
Motion Characterization of a Dynamic Scene
Arun Balajee Vasudevan
1
, Srikanth Muralidharan
1
Shiva Pratheek Chintapalli
1
and Shanmuganathan Raman
2
1
Electrical Engineering, Indian Institute of Technology Jodhpur, Jodhpur, Rajasthan, India
2
Electrical Engineering, Indian Institute of Technology Gandhinagar, Gujarat, India
Keywords:
Image and Video Analysis, Scene Understanding, Segmentation and Grouping.
Abstract:
Given a video, there are many algorithms to separate static and dynamic objects present in the scene. The pro-
posed work is focused on classifying the dynamic objects further as having either repetitive or non-repetitive
motion. In this work, we propose a novel approach to achieve this challenging task by processing the optical
flow fields corresponding to the video frames of a dynamic natural scene. We design an unsupervised learning
algorithm which uses functions of the flow vectors to design the feature vector. The proposed algorithm is
shown to be effective in classifying a scene into static, repetitive, and non-repetitive regions. The proposed ap-
proach finds significance in various vision and computational photography tasks such as video editing, video
synopsis, and motion magnification.
1 INTRODUCTION
Computer vision involves estimation of scene infor-
mation, which the human vision can perceive very
easily, from images and videos using efficient algo-
rithms. One of the challenging problems in computer
vision is the identification of the type of motion a
given object exhibits in a natural scene. Analysing
motions of different objects in a scene might be a triv-
ial task for a human being. However, it is extremely
complex for a computer. This complexity is due to the
differences in the appearance of the objects and the
different types of motion each object may undergo at
a given time. Given a digital image/video, computer
vision researchers strive to perform high level vision
tasks such as recognition and segmentation.
However, the digital video captured is just a 2D
projection of the 3D scene being captured (Peterson,
2010). A set of consecutive video frames provide nec-
essary information for the segmentation of a scene de-
pending on the types of motion present. A scene may
have static, repetitive, and non-repetitive motion re-
gions. Algorithms based on optical flow yield flow
fields that form the basis for designing feature vector
for each pixel location. For a general natural scene,
displacement flow vectors of objects could exhibit a
wide range of variations. Hence, segmenting such
scenes is a major challenge. Segmentation of different
motion regions in a dynamic scene has various appli-
cations such as removal of occlusion, scene catego-
rization and understanding, video editing, video syn-
opsis, motion magnification, to name a few.
(a) (b) (c)
(d) (e) (f)
Figure 1: (a) Video of a dynamic scene, (b) the frames of
a video corresponding to a dynamic scene, (c), (d), and (e)
illustrate the repetitive, static, and non-repetitive regions of
the scene, and (f) output segmentation from the proposed
algorithm.
Sampled video frames of a scene having a rotating
wheel are shown in Fig. 1(a). Some of the frames ex-
tracted from the video are shown in Fig. 1(b). The
extracted frames indicate the presence of repetitive
object in the scene (wheel) and also show the pres-
ence of non-repetitive motion in an object (hand). The
scene also has static regions. Fig. 1(c), 1(d), and
1(e) depict the various types of motion regions present
in this scene. The presence of non-repetitive motion
702
Vasudevan A., Muralidharan S., Chintapalli S. and Raman S..
Motion Characterization of a Dynamic Scene.
DOI: 10.5220/0004852607020707
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 702-707
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
(like the one shown in Fig. 1(e)) is common in real
world scenes. Our approach aims at classifying these
different types of motion automatically given a video
corresponding to any natural scene.
We address this problem by designing a novel
segmentation algorithm. We shall design robust fea-
ture vectors to separate repetitive, non-repetitive, and
static regions in a natural scene. This classification
would enable us to categorise these regions and use
them to solve other computer vision applications. Our
approach can also find application in compressing the
videos. Thus we have a diverse set of applications of
the proposed approach in vision, computational pho-
tography, and video processing. For instance, redun-
dant multiple times recording of repetitive motion in
a scene such as rotating fan motion, flowing river, pe-
riodic sea waves and others can be avoided by proper
segmentation of repetitive part of the scene from the
video. This is the one of the fruitful application of our
proposed approach for three label segmentation.
