
Adapting the Covariance Matrix in Evolution Strategies
Silja Meyer-Nieberg and Erik Kropat
Department of Computer Science, Universit
¨
at der Bundeswehr M
¨
unchen,
Werner-Heisenberg Weg 37, 85577 Neubiberg, Germany
Keywords:
Evolutionary Algorithms, Continuous Optimization, Evolution Strategies, Covariance, Shrinkage.
Abstract:
Evolution strategies belong to the best performing modern natural computing methods for continuous opti-
mization. This paper addresses the covariance matrix adaptation which is central to the algorithm. Nearly all
approaches so far consider the sample covariance as one of the main factors for the adaptation. However, as
known from modern statistics, this estimate may be of poor quality in many cases. Unfortunately, these cases
are encountered often in practical applications. This paper explores the use of different previously unexplored
estimates.
1 INTRODUCTION
Black-Box optimization is an important subcategory
of optimization. Over the years, several methods
have been developed - ranging from simple pattern
search over mesh adaptive methods to natural com-
puting, see e.g. (Audet, 2013; Conn et al., 2009;
Eiben and Smith, 2003). This paper focuses on evolu-
tion strategies (ESs) which represent well-performing
metaheuristics for continuous, non-linear optimiza-
tion. In recent workshops on black-box optimization,
see e.g. (Hansen et al., 2010), variants of this particu-
lar subtype of evolutionary algorithms have emerged
as one the best performing methods among a broad
range of competitors stemming from natural comput-
ing. Evolution strategies rely primarily on random
changes to move through the search space. These
random changes, usually normally distributed random
variables, must be controlled by adapting both, the ex-
tend and the direction of the movements.
Modern evolution strategies apply therefore co-
variance matrix and step-size adaptation – with great
success. However, most methods use the common
estimate of the population covariance matrix as one
component to guide the search. Here, there may be
room for further improvement, especially with re-
gard to common application cases of evolution strate-
gies which usually concern optimization in high-
dimensional search spaces. For efficiency reasons, the
population size λ, that is, the number of candidate so-
lutions, is kept below the search space dimensionality
N and scales usually with O(log(N)) or with O(N).
In other words, either λ N or λ ≈ N which may
represent a problem when using the sample covari-
ance matrix. This even more so, since the sample size
used in the estimation is just a fraction of the popula-
tion size. Furthermore, the result is not robust against
outliers which may appear in practical optimization
which has often to cope with noise. This paper in-
troduces and explores new approaches addressing the
first problem by developing a new estimate for the co-
variance matrix. To our knowledge, these estimators
have not been applied to evolution strategies before.
The paper is structured as follows: First, evolution
strategies are introduced and common ways to adapt
the covariance matrix are described and explained.
Afterwards, we point out a potential dangerous weak-
ness of the traditionally used estimate of the popula-
tion covariance. Candidates for better estimates are
presented and described in the following section. We
propose and investigate several approaches ranging
from a transfer of shrinkage estimators over a max-
imum entropy covariance selection principle to a new
combination of both approaches. The quality of the
resulting algorithms is assessed in the experimental
test section. Conclusions and possible further re-
search directions constitute the last part of the paper.
1.1 Evolution Strategies
Evolutionary algorithms (EAs) (Eiben and Smith,
2003) are population-based stochastic search and
optimization algorithms including today genetic al-
gorithms, genetic programming, (natural) evolution
strategies, evolutionary programming, and differen-
tial evolution. As a rule, they require only weak pre-
89
Meyer-Nieberg S. and Kropat E..
Adapting the Covariance Matrix in Evolution Strategies.
DOI: 10.5220/0004832300890099
In Proceedings of the 3rd International Conference on Operations Research and Enterprise Systems (ICORES-2014), pages 89-99
ISBN: 978-989-758-017-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

conditions on the function to be optimized. There-
fore, they are applicable in cases when only point-
wise function evaluations are possible.
An evolutionary algorithm starts with an initial
population of candidate solutions. The individuals are
either drawn randomly from the search space or are
initialized according to previous information on good
solutions. A subset of the parent population is cho-
sen for the creation of the offspring. This process is
termed parent selection. Creation normally consists
of recombination and mutation. While recombination
combines traits from two or more parents, mutation is
an unary operator and is realized by random perturba-
tions. After the offspring have been created, survivor
selection is performed to determine the next parent
population. Evolutionary algorithms differ in the rep-
resentation of the solutions and in the realization of
the selection, recombination, and mutation operators.
Evolution strategies (ESs) (Rechenberg, 1973;
Schwefel, 1981) are a variant of evolutionary algo-
rithms that is predominantly applied in continuous
search spaces. Evolution strategies are commonly no-
tated as (µ/ρ,λ)-ESs. The parameter µ stands for the
size of the parent population. In the case of recombi-
nation, ρ parents are chosen randomly and are com-
bined for the recombination result. While other forms
exist, recombination usually consists of determining
the weighted mean of the parents (Beyer and Schwe-
fel, 2002). The result is then mutated by adding a
normally distributed random variable with zero mean
and covariance matrix σ
2
C. While there are ESs that
operate without recombination, the mutation process
is essential and can be seen as the main search op-
erator. Afterwards, the individuals are evaluated us-
ing the function to be optimized or a derived function
which allows an easy ranking of the population. Only
the rank of an individual is important for the selection.
There are two main types of evolution strategies:
Evolution strategies with “plus”-selection and ESs
with “comma”-selection. The first select the µ-best
offspring and parents as the next parent population,
where ESs with “comma”-selection discard the old
parent population completely and take only the best
offspring. Figure 1 shows the general algorithm. The
symbol S
m
denotes the control parameters of the mu-
tation. Evolution strategies need to adapt the covari-
ance matrix for the mutation during the run. Evolu-
tion strategies with ill-adapted parameters converge
only slowly or may fail in the optimization. Methods
for adapting the scale factor σ or the full covariance
matrix have received a lot of attention (see (Meyer-
Nieberg and Beyer, 2007)). The main approaches are
described in the following section.
Algorithm:
A Generic Evolution Strategy
BEGIN
g:=0
initialize P
(0)
µ
:=
x
(0)
m
,S
(0)
m
,F(y
(0)
m
)
REPEAT
FOR l = 1, ... ,λ DO
P
ρ
:=reproduction(P
(g)
µ
)
S
l
:=derive(P
(g)
µ
)
x
0
l
:=recomb
x
(P
ρ
);
x
l
:=mutate
x
(x
0
l
,S
l
);
F
l
:= F(x
l
);
END
P
(g)
λ
:=
(x
l
,S
l
,F
l
)
CASE ‘‘,"-SELECTION:
P
(g+1)
µ
:=select(P
(g)
λ
)
CASE ‘‘+"-SELECTION:
P
(g+1)
µ
:=select(P
(g)
µ
,P
(g)
λ
)
g:=g+1
UNTIL stop;
END
Figure 1: A generic (µ/ρ
+
, λ)-ES (cf. (Beyer, 2001, p. 8)).
The notation is common in evolution strategies and denotes
a strategy with µ parents and λ offspring using either plus
or comma-selection. Recombination uses ρ parents for each
offspring.
1.2 Updating the Covariance Matrix
First, the update of the covariance matrix is ad-
dressed. In evolution strategies two types exist: one
applied in the covariance matrix adaptation evolution
strategy (CMA-ES) (Hansen and Ostermeier, 2001)
which considers past information from the search and
an alternative used by the covariance matrix self-
adaptation evolution strategy (CMSA-ES) (Beyer and
Sendhoff, 2008) which focusses more on the present
population.
The covariance matrix update of the CMA-ES is
explained first. The CMA-ES uses weighted interme-
diate recombination, in other words, it computes the
weighted centroid of the µ best individuals of the pop-
ulation. This mean m
(g)
is used for creating all off-
spring by adding a random vector drawn from a nor-
mal distribution with covariance matrix (σ
(g)
)
2
C
(g)
,
i.e., the actual covariance matrix consists of a general
scaling factor (or step-size or mutation strength) and
the matrix denoting the directions. Following usual
notation in evolution strategies this matrix C
(g)
will
be referred to as covariance matrix in the following.
