
Effects of Stereoscopy on a Human-Computer Interface for Network
Centric Operations
Alessandro Zocco
1
, Davide Cannone
1
and Lucio Tommaso De Paolis
2
1
Product Innovation & Advanced EW Solutions, Elettronica S.p.A., Via Tiburtina Valeria Km 13.700, Rome, Italy
2
Department of Engineering for Innovation, University of Salento, Lecce, Italy
Keywords: Stereoscopic Vision, Human Computer Interface, Network Centric Operations, Command and Control
System.
Abstract: Network Centric Warfare can be accomplished thanks to a network of geographically distributed forces,
granting a flow of increased contents, quality and timeliness of information, building up a shared situational
awareness. When this flow is displayed to an operator, there is the possibility of reaching a state of
information overload. To avoid this situation, new ways to conceive the interface between human and
computer must be evaluated. This paper proposes an experimental stereoscopic 3D synthetic environment
aimed to improve the understanding of the modern battle spaces. This facility is part of the LOKI Project, a
Command and Control system for Electronic Warfare developed by Elettronica S.p.A. We discuss technical
details of the system and describe a preliminary usability study. This first evaluation is very positive and
encourages continuing research into Human-Computer Interaction for military applications.
1 INTRODUCTION
Network Centric Warfare (NCW) (U.S. Navy, 1995;
Braulinger, 2005), and consequently Network
Centric Operations (NCO), can be accomplished
thanks to a network of geographically distributed
forces. The network, directly connected to the
platforms by means of sensing, commanding,
controlling and engaging systems, increases
contents, quality, and timeliness of information
between nodes enhancing the situational awareness.
In this context is more appropriate talking of shared
situational awareness, because all the network
elements can have access at the same up-to-date
information.
Figure 1 shows an example of a Network Centric
scenario: two different platforms (e.g., ships), have
the capability of sensing some limited areas and
each one has a personal limited awareness of its
proximity (a); each platform sends collected data
(e.g., electromagnetic tracks) (in (a) depicted as
dotted arrows starting from ships) to a specific
platform, known as Command and Control (C2), that
has the special task to fuse data, in a manual or
automatic way; then, the C2 sends the fused data (in
(b) depicted as solid arrows starting from C2) to the
platforms; in this way they will share the same
enhanced situational awareness (b); this process is
continuously repeated during the military operation.
a)
b)
Figure 1: Example of a Network Centric scenario. In (a)
each naval platform is collecting local data and send them
to the C2 platform. In (b), C2 platform is sharing fused
data with the naval platform, building up their shared
situational awareness.
As described in the example, the C2 holds an
important role in these networks; it is the system
devoted to the decision-making process of the
operational aspects of the warfare. Such systems are
operated by commanders by means of a Human
Computer Interface (HCI), in order to get access to
information gained by the other platforms, that act
like sensors in the network, and in order to make
decisions (e.g., sharing the commander’s perception
249
Zocco A., Cannone D. and Tommaso De Paolis L..
Effects of Stereoscopy on a Human-Computer Interface for Network Centric Operations.
DOI: 10.5220/0004850902490255
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 249-255
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

of the situation, manifesting command decisions)
(Alberts, Garstka and Stein, 1999).
Increasing the number of commanded platforms,
an operator of the C2 can easily reach a state of
information overload, where information flow rate is
greater than the operator’s processing rate; this
situation could cause a wrong mental model of the
mission scenario and, consequently, the making of
wrong decisions that could lead to catastrophic
situations (Shanker and Richtel, 2011).
Thus, the HCI becomes a key factor when
developing the architecture of a C2.
The focus of this paper is on the display issues of
a HCI and how it can be improved in order to reduce
information overload and enhance the usability of
information. In particular, we evaluate usability of
an immersive synthetic environment in the
understanding of a NCW scenario.
This research is part of the LOKI Project, a
Command and Control (C2) system for Electronic
Warfare (EW) developed by Elettronica S.p.A.
