
Dance Analysis using Multiple Kinect Sensors
Alexandros Kitsikidis
1
, Kosmas Dimitropoulos
1
, Stella Douka
2
and Nikos Grammalidis
1
1
Informatics and Telematics Institute, ITI-CERTH, 1st Km Thermi-Panorama Rd, Thessaloniki, Greece
2
Department of Physical Education and Sport Science, Aristotle University of Thessaloniki, Thessaloniki, Greece
Keywords: Body Motion Analysis and Recognition, Conditional Random Fields, Skeletal Fusion, Dance Analysis.
Abstract: In this paper we present a method for body motion analysis in dance using multiple Kinect sensors. The
proposed method applies fusion to combine the skeletal tracking data of multiple sensors in order to solve
occlusion and self-occlusion tracking problems and increase the robustness of skeletal tracking. The fused
skeletal data is split into five different body parts (torso, left hand, right hand, left leg and right leg), which
are then transformed to allow view invariant posture recognition. For each part, a posture vocabulary is
generated by performing k-means clustering on a large set of unlabeled postures. Finally, body part postures
are combined into body posture sequences and Hidden Conditional Random Fields (HCRF) classifier is
used to recognize motion patterns (e.g. dance figures). For the evaluation of the proposed method, Tsamiko
dancers are captured using multiple Kinect sensors and experimental results are presented to demonstrate
the high recognition accuracy of the proposed method.
1 INTRODUCTION
Dance is an immaterial art as it relies on the motion
of the performer’s body. Dance can convey different
messages according to the context, and focus on
aesthetics or artistic aspects (contemporary dance,
ballet dance), the cultural and social aspects (folk
dances, traditional dances), story telling (symbolic
dances), spiritual meanings (whirling dervishes), etc.
Especially traditional dances are strongly linked to
local identity and culture. The know-how of these
dances survives at the local level through small
groups of people who gather to learn, practice and
preserve these traditional dances. Therefore, there is
always a risk that certain elements of this form of
intangible cultural heritage could die out or
disappear if they are not safeguarded and transmitted
to the next generation.
ICT technologies can play an important role
towards this direction. Specifically, the development
of a system for the capturing, analysis and modelling
of rare dance interactions could significantly
contribute to this transfer of knowledge. However,
the main challenge of this task lies in the accurate
recognition of human body movements. Today, the
major advantages over earlier systems include the
ability to make more precise measurements with a
wider array of sensing strategies, the increased
availability of processing power to accomplish more
sophisticated interpretations of data, and a greatly
enhanced flexibility in the area of media rendering
(Aylward, 2006).
Depending on the degree of precision of the
captured motion and the constraints posed, different
sensing technologies are used. They can be broadly
divided into three main categories: optical motion
capture, inertial motion capture and markerless
motion capture. Optical motion capture is the most
accurate technique but it is also expensive and
constraining. Inertial motion capture is less accurate
and less stable. Finally, markerless motion capture
based on real-time depth sensing systems, such as
Microsoft Kinect, is relatively cheap and offer a
balance in usability and cost compared to optical and
inertial motion capture systems. To this end, this
approach is considered as the most promising one
and has attracted particular attention recently
(Alexiadis et al., 2011).
Existing approaches to human action and gesture
recognition using markerless motion capture
technologies can be coarsely grouped into two
classes. The first uses 3D depth maps / silhouettes
which form a continuous evolution of body pose in
time. Action descriptors, which capture both spatial
and temporal characteristics, are extracted from
those sequences and conventional classifiers can be
789
Kitsikidis A., Dimitropoulos K., Douka S. and Grammalidis N..
Dance Analysis using Multiple Kinect Sensors.
DOI: 10.5220/0004874007890795
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (IAMICH-2014), pages 789-795
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
used for recognition. The other category of the
methods extracts features from each silhouette and
model the dynamics of the action explicitly. Bag of
Words (BoW) are often employed as an intermediate
representation with subsequent use of statistical
models such as hidden Markov models (HMM),
graphical models (GM) and conditional random
fields (CRF) (Li et al., 2010); (Wang et al., 2012)
Another more recent approach is to use the
skeletal data acquired from the depth maps (Shotton
et al., 2011). The subsequent use of skeletal data for
action detection can be divided into two categories.
