
GPU based Parallel Image Processing Library for Embedded Systems
Mustafa Cavus, Hakkı Doganer Sumerkan, Osman Seckin Simsek, Hasan Hassan,
Abdullah Giray Yaglikci and Oguz Ergin
TOBB University of Economics and Technology, Ankara, Turkey
Keywords: GPGPU, OpenCL, Embedded Systems, Image Processing, Parallel Computing.
Abstract: Embedded image processing systems have many challenges, due to large computational requirements and
other physical, power, and environmental constraints. However recent contemporary mobile devices include
a graphical processing unit (GPU) in order to offer better use interface in terms of graphics. Some of these
embedded GPUs also support OpenCL which allows the use of computation capacity of embedded GPUs
for general purpose computing. Within this OpenCL support, challenges of image processing in embedded
systems become easier to handle. In this paper, we present a new OpenCL-based image processing library,
named TRABZ-10, which is specifically designed to run on an embedded platform. Our results show that
the functions of TRABZ-10 show 7X speedup on embedded platform over the functions of OpenCV on
average.
1 INTRODUCTION
Today's GPUs can use hundreds of parallel
processor cores and can execute thousands of
parallel threads. Their performance exceeds the
performance of CPUs in arithmetic throughput and
memory bandwidth. In this trend, OpenCL aims to
make programming many core GPUs easier for
programmers. OpenCL is a platform independent
open standard which is able to run on different
platforms of different vendors. OpenCL supports the
use of many computation resources like embedded
GPUs, CPUs, FPGAs or any other OpenCL enabled
computation units.
OpenCL fits well for a wide spectrum of
applications and one of the common usage area is
image/video processing. One of the most important
challenges in the field is the high computation
requirement to achieve high accuracy and real-time
processing. With increasing video resolution and
data frame sizes, it is getting harder to achieve real-
time performance.
GPGPU offers the designers an option of high
data-parallel computation. Most of the image
processing algorithms fit well on this approach. Also,
they can benefit the single instruction multiple data
(SIMD) architecture of GPUs and can be effectively
parallelized. However, it is not possible to say that
all image processing algorithms fit well with data
parallel approach, and they cannot be ported to
GPUs with significant speedups. Although image
processing algorithms are well suited to massively
parallel architecture of GPUs, some of them are
failed to achieve performance speedup. In addition
to all of these, embedded architecture limitations
give additional restrictions and this makes harder to
port certain functions to GPU.
In this paper we present an image processing
library that is compatible with embedded devices.
We chose OpenCV as a reference model and
compared our library both in functionality and
performance with OpenCV, which is one of the most
popular and efficient image processing toolkits. To
create a library that is suitable for embedded
platforms and able to compete with OpenCV, we
implemented key algorithms of image processing.
While implementing these algorithms, our main
purpose was to accelerate these algorithms on
GPGPU using OpenCL.
2 RELATED WORK
The most common applications on GPGPU are
image processing applications. Image processing
operations perform the same computation on many
pixels; they can exploit the massive data parallelism
and outperform their CPU implementations.
234
Cavus M., Sumerkan H., Simsek O., Hassan H., Yaglikci A. and Ergin O..
GPU based Parallel Image Processing Library for Embedded Systems.
DOI: 10.5220/0004859902340241
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 234-241
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

The starting point of this research area was not
based on GPGPUs, but based on regular GPUs on
embedded platforms. First approaches include using
OpenGL and DirectX APIs to program GPU’s
shader cores and programmable pipeline using
GLSL (Khronos Group, 2012) (Khronos Group,
2004). Especially using OpenGL ES 2.0 on
embedded platforms to increase performance of the
image processing algorithms was a hot topic. The
invention of CUDA and OpenCL maximized the use
of GPGPUs for image processing and other
applications.
2.1 GPU Model
General-purpose GPU model was achieved using
programmable shader infrastructure. GLSL is the
shader programming language which enables
implementing not only graphics shader code, but
also general purpose computation. A survey of
general-purpose computation on GPUs is described
in (Owens, J. 2007).
Singhal et al. implemented many image
processing, color conversion and transformation
algorithms and applications like Harris corner
detection and real-time video scaling for handheld
devices (Singhal, N. 2010). They used OpenGL ES
2.0 (OpenGL for Embedded Systems) (Munshi, A.
2008) and its texture hardware to achieve their goal.