The primary contributions of the proposed work
are:
1. Design of a novel feature descriptor to classify
the static, repetitive, and non-repetitive motion re-
gions in a scene.
2. Design of an unsupervised learning framework for
bottom-up segmentation of these regions.
3. The feature vectors are modelled as functions of
the contents from space time volume with finite
time support for efficient performance.
4. The approach does not depend on object surface
properties such as reflectance, texture, color, etc.
and predicts the type of motion an object under-
goes even for objects with different appearances.
In Section 2, a brief description about the related re-
search work is provided. Section 3 contains a descrip-
tion about the design of feature descriptor for unsu-
pervised learning. In Section 4, results of applying
the proposed feature vector on several dynamic scene
data sets are described. Section 5 presents the chal-
lenges facing the proposed algorithm. Section 6 pro-
vides directions regarding future work and section 7
provides the conclusion of the present work.
2 RELATED WORK
Lucas-Kanade (Lucas and Kanade, 1981) and Horn-
Schunck (Horn and Schunck, 1981) are the standard
optical flow algorithms that mostly act as building
blocks to separate static and dynamic objects in a
scene. These algorithms operate efficiently under the
assumption that the objects undergo small displace-
ments in successive frames. However even if the
above assumption is satisfied, the algorithm may not
give good results for scenes which violate brightness
constancy assumption and scenes which have trans-
parency, depth discontinuity, and specular reflections.
Some of these shortcomings have been overcome in
the approach which uses feature descriptor matching
(Black and Anandan, 1996). In order to get more ef-
ficient results in situations involving large object dis-
placements, a more recent work on optical flow uses a
hierarchical region based matching (Brox and Malik,
2011).
The flow fields obtained from an optical flow al-
gorithm serve as the basic ingredients in the recent al-
gorithms developed in the domain of video processing
and computational photography. To extend its useful-
ness to situations involving large displacements, the
Large Displacement Optical Flow (LDOF) algorithm
was developed (Brox and Malik, 2011). This algo-
rithm also uses a feature descriptor. An additional
constraint in the energy optimization equation along
with other constraints are used to establish the match-
ing criteria in LDOF.
There are motion based segmentation algorithms
that aid in background subtraction (Stauffer and
Grimson, 1999). These approaches create a Gaussian
mixture model for each pixel and segment static and
dynamic pixels using a threshold. The existing algo-
rithms in video synopsis rely on the extraction of dy-
namic objects in the scene for video synopsis (Pritch
et al., 2008). They extract these interesting objects
from the video and store them along with the tim-
ing information.The video is then condensed in which
only the interesting objects are shown with their tim-