The methods of the first category are based on 3D
joints feature trajectories (Waithayanon and
Aporntewan, 2011). Those features are either joint
position, rotation data, or some transformation of the
above. They are mainly based on various Dynamic
Time Warping (DTW) variants, like multi-
dimensional time warping (MD-DTW) (ten Holt et
al., 2007). The recognition is based on the alignment
of the movement trajectories compared to the
‘oracle’ move which is being detected. Another
approach is to extract features from the whole
skeleton (histograms) and to use statistical models as
in the case of silhouette based methods (Xia et al.,
2012).
In this paper, we present a method for dance
capture, analysis and recognition using a multi-depth
sensors set-up and a skeleton fusion technique to
address occlusion problems and increase the
robustness of the skeletal tracking. Subsequently, we
propose the splitting of the skeleton into five
different parts, and the automatic generation of a
posture vocabulary (codebook) for each part.
Finally, a Hidden State Conditional Random Field
(HCRF) (Quattoni et al., 2004); (Wang et al., 2006)
is applied for the recognition of the dance figures
(motion patterns). Experimental results with real
Tsamiko dancer (Tsamiko is a traditional Greek
dance) have shown the great potential of the
proposed method.
2 SYSTEM OVERVIEW
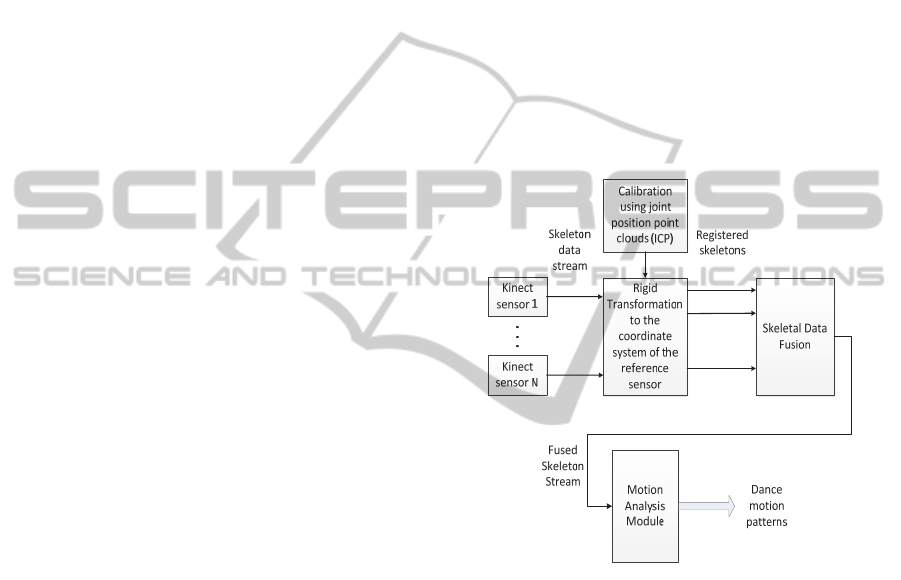
The flowchart of the data acquisition and motion
recognition process is presented in Figure 1. Several
Kinect sensors placed around the subject are used to
acquire skeletal animation data. Microsoft Kinect
SDK (Kinect for Windows, 2013), has been used as
a solution for skeletal tracking and acquisition. It
provides 3D position and rotation data (relative to a
reference coordinate system centred at the origin of
the sensor) of 20 predefined skeletal joints of a
human body. In addition a confidence level of the
joint tracking (low/medium/high) is provided per
joint. A skeletal fusion is proposed to combine the
data coming from multiple sensors onto a single
fused skeleton, which is then provided to the Motion
Analysis Module. Specifically, the skeleton is split
into five body parts (torso, left/right hand, left/right
foot), which are then transformed to allow view
invariant posture recognition. The next step is to
recognize each body part posture appearing in a
frame, based on a predefined vocabulary of postures,
obtained from a set of training sequences. Finally,
body part postures are combined into body posture
sequences and an HCRF is used to recognize a
motion pattern (e.g. a dance move) from a
predefined set of motion patterns from which the
HCRF was previously trained.
Figure 1: System overview.