(ELT). Despite this work focuses on warfare topic,
we believe that any time-pressure system operated
by a human (e.g., HCI for network Intrusion
Detection System), for network operations can
benefit from this research (Cox, Eick and He, 1996).
2 RELATED WORKS
Gaining a detailed understanding of the modern
battle space is essential for the success of any
military operation.
In these applications, the main function of a
human-computer interface is to display the current
situation and the relevant information and intentions
to the operator (e.g., location of own forces,
reconnoitered opponent troops and facilities,
commands and order from the superiors, platforms’
status); this information is generally displayed on
scaled maps with regional properties of the mission
area.
Several research groups have focused their
activities on the design and development of new
display paradigms and technologies for advanced
information visualization.
Dragon (Julier, et al., 1999) has been one of the
first research projects in formalizing requirements
for systems with the need to visualize a huge amount
of information on tactical maps for real-time
applications. A real-time situational awareness
virtual environment for battlefield visualization has
been realized with an architecture composed of
interaction devices, display platforms and
information sources.
Other solutions have been proposed by
Pettersson, Spak and Seipel (2004) and Alexander,
Renkewitz and Conradi (2006). In the former, the
proposed visualization environment is based on the
projection of four independent stereoscopic image
pairs at full resolution upon a custom designed
optical screen. This system suffers from apparent
crosstalk between stereo images pairs. The latter
presents some examples of Augmented Reality and
Virtual Reality technologies, showing benefits and
flaws, and the results of the experiments regard the
evaluation of visibility and interactivity
performances.
Kapler and Wright (2005) have developed a
novel visualization technique for displaying and
tracking events, objects and activities within a
combined temporal and geospatial display. The
events are represented within an X, Y, T coordinate
space, in which the X and Y plane shows flat
geographic space and the T-axis represents time into
the future and past. This technique is not adequate
for an immersive 3D virtual environment because it
uses an axis to describe the time evolution constrains
the spatial representation on a flat surface; the
altitude information, that is an important information
in avionic scenarios, can’t be displayed. However, it
is remarkable that the splitting-up of geographical
and logical information (e.g., health of a platform)
can enhance the usability of the system.
3 STEREOSCOPIC VISION
The stereoscopic vision can improve the
understanding of a modern battle space by providing
the depth perception and enhancing the level of
realism and the sense of presence.
Different technologies have been developed for
generating 3D stereoscopic visualization. Some of
these are related to entertainment such as cinema
(Lipton, 2007) and video games (Mahoney,
Oikonomou and Wilson, 2011), as well as to other
serious/work-related applications such as medical
interventions and telerobotics (Dey, et al., 2002;
Livatino, et al., 2010).
Stereoscopic visualization, or simply stereo, can
be active or passive (Cyganek and Siebert, 2009). In
short, passive stereo is a solution where light is
polarized differently for left and right eyes. The
polarization can be obtained in various ways; the
most known is the colour polarization, used in
cinemas in the 1950s for the first time. Nowadays,
the most used polarizations within virtual reality
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
250
applications are the linear polarization or the circular
one. The latter has more degrees of freedom than the
former when the viewer moves the head in relation
to the image, avoiding effects that may degrade the
stereo perception.
Passive stereo only needs a pair of low-cost LCD
projectors, a pair of light cardboard glasses, both
with built-in polarization filters and a good
reflecting screen that assures that the light beam
isn’t omnidirectional reflected, but straight back to
the viewer.
The active stereo requires glasses synchronized
with the projectors; so, the right and left lens are
blackened out alternately at the same rate of the
images projected on the screen for the left and right
eyes. Active stereo is generally more expensive than
passive one because the former has the requirement
of a 120 Hz image frequency and the normal
projectors are usually not built for this frequency.
The stereoscopic visualization artificially
reproduces the mechanisms that govern the
binocular vision and it is closer to the way we
naturally see the world (Drascic, 1991).