ing information.
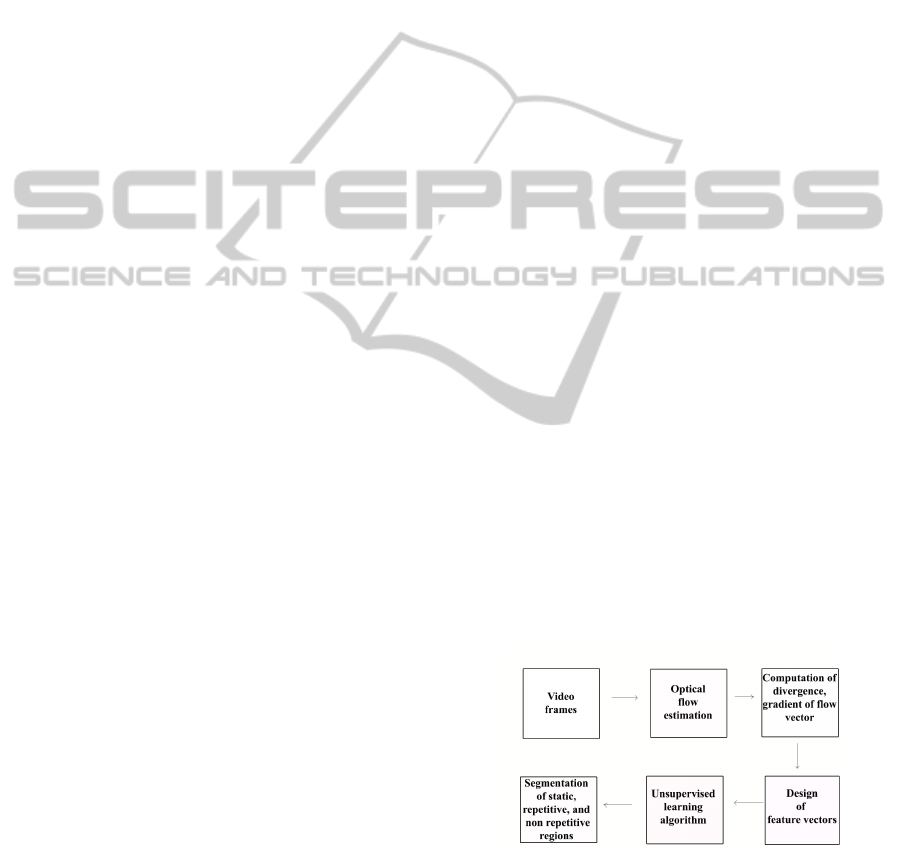
Figure 2: The Proposed Approach
The recent work on editing small movements us-
ing motion analysis of image pyramids involves the
study of phase variations of motion dependent param-
eters. The phase variations are processed temporally
to remove or enhance minute changes over time. The
MotionCharacterizationofaDynamicScene
703

processing does not involve optical flow estimation
and is therefore suitable for processing of videos of
scenes where optical flow based approaches may fail
(Wadhwa et al., 2013).
One of the recent works in the domain of moving
object segmentation is given by Bergh and Van Gool
(den Bergh and Gool, 2012). Their paper presents a
novel approach of combining color, depth and motion
information (optical flow) for segmenting the object
using superpixels. This approach takes into consid-
eration the 3D position of object and its direction of
motion while segmenting the object. Another notable
work on motion segmentation is given by Ochs and
Brox (Ochs and Brox, 2012). Their paper presents an
efficient approach of separating the moving objects
from a video using spectral clustering.
3 THE PROPOSED APPROACH
We use two of our own datasets of dynamic scene
each containing a set of seven images captured in the
burst mode with a DSLR camera. Additionally, we
use YUPenn dataset of dynamic scenes consisting of
14 different scenes (Derpanis and Wildes, 2012). We
sampled a set of 5-7 images from each dynamic scene
video present in the YUPenn dataset. In the scenes,
we come across objects that exhibit a large displace-
ment for which the standard algorithms such as Lucas
Kanade flow vector usually fail. Therefore, we use the
velocity vectors obtained from the LDOF algorithm in
these cases. For the motions with relatively small dis-
placement compared to the object size, Lucas-Kanade
algorithm is sufficient to achieve good results. Us-
age of appropriate flow vectors are done manually
depending on the type of motion- small or large dis-
placement movements. The Optical flow algorithms
applied on every two consecutive images gives 2-D
vector field consisting of optical flow vectors.
We consider the first image as the reference image
as optical flow vector of a frame is computed with ref-
erence to another frame. We use the optical flow vec-
tors for the segmentation of the reference image into
different motion regions corresponding to the natural
scene. We use divergence of the flow vector and the
gradient of magnitude of the flow vector of the image
at every point in the image to construct the feature
vector. The divergence of a vector field is the rate
at which flux exits a given region of space. Gradient
represents the magnitude and direction of maximum
variation of the scalar field (image).
Let
P
i
(x,y) = (
−→
V
x
,
−→
V
y
,
−→
∇ .
−→
V ,
−→
∇
x
|
−→
V |,
−→
∇
y
|
−→
V |) (1)
P
i
(x,y) = (p
1
,p
2
,p
3
,p
4
,p
5
) (2)
where P
i
(x,y) is a vector at a given pixel location
(x,y) for i
th
frame.
Here p
1
and p
2
are the optical flow vectors at (x,y).