2.1 Calibration
In order to improve the robustness of skeleton
tracking provided by the Microsoft Kinect SDK, to
reduce occlusion and self-occlusion problems and to
increase the area of coverage, multiple Kinect
devices were used. Prior to fusion, skeletal data from
all sensors have to be transformed to a common
reference coordinate system. One sensor is selected
as the reference sensor providing the reference
frame. A calibration procedure is then required to
estimate the transformations between the coordinate
systems of each sensor and the reference sensor. The
proposed calibration procedure does not require any
checker boards or similar patterns. Instead, the only
requirement is that a person needs to be visible from
multiple sensors, whose FOV’s need to partially
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
790
overlap. The skeleton joint positions are then fed
into the Iterative Closest Point algorithm (Besl and
McKay, 1992) to estimate the rigid transformation
(Rotation-Translation) that minimizes the distance
between the transformed positions in the reference
frame. This transformation is then used to register
the skeletons acquired from each sensor in the
reference coordinate system. The implementation of
ICP algorithm found in the Point Cloud Library
(PCL, http://pointclouds.org/), (Rusu, 2011) was
used.
Since the skeleton frame data are sparse, each
containing at most 20 points, and the estimation of
the joint positions can be erroneous, the calibration
procedure is iterated until two convergence criteria
are both met. The first criterion is that the number of
joints tracked with high confidence on both devices
needs to be higher that a threshold T
joints
. The higher
this number is the better the expected accuracy of
the calibration. The second criterion is that the
fitness score of the ICP algorithm needs to be lower
than a threshold T
ICP
. These thresholds can be
adjusted to accommodate various setups and
recording conditions.
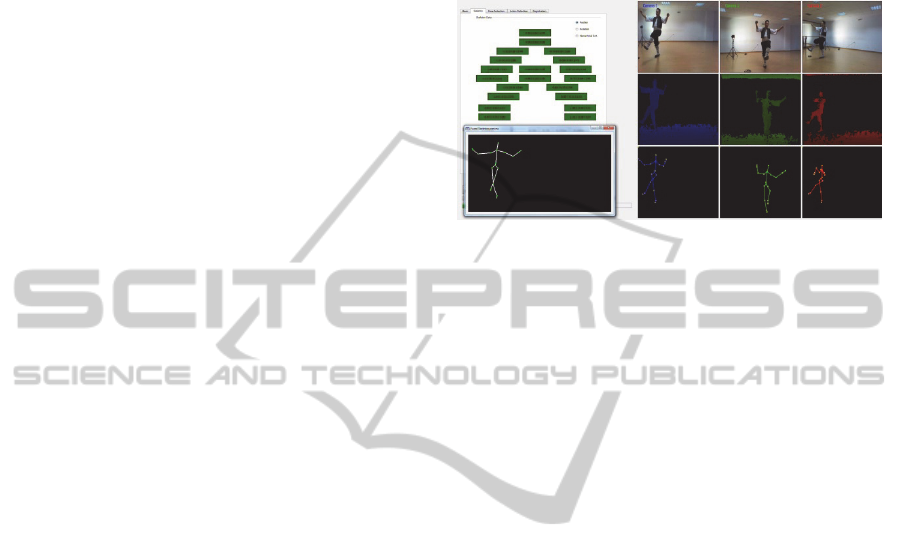
2.2 Skeleton Fusion
Once all sensors are calibrated, skeleton registration
is performed, i.e. the representation of each skeleton
is transformed to the reference coordinate system.
This is accomplished by multiplying the skeleton
joint positions obtained from each sensor by the
corresponding RT matrix, estimated in the
calibration process. Then, a skeletal fusion
procedure is used to combine these registered
skeletons into a single skeleton representation
(Figure 2).
Specifically, the following fusion strategy has
been used on joint positional data, but could easily
be extended on joint rotations as well. Initially, the
sum of all joint confidence levels of each skeleton is
computed and the skeleton with the highest total is
selected. Since this is the skeleton with the most
successfully tracked joints, it is expected to be the
most accurate representation of the real person pose.
We use this skeleton as a base, and enrich it with
data provided from the remaining skeletons.
Specifically, the confidence of each joint of the base
skeleton is examined. If the confidence is medium or
low, the joint position is corrected by taking into
account the position of this joint in the remaining
skeletons. If corresponding joints with high
confidence are found in any of the remaining
skeletons, their average position is used to replace
the position value of the joint. Otherwise, the same
procedure is applied for joints containing medium
confidence values. Finally, if only low confidence
values exist, the same procedure is applied using the
available skeleton data for the joint.