There are other open source projects like
GPUCV (Farrugia, J-P. 2006), MinGPU (Babenko,
P. 2008) and OpenVIDIA (Fung, J. 2005). While
GPUCV and MinGPU support using GPU and
GPGPU functionalities simultaneously, OpenVIDIA
can only use CUDA and implements a set of useful
image processing functions.
2.2 GPGPU Model
Changing the computation and programming
capabilities of GPUs, NVidia developed Compute
Unified Device Architecture (CUDA) (Lindholm, E.
2008) and made their GPUs, GPGPUs. GPGPUs
support Single Instruction Multiple Thread (SIMT)
architecture. SIMT architecture allows one
instruction used by many threads and these threads
can process multiple data, resulting in excessive
performance gain. GPGPUs have been used
extensively to exploit this performance gain in
image processing applications. While some papers
implement image processing functions from scratch
(Yang, Z. 2008), some of them are implemented
over existing libraries (Farrugia, J-P. 2006) (Kong, J.
2010). There is also some research on particular
image processing algorithms. In (Luo, Y. 2008), Luo
et al. used CUDA to enhance the speed of canny
edge detection algorithm.
OpenCL is the standardized version of general
purpose computing platform (Khronos OpenCL
Working Group. 2008) (Munshi, A. 2011). Unlike
CUDA, OpenCL works on various processors
including embedded processors, DSPs and FPGAs
(Czajkowski, T. 2012). OpenCL and CUDA have
little differences in coding and capability as shown
in (Karimi, K. 2010) (Fang, J. 2011) (Du, P. 2012).
3 OpenCL EMBEDDED PROFILE
3.1 OpenCL Programming Model
OpenCL is an API which enables heterogeneous
parallel programming on various devices like GPUs,
DSPs, FPGAs and even CPUs. OpenCL
specification is maintained by Khronos Group, but
many vendors contribute to the improvement of this
specification (Khronos OpenCL Working Group.
2008). OpenCL programming model consists of one
host and one or more compute devices as shown in
Figure 1.
Host part runs the C/C++ part of the code
(OpenCL supports both C and C++), and
communicates with the compute devices. The code
that runs on compute units is called kernel and
written in OpenCL C language, which is a subset of
regular C language with functional extensions.
Kernels can be compiled just-in-time or the program
can read the pre-compiled device specific binary and
execute this binary on compute units. These kernels
are executed as single program multiple data which
are grouped by 1D, 2D or 3D set of work items.
Work items are grouped together into work groups.
Work items can be executed in a single instruction
multiple data (SIMD) fashion. The processors
hierarchy and memory hierarchy is shown in Fig. 2.
There can be multiple multiprocessor
infrastructures which have multiple processors. In
Figure 2, SP means streaming processor which is the
building block of compute device. SPs are grouped
into Multiprocessors.
Multiprocessors have their own register files and
their own on chip cache which is called local
memory in OpenCL and shared memory in CUDA.
Device memory is the global memory of the
compute unit that consists of RAM of the device.
Device memory may include specific parts
called texture cache and constant cache. These
memory types are not mandatory, but if they exist,
GPUbasedParallelImageProcessingLibraryforEmbeddedSystems
235
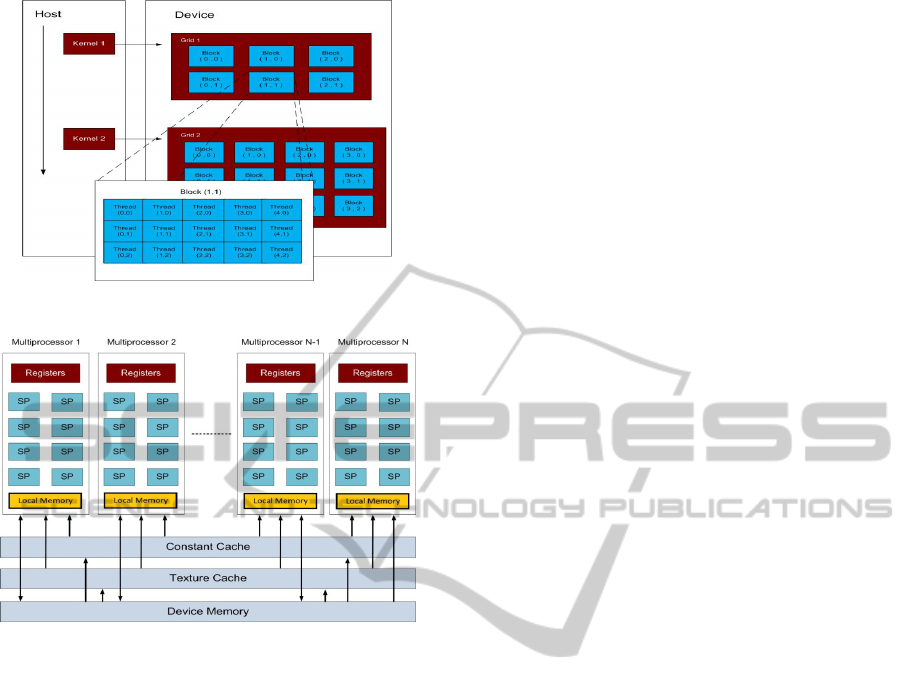
Figure 1: GPGPU Programming Model.
