates that all im-
ages in the same cluster have k close to each other.
On the other hand, large standard deviation of k indi-
cates that the number of k within a cluster are highly
varied. Therefore, we expect to have a low standard
deviation of k for each cluster. The numbers of k used
in this test are taken from human segmentations of
BSDS dataset. Since one image has multiple human
segmentations, the average of them are used. For en-
semble features, we generated three sets of features
which are based on three different image segmenta-
tion algorithms (which will be described later in Sec-
tion 4). For each set of features, we conducted a se-
ries of experiments with several clustering algorithms
with C ∈ [30,40,50,60,70] clusters. The three clus-
tering algorithms with the largest Silhouette index and
Calinski-Harabasz index values (i.e. complete link-
age, average linkage, and k-means) show that the av-
erage of standard deviations of k of clusterings using
ensemble features is smaller than the average of stan-
dard deviations of k of clusterings using low-level im-
age features. This indicates that ensemble features are
more related to k
∗
than low-level features.
3.2 Building a Case Base
3.2.1 Case Description
Given a segmentation ensemble S = {S
1
,...,S
N
} of
N segmentations of the same image, each segmen-
tation can be produced by using different algorithms
or with the same algorithm but different parameter
values. Let K = {k
1
,·· · , k
N
} be a set of the num-
ber of regions in the segmentations in S. As we dis-
cussed earlier, a case is described as a feature vector
x = {hk
1
,q
1
i,··· , hk
r
,q
r
i}. k
i
and q
i
are the number
of regions and the quality value of the ith segmenta-
tion in an ensemble. r = [1, N] is the number of seg-
mentations to be used.
Since in practice the ground truth data is not avail-
able for evaluating the quality of segmentation solu-
tions, an unsupervised validation method has to be
used. In this work, we proposed to apply two different
concepts for evaluating the quality of segmentations.
The first one is based on the concept of mutual infor-
mation, while the second one is based on the concept
of minimum description length (MDL) principle.
SNMI Quality Measure. The SNMI measure is first
introduced by (Strehl and Ghosh, 2002) for design-
ing consensus functions. Given an ensemble E of
r clustering solutions denoted by E = C
1
,.. .,C
r
,
Strehl and Ghosh suggested that a good consensus
clustering should maximize the following criterion:
SNMI(C,E) =
∑
r
i=1
NMI(C,C
i
), where NMI is the
normalized mutual information which is used as simi-
larity measures in many contexts including image seg-
mentation (Fowlkes et al., 2003; Franek et al., 2012;
Wattuya et al., 2008). The NMI value is maximized
to be one if two clusterings define the same partition
of the data. In contrast, if two clusterings define com-
pletely independent partitions, the NMI value is 0. We
propose to apply SNMI as a quality index (q) and use
it for a case description. Higher SNMI value indicates
higher quality of segmentaiton that can capture more
information among other segmentations in an ensem-
ble.
MDL Quality Measure. The MDL principle can
be used to encode image information (e.g. texture,
boundary, color) and evaluated segmentation quality
based on a coding length function. It defines the best
fitted segmentation as the one that produces the short-
est code length of the image. Hence, a low value of
MDL indicates a good segmentation result. In this
work we adapt the MDL criterion used for image seg-
mentation as proposed in (Rao et al., 2009). For ad-
ditional details the readers are referred to (Rao et al.,
2009). Since the range of values of k
i
and q
i
is rela-
tively large, all values are normalized into a range of
0 to 10.
Note that the main advantages of SNMI-based
measure over MDL-based measure are that it is fast
computation and requires no original image data in
computation process. This is very useful when the
original data are not available.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
290

3.2.2 Case Solution
A case solution is defined as an approximate num-
ber of regions,
ˆ
k, in a final segmentation combina-
tion result. We estimate the number of
ˆ
k through the
framework of image segmentation combination. The
random walker-based segmentation combination al-
gorithm (Wattuya et al., 2008) is used to produce a
series of combination results with different number of
k ∈ [k
min
,k
max
]. Once candidate results are obtained
by a combination algorithm, the next step is to eval-
uate the combination solutions to determine an opti-
mal one.
ˆ
k is then defined as the number of regions
of the optimal combination result. The accuracy of
ˆ
k
depends on a segmentation validation index. In this
work we proposed two validity criteria for choosing
the optimal combination result. The first criterion is
based on the NMI concept and the second criterion is
based on the MDL principle.