Figure 2: Colour maps, depth maps and skeleton frames
from 3 Kinect sensors and a fused skeleton result.
As a last step, a stabilization filtering step is
applied in order to overcome problems due to rapid
changes in joint position from frame to frame which
may occur because of the use of joint position
averaging in our fusion strategy. We use a time
window of three frames, to keep the last three high-
confidence positions for each joint. The centroid of
these three previous positions is calculated and
updated for each frame. If the Euclidean distance
between a joint position and this centroid is higher
than a certain threshold, then we replace the joint
position with the value of the centroid, so as to avoid
rapid changes in joint positions. We have used
different thresholds for each joint since hands and
feet are expected to move more rapidly.
3 MOTION ANALYSIS
The motion analysis subsystem (Figure 3) can use as
input a skeleton animation stream, either provided
from a single Kinect device, or from multiple Kinect
devices, after using the skeleton fusion procedure
described in Section 2.2.
Initially, to achieve view invariance of motion
recognition, the skeleton joint positions are
translated relative to the root of the skeleton (Hip
Center) and rotated around the y axis so that the
skeleton is facing towards the y axis. Next, the
skeleton is divided into five parts, shown in Figure 4
(torso, left hand, right hand, left foot, right foot).
Each part has a root joint and children joints. For
each skeleton part we generate a feature vector
consisting of positions of each joint relative to the
root of the part (also shown in Figure 4).
DanceAnalysisusingMultipleKinectSensors
791
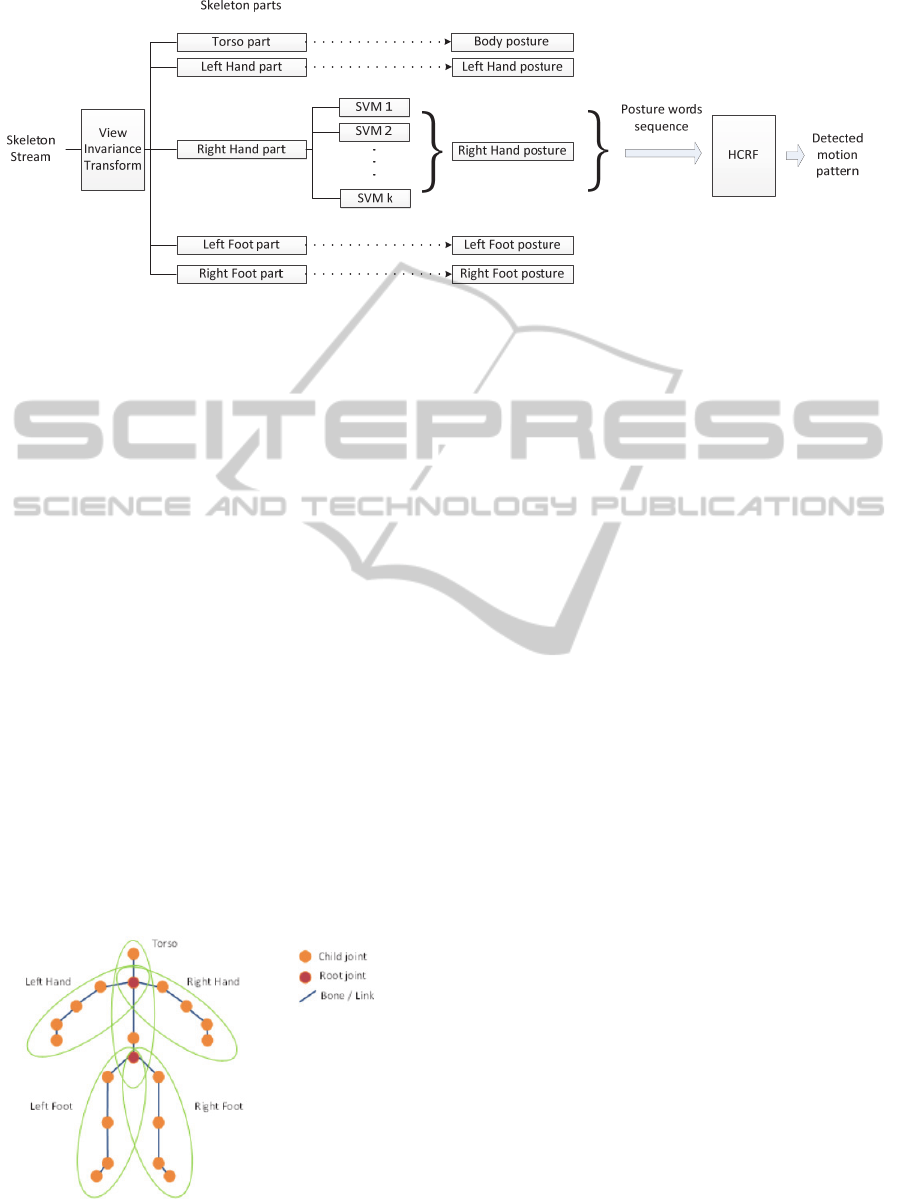
Figure 3: Motion analysis subsystem.