The stereoscopy leads to several improvements:
comprehension and appreciation of presented visual
inputs, perception of structure in visually complex
scenes, spatial localization, motion judgment,
concentration on different depth planes and
perception of material surfaces.
However, a stereo vision could be hard to get
right at first attempt because the hardware could
cause crosstalk, misalignment, image distortion (due
to lens, displays or projectors), and all these
situations can cause eye strain, a double image
perception, depth distortion, look around distortion
(typical for head-tracked displays). These drawbacks
prevented a large application of stereoscopic
visualization (Sexton and Surman, 1999).
4 PROPOSED INVESTIGATION
The main goal of the research presented in this paper
is the design and implementation of a visualization
system for NCW scenarios (e.g., displaying symbols
and logical information on tactical maps) by creating
a stereoscopic 3D synthetic environment aimed at a
total immersion of the operator. This facility is part
of the LOKI Project, a C2 system for Electronic
Warfare.
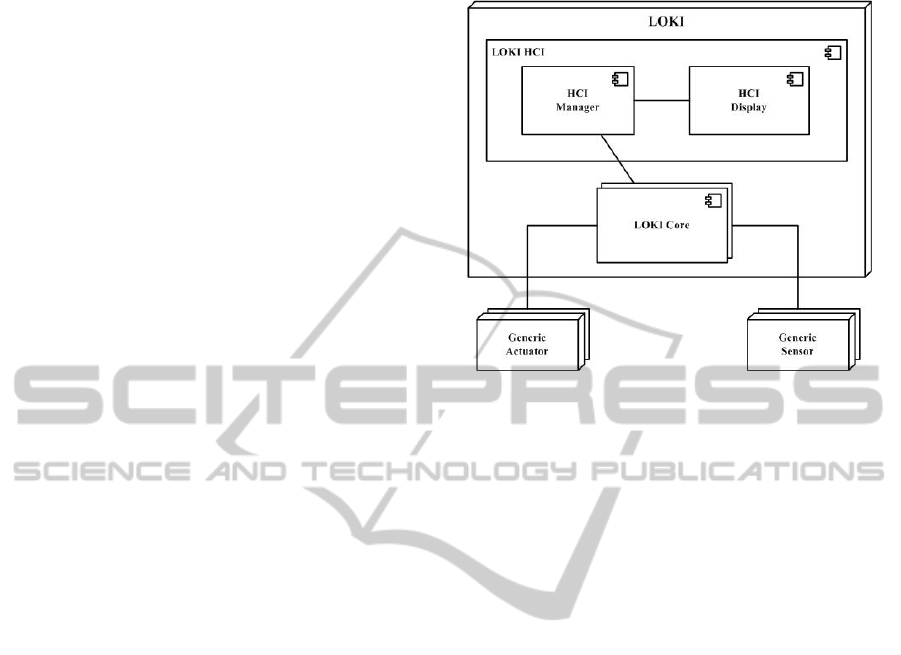
4.1 High-level Architecture of LOKI
Figure 2 shows the high-level architectural view of
the LOKI system.
Figure 2: LOKI architecture in the large.
The LOKI Core component continuously executes
an advanced multi-sensor data fusion process on the
data retrieved from cooperating systems. Once these
data are properly fused, the system is capable to
infer new important information such as a better
localization of emitters and countermeasures
strategy. This information is transferred to the LOKI
HCI using a communication middleware based on
Data Distribution Service (DDS) paradigm (OMG,
2007).
The HCI Manager component provides a
persistence mechanism to decouple the presentation
layer from the core application logic. It is
responsible for the communication with the core
(i.e., receiving input data by the core and sending
operator commands to the core) and for the
translation of received data in a model
understandable by the presentation layer.
The HCI Display component contains the
elements that implement and display the User
Interface (UI) and manage user interaction. It
provides a high definition view of a realistic
geographic environment. Platforms are positioned
on the scene according to their geographic
coordinates and are represented according to the
Common Warfighting Symbology MIL-STD-2525C
standard (Department of Defense, 2008).