NMI-based Validity Criterion. This criterion follows
the concept of mutual information mentioned above.
The best combined segmentation result should share
the largest amount of information with all correspond-
ing human segmentations. The candidate combina-
tion result with the highest NMI value is chosen as
the optimal combination result. This criterion is a su-
pervised method and requires ground-truth segmenta-
tion. However, the human segmentations is only used
for computing the case solutions in a training process.
Thus, the on-line process of our approach is still fully
automatic and requires no human intervention. We
will call this approach CBR-NMI.
MDL-based Validity Criterion. The MDL we used
here is the same as the one we use for evaluating the
quality of segmentations described above. The MDL
criterion defines the optimal combination solution as
the one that minimizes its total coding length. This
criterion is an unsupervised method and requires no
human segmentation data. However, the accuracy of
ˆ
k would not be as accurate as the supervised method.
We will call this approach CBR-MDL.
A case in a case base is thus defined as a problem-
solution pair c = (x,
ˆ
k), where
ˆ
k is a solution corre-
sponding to a problem feature vector x defined above.
3.3 Case Retrieval
Case retrieval is a process of finding the cases that
are closest to the new problem. The cases with the
highest similarity values will be chosen and their as-
sociated solutions will be adapted to the new prob-
lem. Because our case description is extracted from
a segmentation ensemble, its accuracy depends di-
rectly on the performance of image segmentation al-
gorithm that we use to generate a segmentation en-
semble. Practically, a segmentation ensemble typi-
cally contains incorrect segmentations. The informa-
tion about k∗ extracted from them is not absolutely
accurate. Hence, it would be more beneficial to com-
pensate their errors by generalizing the cases in a case
base and use a case prototype as a case representative,
instead of using each individual case on its own.
For this purpose, we apply a k-means clustering
algorithm to cluster the cases into c clusters. The
cases with similar case descriptions will be clustered
together. The c cluster centers are used as case repre-
sentatives of the whole cases in the case base and their
solutions are defined as the average of the solutions
of the cases in the same cluster. It is not unusual that
the solutions of the cases in the same cluster are not
exactly the same, however, a small difference among
them is observed. Actually, the averaging of the case
solutions is a good concept for error compensation of
individual case solutions.
It is interesting to note that k-means clustering
used in our approach not only benefits for a case base
generalization but also for decreasing the number of
cases required for matching in the retrieval step. In-
stead of matching all the original cases in the entire
case base, the task of case matching boils down to
matching the new case with the c new case represen-
tatives only. Since our case is represented as a real-
value feature vector, the simple Euclidean distance is
used in a case matching process.
We note here that in our previous work (Wattuya
et al., 2012) we used the fuzzy c-means algorithm for
a case base generalization since we needed it to han-
dle uncertainty in both case descriptions (as discussed
earlier) and case solutions. In that work a case solu-
tion was also derived from a segmentation ensemble.
Hence, it is more uncertain and more inaccurate than
the case solution defined in this work.
3.4 Cases Adaptation
According to our case description, it is impossible that
a new case will exactly match any case in a case base.
Thus, the case that is closest to the new case will be
retrieved, and the solution of a retrieved case will be
applied directly to the new case. However, there is
a situation where the new case is close to more than
one case in a case base. For example, the difference
among the distances between the new case and those
cases is very small (i.e. less than 0.005). In this sit-
uation, a group of cases that are closest to the new
case will be retrieved. The solution for the new case
is then derived by averaging the solutions of the re-
trieved cases.
SegmentationEnsemble-AKnowledgeReuseforModelOrderSelectionusingCase-basedReasoning
291
4 EXPERIMENTS
4.1 Segmentation Ensemble Generation
We tested our approach on 300 natural images of
size 481 × 321 from the BSDS dataset (Martin et al.,
2001), each having multiple manual segmentations.
We apply NMI to quantitatively evaluate the segmen-
tation quality against the ground truth. One segmen-
tation result is compared to all manual segmentations
and the average NMI (ANMI) is reported. Larger
ANMI values indicate better combination results that
share more information with the ground truths.