Specifically, the root of the torso part is the Hip
Center and the children joints are: Spine, Shoulder
Center and Head. The root of the left hand part is
the Shoulder Center and the children are: Left
Shoulder, Left Elbow, Left Wrist and Left Hand. The
root of the left foot part is the Hip Center and the
children are: Left Hip, Left Knee, Left Ankle and Left
Foot. The right hand and right foot parts consist of
the symmetrical joints of their left counterparts.
3.1 Posture Codebook
For each of the 5 skeleton parts described above, we
construct a codebook of basic postures of a
predefined size k. The identification of these basic
postures is performed automatically by using k-
means clustering of a large set of postures obtained
from one or more recorded training sequences.
Clustering essentially divides the ‘posture space’
into k discrete posture subspaces. After building a
posture codebook for each body part, we train a
multiclass SVM classifier to classify each incoming
feature vector as a specific posture from this posture
codebook. Thus we obtain five posture classifiers,
one per body part.
Figure 4: Skeleton parts.
3.2 Motion Pattern Recognition using a
HCRF Model
For the motion detection step, we have selected the
Hidden-state Conditional Random Fields (HCRF)
classifier (Quattoni et al., 2004). A set of M basic
motion patterns, i.e. sequences of frames of skeleton
data describing a specific movement, is first
identified. We then train an HCRF multi-class model
for each of these basic motion patterns. Specifically,
for the training phase, we use labelled sequences of
the basic motion patterns. Each sequence consists of
a sequence of labelled skeleton part posture vectors,
i.e. vectors of five elements, each being the index of
a basic posture from the codebook corresponding to
the specific skeleton part. For the testing phase, a
similar vector is initially estimated for each frame of
the input skeleton data sequence and is then used as
input to the HCRF classifier. Then, the identification
of each motion pattern is based on the
probability/likelihood of the model of the HCRF for
each observation sequence. For the implementation
of HCRF, the Hidden-state Conditional Random
Fields Library v2 was used
(http://sourceforge.net/projects/hcrf/).
4 EXPERIMENTAL RESULTS
To evaluate our methodology, a data recording
session took place, in which several dancers were
recorded performing the Tsamiko dance (Figure 5).
Tsamiko is a popular traditional folk dance of
Greece, done to music of ¾ meter. It is a masculine
(mostly) circular dance with more smoothly steps
danced by women. It is danced in an open circle
where the first dancer performs variations while the
others follow the basic steps. Tsamiko is danced in
various areas of Greece such as: Peloponnese,
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
792

Central Greece, Thessaly, W. Macedonia, with
variations in kinesiological structure (10, 12, 8, 16
steps). The dance follows a strict and slow tempo
with emphasis on the "attitude, style and grace" of
the dancer. The steps are relatively easy but have to
be precise and strictly on beat. Its variations consist
of both smooth and leaping steps, which give the
dance a triumphant air. The handle is hand elbows in
position W. The dance is accompanied by various
songs.
Figure 5: Recording session.
Figure 6: Tsamiko dance steps.
For the evaluation of our methodology we
recorded three male dancers, dancing the single step
version of the Tsamiko dance (Figure 6). The main
dance pattern in Tsamiko can be split in 3 basic
dance moves, which were used as the basic motion
patterns that we tried to detect. The recordings were
manually annotated to mark the beginning and end
of each move. Each dancer was recorded separately
and was required to perform the basic moves of the
dance several times.