The basis for the CMA update is the common esti-
mate of the covariance matrix using the newly created
population. Instead of considering the whole popula-
tion for deriving the estimates, though, it introduces a
bias towards good search regions by taking only the µ
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
90

best individuals into account. Furthermore, it does not
estimate the mean anew but uses the weighted mean
m
(g)
. Following (Hansen and Ostermeier, 2001),
y
(g+1)
m:λ
:=
1
σ
(g)
x
(g+1)
m:λ
−m
(g)
(1)
are determined with x
m:λ
denoting the mth best of the
λ particle according to the fitness ranking. The rank-µ
update the obtains the covariance matrix as
C
(g+1)
µ
:=
µ
∑
m=1
w
m
y
(g+1)
m:λ
(y
(g+1)
m:λ
)
T
(2)
To derive reliable estimates larger population sizes are
usually necessary which is detrimental with regard to
the algorithm’s speed. Therefore, past information,
that is, past covariance matrizes are usually also con-
sidered
C
(g+1)
:= (1 −c
µ
)C
(g)
+ c
µ
C
(g+1)
µ
(3)
with parameter 0 ≤ c
µ
≤ 1 determining the effective
time-horizon. In CMA-ESs, it has been found that an
enhance of the general search direction in the covari-
ance matrix is usual beneficial. For this, the concepts
of the evolutionary path and the rank-one-update are
introduced. As its name already suggests, an evolu-
tionary path considers the path in the search space
the population has taken so far. The weighted means
serve as representatives. Defining
v
(g+1)
:=
m
(g+1)
−m
(g)
σ
(g)
the evolutionary path reads
p
(g+1)
c
:= (1 −c
c
)p
(g)
c
+
p
c
c
(2 −c
c
)µ
eff
m
(g+1)
−m
(g)
σ
(g)
. (4)
For details on the parameters, see e.g. (Hansen,
2006). The evolutionary path gives a general search
direction that the ES has taken in the recent past. In
order to bias the covariance matrix accordingly, the
rank-one-update
C
(g+1)
1
:= p
(g+1)
c
(p
(g+1)
c
)
T
(5)
is performed and used as a further component of the
covariance matrix. A normal distribution with covari-
ance C
(g+1)
1
leads towards a one-dimensional distri-
bution on the line defined by p
(g+1)
c
. With (5) and (3),
the final covariance update of the CMA-ES reads
C
(g+1)
:= (1 −c
1
−c
µ
)C
(g)
+ c
1
C
(g+1)
1
+c
µ
C
(g+1)
µ
. (6)
The CMA-ES is one of the most powerful evolution
strategies. However, as pointed out in (Beyer and
Sendhoff, 2008), its scaling behavior with the pop-
ulation size is not good. The alternative approach of
the CMSA-ES (Beyer and Sendhoff, 2008) updates
the covariance matrix differently. Considering again
the definition (1), the covariance update is a convex
combination of the old covariance and the population
covariance, i.e., the rank-µ update
C
(g+1)
:= (1 −
1
c
τ
)C
(g)
+
1
c
τ
µ
∑
m=1
w
m
y
(g+1)
m:λ
(y
(g+1)
m:λ
)
T
(7)
with the weights usually set to w
m
= 1/µ. See (Beyer
and Sendhoff, 2008) for information on the free pa-
rameter c
τ
.
1.3 Step-size Adaptation
The CMA-ES uses the so-called cumulative step-
size adaptation (CSA) to control the scaling param-
eter (also called step-size, mutation strength or step-
length) (Hansen, 2006). To this end, the CSA deter-
mines again an evolutionary path by summating the
movement of the population centers
p
(g+1)
σ
= (1 −c
σ
)p
(g)
σ
+
p
c
σ
(2 −c
σ
)µ
eff
(C
(g)
)
−
1
2
×
m
(g+1)
−m
(g)
σ
(g)
(8)
eliminating the influence of the covariance matrix and
the step length. For a detailed description of the pa-
rameters, see (Hansen, 2006). The length of the path
in (8) is important. In the case of short path lengths,
several movement of the centers counteract each other
which is an indication that the step-size is too large
and should be reduced. If on the other hand, the ES
takes several consecutive steps in approximately the
same direction, progress and algorithm speed would
be improved, if larger changes were possible. Long
path lengths, therefore, are an indicator for a required
increase of the step length. Ideally, the CSA should
result in uncorrelated steps.
After some calculations, see (Hansen, 2006), the
ideal situation is revealed as standard normally dis-
tributed steps, which leads to
ln(σ
(g+1)
) = ln(σ
(g)
) +
c
σ
d
σ
kp
(g+1)
σ
k−µ
χ
n
µ
χ
n
(9)
as the CSA-rule. The change is multiplicative in or-
der to avoid numerical problems and results in non-
negative scaling parameters. The parameter µ
χ
n
in (9)
AdaptingtheCovarianceMatrixinEvolutionStrategies
91

stands for the mean of the χ-distribution with n de-
grees of freedom. If a random variable follows a χ
2
n
distribution, its square root is χ-distributed. The de-
grees of freedom coincide with the search space di-
mension. The CSA-rule works well in many applica-
tion cases. It can be shown, however, that the orig-
inal CSA encounter problems in large noise regimes
resulting in a loss of step-size control and premature
convergence. Therefore, uncertainty handling proce-
dures and other safeguards are advisable.
An alternative approach for adapting the step-size
is self-adaptation first introduced in (Rechenberg,
1973) and developed further in (Schwefel, 1981). It
subjects the strategy parameters of the mutation to
evolution. In other words, the scaling parameter or
in its full form, the whole covariance matrix, under-
goes recombination, mutation, and indirect selection
processes. The working principle is based on an indi-
rect stochastic linkage between good individuals and
appropriate parameters: On average good parameters
should lead to better offspring than too large or too
small values or misleading directions. Although self-
adaptation has been developed to adapt the whole co-
variance matrix, it is used nowadays mainly to adapt
the step-size or a diagonal covariance matrix. In the
case of the mutation strength, usually a log-normal
distribution
σ
(g)
l
= σ
base
exp(τN (0,1)) (10)
is used for mutation. The parameter τ is called the
learning rate and is usually chosen to scale with
1/
√
2N. The variable σ
base
is either the parental scale
factor or the result of recombination. For the step-
size, it is possible to apply the same type of recombi-
nation as for the positions although different forms –
for instance a multiplicative combination – could be
used instead. The self-adaptation of the step-size is
referred to as σ-self-adaptation (σSA) in the remain-
der of this paper.
The newly created mutation strength is then di-
rectly used in the mutation of the offspring. If the re-
sulting offspring is sufficiently good, the scale factor
is passed to the next generation. The baseline σ
base
is either the mutation strength of the parent or if re-
combination is used the recombination result. Self-
adaptation with recombination has been shown to be
“robust” against noise (Beyer and Meyer-Nieberg,
2006) and is used in the CMSA-ES as update rule
for the scaling factor. In (Beyer and Sendhoff, 2008)
it was found that the CMSA-ES performs compara-
bly to the CMA-ES for smaller populations but is less
computational expensive for larger population sizes.
2 WHY THE COVARIANCE
ESTIMATOR SHOULD BE
CHANGED
The covariance matrix C
µ
which appears in (2) and
(7) can be interpreted as the sample covariance ma-
trix with sample size µ. Two differences are present.
The first using µ instead of µ −1 can be explained by
using the known mean instead of an estimate. The
second lies in the non-identically distributed random
variables of the population since order statistics ap-
pear. We will disregard that problem for the time be-
ing.
In the case of identically independently distributed
random variables, the estimate converges almost
surely towards the “true” covariance Σ for µ → ∞. In
addition, the sample covariance matrix is related (in
our case equal) to the maximum likelihood (ML) esti-
mator of Σ. Both facts serve a justification to take C
µ
as the substitute for the unknown true covariance for
large µ. However, the quality of the estimate can be
quite poor if µ < N or even µ ≈ N.