In the experiments, three state-of-the-art segmen-
tation algorithms were used as baseline segmentation
algorithms for generating a set of initial segmenta-
tions to be combined. The three segmentation algo-
rithms are the graph-based algorithm (FH) (Felzen-
szwalb and Huttenlocher, 2004), the mean shift-based
algorithm (MS) (Comaniciu and Meer, 2002), and the
region growing-based algorithm (JSEG) (Deng and
Manjunath, 2001). These algorithms were chosen be-
cause of their good performance, computational effi-
ciency and different segmentation behavior.
A segmentation ensemble is obtained by varying
the parameter values of the same segmentation algo-
rithm in an appropriate range as summarized in Ta-
ble 1. The total number of parameter combinations
for each algorithm is equal to 24 combinations. For
each combination of parameters, the segmentation al-
gorithms are run over the complete set of 300 images
from the BSDS dataset to form three sets of segmenta-
tion ensembles (with 24 segmentations per ensemble).
We call the set of 300 segmentation ensembles pro-
duced by FH, MS, and JSEG algorithms as ’FH en-
sembles’,’MS ensembles’, and ’JSEG ensemble’, re-
spectively.
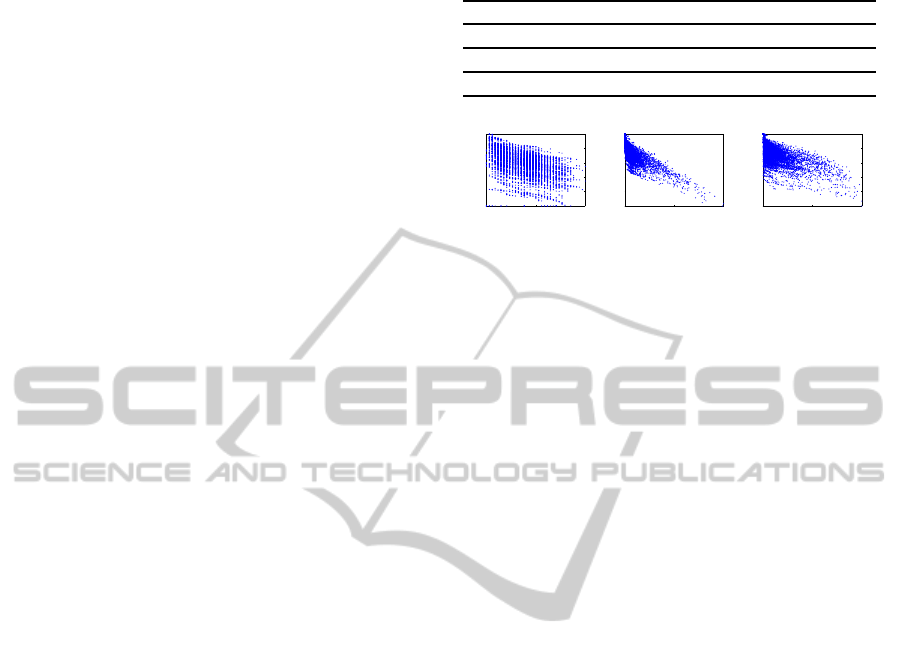
The three segmentation algorithms have different
segmentation behavior, resulting in the difference of
segmentation ensemble characteristics as illustrated
in Figure 1. The x-axis is the quality of segmenta-
tions q (high value of q indicates good segmentation
quality) and the y-axis is the number of region k. FH
algorithm tends to produce segmentation results with
a normal range of k ∈ [1, 40]. Thus, it has nearly uni-
form distribution over the full range (as shown in the
first plot). MS and JSEG algorithms tends to produce
segmentation results with a much wider range of k.
The dense distribution in the upper left area of the
plots correspond to the highly over-segmentation be-
havior of the segmentation algorithms. Notice that
segmentations with overly high k have very low q
(close to 0). Our experiments demonstrate that our
CBR approach can work well for all data distribution.
Table 1: Segmentation algorithms and their parameters.
Algos. Parameter values
FH σ = {.4,.5,· ·· ,.9}, K = {150,300,500,700},M = 1500
MS h
s
= {8,16},h
r
= {7,11,15}, M = {100,500, 1000,1500}
JSEG l = {1,2,3},q = {300, 600}, m = {0.2,0.4,0.6,0.8}
0 5 10
0
2
4
6
8
10
FH ensemble
normalized k
normalized q
0 5 10
0
2
4
6
8
10
MS ensemble
normalized k
normalized q
0 5 10
0
2
4
6
8
10
JSEG ensemble
normalized k
normalized q
Figure 1: The distribution of three sets of ensembles after
normalized into a range [0, 10].