4.2 Design Choices for HCI
The HCI has been designated with high modularity
applying UI Design Patterns (UIDP). Using these
patterns helps to ensure that key human factors
concepts are quickly and correctly implemented
EffectsofStereoscopyonaHuman-ComputerInterfaceforNetworkCentricOperations
251

within the code of advanced visual user interfaces
(Feng, Liu and Wan, 2006). In addition, structural
patterns Composite and Decorator were used: the
former allows to dynamically add properties (e.g.,
borders around a window) or behaviors (e.g.,
scrolling) to any component of the interface; the
latter allows to compose interfaces as tree structures,
to show part-whole structures, and lets to equally
handle single objects and compositions (Gamma, et
al., 2005).
The software has been developed in Java
language, using an OpenGL binding in order to talk
to the OpenGL runtime installed on the underlying
operating system.
Figure 3: Visualization of EW entities with their
geographic location.
Figure 3 shows a sample of the interface, built up in
two different layers, as inspired by the research of
Kapler and Wright (2005). A 3D terrain map, in the
bottom part of the screen, is used to show both
features of the selected terrain and geographic data
of the elements of the scenario (e.g., real position,
past track) and for elements that are not grounded, a
transparent curtain is used to indicate their altitude.
A parallel layer, that hosts the so-called “logical
view” of the scenario, displayed above is used to
represent other relevant non-geographic information
(e.g., health status, lethality); it can be also used to
visualize connections between the elements and to
show elements that are outside the area that the
operator is currently viewing in the geographic layer
below. The geographical reference is maintained
through connections between the two layers, using
an algorithm of forces that avoids most possible
crossing between lines. This separation, with the use
of colours to show different levels of alerts, grants
the operator the possibility to focus on geographic
locations avoiding the overloading of symbols and
text on the terrain.
4.3 Hardware Setup
The stereo vision setup includes:
a PC equipped with a Nvidia Quadro graphics
card;
a Digital Light Processing (DLP) projector with a
WUXGA (1920x1200px) resolution and a
brightness of 7000 ANSI lumens;
a special eyewear comprising two infrared
controlled Liquid Crystal Display (LCD) light
shutters working in synchronization with the
projector (Figure 4).
Figure 4: Active 3D display system.
When the projector displays the left eye image, the
right eye shutter of the active stereo eyewear is
closed, and vice versa. The projector is capable of
displaying at a refresh rate high enough (greater than
120 Hz) in order that the viewer does not perceive a
flicker between alternate frames. We decided to
choose an active stereo system because more light is
projected to each eye and therefore the 3D image
appears brighter. We adjusted stereo parameters
(i.e., separation and convergence) in order to obtain
a negative screen parallax. So, when stereo pair is
viewed through shutter glasses, the 3D objects of the
scene appear out of the screen (Figure 5).
Figure 5: Binocular fusion of the stereo pairs.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
252
4.4 Evaluation Setup
The preliminary evaluation study took place at the
facilities of ELT in Rome and involved 12 users.
The case study required around half hour per
participant to be completed.
To evaluate the proposal, we developed a
realistic scenario based on a coastal sea surveillance
task. The user supervises, using both mono and
stereo visualization, a relatively big area of sea, the
Strait of Sicily, where there is a large volume of
traffic, generated by different types of vessels. The
operator is able to see the trajectory generated by
each track and intelligence regarding each vessel.
The simulator, where the scenario is developed
and executed, is an integration with Commercial-
Off-The-Shelf (COTS) products and proprietary
software and is based on the principles of distributed
and live simulation (Sindico, et al., 2012).