This was first discovered by Stein (Stein, 1956;
Stein, 1975). Stein’s phenomenon states that while
the ML estimate is often seen as the best possi-
ble guess, its quality may be poor and can be im-
proved in many cases. This holds especially for
high-dimensional spaces. The same problem transfers
to covariance matrix estimation, see (Sch
¨
affer and
Strimmer, 2005). Also recognized by Stein, in case
of small ratios µ/N the eigenstructure of C
µ
may not
agree well with the true eigenstructure of Σ. As stated
in (Ledoit and Wolf, 2004), the largest eigenvalue
has a tendency towards too large values, whereas the
smallest shows the opposite behavior. This results
in a larger spectrum of the sample covariance matrix
with respect to the true covariance for N/µ 6→ 0 for
µ,N → ∞ (Bai and Silverstein, 1998). As found by
Huber (Huber, 1981), a heavy tail distribution leads
also to a distortion of the sample covariance.
In statistics, considerable efforts have been made
to find more reliable and robust estimates. Owing to
the great inportance of the covariance matrix in data
mining and other statistical analyses, work is still on-
going. The following section provides a short intro-
duction before focussing on the approach used for
evolution strategies.
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
92
3 ESTIMATING THE
COVARIANCE
As stated above, the estimation of high-dimensional
covariance matrices has received a lot of attention,
see e.g. (Chen et al., 2012). Several types have been
introduced, for example: shrinkage estimators, band-
ing and tapering estimators, sparse matrix transform
estimators, and the graphical Lasso estimator. This
paper concentrates on shrinkage estimators and on an
idea inspired by a maximum entropy approach. Both
classes can be computed comparatively efficiently.
Future research will consider other classes of estima-
tors.
3.1 Shrinkage Estimators
Most (linear) shrinkage estimators use the convex
combination
S
est
(ρ) = ρF + (1 −ρ)C
µ
(11)
with F the target to correct the estimate provided by
the sample covariance. The parameter ρ ∈]0,1[ is
called the shrinkage intensity. Equation (11) is used
to shrink the eigenvalues of C
µ
towards the eigenval-
ues of F. The shrinkage intensity ρ should be chosen
to minimize
E
kS
est
(ρ) −Σk
2
F
(12)
with k·k
2
F
denoting the squared Frobenius norm with
kAk
2
F
=
1
N
Tr
h
AA
T
i
, (13)
see (Ledoit and Wolf, 2004). To solve this problem,
knowledge of the true covariance Σ would be required
which is unobtainable in most cases.
Starting from (12), Ledoit and Wolf obtained an
analytical expression for the optimal shrinkage inten-
sity for the target F = Tr(C
µ
)/N I. The result does
not make assumptions on the underlying distribution.
In the case of µ ≈ N or vastly different eigenvalues,
the shrinkage estimator does not differ much from the
sample covariance matrix, however.
Other authors introduced different estimators, see
e.g. (Chen et al., 2010) or (Chen et al., 2012)). Ledoit
and Wolfe themselves considered non-linear shrink-
age estimators (Ledoit and Wolf, 2012). Most of the
approaches require larger computational efforts. In
the case of the non-linear shrinkage, for example, the
authors are faced with a non-linear, non-convex opti-
mization problem, which they solve by using sequen-
tial linear programming (Ledoit and Wolf, 2012). A
general analytical expression is unobtainable, how-
ever.
Shrinkage estimators and other estimators aside
from the standard case have not been used in in evo-
lution strategies before. A literature review resulted
in one application in the case of Gaussian based es-
timation of distribution algorithms albeit with quite a
different goal (Dong and Yao, 2007). There, the learn-
ing of the covariance matrix during the run lead to
non positive definite matrices. A shrinkage procedure
was applied to “repair” the covariance matrix towards
the required structure. The authors used a similar ap-
proach as in (Ledoit and Wolf, 2004) but made the
shrinkage intensity adaptable.
Interestingly, (3), (6), and (7) of the ES algorithm
can be interpreted as a special case of shrinkage. In
the case of the CMSA-ES, for example, the estimate is
shrunk towards the old covariance matrix. The shrink-
age intensity is determined by
c
τ
= 1 +
N(N + 1)
2µ
(14)
as ρ = 1 −1/c
τ
. As long as the increase of µ with
the dimensionality N is below O(N
2
), the coefficient
(14) approaches infinity for N → ∞. Since the contri-
bution of the sample covariance to the new covariance
in (7) is weighted with 1/c
τ
, its influence fades out for
increasing dimensions. It is the aim of the paper to in-
vestigate whether a further shrinkage can improve the
result.
Our first experiments were concerned with trans-
ferring shrinkage estimators to ESs. The situation in
which the estimation takes place in the case of evolu-
tion strategies differs from the assumptions in litera-
ture. The covariance matrix Σ = C
g−1
that was used to
create the offspring is known. This would enable the
use of oracle estimators normally used to start the cal-
culations deriving the estimates. However, since the
sample is based on rank-based selection, the covari-
ance matrix of the sample will differ to some extend.
Neglecting the selection pressure in a first approach,
the sample x
1
,...,x
µ
would represent normally dis-
tributed random variables. For this scenario, the sam-
ple covariance matrix C
µ
would be shrunk towards the
shrinkage target F by choosing ρ as the minimizer of
(12).
Since most shrinkage approaches consider diago-
nal matrices as shrinkage targets, we choose the ma-
trix F = diag(C
µ
), that is, the diagonal elements of the
sample covariance matrix are unchanged and only the
off-diagonal entries are decreased. Following (Fisher
and Sun, 2011), the optimal intensity of the oracle
reads
ρ = 1 −
α
2
D
+ γ
2
S
δ
2
D
(15)
AdaptingtheCovarianceMatrixinEvolutionStrategies
93

with
α
2
D
=
1
µN
Tr(ΣΣ
T
) + Tr(Σ)
2
, (16)
γ
2
D
= −
2
µN
Tr
diag(Σ)
2
, (17)
and
δ
2
D
=
1
µN
(µ + 1)Tr(ΣΣ
T
) + Tr(Σ)
2
−(µ + 2)Tr(diag(Σ)
2
)
. (18)
A first approach for evolution strategies would be to
apply the shrinkage above, starting with the “ideal”
shrinkage intensity and to use then the shrinkage re-
sult as the new population covariance in the rank-
µ update. However, a shrinkage towards a diagonal
does not appear to be a good idea for optimizing func-
tions that are not oriented towards the coordinate sys-
tem. Experiments with ESs validated this assumption.
3.2 A Maximum Entropy Covariance
Estimation
Therefore, we make use of another concept following
(Thomaz et al., 2004). Confronted with the problem
of determining a reliable covariance matrix by com-
bining a sample covariance matrix with a pooled vari-
ance matrix, the authors introduced a maximum en-
tropy covariance selection principle. Since a combi-
nation of covariance matrices also appears in evolu-
tion strategies, a closer look at their approach is in-
teresting. Defining a population matrix C
p
and the
sample covariance matrix S
i
, the mixture
S
mix
(η) = ηC
p
+ (1 −η)S
i
(19)
was considered. In departure from usual approaches,
focus lay on the combination of the two matrixes that
maximizes the entropy. To this end, the coordinate
system was changed to the eigenspace of S
mix
(1). Let
M
S
denote the (normalized) eigenvectors of the mix-
ture matrix. The representations of C
p
and S
i
in this
coordination system read
Φ
C
= M
T
S
C
p
M
S
Φ
S
= M
T
S
S
i
M
S
. (20)
Both matrices are usually not diagonal. To construct
the new estimate for the covariance matrix,
Λ
C
= diag(Φ
C
)
Λ
S
= diag(Φ
S
) (21)
were determined. By taking λ
i
= max(λ
C
i
,λ
S
i
), a co-
variance matrix estimate could finally be constructed
via M
S
ΛM
T
S
. The approach maximizes the possible
contributions to the principal direction of the mixture
matrix and is based on a maximum entropy derivation
for the estimation.