Figure 2: GPGPU Processor and Memory Hierarchy.
they are extremely useful.
3.2 OpenCL Programming
on Embedded Profile
Unlike other Khronos standards, OpenCL does not
have an ES (embedded systems) specification, but it
has embedded profile which is a subset of OpenCL
specification (Khronos OpenCL Working Group.
2008). Embedded profile for example, does not have
to support double, long or half types, rounding
modes can be moderate like round to zero, 3D image
support is not mandatory and such.
Even though OpenCL has an embedded profile
specification, there were not available devices or
manufacturers until recently. There was some effort
to be able to implement embedded profiled OpenCL,
but it was not as efficient as it should be without the
hardware support (Leskela, 2009). Using embedded
system GPUs which support OpenGL ES 2.0 was
the main idea among these researches. OpenGL ES
2.0 enables programmable shaders and with
OpenGL interface, useful functions can be
implemented with extensive effort (Cheng, K. 2011)
Lopez, M. (2011).
4 TRABZ-10 IMAGE
PROCESSING LIBRARY
TRABZ-10 is an open source image processing
library for embedded platforms with OpenCL
support. Development is done in both Linux and
Windows environment but testing of the functions is
done using Vivante GC2000 GPU on Freescale
i.Mx6q sample board. Vivante GC2000 board is
considered a base and implementation and
optimizations are done for this particular product.
Even though this product is very powerful and
efficient, it has downsides because of the embedded
profile constrictions. There are little small size of
local memory on the device and very limited number
of registers. Local memory is not on chip, but a part
of global memory, so using it does not increase
performance. Also it has no usable texture memory
and support for OpenCL images is limited.
Considering these bottlenecks, we developed an
image processing library for embedded systems. The
comparisons of the implemented functions are done
using OpenCV.
TRABZ-10 image processing library functions
are grouped in 6 major sections. These are Matrix
operations, filtering, morphology, transformation,
feature detection and conversion.
4.1 Matrix Operations
In matrix operations section there exist the basic
matrix operations such as matrix addition,
subtraction, multiplication, inversion, etc. All of the
matrix operation functions take advantage of GPU,
except a small set. Min, max functions are
implemented on CPU side due to considerable
amount of branching. These algorithms also
implemented by reduction but the performance
results showed no gain over OpenCV.
4.2 Filtering Functions
Filtering functions refer to a class of algorithms that
are mostly about the convolution operations with
different filters. In this group we have implemented
11 functions including laplacian, sobel, scharr,
median, bilateral, gaussian, box, normalized box and
blur filters. These filters are the most frequently used
filters in image processing.
Image filtering is one of the most considerable
fields for OpenCL because many of the image
filtering algorithms is the perfect fit for parallel
processing in memory access patterns and
mathematical complexity. To utilize the benefits,
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
236

especially the massively parallel nature of OpenCL,
best way is to divide image into blocks and assign
these blocks to threads. Therefore, each thread is
responsible for accessing global memory, copying
pixel data to shared memory if it is needed and
computing the wanted result for a single pixel.
4.3 Morphological Operations
Morphological operations are a subset of image
filtering. The difference between regular filters and
morphological operations is, filters multiply and add
the values in the filter range and finds out the
necessary pixel value, while morphological
operations use widely known "fit", "hit" and "miss"
functions over a structuring element.
The main functions of morphology are erosion
and dilation. Erosion is the intersection between
image and structuring element and dilation is the
union between them. These functions are more
difficult to implement than filter functions due to the
comparison and branching. Since morphological
operations are applied on binary images,
performance loss due to the branching can be
compensated.
4.4 Image Transformation
In this section there exist four image transform
functions which convert an image from one domain
to another. One of these functions is DCT (discrete
cosine transform) and one other function is DFT
(discrete Fourier transform). The other two functions
are inverse DCT and inverse DFT.