4.2 Model Order Selection Methods
Four methods for determining the number of regions
in a final combination results are used for compari-
son: the generalized median-based validation method
(GM) (Wattuya et al., 2008), the MDL-based valida-
tion method (MDL) (adapted from (Rao et al., 2009)),
and two statistical methods based on the mean and the
median of a number of regions in an ensemble.
For the first two methods, the random walker-
based segmentation combination algorithm (Wat-
tuya et al., 2008) is applied to generate a series
of candidate combination results with different k ∈
[k
min
,k
max
]. Then, an optimal segmentation com-
bination result is chosen as the one that optimized
the validity criterion. The generalized median-based
method selects an optimal solution as the one with the
minimal average NMI distance (i.e. 1- NMI) among
all individual segmentations in an ensemble. This ap-
proach is regarded as an approximation of the GM
segmentation of the input ensemble by investigating
a subspace of U, which consists of the combination
segmentations for the considered range of k only. For
the MDL-based method, a similar MDL function used
for building a case base is used. The optimal segmen-
tation combination result is the one with the shortest
coding length. For the last two statistical measures,
the mean and the median of a number of regions in an
ensemble are first computed. Then, the combination
algorithm is applied to generate a combination result
with k equals the mean/median of a number of regions
in an ensemble.
4.3 Experimental Results
Comparison of Model Oder Selection Approaches
For our CBR approach, the 300-image dataset is ran-
domly partitioned into a 200-image training set and
a 100-image test set. Three non-overlapping test set
are generated. For each test set we run the k-means
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
292
Table 2: Average performance overall three test sets.
Ensemble Model order selection method
MDL quality measure SNMI quality measure
GM MDL Average Median CBR-NMI CBR-MDL CBR-NMI CBR-MDL
FH 0.6179 0.6167 0.6097 0.6077 0.6162 0.6151 0.6149 0.6127
MS 0.6267 0.6252 0.6072 0.6147 0.6296 0.6291 0.6281 0.6293
JSEG 0.5911 0.5946 0.5889 0.5873 0.5967 0.5914 0.5953 0.5937
Table 3: Model order selection methods, their computational requirements, and their actual computation time (in second).
Approach Number of Number of MDL Number of NMI Number of Euclidean Total time
combination computationI computation distance computation
GM |k| (20.9757) - |k|N (5.8490) - (26.8247)
MDL |k| (20.9757) |k| (48.4283) - - (69.4040)
CBR (MDL measure) 1 (1.1832) N (21.2152) - c (0.0001) (22.3985)
CBR (SNMI measure) 1 (1.1832) - N(N − 1)/2 (1.4083) c (0.0001) (2.5916)
algorithm 100 times and retain only the best results.
Note that a small variance of ANMI over 100 runs
is observed. The CBR performance reported in Ta-
ble 2 is the average performance over all three test
sets. For all experiments we set the number of en-
semble members (r) to 20 and the number of clusters
(c) to 50. Note that we have studied the sensitivity of
our method on the r and c by varying their values in
a proper range. No significant change in the perfor-
mance is observed.
As expected, the mean and median approach ob-
tained the worst performance in all scenarios. As we
discussed earlier, the number of regions in an ensem-
ble depends heavily on the behavior of segmentation
algorithm used and has a weak correlation to the k
∗
.
It is not surprising that the performance of CBR-NMI
is better than that of CBR-MDL because the case
solutions of CBR-NMI are computed based on hu-
man segmentations, while the case solutions of CBR-
MDL are computed based on the MDL-based objec-
tive function. The solutions of CBR-NMI should be
closer to the k
∗
than the solution of CBR-MDL. Even
though the CBR based on SNMI acheived slightly
lower performance than the CBR based on MDL, it
has two dominant advantages, namely, it performs
much faster and requires no original image data in the
computation.
For MS and JSEG ensembles, the performances
of both CBR-NMI and CBR-MDL are slightly bet-
ter than the performances of GM and MDL, while
the performance of CBR-NMI and CBR-MDL are
slightly worse than the performances of GM and
MDL for an FH ensemble. However, the standard de-
viation of the performance accuracy of our CBR ap-
proach is better than GM and MDL approaches in all
cases. This indicates that our approach is more stable
than the rest. Even though our CBR approach does
not show a significant improvement over the other
methods, we argue that it does show the significant
reduction of computation time, especially the CBR
approach based on SNMI quality measure. This con-
tribution would make the segmentation combination
framework more feasible in practical applications.