3.3 New Covariance Estimators
This paper proposes a combination of a shrinkage
estimator and the basis transformation introduced
(Thomaz et al., 2004) for a use in evolution strategies.
The aim is to switch towards a suitable coordinate sys-
tem and then either to discard the contributions of the
sample covariance that are not properly aligned or to
shrink the off-diagonal components. Two choices for
the mixture matrix represent themselves. The first
S
mix
= C
g
+ C
µ
(22)
is be chosen in accordance to (Thomaz et al., 2004).
The second takes the covariance result that would
have been used in the original CMSA-ES
S
mix
= (1 −c
τ
)C
g
+ c
τ
C
µ
(23)
and is considered even more appropriate for very
small samples. Both choices will be investigated in
this paper. They in turn can be coupled with sev-
eral further ways to proceed. Switching towards
the eigenspace of S
mix
, results in the covariance
matrix representations Φ
µ
:= M
T
S
C
µ
M
S
and Φ
Σ
:=
M
T
S
C
g
M
S
. The first approach for constructing a new
estimate of the sample covariance is to apply the
principle of maximal contribution to the axes from
(Thomaz et al., 2004) and to determine
Λ
µ
= max
diag(Φ
µ
),diag(Φ
Σ
)
. (24)
The sample covariance matrix can then be computed
as C
0
µ
= M
S
Λ
µ
M
T
S
. Another approach would be to
discard all entries of Φ
µ
except the diagonal
Λ
µ
= diag(Φ
µ
). (25)
A third approach consists of applying a shrinkage es-
timator like
Φ
S
µ
= (1 −ρ)Φ
µ
+ ρdiag(Φ
µ
) (26)
with ρ for example determined by (15) with Σ =
M
T
S
C
g
M
S
. This approach does not discard the off-
diagonal entries completely. The shrinkage intensity
ρ remains to be determined. First experiments will
start with (15).
4 EXPERIMENTS
This section describes the experiments that were per-
formed to explore the new approaches. For our inves-
tigation, the CMSA-ES version is considered since
it operates just with the population covariance ma-
trix and effects from changing the estimate should be
easier to discerned. The competitors consist of al-
gorithms which use shrinkage estimators as defined
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
94
in (22) to (26). This code is not optimized for per-
formance with respect to absolute computing time,
since this paper aims at a proof of concept. The
experiments are performed for the search space di-
mensions N = 2, 5, 10, and 20. The maximal num-
ber of fitness evaluations is FE
max
= 2 ×10
4
N. The
CMSA-ES versions use λ = blog(3N) + 8c offspring
and µ = dλ/4e parents. The start position of the al-
gorithms is randomly chosen from a normal distribu-
tion with mean zero and standard deviation of 0.5. A
run terminates prematurely if the difference between
the best value obtained so far and the optimal fitness
value |f
best
− f
opt
| is below a predefined precision set
to 10
−8
. For each fitness function and dimension, 15
runs are used.
4.1 Test Suite
The experiments are performed with the black box
optimization benchmarking (BBOB) software frame-
work and the test suite introduced for the black box
optimization workshops, see (Hansen et al., 2012).
The aim of the workshop is to benchmark and com-
pare metaheuristics and other direct search methods
for continuous optimization. The framework allows
the plug-in of algorithms adhering to a common in-
terface and provides a comfortable way of generating
the results in form of tables and figures.
The test suite contains noisy and noise-less func-
tions with the position of the optimum changing ran-
domly from run to run. This paper focuses on the 24
noise-less functions (Finck et al., 2010). They can be
divided into four classes: separable functions (func-
tion ids 1-5), functions with low/moderate condition-
ing (ids 6-9), functions with high conditioning (ids
10-14), and two groups of multimodal functions (ids
15-24). Among the unimodal functions with only one
optimal point, there are separable functions which are
given as
f (x) =
N
∑
i=1
f
i
(x
i
) (27)
and can therefore be solved by optimizing each com-
ponent separately. The simplest member of this class
is the (quadratic) sphere with f (x) = kxk
2
. Other
functions include ill-conditioned functions, like for
instance the elliposoidal function, and multimodal
functions (Rastrigin) which represent particular chal-
lenges for the optimization (Table 1).
4.2 Performance Measure
The following performance measure is used in accor-
dance to (Hansen et al., 2012). The expected run-
Table 1: Some of the test functions used for the comparison
of the algorithms. The variable z denotes a transformation
of x in order to keep the algorithm from exploiting certain
particularities of the function, see (Finck et al., 2010).
Sphere f (x) = kzk
2
Rosenbrock f (x) =
∑
N−1
i=1
200(z
2
i
−z
i+1
)
2
+ (z
i
−1)
2
Ellipsoidal f (x) =
∑
N
i=1
10
6
i−1
N−1
z
2
i
Discus f (x) = 10
6
z
2
1
+
∑
N
i=2
z
2
i
Rastrigin f (x) = 10
N −
∑
N
i=1
cos(2πz
i
)
+ kzk
2
5-D 20-D
f
1
–f
24
in 5-D, maxFE/D=20000
#FEs/D best 10% 25% med 75% 90%
2 0.31 0.97 1.6 2.6 3.9 8.5
10 1.3 1.5 2.0 3.1 4.3 14
100 1.6 2.3 5.3 7.7 16 47
1e3 2.8 7.3 17 49 79 2.7e2
1e4 2.8 6.0 14 66 1.4e2 7.1e2
1e5 2.8 6.0 14 93 5.6e2 2.7e3
RL
US
/D 2e4 2e4 2e4 2e4 2e4 2e4
f
1
–f
24
in 20-D, maxFE/D=20000
#FEs/D best 10% 25% med 75% 90%
2 0.39 0.68 1.4 2.4 13 40
10 0.49 0.86 1.5 2.8 5.1 27
100 1.2 2.3 3.0 5.1 22 59
1e3 6.3 11 14 25 56 2.2e2
1e4 5.9 12 34 81 4.1e2 8.1e2
1e5 5.9 12 42 2.9e2 7.8e2 6.7e3
RL
US
/D 2e4 2e4 2e4 2e4 2e4 2e4
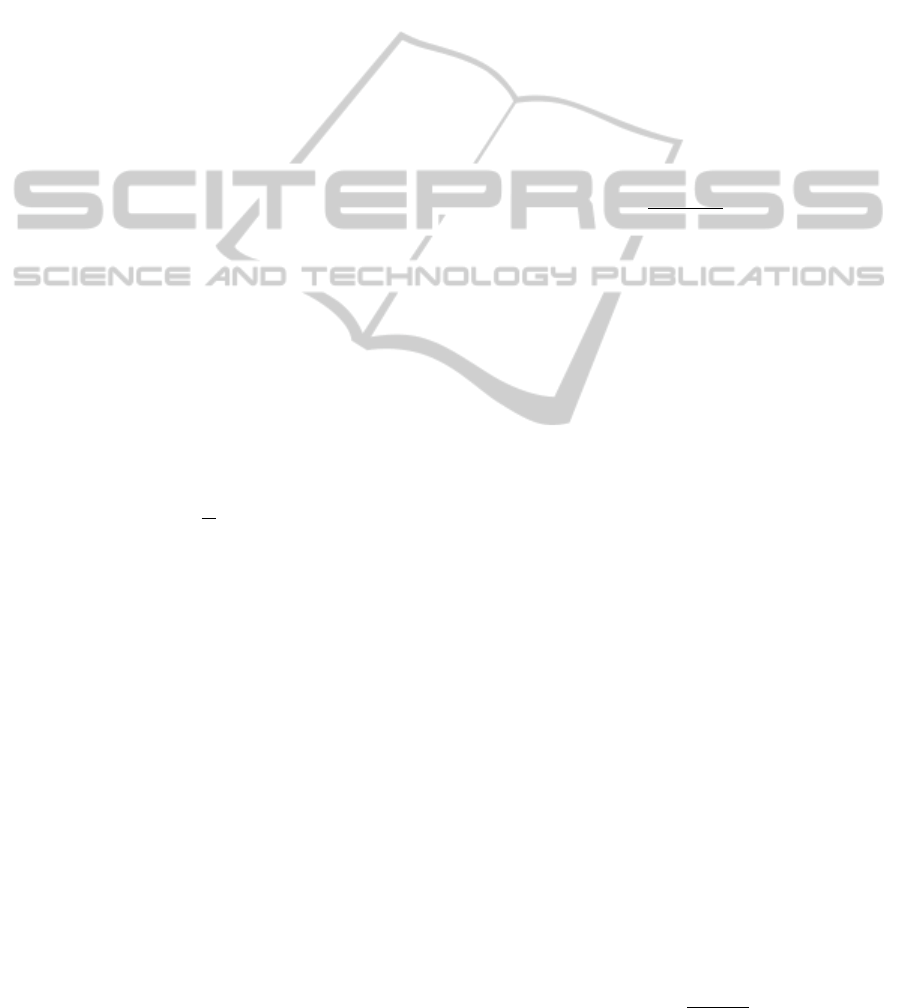
Figure 2: The CMSA-shr-ES. ERT loss ratio (in number
of f -evaluations divided by dimension) divided by the best
ERT seen in GECCO-BBOB-2009 for the target f
t
, or, if
the best algorithm reached a better target within the budget,
the budget divided by the best ERT. Line: geometric mean.