Discrete cosine transform function calculates a
matrix which is represented as a sum of sinusoids of
varying magnitudes and frequencies from the given
image with the shown in formula (1).
(1)
Discrete Fourier transform function calculates a
matrix which is represented as a sum of complex
exponentials of varying magnitudes, frequencies,
and phases from the given image. Discrete Fourier
transform is computed using the FFT (fast Fourier
transform) algorithm which is a fast way to compute
DFT. Mathematical representation of FFT is shown
in formula (2).
(2)
4.5 Geometric Transformations
This section consists of nine geometrical
transformation functions which perform a
deformation operation on the pixel grid, and map the
deformed grid to the destination image. This
mapping is done from destination to source in order
to avoid sampling artifacts. It means that instead of
computing destination coordinates for each pixel in
the source image, source coordinates are computed
for each pixel in the destination image. In this way,
every pixel in the destination image is covered and
each of them is visited only once.
4.6 Color Conversion
This group of functions convert input image from
one color space to another color space. Color
conversion kernels are low complexity kernels with
no data dependency. Since different color spaces can
be useful for different kind of image processing
algorithms and video coding/decoding techniques,
they need to be accelerated. They also could be
ported to the GPU well, because these conversion
functions exhibit significant amount of data
parallelism. In TRABZ-10 we have implemented
commonly used color conversion kernels such as
YUV, HSV, LUV, XYZ to RGB and their reversed
conversions. RGB to binary and RGB to grayscale
functions are also implemented in this group of
functions.
4.7 Feature Detection
In this group of functions we have implemented 6
different algorithms. These algorithms give the
features of images as a lines, corners or circles. We
have implemented Canny and Hough (Line)
transformation to detect edges, Harris, Eigen vector
and Eigen value to detect corners and Circle Hough
transformation to detect circles of the image.
5 IMPLEMENTATION
STRATEGIES
In this section we will discuss about the general
OpenCL coding strategies and optimizations. We
first implemented the naïve kernels and then tried to
vectorize the code. The use of local memory was
very limited because Vivante GC2000 has as small
as 1 KB of local on-chip memory for general
purpose computation. After that point we passed
GPUbasedParallelImageProcessingLibraryforEmbeddedSystems
237

over algorithms to find algorithm dependent
bottlenecks and exploit parallelism even further. We
also tried connecting kernels to reduce CPU-GPU
data transfers and fusing multiple kernels into one
kernel.
Increasing the memory bandwidth was the first
thing to do to optimize the library. Coalescing
memory accesses and avoiding bank conflicts while
using shared memory was a high priority
optimization strategy.
Vector data types are supported for char, uchar,
short, ushort, int, uint, float, long, and ulong in
OpenCL. The contribution of using vector sizes to
the performance is architecture dependent. Certain
GPGPU architectures are more efficient in using
vector data types in calculation of the operands and
some are not. Since GC2000 has well-working
vector units, exploiting this feature increases
performance gain.
Since the CPU and GPU are on the same chip in
Freescale i.Mx6q processor, data copy between CPU
and GPU is not necessary; they access the same off-
chip RAM. This strategy is also used in this library
to avoid performance degradation caused by
memory copy operation.
The last strategy in our work was connecting
different kernels. We developed a framework that
connects different kernels and reduces the CPU-
GPU data transfers. Every kernel output is given to
the input of another one, so data transfer and system
call overhead can be discarded. As a future work, we
will apply this framework for whole library.
Kernel connection gives an average of 3x speed
up over sequential kernel execution as can be seen in
Figure 3.
Figure 1: Simple and Medium Kernels.
6 LIMITATIONS OF EMBEDDED
PROFILE
There are three major problems we encountered with
embedded profile; small register size, small local
memory and limited instruction memory. GC2000
has 64 32-bit registers on each core, 1 KB of local
memory and it has a limit of 512 instructions per
kernel. Since it has these memory limitations, using
registers and local memory is really challenging
because of the register spill. When registers are not
enough, each core holds the register data on global
memory, which is off-chip and really slow, and this
degrades performance. In GPGPU model model
each core hosts a large number of thread groups and
every thread group accesses memory. Between these
accesses, thread groups wait for the completion of
the previous memory access. Between these waits,
scheduler switches to another active thread group.
So this is why limited register size also limits the
total active thread group count and this limits the
scheduler’s efficiency of memory latencies.
The other major problem was limited instruction
memory. Since embedded GPUs have a limited
instruction memory, larger kernels can exceed the
instruction limit. GC2000 has an instruction limit of
512 per kernel and this prevents implementing
complex and large algorithms. In our library the
most challenging algorithm is FFT and the limited
instruction memory of GC2000 is one of the reasons
behind this challenge.