After applying the vector operations on the flow vec-
tors, we obtain their divergence and gradient of flow
vectors for every pixel in the image. p
3
corresponds
to the divergence and p
4
and p
5
represent the gradi-
ents of magnitudes of the vectors of the given frame
(image) as shown in Equation 1.
For better classification, we need to add finite tem-
poral support using information from successive im-
ages. Consequently, we take about 5-6 frames from a
part of a 5 second video. We take the variance of di-
vergence of flow vectors, and gradient of magnitude
of flow vector, as in Equation 1, on each pixel across
the video frames in temporal window. An intuitive
reason behind using variance of divergence and gradi-
ent is justified by the difference in variations in their
values for different regions. For static regions, the
variation will be negligible because the magnitude of
velocity vectors in these regions will be close to zero
over the temporal support of about 5 seconds as in the
example shown in the Fig. 3. Non-repetitive motion
regions will have a high variation due to their con-
tinuous variation in movement and repetitive motion
regions will have a continuous but a smaller variation
in their velocity vectors.
Let Q be the feature vector that is used in the un-
supervised learning algorithm. There is a significance
behind bringing Q vector in Equation 3 into logarith-
mic domain . The formation of margin for three re-
gion clustering takes place better in logarithmic do-
main as it can be clearly seen from Fig. 3(b) and 3(f).
Let
Q
i
(x,y) = (q
1
,q
2
,q
3
,q
4
,q
5
), (3)
where q
j
= log(a + σ
2
(p
j
)), j = 1, 2, 3, 4, 5,
where σ
2
is the variance of a feature vector across
the space-time volume over finite time support, and a
is a very small non-zero, positive constant (a=0.1 for
Fig. 3). We include this constant to avoid condition
when the variance becomes close to zero (especially
in static regions) as the logarithm value may tend to
infinity. This parameter is purely experimental, we
varied its value from 0.01 to 1 for different cases in the
Fig. 4 depending on the corresponding segmentation
output.
The number of pixels in a low resolution image
are high which make optimization at pixel level quite
difficult. Superpixels group a set of neighbouring pix-
els which share similar properties. Using superpixels,
we preserve the boundaries of the objects in the im-
age and it will help in reducing the effective number
of pixels in the image (Ren and Malik, 2003). This
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
704

(a) (b) (c) (d) (e) (f)
Figure 3: (a) One among the input frame, (b) 3 class Segmentation using K-means clustering using V
x
and V
y
of
−→
V in Equation
1, (c) using LDOF on pixels lead to noisy segmentation, (d) result of applying superpixel on reference image, (e) expected
result (ground truth), (f) segmentation result using the proposed algorithm. (white - repetitive, black - non-repetitive, gray -
static).
increases the calculation efficiency during the execu-
tion of program for motion classification in a scene.
The superpixel based approach improves accuracy in
classification by finding features for each superpixel
rather than for individual pixels. When we plot the
divergence of optical flow vector field, we may get
noisy results as observed in Fig. 3(c). Superpixels
help in the suppression of noise as we take the aver-
age of the feature vectors estimated within a super-
pixel and this operation helps in improving the accu-
racy while performing segmentation of the scene.
Figure 4: Various datasets and segmentation results (white
- repetitive, black - non-repetitive, gray - static).
Every pixel within a superpixel is uniformly as-
signed a particular feature vector. The individual ele-
ments are calculated as the mean of the feature vector
values corresponding to the pixels present in a super-
pixel. This feature vector is used in the unsupervised
learning algorithm that clusters the feature points into
three different classes. In our experiment, we use K-
means clustering algorithm for testing the designed
feature vector. This enables us in the segmentation of
the scene according to the reference image.
Addition of more information to the feature vec-
tor by including divergence for each set of flow vec-
tor obtained from more frames improves the result of
classification. Feature vector comprises of function
of variance of optical flow vectors, divergence of flow
vectors, and gradients of its magnitude. This make
the flow vector into 5-dimensional motion flow vec-
tor(5DMFV). Optical flow vectors obtained from dif-
ferent methods are compared by analysing the resul-
tant classification with the ground truth image created
for the scene (see Fig. 3). Applying K-means cluster-
ing for 3 clusters on this 5DMFV categorises into 3
classes- static, repetitive and non-repetitive motion, if
present in the scene. As seen in Fig. 3, certain scenes
have significant variation in motion from static and
small regular motion to random motion. This is the
reason that interests us to group the entire 5DMFV
space into 3 clusters.