Box-Whisker error bar: 25-75%-ile with median (box), 10-
90%-ile (caps), and minimum and maximum ERT loss ra-
tio (points). The vertical line gives the maximal number of
function evaluations in a single trial in this function subset.
ning time (ERT) gives the expected value of the func-
tion evaluations ( f -evaluations) the algorithm needs
to reach the target value with the required precision
for the first time, see (Hansen et al., 2012). In this
paper, we use
ERT =
#(FEs( f
best
≥ f
target
))
#succ
(28)
as an estimate by summing up the fitness evaluations
FEs( f
best
≥ f
target
) of each run until the fitness of the
best individual is smaller than the target value, di-
vided by all successfull runs.
AdaptingtheCovarianceMatrixinEvolutionStrategies
95
5-D 20-D
f
1
–f
24
in 5-D, maxFE/D=20000
#FEs/D best 10% 25% med 75% 90%
2 0.33 0.78 1.6 2.5 3.9 7.1
10 1.1 1.5 2.0 2.8 4.6 18
100 1.5 2.5 4.3 6.8 15 57
1e3 2.7 6.9 15 34 75 5.7e2
1e4 2.7 8.0 12 84 4.7e2 7.1e2
1e5 2.7 8.0 12 68 5.9e2 1.2e3
RL
US
/D 2e4 2e4 2e4 2e4 2e4 2e4
f
1
–f
24
in 20-D, maxFE/D=20000
#FEs/D best 10% 25% med 75% 90%
2 0.23 0.73 1.6 2.3 13 40
10 0.45 0.75 1.4 2.8 4.6 27
100 1.9 2.4 3.9 8.1 21 59
1e3 6.3 7.2 15 35 81 2.4e2
1e4 5.1 12 40 1.5e2 5.0e2 8.1e2
1e5 5.1 12 52 3.8e2 8.6e2 6.7e3
RL
US
/D 2e4 2e4 2e4 2e4 2e4 2e4
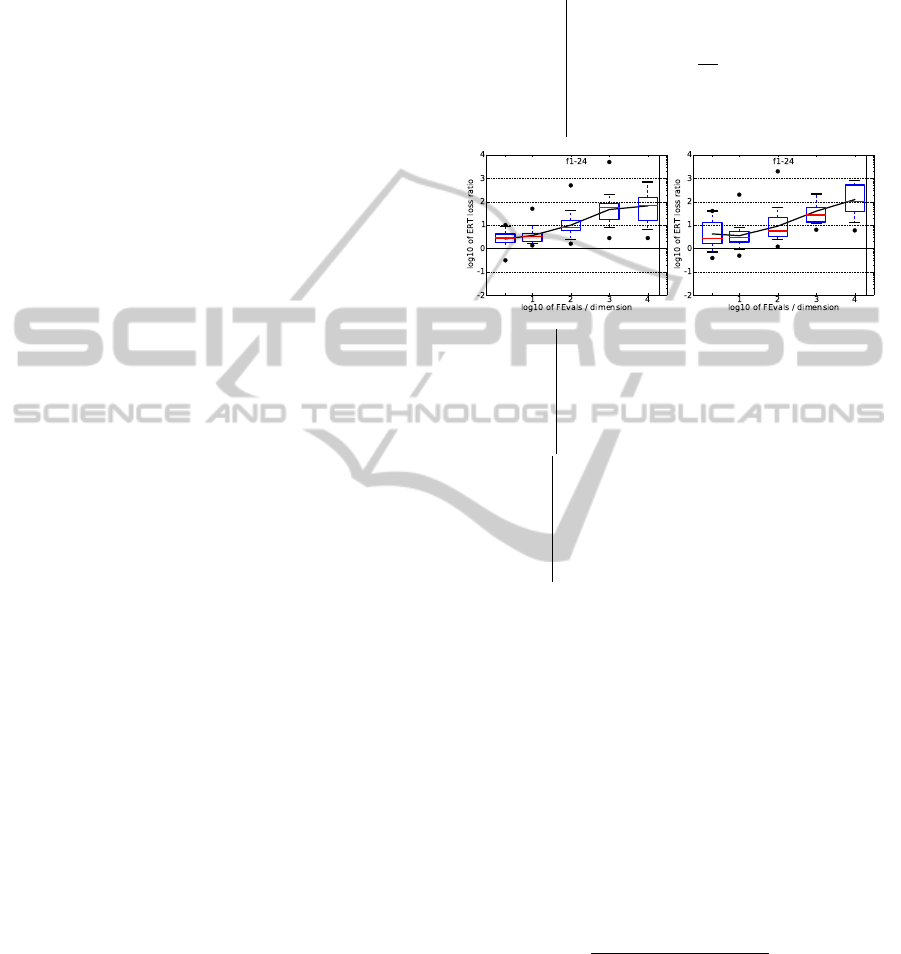
Figure 3: The CMSA-ES. ERT loss ratio (in number of
f -evaluations divided by dimension) divided by the best
ERT seen in GECCO-BBOB-2009 for the target f
t
, or, if
the best algorithm reached a better target within the budget,
the budget divided by the best ERT. Line: geometric mean.
Box-Whisker error bar: 25-75%-ile with median (box), 10-
90%-ile (caps), and minimum and maximum ERT loss ra-
tio (points). The vertical line gives the maximal number of
function evaluations in a single trial in this function subset.
4.3 Results and Discussion
Due to space restrictions, Figure 4 and Tables 2-3
show only the results from the best experiments which
were achieved for the variant which used (26) together
with (23) as the transformation matrix (called CMSA-
shr-ES in the following). First of all, it should be
noted that there is no significant advantage to either
algorithm for the test suite functions. Tables 2 and 3
show the ERT loss ratio with respect to the best re-
sult from the BBOB 2009 workshop for predefined
budgets given in the first column. The median per-
formance of both algorithms improves with the di-
mension until the budget of 10
3
– which is interest-
ing. An increase of the budget goes along with a de-
creased performance which is less pronounced for the
CMSA-shr-ES in the case of the larger dimensional
space. This indicates that the CMSA-shr-ES may per-
form more favorable in larger search spaces as envi-
sioned. Further experiments which a larger maximal
number of fitness evaluations and larger dimensional
spaces will be conducted which should shed more
light on the behavior. Furthermore, the decrease in
performance with the budget hints at a search stagna-
tion probably due to convergence into local optima.
Restart strategies may be beneficial, but since they
have to be fitted to the algorithms, we do not apply
them in the present paper.