Comparison of Computation Time
We summarize the details of the four methods in com-
parison with the proposed CBR approach in Table 3
in terms of the four computation requirements: i) the
number of combination results to be computed; ii) the
number of segmentations that need to be evaluated us-
ing the MDL quality criterion; iii) the number of times
needed for computing a distance between two seg-
mentations based on NMI measure; and iv) the num-
ber of case matching using Euclidean distance used in
the CBR approach. We did not discuss about the time
spend on a generation of segmentation ensembles re-
quired by a segmentation algorithm because this step
is a preprocessing task needed by all approaches.
In the table |k| refers to a number of all possible
combination results with different number of regions
in [k
min
,k
max
] and N refers to a number of segmen-
tations in an ensemble. In practice |k| is typically
larger than N. It is obvious that the MDL method re-
quires the highest computation time, while the CBR
approach requires the least computation time. In all
experiments conducted in this work, |k| is equal to 49,
where [k
min
,k
max
] is [2, 50], and N is equal to 24.
The actual computation time (shown in parenthe-
sis) used to process one input image of each approach
implemented in MATLAB on an Intel Core i7, CPU
2.30GHz. The computation time reported in the ta-
ble are the average of computation times of 20 test
images. Experimental results show that the compu-
tation time of the CBR based on MDL quality mea-
sure is substantially less than that of MDL approach
SegmentationEnsemble-AKnowledgeReuseforModelOrderSelectionusingCase-basedReasoning
293

and slightly less than the GM approach. More inter-
estingly, the computation time of the CBR based on
SNMI quality measure is substantially less than both
MDL and GM approaches and without the loss of seg-
mentation combination accuracy. We are very posi-
tive about the potential of our proposed approach be-
cause the only computational burden of our approach
is just one step for evaluating quality of segmentations
in an ensemble. If a more effective segmentation val-
idation method is available, we can not only greatly
reduce the overall computation time, but also improve
the accuracy of the combinationation results. Unlike
GM and MDL approaches that have a fix overhead of
computing a series of combination results.
5 CONCLUSIONS AND FUTURE
WORK
We proposed a new approach for automatically de-
termining the number of regions in a final segmen-
tation combination result. We presented a novel use
of cluster ensemble concept to handle this difficult
problem. We first studied the correlation between a
segmentation ensemble and k
∗
of an image. The in-
formation about k
∗
is then extracted from an ensem-
ble and used as a knowledge domain for building a
case base. We represented the extracted knowledge
in terms of the number of regions of segmentations
in an ensemble and the qualities of them. The con-
cepts of NMI and MDL are used to evaluate the qual-
ity of ensemble members. By utilizing this informa-
tion, our case-based reasoning is able to settle the true
number of regions in the final segmentation combi-
nation result as good as the more sophiticated meth-
ods. Even though our CBR approach does not show
any significant improvement over the existing meth-
ods, it does show the significant reduction of compu-
tational time without the loss of segmentation com-
bination accuracy. This contribution would make the
segmentation ensemble concept more feasible in real-
world applications. However, the results of our CBR
approach presented in this paper are one of our first
attempts. There is room for improvement, actually, in
most steps of our approach. More effective and so-
phisticated methods should be very useful to improve
the performance of the proposed approach. It is also
interesting to apply our approach in different domains
or in a general data cluster ensemble application.
REFERENCES
Comaniciu, D. and Meer, P. (2002). Mean shift: A robust
approach toward feature space analysis. IEEE Trans.
Patt. Anal. Mach. Intel., 24:603–619.
Deng, Y. and Manjunath, B. (2001). Unsupervised segmen-
tation of color-texture regions in images and video.
IEEE Trans. Patt. Anal. Mach. Intel., 23(8):800–810.
Dubes, R. C. (1993). Cluster analysis and related issues.
Handbook of Pattern Recognition & Computer Vision,
pages 3–32.
Felzenszwalb, P. and Huttenlocher, D. (2004). Efficient
graph-based image segmentation. International Jour-
nal of Computer Vision, 59(2):167–181.
Fischer, B. and Buhmann, J. (2003). Bagging for path-
based clustering. IEEE Trans. Patt. Anal. Mach. Intel.,
25(11):14111415.