4 RESULTS
Fig. 5 depicts the comparison of our approach with
one of the recent works in motion segmentation based
on point trajectories. Column-1 of the Fig. 5 has a
frame extracted from a video of a real world scene.
Figures in column 2 and 3 are the results obtained
from the binaries of motion segmentation approach of
Ochs et al (Ochs and Brox, 2012). We have presented
the results of our proposed approach with just optical
flow vector as feature vector in the column-4 while
column-5 shows results obtained using 5DMFV. In
these scenes, we have different kinds of motion like
rotational motion of wheel, moving hand, train, foun-
tain, trains and among others.
As seen from the first row, the reference image
has static background, repetitive motion of wheel and
non-repetitive motion of hand. Although (Ochs and
Brox, 2012) approach is able to segment the hand
clearly, the wheel segmentation is not perfect. Fig.
5(d) shows that the segmentation result leads to many
errors. Fig. 5(e) depicts the results of the proposed
approach which is able to segment the reference im-
age into three regions comprising of static, repetitive
and non-repetitive motions. Similarly, we have the
fountain scene with repetitive fountain and non repeti-
MotionCharacterizationofaDynamicScene
705
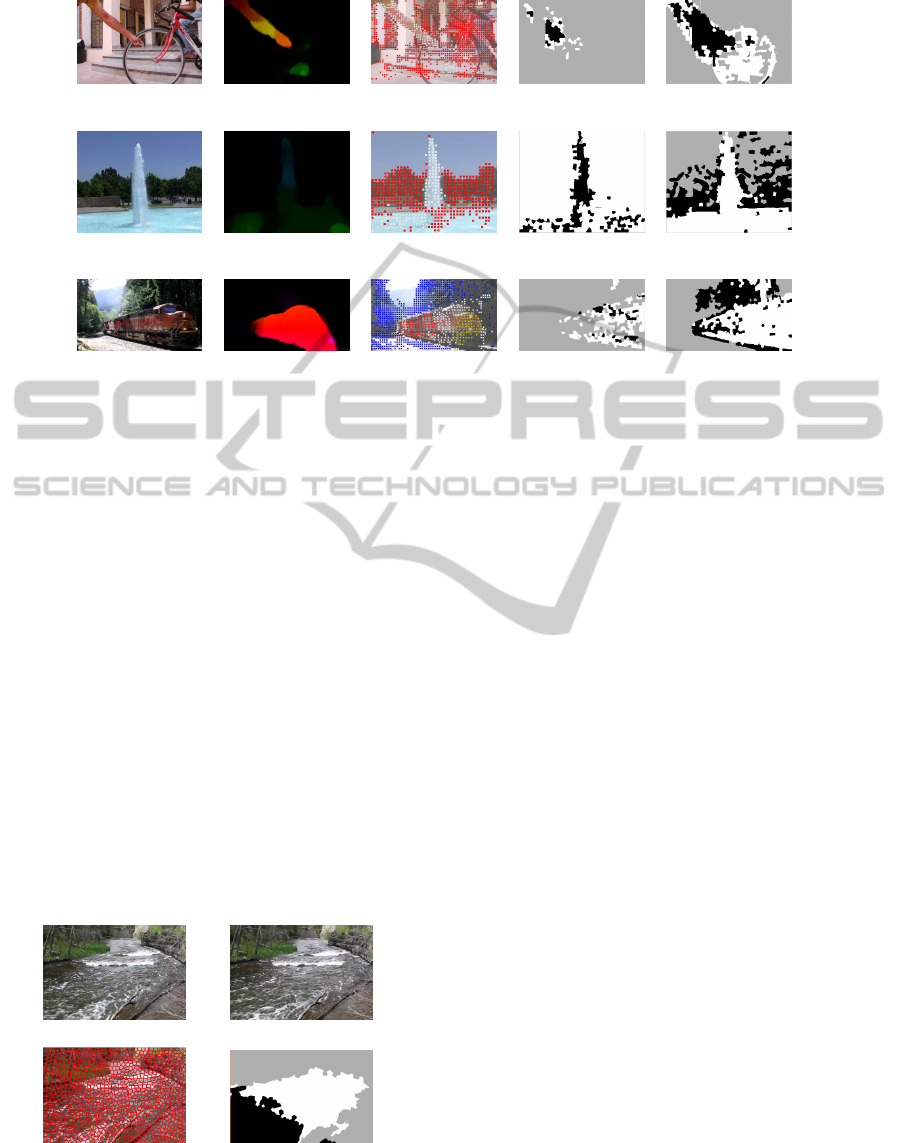
(a) (b) (c) (d) (e)
(f) (g) (h) (i) (j)
(k) (l) (m) (n) (o)
Figure 5: (a, f, k) Real video sequence of Wheel, Fountain and Train, (b, g, l) Result obtained from binaries from (Ochs and
Brox, 2012), (c, h, m) Trajectory clustering on video sequence from Ochs et al (Ochs and Brox, 2012), (d, i, n) Results of
proposed approach using Lucas and Kanade optical flow vectors as feature vectors, (e, j, o) Proposed Approach result using
5-dimensional feature vector. Here, white depicts repetitive motion, black depicts non-repetitive motion and gray indicates
static region in the scene
tive far off trees movement. Also we consider the rail-
way scene with constant locomotive motion and irreg-
ular tree movement due to the emitted smoke. In the
fountain scene, the work by (Ochs and Brox, 2012)
seems to perform better with less erroneous regions
in the trajectory clustering image when compared to
Fig. 5(j) which segmented three parts with some er-
rors. However, proposed approach makes appropri-
ate segmentation in the railway scene with white as