Figure 4 shows the expected running time for
reaching the precision of 10
−8
for all 24 functions and
search space dimensionalities. In the case of the sep-
arable functions (1-5), both algorithms show a very
similar behavior, succeeding in optimizing the first
two functions and exhibiting difficulties in the case
of the difficult rastrigin variants. On the linear slope,
the original CMSA-ES shows fewer expected func-
tion evaluations for smaller dimensions which starts
to change when the dimensionality is increased. For
the functions with ids 6-9, with moderate condition
numbers, there are advantages to the CMSA-shr-ES,
with the exception of the rotated rosenbrock (9). Most
of the functions with high conditioning, ids 10-12,
and 14, can be solved by both variants with slightly
better results for the CMSA-ES. The sharp ridge (id
13) appears as problematic, with the CMSA-shr-ES
showing fewer fitness evaluations for hitting the vari-
ous precisions goals in Table 2.
Interestingly, the CMSA-shr variant seems to per-
form better for the difficult multimodal functions,
e.g., Gallaghers 101 peak function, a finding which
should be explored in more detail. The results for
the last two multimodal functions can be explained
in part in that the computing resources were insuffi-
cient for the optimization. Even the best performing
algorithms from the BBOB workshop needed more
resources than we used in our experiments.
Further experiments will be conducted in order to
shed more light on the behavior. Special attention will
be given to the choice of the shrinkage factor, since
(15) is unlikely to be optimal and may have influ-
enced the outcome strongly. Furthermore, the ques-
tion remains whether the population size should be
increased for the self-adaptation process. Also, larger
search space dimensionalities than N = 20 are of in-
terest.
5 CONCLUSIONS
Evolution strategies are well performing variants of
evolutionary algorithms used in continuous optimiza-
tion. They ultilize normally distributed mutations as
their main search procedure. Their performance de-
pends on the control of the mutation process which is
governed by adapting step-sizes and covariance ma-
trices. One possible improvement concerns the co-
variance matrix adaptation which makes use of the
sample covariance matrix. In statistical research, this
estimate has been identified as not agreeing well with
the true covariance for the case of large dimensional
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
96
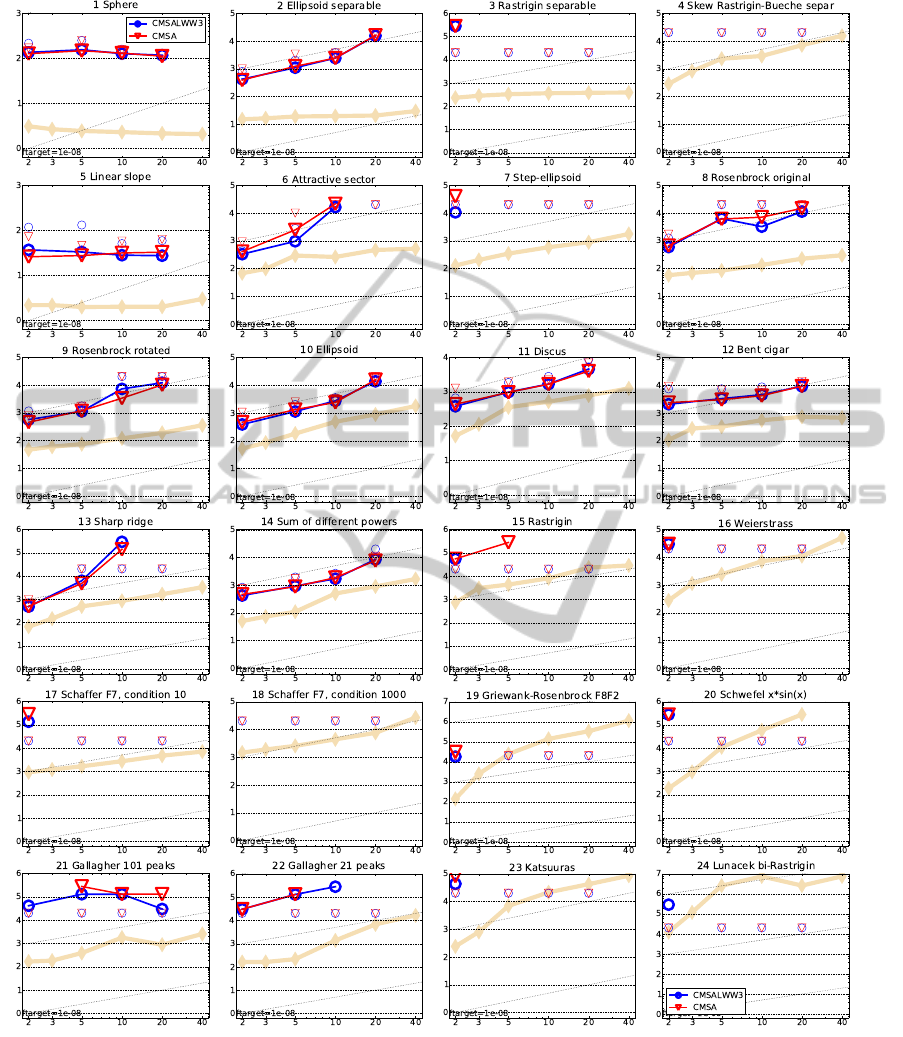
Figure 4: Expected running time (ERT in number of f -evaluations) divided by dimension for target function value 10
−8
as
log
10
values versus dimension. Different symbols correspond to different algorithms given in the legend of f
1
and f
24
. Light
symbols give the maximum number of function evaluations from the longest trial divided by dimension. Horizontal lines give
linear scaling, slanted dotted lines give quadratic scaling. Black stars indicate statistically better result compared to all other
algorithms with p < 0.01 and Bonferroni correction number of dimensions (six). Legend: .
spaces and small sample sizes, or more correctly for
sample sizes that do not increase sufficiently fast with
the dimensionality.
While modern approaches for covariance matrix
adaptation correct the estimate, the question arises
whether the performance of these evolutionary algo-
AdaptingtheCovarianceMatrixinEvolutionStrategies
97

Table 2: ERT in number of function evaluations divided by the best ERT measured during BBOB-2009 given in the respective
first row with the central 80% range divided by two in brackets for different ∆ f values. #succ is the number of trials that
reached the final target f
opt
+ 10
−8
. 1:CMSA-S is CMSA-shr-ES and 2:CMSA is CMSA-ES. Bold entries are statistically
significantly better compared to the other algorithm, with p = 0.05 or p = 10
−k
where k ∈{2,3,4, ... }is the number following
the ? symbol, with Bonferroni correction of 48. A ↓ indicates the same tested against the best BBOB-2009.