Fowlkes, C., Martin, D., and Malik, J. (2003). Learning
affinity functions for image segmentation: Combining
patch-based and gradient-based approaches. In CVPR,
volume 2, pages 54–61.
Franek, L., Jiang, X., and Wattuya, P. (2012). Local in-
stability problem of image segmentation algorithms:
Systematic study and an ensemble-based solution.
IJPRAI, 26(5).
Fred, A. L. N. and Jain, A. K. (2005). Combining multiple
clusterings using evidence accumulation. IEEE Trans.
Patt. Anal. Mach. Intel., 27(6):835–850.
Frucci, M., Perner, P., and Sanniti, G. (2008). Case-based
reasoning for image segmentation. IJPRAI, 22:1–14.
Grimnes, M. and Aamodt, A. (1996). A two layer case-
based reasoning architecture for medical image un-
derstanding. In European Workshop on Advances in
Case-Based Reasoning, pages 164–178.
Halkidi, M., Batistakis, Y., and Vazirgiannis, M. (2001). On
clustering validation techniques. Journal of Intelligent
Information Systems, 17:107–145.
Haralick, R. M., Shanmugam, K., and Dinstein, I. (1973).
Textural features for image classification. IEEE Trans.
Syst, Man, and Cyber, 3(11):610–630.
Hardy, A. (1996). On the number of clusters. Computa-
tional Statistics and Data Analysis, 23:83–96.
Jiang, Y. and Zhou, Z.-H. (2004). Som ensemble-based im-
age segmentation. 20(3):171–178.
Kolodner, J. (1993). Case-Based Reasoning. Morgan Kauf-
mann, San Mateo, CA.
Leake, D. (1996). Case-Based Reasoning: Experiences,
Lessons, and Future Directions. AAAI Press, CA.
Martin, D. R., Fowlkes, C., Tal, D., and Malik, J. (2001).
A database of human segmented natural images and
its application to evaluating segmentation algorithms
and measuring ecological statistics. In ICCV, pages
416–425.
Milligan, G. W. and Cooper, M. C. (1985). An examination
of procedures for determining the number of clusters
in a data set. Psychometrika, 50:159179.
Nguyen, N. and Caruana, R. (2007). Consensus clusterings.
In IEEE ICDM, pages 607 – 612.
Perner, P. (1999). An architecture for a cbr image segmen-
tation system. Journal on Engineering Applications in
Artificial Intelligence, 12(6):749–759.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
294

Perner, P., Guether, T., and Perner, H. (2003). Airborne
fungi identification by case-based reasoning. In Work-
shop on CBR in the Health Sciences.
Rabinovich, R., Belongie, S., Lange, T., and Buhmann,
J. M. (2006). Model order selection and cue combina-
tion for image segmentation. In CVPR, pages 1130–
1137.
Rao, S., Mobahi, H., Yang, A., Sastry, S., and Ma, Y.
(2009). Natural image segmentation with adaptive
texture and boundary encoding. In ACCV, pages 135–
146.
Rohlfing, T., Russakoff, D. B., and Jr., C. R. M.
(2004). Performance-based classifier combination
in atlas-based image segmentation using expectation-
maximization parameter estimation. IEEE Trans.
Med. Imaging, 23(8).
Strehl, A. and Ghosh, J. (2002). Cluster ensembles - a
knowledge reuse framework for combining multiple
partitions. Machine Learning Research, 3:583–617.
Topchy, A. P., Jain, A. K., and Punch, W. F. (2005). Clus-
tering ensembles: Models of consensus and weak
partitions. IEEE Trans. Patt. Anal. Mach. Intel.,
27(12):1866–1881.
Vega-pons, S. and Ruiz-shulcloper, J. (2011). A survey of
clustering ensemble algorithms. IJPRAI, 25(3):337–
372.
Wattuya, P., Jiang, X., Prassni, J., and Rothaus, K. (2008).
A random walker based approach to combining mul-
tiple segmentations. In ICPR, pages 1–4.
Wattuya, P., Soonthornphisaj, N., and Jiang, X. (2012). Us-
ing soft case-based reasoning in model order selection
for image segmentation ensemble. In JSAI.
SegmentationEnsemble-AKnowledgeReuseforModelOrderSelectionusingCase-basedReasoning
295