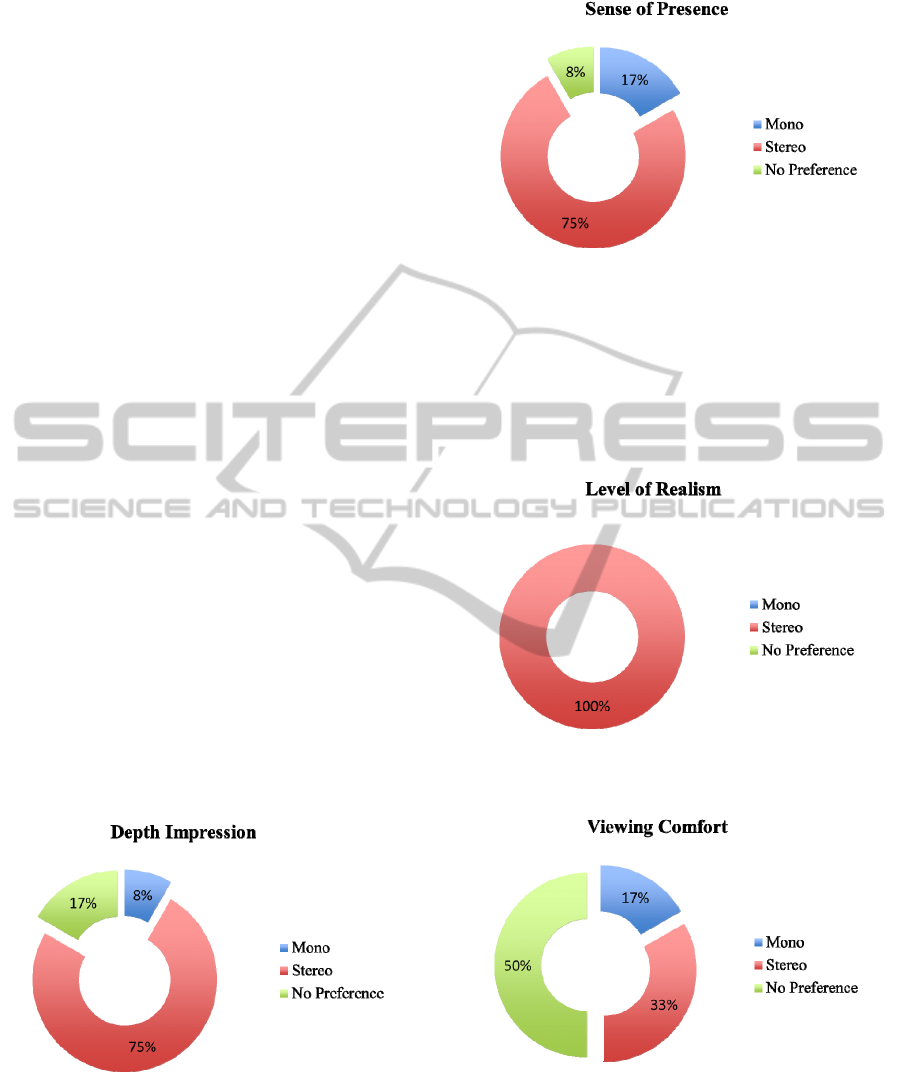
The following qualitative data were collected
using questionnaires and interviews: the realism of
the visual feedback, the sense of presence, the depth
impression and the user’s viewing comfort.
4.5 Results
Most of the participants had no doubts that the depth
impression (see Figure 6) and the sense of presence
(see Figure 7) are higher in case of stereo
visualization. With complex electronic warfare
scenarios, when monocular depth cues are
ambiguous, the stereo viewing enhances spatial
judgments: it is possible to detect very closely
spaced icons on the screen (representing platforms
with installed active emitters).
Figure 6: Preferences about depth impression by
participants of the preliminary evaluation study.
All users find that stereo visualization provides more
realism than mono-viewing (see Figure 8). The
image resulting from the fusion of the stereoscopic
pair is very clear and natural looking because
Figure 7: Preferences about sense of presence by
participants of the preliminary evaluation study.
surface properties such as luster, scintillation, and
sheen are different in luminance and colour between
the left and right retinal images. This allows the
viewer to perceive the differences between
successive frames (e.g., platforms’ positions) at a
glance.