4.1 Sensors Setup
For the final recording we used three Kinect sensors
placed in front of the dancer in an arc topology (one
in front and two at the sides), as seen in Figure 7(b).
One additional setup was tested, but was rejected for
the final recording. We tried placing four Kinect
sensors all around the dancer, at 90 degree angle
between them, as seen in Figure 7(a). This setup
allowed for approximately 2x2m active space for the
dancer to move. The interference due to infrared
emission from the sensors was minimal, but only the
two frontal sensors provided useful skeletal data,
since skeletal tracking of Microsoft SDK is designed
to work on people facing towards the sensor. Since
the dancers were moving on a small arc, they were
always facing in the same direction. Thus, our final
setup proved to be more effective since we had
skeletal tracking data from three sensors. In addition,
having a smaller angle between adjacent sensor
FOVs allowed for increased precision of calibration.
Adding more sensors proved to be problematic since
interference caused by the emission of infrared
pattern by each sensor increased significantly, which
had a negative impact on skeletal tracking.
Figure 7: Sensor setups (a) Setup A (b) Setup B (final
setup).
4.2 Evaluation Results
The recorded data consisted of eight repetitions of
basic Tsamiko dance pattern (three dance moves per
repetition) executed by each of the three dancers.
We split the recorded data into train and test sets by
using half repetitions of the basic dance pattern of
each dancer (12 repetitions per move) for training
and the remaining for testing. Initially the posture
DanceAnalysisusingMultipleKinectSensors
793
codebook was created with a codebook of k=20
basic postures for each body part using the training
motion sequences. Then, we trained an HCRF using
the train sequences to be able to distinguish between
the three basic Tsamiko dance moves. CRFs with a
varying number of hidden states were trained as can
be seen from Table 1, in which the dance move
detection accuracies of the test set are presented, per
dancer and overall. The best overall detection
accuracy that was achieved is 93,9% using an HCRF
with 11 hidden states. In Table 2, detection
accuracies are presented for each dance move.
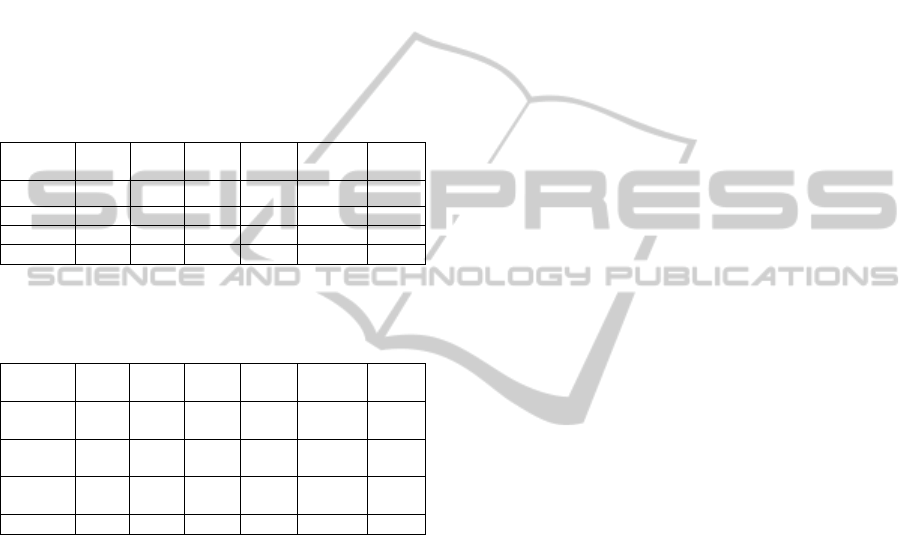
Table 1: Recognition accuracies of Tsamiko dance moves
per person and overall recognition accuracies for varying
number of hidden states in the HCRF classifier.
Hidden
States
5 8 11 12 15 20
Dancer A
38,4 61,5 84,6 76,9 76,9 69,2
Dancer B 90,9 90,9 100 100 90,9 72,7
Dancer C 66,6 88,8 100 100 100 77,7
Overall 63,6 78,7
93,9
90,9 87,8 72,7
Table 2: Recognition accuracies of Tsamiko dance moves
for varying number of hidden states in the HCRF
classifier.