5-D 20-D
∆ f 1e+1 1e-1 1e-3 1e-5 1e-7 #succ
f
1
11 12 12 12 12 15/15
1: CMSA-S 2.4(2) 12(4) 25(6) 38(8) 53(8) 15/15
2: CMSA 2.4(2) 12(4) 26(7) 40(8) 54(15) 15/15
f
2
83 88 90 92 94 15/15
1: CMSA-S 26(21) 44(24) 53(30) 56(30) 57(29) 15/15
2: CMSA 19(15) 47(19) 54(23) 60(23) 63(30) 15/15
f
3
716 1637 1646 1650 1654 15/15
1: CMSA-S 22(70) ∞ ∞ ∞ ∞1.0e5 0/15
2: CMSA 94(140) ∞ ∞ ∞ ∞1.0e5 0/15
f
4
809 1688 1817 1886 1903 15/15
1: CMSA-S 46(62) ∞ ∞ ∞ ∞1.0e5 0/15
2: CMSA 186(247) ∞ ∞ ∞ ∞1.0e5 0/15
f
5
10 10 10 10 10 15/15
1: CMSA-S 8.6(3) 16(6) 17(6) 17(6) 17(6) 15/15
2: CMSA 8.2(3) 13(6) 14(6) 14(6) 14(6) 15/15
f
6
114 281 580 1038 1332 15/15
1: CMSA-S 2.0(1.0) 2.6(1.0) 3.2(3) 2.5(1) 3.2(3) 15/15
2: CMSA 1.6(0.9) 2.2(0.9) 3.2(3) 3.7(3) 5.8(4) 15/15
f
7
24 1171 1572 1572 1597 15/15
1: CMSA-S 57(5) 1217(1281) ∞ ∞ ∞1.0e5 0/15
2: CMSA 123(3) ∞ ∞ ∞ ∞1.0e5 0/15
f
8
73 336 391 410 422 15/15
1: CMSA-S 2.6(1) 88(152) 79(133) 76(125) 75(122) 12/15
2: CMSA 3.0(1) 85(151) 77(131) 74(124) 72(122) 12/15
f
9
35 214 300 335 369 15/15
1: CMSA-S 2.7(2) 15(9) 15(8) 15(7) 15(7) 15/15
2: CMSA 2.9(1) 17(9) 16(7) 16(7) 15(7) 15/15
f
10
349 574 626 829 880 15/15
1: CMSA-S 6.7(6) 6.7(5) 7.6(5) 6.3(4) 6.3(3) 15/15
2: CMSA 7.2(4) 7.4(5) 8.3(5) 7.3(5) 7.4(4) 15/15
f
11
143 763 1177 1467 1673 15/15
1: CMSA-S 8.8(8) 4.7(2) 3.5(2) 3.1(1) 2.9(1) 15/15
2: CMSA 7.3(6) 4.0(3) 3.3(2) 3.0(2) 2.8(1) 15/15
f
12
108 371 461 1303 1494 15/15
1: CMSA-S
14(17) 20(22) 22(19) 10(9) 11(9) 15/15
2: CMSA 9.1(2) 17(21) 19(18) 9.4(9) 10(8) 15/15
f
13
132 250 1310 1752 2255 15/15
1: CMSA-S 12(13) 25(16) 7.1(4) 8.2(3) 13(16) 14/15
2: CMSA 5.0(7) 27(25) 7.2(5) 7.2(4) 7.0(3) 14/15
f
14
10 58 139 251 476 15/15
1: CMSA-S 1.6(2) 2.9(1) 5.7(2) 8.6(3) 8.1(4) 15/15
2: CMSA 1.3(2) 3.4(1) 5.4(2) 8.7(4) 8.3(4) 15/15
f
15
511 19369 20073 20769 21359 14/15
1: CMSA-S 15(1) ∞ ∞ ∞ ∞1.0e5 0/15
2: CMSA 132(196) 72(80) 70(77) 68(77) 66(77) 1/15
f
16
120 2662 10449 11644 12095 15/15
1: CMSA-S 3.1(3) 526(620) ∞ ∞ ∞1.0e5 0/15
2: CMSA 3.3(3) 245(282) ∞ ∞ ∞1.0e5 0/15
f
17
5.2 899 3669 6351 7934 15/15
1: CMSA-S 3.3(5) 98(167) ∞ ∞ ∞1.0e5 0/15
2: CMSA 2.6(3) 223(278) 177(218) ∞ ∞1.0e5 0/15
f
18
103 3968 9280 10905 12469 15/15
1: CMSA-S 70(0.7) 101(126) ∞ ∞ ∞1.0e5 0/15
2: CMSA 0.90(0.7) 22(38) 151(172) ∞ ∞1.0e5 0/15
f
19
1 242 1.2e5 1.2e5 1.2e5 15/15
1: CMSA-S 3.1(2) 2730(3097) ∞ ∞ ∞1.0e5 0/15
2: CMSA 3.0(3) 1186(1448) ∞ ∞ ∞1.0e5 0/15
f
20
16 38111 54470 54861 55313 14/15
1: CMSA-S 1.6(1) ∞ ∞ ∞ ∞1.0e5 0/15
2: CMSA 1.9(1) ∞ ∞ ∞ ∞1.0e5 0/15
f
21
41 1674 1705 1729 1757 14/15
1: CMSA-S377(1220) 388(448) 382(469)376(434)370(455) 2/15
2: CMSA 612(1220) 836(970) 821(909)810(882)797(939) 1/15
f
22
71 938 1008 1040 1068 14/15
1: CMSA-S514(705) 693(853) 645(793)626(673)610(773) 2/15
2: CMSA 513(705) 694(852) 646(794)626(721)610(703) 2/15
f
23
3.0 14249 31654 33030 34256 15/15
1: CMSA-S 2.0(2) ∞ ∞ ∞ ∞1.0e5 0/15
2: CMSA 3.2(3) ∞ ∞ ∞ ∞1.0e5 0/15
f
24
1622 6.4e6 9.6e6 1.3e7 1.3e7 3/15
1: CMSA-S 33(62) ∞ ∞ ∞ ∞1.0e5 0/15
2: CMSA 17(31) ∞ ∞ ∞ ∞1.0e5 0/15
∆ f 1e+1 1e-1 1e-3 1e-5 1e-7 #succ
f
1
43 43 43 43 43 15/15
1: CMSA-S 4.7(1) 15(3) 27(3) 38(2) 48(3) 15/15
2: CMSA 4.7(0.9) 14(2) 24(2) 35(3) 46(3) 15/15
f
2
385 387 390 391 393 15/15
1: CMSA-S331(232) 567(121) 647(81) 704(91) 755(82) 15/15
2: CMSA 332(106) 561(127) 637(154) 687(182)786(186) 14/15
f
3
5066 7635 7643 7646 7651 15/15
1: CMSA-S ∞ ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA ∞ ∞ ∞ ∞ ∞4.0e5 0/15
f
4
4722 7666 7700 7758 1.4e5 9/15
1: CMSA-S ∞ ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA ∞ ∞ ∞ ∞ ∞4.0e5 0/15
f
5
41 41 41 41 41 15/15
1: CMSA-S 10(3) 13(4) 13(4) 13(4) 13(4) 15/15
2: CMSA 11(3) 16(4) 16(4) 16(4) 16(4) 15/15
f
6
1296 3413 5220 6728 8409 15/15
1: CMSA-S 1.6(1) 6.4(10) 63(78) 388(475)682(690) 0/15
2: CMSA 1.7(0.4) 7.0(6) 231(278) ∞ ∞4.0e5 0/15
f
7
1351 9503 16524 16524 16969 15/15
1: CMSA-S649(862) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 299(444) ∞ ∞ ∞ ∞4.0e5 0/15
f
8
2039 4040 4219 4371 4484 15/15
1: CMSA-S 25(9) 49(50) 50(47) 50(49) 50(51) 13/15
2: CMSA 23(14) 67(62) 67(60) 66(58) 66(57) 11/15
f
9
1716 3277 3455 3594 3727 15/15
1: CMSA-S 27(10) 63(64) 64(60) 64(57) 64(54) 13/15
2: CMSA 27(7) 52(8) 54(8) 54(9) 54(8) 14/15
f
10
7413 10735 14920 17073 17476 15/15
1: CMSA-S 17(6) 19(5) 15(4) 15(3) 15(3) 15/15
2: CMSA 17(10) 21(5) 17(5) 16(5) 18(5) 14/15
f
11
1002 6278 9762 12285 14831 15/15
1: CMSA-S 14(4) 4.1(1) 4.2(1) 5.1(3) 5.5(3) 15/15
2: CMSA 13(5) 3.6(1) 3.8(1.0) 4.6(2) 4.8(1) 15/15
f
12
1042 2740 4140 12407 13827 15/15
1: CMSA-S
8.5(16) 23(22) 26(15) 12(5) 12(4) 15/15
2: CMSA 5.8(15) 23(25) 26(16) 12(6) 13(6) 15/15
f
13
652 2751 18749 24455 30201 15/15
1: CMSA-S 46(0.8) 583(727) 299(325) ∞ ∞4.0e5 0/15
2: CMSA 704(921) 946(1163) ∞ ∞ ∞4.0e5 0/15
f
14
75 304 932 1648 15661 15/15
1: CMSA-S 2.0(0.6) 2.6(0.5) 5.9(2) 16(5) 6.8(2) 14/15
2: CMSA 2.0(0.6) 2.6(0.7) 6.2(0.8) 16(5) 6.0(2) 15/15
f
15
30378 3.1e5 3.2e5 4.5e5 4.6e5 15/15
1: CMSA-S ∞ ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA ∞ ∞ ∞ ∞ ∞4.0e5 0/15
f
16
1384 77015 1.9e5 2.0e5 2.2e5 15/15
1: CMSA-S 2.9(3) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 107(146) ∞ ∞ ∞ ∞4.0e5 0/15
f
17
63 4005 30677 56288 80472 15/15
1: CMSA-S 1.1(1) 1399(1498) ∞ ∞ ∞4.0e5 0/15
2: CMSA 1.1(1) 650(749) ∞ ∞ ∞4.0e5 0/15
f
18
621 19561 67569 1.3e5 1.5e5 15/15
1: CMSA-S 0.96(0.5) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 1.0(0.4) ∞ ∞ ∞ ∞4.0e5 0/15
f
19
1 3.4e5 6.2e6 6.7e6 6.7e6 15/15
1: CMSA-S 4.8(4) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 6.4(9) ∞ ∞ ∞ ∞4.0e5 0/15
f
20
82 3.1e6 5.5e6 5.6e6 5.6e6 14/15
1: CMSA-S 2.0(0.6) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 2.0(0.9) ∞ ∞ ∞ ∞4.0e5 0/15
f
21
561 14103 14643 15567 17589 15/15
1: CMSA-S 51(1.0) 43(57) 41(55) 39(51) 34(45) 6/15
2: CMSA 179(356) 184(227) 178(191) 167(193)148(171) 2/15
f
22
467 23491 24948 26847 1.3e5 12/15
1: CMSA-S430(857) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 429(857) ∞ ∞ ∞ ∞4.0e5 0/15
f
23
3.2 67457 4.9e5 8.1e5 8.4e5 15/15
1: CMSA-S 2.1(2) ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA 2.3(3) ∞ ∞ ∞ ∞4.0e5 0/15
f
24
1.3e6 5.2e7 5.2e7 5.2e7 5.2e7 3/15
1: CMSA-S ∞ ∞ ∞ ∞ ∞4.0e5 0/15
2: CMSA ∞ ∞ ∞ ∞ ∞4.0e5 0/15
rithms may be further improved by applying other es-
timators for the covariance.