Figure 8: Preferences about level of realism by
participants of the preliminary evaluation study.
Figure 9: Preferences about viewing comfort by
participants of the preliminary evaluation study.
There is no significant difference in viewing comfort
between stereo and mono visualization (see Figure
9). This result, obtained through a reduction of the
amount of parallax within each stereo pair,
EffectsofStereoscopyonaHuman-ComputerInterfaceforNetworkCentricOperations
253

contradicts the general assumption of stereo viewing
causes some problems such as visual fatigue and
headache.
5 CONCLUSIONS AND FUTURE
WORK
In the design and development of the C2 systems for
NCO, a key element is the HCI. Bad assumptions
may lead to bad design choices; those in turn may
lead the operator to an information overload state.
To avoid this situation, new ways to conceive HCI
must be explored.
In this paper we evaluated the use of a
stereoscopic 3D synthetic environment, aiming at a
total immersion of the operator.
Preliminary evaluation shows the relevant role
played by stereo visualization and its advantages in
terms of sense of depth, presence and realistic
viewing perception. The results presented are not
authoritative in terms of metrics; however, they
represent the initial experimentation phase of
continuing research into user interface measurement
for military purposes.
The lack of comparative evaluation with respect
to other works specifically addressing NCW is due
to the actual complexity of this domain. Livatino et
al. (2010) obtained similar results in mobile robot
teleguide based on video images. Even if applicative
domains are different, similar results confirmed that
we are in the right direction and more investigation
must be done into HCI for military applications.
In the next future, we are interested in
performing a formal user study aimed at improving
and extending previous evaluations. We have
designed a test plan according to recommendation
gathered from the literature.
The test procedure will start with a brief
presentation of the project and the purpose of the
evaluation study. Then a visual attention test will be
performed to classify the participants' level of
selective visual attention. Each user will be involved
in the understanding of a complex NCW scenario
within an interactive test, during which quantitative
data (e.g. errors made while estimating the distance,
number and percentage of tasks completed correctly)
will be recorded. The last step consists in the
completion of pre-designed questionnaires to acquire
qualitative data referring to the users' experience
with stereovision technology.
We will evaluate the viewing comfort by
subjecting participants to an intensive use of the
system (about 3 hours). We will put special attention
on the counterbalancing of the tasks as well as the
sequence during the entire user study to avoid
fatigue and learning effects. This aim will require
the participants to perform the tests according to a
precise schedule.
The collected evaluation measures will be
analyzed through inferential and descriptive
statistics and the results will be graphically
represented by means of diagrams.
We expect that formal test results will clearly
confirm the benefits of the stereoscopic vision in the
understanding of a NCW scenario.
ACKNOWLEDGEMENTS
We would like to thank the colleague Andrea
Sindico, who has supported us on the integration
with this research and the LOKI project.
REFERENCES
Alberts, D. S., Garstka J.J. and Stein F. P., 1999. Network
Centric Warfare: Developing and Leveraging
Information Superiority. 2
nd
ed. United States: CCRP
Publication Series.
Alexander, T., Renkewitz, H., Conradi, J., 2006.
Applicability of Virtual Environments as C4ISR
Displays. United States of America, [online].
Available at: http://www.dtic.mil/cgi-bin/
GetTRDoc?AD=ADA473296 (accessed on 14
October 2013)
Braulinger, T.K., 2005. Network Centric Warfare
Implementation and Assessment. Master’s Thesis. U.S.
Army Command and General Staff College.
Cox, K. C., Eick, S. G. and He, T., 1996. 3D Geographic
Network Displays. ACM Sigmod Record, 25(4), pp.50-
54.
Cyganek, B. and Siebert, J. P., 2009. An Introduction to
3D Computer Vision Techniques and Algorithms.
Great Britain: John Wiley & Sons, Ltd.
Department of Defense, 2008. MIL-STD-2525C: Common
Warfighing Symbology. United States of America,
(online). Available at: http://www.mapsymbs.com/
ms2525c.pdf (Accessed on 14 October 2013).