repetitive locomotive motion, black as tree movement
and gray as the static region as shown in Fig. 5(o) in
comparison to Fig. 5(l, m). We conclude from Fig.
5 that the proposed approach leads to promising re-
sults. Thus, we bring out a visual comparison of the
above methods. Their quantitative comparison is not
possible because state of the art method deals with
segmentation of static and dynamic parts of a scene.
(a) (b)
(c) (d)
Figure 6: (a) and (b) Consecutive frames of river scene. (c)
the result of applying superpixel on reference image, and
(d) segmentation result using the proposed algorithm (white
- repetitive, black - non-repetitive, gray - static).
We apply our algorithm to a set of five consecu-
tive frames of the wheel scene. In Fig. 3, the wheel
exhibits repetitive motion while the arm exhibits non
repetitive motion. One of the frames of the video used
is shown in Fig. 3(a). We use the first image in our set
as the reference image. Fig. 3(c) shows that the seg-
mentation at pixel level is noisy. In the reference im-
age, super pixels are calculated as shown in Fig. 3(d)
and these superpixels are employed for the segmen-
tation. Upon application of our algorithm, the result
shown in Fig. 3(f) is obtained which matches closely
with the approximate ground truth image (Fig. 3(e)).
Fig. 4 depicts two representative images from each
dataset that were used and their corresponding out-
puts.
When we apply the proposed algorithm on the
river dataset (Fig. 6), we observe that the distant part
of the river is classified as static, nearer part is clas-
sified as non-repetitive and the middle part is clas-
sified as repetitive. For a pinhole camera, the 2D
perspective projection of the camera is provided by
( f X/Z, fY /Z), where f is the distance of optical cen-
ter from image plane. Z is the depth of the scene. So
when object is far, depth variations are not felt and
the projection becomes orthographic projection. In
this case, the 3D scene point is projected as (X,Y ).
When object is near, depth variation is appreciable
and the projection becomes strong perspective pro-
jection. In cases where the depth is slightly more,
the projection becomes weak perspective projection.
Therefore the variation in depth within the same ob-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
706

ject may result in different classifications of its parts.