This paper considered a combination of two es-
timation approaches to provide a first step on this
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
98

way. Shrinkage estimators shrink the sample covari-
ance matrix towards the identity matrix or diagonal
matrix in the case of the paper. In cases, where the
fitness function requires highly different eigenvalues
and a rotation other than the cartesian coordinate sys-
tem this may be problematic. Therefore, a switch to-
wards the eigenspace of the covariance matrix was
proposed in this paper and investigated in experiments
on the BBOB test suite.
REFERENCES
Audet, C. (2013). A survey on direct search methods
for blackbox optimization and their applications. In
Mathematics without boundaries: Surveys in inter-
disciplinary research. Springer. To appear. Also Les
Cahiers du GERAD G-2012-53, 2012.
Bai, Z. D. and Silverstein, J. W. (1998). No eigenvalues
outside the support of the limiting spectral distribution
of large-dimensional sample covariance matrices. The
Annals of Probability, 26(1):316–345.
Beyer, H.-G. (2001). The Theory of Evolution Strategies.
Natural Computing Series. Springer, Heidelberg.
Beyer, H.-G. and Meyer-Nieberg, S. (2006). Self-adaptation
of evolution strategies under noisy fitness evalua-
tions. Genetic Programming and Evolvable Machines,
7(4):295–328.
Beyer, H.-G. and Schwefel, H.-P. (2002). Evolution strate-
gies: A comprehensive introduction. Natural Com-
puting, 1(1):3–52.
Beyer, H.-G. and Sendhoff, B. (2008). Covariance matrix
adaptation revisited - the CMSA evolution strategy -.
In Rudolph, G. et al., editors, PPSN, volume 5199 of
Lecture Notes in Computer Science, pages 123–132.
Springer.
Chen, X., Wang, Z., and McKeown, M. (2012). Shrinkage-
to-tapering estimation of large covariance matri-
ces. Signal Processing, IEEE Transactions on,
60(11):5640–5656.
Chen, Y., Wiesel, A., Eldar, Y. C., and Hero, A. O.
(2010). Shrinkage algorithms for MMSE covariance
estimation. IEEE Transactions on Signal Processing,
58(10):5016–5029.
Conn, A. R., Scheinberg, K., and Vicente, L. N. (2009).
Introduction to Derivative-Free Optimization. MOS-
SIAM Series on Optimization. SIAM.
Dong, W. and Yao, X. (2007). Covariance matrix repair-
ing in gaussian based EDAs. In Evolutionary Com-
putation, 2007. CEC 2007. IEEE Congress on, pages
415–422.
Eiben, A. E. and Smith, J. E. (2003). Introduction to
Evolutionary Computing. Natural Computing Series.
Springer, Berlin.
Finck, S., Hansen, N., Ros, R., and Auger, A. (2010).
Real-parameter black-box optimization benchmark-
ing 2010: Presentation of the noiseless functions.
Technical report, Institute National de Recherche en
Informatique et Automatique. 2009/22.
Fisher, T. J. and Sun, X. (2011). Improved Stein-type
shrinkage estimators for the high-dimensional mul-
tivariate normal covariance matrix. Computational
Statistics & Data Analysis, 55(5):1909 – 1918.
Hansen, N. (2006). The CMA evolution strategy: A com-
paring review. In Lozano, J. et al., editors, To-
wards a new evolutionary computation. Advances in
estimation of distribution algorithms, pages 75–102.
Springer.
Hansen, N., Auger, A., Finck, S., and Ros, R. (2012).
Real-parameter black-box optimization benchmark-
ing 2012: Experimental setup. Technical report, IN-
RIA.
Hansen, N., Auger, A., Ros, R., Finck, S., and Po
ˇ
s
´
ık, P.
(2010). Comparing results of 31 algorithms from the
black-box optimization benchmarking BBOB-2009.
In Proceedings of the 12th annual conference com-
panion on Genetic and evolutionary computation,
GECCO ’10, pages 1689–1696, New York, NY, USA.
ACM.
Hansen, N. and Ostermeier, A. (2001). Completely deran-
domized self-adaptation in evolution strategies. Evo-
lutionary Computation, 9(2):159–195.
Huber, P. J. (1981). Robust Statistics. Wiley, New York.
Ledoit, O. and Wolf, M. (2004). A well-conditioned estima-
tor for large dimensional covariance matrices. Journal
of Multivariate Analysis Archive, 88(2):265–411.
Ledoit, O. and Wolf, M. (2012). Non-linear shrinkage esti-
mation of large dimensional covariance matrices. The
Annals of Statistics, 40(2):1024–1060.
Meyer-Nieberg, S. and Beyer, H.-G. (2007). Self-adaptation
in evolutionary algorithms. In Lobo, F., Lima, C., and
Michalewicz, Z., editors, Parameter Setting in Evo-
lutionary Algorithms, pages 47–76. Springer Verlag,
Heidelberg.
Rechenberg, I. (1973). Evolutionsstrategie: Optimierung
technischer Systeme nach Prinzipien der biologischen
Evolution. Frommann-Holzboog Verlag, Stuttgart.
Sch
¨
affer, J. and Strimmer, K. (2005). A shrinkage approach
to large-scale covariance matrix estimation and impli-
cations for functional genomics,. Statistical Applica-
tions in Genetics and Molecular Biology, 4(1):Article
32.
Schwefel, H.-P. (1981). Numerical Optimization of Com-
puter Models. Wiley, Chichester.
Stein, C. (1956). Inadmissibility of the usual estimator for
the mean of a multivariate distribution. In Proc. 3rd
Berkeley Symp. Math. Statist. Prob. 1, pages 197–206.
Berkeley, CA.
Stein, C. (1975). Estimation of a covariance matrix. In Rietz
Lecture, 39th Annual Meeting. IMS, Atlanta, GA.
Thomaz, C. E., Gillies, D., and Feitosa, R. (2004). A new
covariance estimate for bayesian classifiers in biomet-
ric recognition. Circuits and Systems for Video Tech-
nology, IEEE Transactions on, 14(2):214–223.
AdaptingtheCovarianceMatrixinEvolutionStrategies
99