Dey, D., Gobbi, D. G., Slomka, P.J., Surry, K. J. M. and
Peters, T. M, 2002. Automatic Fusion of Freehand
Endoscopic Brain Images to Three-Dimensional
Surfaces: Creating Stereoscopic Panoramas. IEEE
Transaction on Medical Imaging, 21(1), pp.23-30.
Drascic, D., 1991. Skill Acquisition and Task Performance
in Teleoperation using Monoscopic and Stereoscopic
Video Remote Viewing. Human Factors and
Ergonomics Society Annual Meeting, 35(19), pp.1367-
1371.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
254

Feng, S., Liu M., Wan J., 2006. An agilely adaptive User
Interface based on Design Pattern. In: IEEE, 6
th
International Conference on Intelligent Systems
Design and Applications, Jinan, China, 16-18 October
2006. Available on: IEEE Xplore Digital Library
(Accessed on 5 March 2013).
Gamma, E., Helm, R., Johnson, R. and Vlissides, J., 2005.
Design Patterns: Elements of Reusable Object-
Oriented Software. Massachussets (USA): Addison-
Wesley.
Julier S., King, R., Colbert, B., Durbin, J. and Rosenblum,
L., 1999. The Software Architecture of a Real-Time
Battlefield Visualization Virtual Environment. In:
IEEE, Proceedings of Virtual Reality. Houston, Texas,
USA, 13-17 March 1999. Available on: IEEE Xplore
Digital Library [Accessed on 26 July 2012].
Kapler, T. and Wright, W., 2005. Geotime Information
Visualization. Information Visualization, 4(2), pp.136-
146.
Lipton, L., 2007. The Last Great Innovation: The
Stereoscopic Cinema. SMPTE Motion Imaging
Journal, 116(11-12), pp.518-523.
Livatino, S., Muscato G., Sessa, S. and Neri, V., 2010.
Depth-enhanced mobile robot teleguide based on laser
images. Mechatronics, 20(7), pp. 739-750.
Mahoney, N., Oikonomou, A. and Wilson, D., 2011.
Stereoscopic 3D in Video Games: A Review of
Current Design Practices and Challenges. In: IEEE,
16
th
International Conference on Computer Games.
Louisville, KY, USA, 27-30 July 2011. Available on:
IEEE Xplore Digital Library (Accessed on 26 July
2012).
OMG, 2007. DDS, http://portals.omg.org/dds/ (Accessed
on 08 April 2013).
Pettersson, L. W., Spak, U. and Seipel S., 2004.
Collaborative 3D Visualizations of Geo-Spatial
Information for Command and Control. In:
Proceedings of SIGRAD, Gävle, Sweden, 24-25
November 2004. Available on: LiU Electronic Press
(Accessed on 26 July 2012).
Sexton, I. and Surman, P., 1999. Stereoscopic and
Autostereoscopic Display Systems. IEEE Signal
Processing Magazine, 16(3) pp.85-89.
Shanker, T. and Richtel, M., 2011. In New Military, Data
Overload can be Deadly. The New York Times,
(online) 17 January 2011. Available at:
http://www.umsl.edu/~sauterv/DSS4BI/links/17brain.
pdf (Accessed on 14 October 2013).
Sindico, A., Cannone, D., Tortora, S., Italiano, G. F.,
Naldi, M., 2012. Distributed Simulation of Electronic
Warfare Command and Control Scenarios. In:
Proceedings of Symposium on Navy Operational
Research and Logistics (SPOLM). Rio de Janeiro,
Brazil, 23-24 August 2012.
U.S. Navy, 1995. Copernicus… Forward C4I for the 21
st
Century. United States: Office of Chief of Naval
Operations (OPNAV). Available at: http://
www.navy.mil/navydata/policy/coperfwd.txt (accessed
on 14 October 2013).
EffectsofStereoscopyonaHuman-ComputerInterfaceforNetworkCentricOperations
255