Fig. 6(d) shows that the distant region of the river is
classified as static region while the nearer region of
the river is classified as having non-repetitive motion
and rest of the region is classified as having repetitive
motion.
5 CHALLENGES
There may be scenes that have very large ob-
ject displacements where both normal optical flow
method and LDOF algorithm yield less accurate re-
sults. Though the scene may contain regions of non-
repetitive motion, they may get unidentified because
of its absence in the sampled images. The algorithm
may fail, for instance, when there is a lightning in
the scene. This is expected as optical flow algorithm
works under the assumption of constant brightness.
Change of lighting condition in the scene leads to
error in the segmentation. Optical flow algorithms
have its dependency on the brightness value at the
pixel location. Segmentation problems arise in such
exceptional cases of complex natural scenes. Usage
of unsupervised learning such as K-means clustering
gives rise to the problem of different partitions result-
ing in different clusters.
6 FUTURE WORK
Classification of motion in a dynamic scene has a
bright research future when the scene is affected by
drastic illumination changes. In some of the previ-
ously considered examples, we saw that the illumi-
nation of the scene keeps fluctuating which leads to
bad results upon implementation of the proposed al-
gorithm (Fig. 4). There may be problems due to vari-
ations in camera parameters such as aperture, focal
length, and shutter speed. We plan to improve the pro-
posed approach for use in video synopsis and motion
magnification in future.
7 CONCLUSIONS
The proposed approach segments the scene into static,
repetitive, and non-repetitive motion regions effective
for a sampling rate between 1 per 30 frames to 1
per 5 frames. For scenes containing large displace-
ments, LDOF gives better results. The approach fails
in the scenes where lighting condition changes as the
brightness constancy assumption does not hold true.
Also when the depth of the object varies widely, we
face difficulty in classification. We hope to customize
this approach to other computer vision applications
involving segmentation of different objects based on
the motion they exhibit.
REFERENCES
Black, M. J. and Anandan, P. (1996). The robust estima-
tion of multiple motions: Parametric and piecewise-
smooth flow fields. Computer Vision and Image Un-
derstanding, 63(1):75 – 104.
Brox, T. and Malik, J. (2011). Large displacement optical
flow: descriptor matching in variational motion esti-
mation. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 33(3):500–513.
den Bergh, M. V. and Gool, L. J. V. (2012). Real-time stereo
and flow-based video segmentation with superpixels.
In WACV, pages 89–96. IEEE.
Derpanis, K. G. and Wildes, R. (2012). Spacetime tex-
ture representation and recognition based on a spa-
tiotemporal orientation analysis. Pattern Analysis
and Machine Intelligence, IEEE Transactions on,
34(6):1193–1205.
Horn, B. K. and Schunck, B. G. (1981). Determining optical
flow. Artificial intelligence, 17(1):185–203.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo
vision (ijcai). In Proceedings of the 7th Interna-
tional Joint Conference on Artificial Intelligence (IJ-
CAI ’81), pages 674–679.
Ochs, P. and Brox, T. (2012). Higher order motion models
and spectral clustering. In Computer Vision and Pat-
tern Recognition (CVPR), 2012 IEEE Conference on,
pages 614–621. IEEE.
Peterson, B. (2010). Understanding Exposure: How to
Shoot Great Photographs with Any Camera. Amphoto
Books.
Pritch, Y., Rav-Acha, A., and Peleg, S. (2008). Nonchrono-
logical video synopsis and indexing. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
30(11):1971–1984.
Ren, X. and Malik, J. (2003). Learning a classification
model for segmentation. In Computer Vision, 2003.
Proceedings. Ninth IEEE International Conference
on, pages 10–17 vol.1.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive
background mixture models for real-time tracking.
In Computer Vision and Pattern Recognition, 1999.
IEEE Computer Society Conference on., volume 2.
IEEE.
Wadhwa, N., Rubinstein, M., Durand, F., and Freeman,
W. T. (2013). Phase-based video motion processing.
ACM Trans. Graph. (Proceedings SIGGRAPH 2013),
32(4).
MotionCharacterizationofaDynamicScene
707