7 RESULTS
This section covers the experimental results for
transformation, filtering and matrix functions. Our
test environment is an embedded platform which has
a Quad Core ARM Cortex A9 CPU and Vivante
GC2000 GPU. Specifications of the environment
can be seen in Table 1.
Table 1: Embedded Platform Specifications.
Embedded Platform
GPU
Type
GPU
Clock
GPU
Cores
CPU
Type
CPU
Clock
Memory
Clock
GC2000
600
Mhz
4
Cortex
A9
1200
Mhz
533 Mhz
All of the results that are shown on the figures are
kernel execution times in seconds. OpenCV
functions are executed on ARM Cortex A9 and
TRABZ-10 results are from Vivante GC2000
GPGPU. As it is seen from the figure, TRABZ-10
has better results in all filtering functions with
different image sizes than OpenCV. It can also be
seen that speed up of functions increases with bigger
image sizes.
Filtering function results showed that TRABZ-10
is up to 7X faster than OpenCV on our embedded
platform. Figure 4 shows the achieved speedups
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
Simple Medium Simple Medium
FunctionExecution KernelExecution
Connected
Sequential
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
238

against OpenCV in filtering functions.
Figure 2: Execution Times of Filtering Functions with
Different Image Sizes on Embedded Platform.
Transformation functions results showed that
TRABZ-10 is up to 8x times faster than OpenCV on
our embedded platform. Figure 5 shows the
execution times on our embedded platform.
Figure 3: Execution Times of Transformation Functions
with Different Image Sizes on Embedded Platform.
Figure 4: Execution Times of Matrix Operations on
Embedded Platform.
As the figure shows the most gained speed-up is
over Warp Perspective and Warp Affine functions.
On other functions execution times are relatively
close to the OpenCV execution times.
Figure 6 shows the execution times of another
important set of operations, matrix operations, which
is used widely on image processing. From the figure,
it can be seen that TRABZ-10 has a better
performance on almost all of the functions. It also
has a better average speed up than filtering and
transformation function groups. Since some of the
matrix functions are recursive by nature, these
functions are implemented on CPU side.
8 SAMPLE APPLICATION: FACE
DETECTION
To test our library, we implemented a naive face
detection application. To be able to compare the
results, we both implemented an OpenCV version
and TRABZ-10 version with the same algorithm.
The proposed method is based on color and
feature-based face detection. The algorithm can
detect human face under different lighting
conditions with high speed and high detection ratio.
The first step of the implementation consists of
average luminance calculation in YCbCr color space
to determine the compensated image. Chrominance
(Cr) is used to detect pixels containing human skin
color. To remove high frequency noise, a low pass
filter is applied. Separate human-skin regions are
labeled and corner points of each region is stored.
Regions that do not pass the height to width ratio are
eliminated. Then mouth detection is performed using
vertical based histogram for matrix (M) given in
formula (4). If mouth is not detected in region, it is
eliminated. Similar operation is done for eye
detection by determining vertical based histogram
for pixels whose luminance is slightly darker than
average skin-color. Regions that pass all these steps
are marked as a human face.
cos
.
0, 90
1,
(4)
An example of detection results are presented in the
Figure 7. Subjects considered in selected images
belong to several groups and lighting conditions. A
detected face is a correct detection with a small
amount of about 5% tolerance.
The detection ratio is computed by the ratio of
the number of correct detections in a gallery to that
of all the human faces in the gallery. The detection
rate is around 95%, if the images considered have
faces camouflaged with the background then the
face detection efficiency comes down to around 90%.
The reason for this decrease in the detection rate is
due to the reason that the face is merged with that of
the background.
0
1
2
3
512x512TRABZ‐10 512x512OpenCV 1024X1024TRABZ‐10
0
0,2
0,4
0,6
0,8
1
1,2
512x512TRABZ‐10 512x512OpenCV
1024X1024TRABZ‐10 1024X1024OpenCV
0
0,1
0,2
0,3
0,4
0,5
0,6
512x512TRABZ‐10 512x512OpenCV 1024X1024TRABZ‐10
1024X1024OpenCV 2048X2048TRABZ‐10 2048X2048OpenCV
GPUbasedParallelImageProcessingLibraryforEmbeddedSystems
239

Figure 7: Results of face detection with TRABZ-10.
Figure 8: Performance results of face detection.