Hidden
States
5 8 11 12 15 20
Dance
move 1
83,3 66,6 91,6 100 83,8 100
Dance
move 2
27,2 81,8 90,9 81,8 90,9 36,3
Dance
move 3
80 90 100 90 90 80
Overall 63,6 78,7
93,9
90,9 87,8 72,7
5 CONCLUSIONS AND FUTURE
WORK
This paper presents a study on recognizing
predefined dance motion patterns from skeletal
animation data captured by multiple Kinect sensors.
As can be seen from the experimental results, our
method gave quite promising results providing high
recognition accuracies of the three Tsamiko dance
moves. In future work we aim to experiment on
recognition of different styles of these dance moves
and adding more complex dance patterns and
variations. In addition we plan to extend our
skeleton fusion algorithm on joint rotation data (both
absolute and hierarchical) which will allow the
construction of posture codebooks based on both
position and rotation data.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Community's Seventh
Framework Programme (FP7-ICT-2011-9) under
grant agreement no FP7-ICT-600676 ''i-Treasures:
Intangible Treasures - Capturing the Intangible
Cultural Heritage and Learning the Rare Know-How
of Living Human Treasures''.
REFERENCES
Aylward, R., “Sensemble: A Wireless Inertial Sensor
System for InteractiveDance and Collective Motion
Analysis”, Masters of Science in Media Arts and
Sciences, Massachusetts Institute of Technology, 2006
Alexiadis, D., Kelly, P., Daras, P., O'Connor, N.,
Boubekeur, T., and Moussa, M., Evaluating a dancer's
performance using kinect-based skeleton tracking. In
Proceedings of the 19th ACM international conference
on Multimedia (MM '11). ACM, New York, NY,
USA, pp. 659-662, 2011.
Li, W., Zhang, Z., Liu, Z., “Action Recognition Based on
A Bag of 3D Points”, IEEE International Workshop
on CVPR for Human Communicative Behavior
Analysis (in conjunction with CVPR2010), San
Francisco, CA, June, 2010.
Wang, J., Liu, Z., Wu, Y., and Yuan, J., “Mining actionlet
ensemble for action recognition with depth cameras,”
in CVPR'12, 2012.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T.,
Finocchio, M., Moore, R., Kipman, A., and Blake, A.,
“Real-time human pose recognition in parts from
single depth images,”, in CVPR, pp. 1297 – 1304, June
2011.
Waithayanon, C. and Aporntewan, C., “A motion
classifier for Microsoft Kinect,” in Computer Sciences
and Convergence Information Technology (ICCIT),
2011 6th International Conference on, 2011.
ten Holt, G. A., Reinders, MJT., Hendricks, EA., Multi-
Dimensional Dynamic Time Warping for Gesture
Recognition. Conference Paper. 2007.
Xia, L., Chen, C.-C., and Aggarwal, J., “View invariant
human action recognition using histograms of 3D
joints,” in Computer Vision and Pattern Recognition
Workshops (CVPRW), 2012 IEEE Computer Society
Conference on, 2012.
Wang, S. Quattoni, A., Morency, L.-P., Demirdjian, D.,
and Trevor Darrell, Hidden Conditional Random
Fields for Gesture Recognition, Proceedings IEEE
Conference on Computer Vision and Pattern
Recognition, June 2006
Kinect for Windows | Voice, Movement & Gesture
Recognition Technology. 2013. [ONLINE] Available
at: http://www.microsoft.com/en-us/kinectfor
windows/
Besl, Paul J.; N.D. McKay (1992)."A Method for
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
794

Registration of 3-D Shapes". IEEE Trans. on Pattern
Analysis and Machine Intelligence (Los Alamitos,
CA, USA: IEEE Computer Society) 14 (2): 239–256.
Rusu, B., Cousins, S., "3D is here: Point Cloud Library
(PCL)," Robotics and Automation (ICRA), 2011 IEEE
International Conference on , vol., no., pp.1,4, 9-13
May 2011
Quattoni, A., Collins, M., Darrell, T., Conditional Random
Fields for Object Recognition, In Neural Information
Processing Systems, 2004.
DanceAnalysisusingMultipleKinectSensors
795