On the performance side, TRABZ-10 has better
performance for different image sizes. As it can be
seen from the Figure 8, there are two different
results for image size 512x512. The reason behind
this difference is the number of features on these
images. Number of features on the image is the main
factor that affects the run time.
9 CONCLUSIONS
In this paper, we presented our open-source image
processing library which is implemented using
OpenCL. We developed base functionalities
including filter functions, transformations,
conversion and various matrix operations. Our
results show that, TRABZ-10 has speedups for most
of its functions compared to the embedded version
of OpenCV. This library constitutes as a start point
of image processing on embedded GPGPUs. It has
basic functionality for now, but it is open for
improvement. As a future work, we are planning to
get power results and test our library on different
embedded profiles that has OpenCL support and
adding more functionality to the library.
REFERENCES
Khronos Group. (2012). OpenGL Shading Language
Specification. Available: http://www.opengl.org/
documentation/glsl. Last accessed 25th April 2013.
Khronos Group. (2004). OpenGL ES 2.0 Specification.
Available: http://www.khronos.org/opengles. Last
accessed 25th April 2013.
Munshi, A (2008). OpenGL ES 2.0 Programming Guide.
Addison-Wesley Professional.
R. Marroquim, A. Maximo, Introduction to GPU
Programming with GLSL. Computer Graphics and
Image Processing (SIBGRAPI TUTORIALS), 2009
Tutorials of the XXII Brazilian Symposium on, vol.,
no., pp.3,16, 11-14 Oct. 2009.
Owens, J. (2007). A Survey of general-purpose
computation on graphics hardware. Computer
graphics forum. 26 (1), p80-113.
Singhal, N. (2010). Implementation and optimization of
image processing algorithms on handheld gpu. IEEE
International Conference on Image Processing.
p4481-4484.
Farrugia, J-P. (2006). GPUCV: A framework for image
processing acceleration with graphics processors.
IEEE International Conference on Multimedia and
Expo, 2006. p585-588.
Babenko, P. (2008). MinGPU: a minimum GPU library
for computer vision. Journal of Real-Time Image
Processing. 3 (4), p255-268.
Fung, J. (2005). OpenVIDIA: parallel GPU computer
vision. Proceedings of the 13th annual ACM
international conference on Multimedia. p849-852.
Lindholm, E. (2008). NVIDIA Tesla: A unified graphics
and computing architecture. Micro, IEEE. 28 (2), p39-
55.
Yang, Z. (2008). Parallel image processing based on
CUDA. IEEE International Conference on Computer
Science and Software Engineering. 3 (1), p198-201.
Kong, J. (2010). Accelerating MATLAB image processing
toolbox functions on GPUs. ACM Proceedings of the
3rd Workshop on General-Purpose Computation on
Graphics Processing Units. p75-85.
Luo, Y. (2008). Canny edge detection on NVIDIA CUDA.
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition Workshops,
CVPRW'08. p1-8.
Khronos OpenCL Working Group. (2008). OpenCL
Specification. Available: http://www.khronos.org/
registry/cl. Last accessed 25th April 2013.
Czajkowski, T. (2012). From OpenCL to high-
performance hardware on FPGAs. IEEE 22nd
International Conference on Field Programmable
Logic and Applications (FPL). p531-534.
Karimi, K. (2010). A performance comparison of CUDA
and OpenCL. arXiv preprint arXiv:1005.2581.
Fang, J. (2011). A comprehensive performance
comparison of CUDA and OpenCL. IEEE
International Conference on. Parallel Processing
(ICPP). p216-225.
0
0,5
1
1,5
2
TRABZ‐10
OpenCV
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
240

Du, P. (2012). From CUDA to OpenCL: Towards a
performance-portable solution for multi-platform GPU
programming. Parallel Computing. 38 (8), p391-407.
Munshi, A (2011). OpenCL programming guide. Addison-
Wesley Professional.
Leskela, J. (2009). OpenCL embedded profile prototype in
mobile device. IEEE Workshop on Signal Processing
Systems, (SiPS). p279-284.
Cheng, K. (2011). Using mobile GPU for general-purpose
computing–a case study of face recognition on
smartphones. IEEE International Symposium on VLSI
Design, Automatin and Test (VLSI-DAT). p1-4.
Lopez, M. (2011). Accelerating image recognition on
mobile devices using GPGPU. International Society
for Optics and Photonics IS&T/SPIE Electronic
Imaging. 1 (1), p78720R-78720R-10.
GPUbasedParallelImageProcessingLibraryforEmbeddedSystems
241
