
A Multi-level Model of Motivations and Valuations for Cognitive Agents
Samer Schaat, Klaus Doblhammer and Dietmar Dietrich
Institute of Computer Technology, Vienna University of Technology, Gusshausstrasse 27-29, Vienna, Austria
Keywords:
Cognitive Architectures, Artificial General Intelligence, Cognitive Agents, Motivations, Valuations, Emotions.
Abstract:
In developing cognitive agents using a functional model of the human mind as their decision unit, a model
of motivations and valuations is needed as the basis for the agents’ decision making. This enables agents
to cope with their internal and external world while pursuing their own agenda. We show that a technical
model based on the psychoanalytical drive concept and Damasio’s neuro-biological findings is appropriate for
human-inspired cognitive agents. In particular, after overcoming the hurdles of interdisciplinary work between
hermeneutic and axiomatic approaches, a transformation of psychoanalytical and neuro-biological concepts
into an consistent and deterministic model solves the problem of motivations and valuations in artificial cog-
nitive agents. This multi-level model is presented, in which multiple principles and influences of valuation are
used to incrementally generate and decide an agenda for the agent’s behavior.
1 INTRODUCTION
When following a holistic and integrated approach
to develop a functional model of the human mind as
a decision unit for cognitive agents, basic questions
are (1) what is the source for the agent’s agenda and
(2) how can the agent cope with the external world
while pursuing this agenda? These are key ques-
tions since a cognitive agent is also an autonomous
agent, i.e. a system situated within an environment
which it acts on in pursuit of its own agenda (Franklin,
1997). Additionally, when using the human mind as
an archetype, cognitive processes are dependent on
motivations and valuations, e.g. decision making is
based on emotions (Damasio, 2003). The first ques-
tion above can thus be phrased as the problem of mo-
tivation, i.e. what should agents do and why should
they do anything at all? The second question can
be formulated as the problem of valuation in cog-
nitive agents, i.e. the determination of relevance of
processed data (e.g. objects, plans, actions) for the
agent’s motivations. Hence, these two questions can
be regarded as interdependent, since valuation is a
means of fulfilling motivations.
When considering a holistic model of the human
mind as a decision unit in cognitive agents, embodi-
ment must be considered when tackling the problem
of motivation and valuation, in particular the inter-
action between the psyche and body. In this sense,
autonomy and embodiment are foundations of higher
cognitive functions such as planning, and motivations
are based on the agent’s bodily state on the one hand
while serving as the basis for planning on the other
hand. Hence, the model presented follows a genera-
tive approach, i.e. motivations are generated based on
the agent’s bodily needs and in turn are the source for
generating goals for planning.
As a cognitive theory the ARS project has chosen
the second topographical model of Sigmund Freud
(Freud, 1915), since it is the only appropriate holis-
tic and functional model of the human mind (Dietrich
et al., 2009) (see 2) and is also backed up by neuro-
scientific data (Solms and Turnbull, 2002). However,
it can only be used as a framework and general basis
and is not sufficient to develop a human-inspired cog-
nitive architecture. For instance, Damasio’s concept
(Damasio, 2003) is used to support the concretization
of motivations and valuations in the ARS model.
2 RELATED WORK
Motivations and valuations are key methods used by
humans to cope with and adapt to the world. Some
robot architectures, such as (Parisi and Petrosino,
2010)(Konidaris and Barto, 2006), consider drives for
motivational purposes. Nevertheless, a bionic and
functional approach to motivations and valuations are
often neglected in current cognitive architectures. Es-
tablished cognitive architectures, such as ACT-R (An-
255
Schaat S., Doblhammer K. and Dietrich D..
A Multi-level Model of Motivations and Valuations for Cognitive Agents.
DOI: 10.5220/0004916502550260
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 255-260
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

derson et al., 1997), focus on ‘higher’ cognitive func-
tions without considering the basis for these higher
functions, i.e. generation and valuation of goals. Only
a few cognitive architectures, such as MicroPsi (Bach,
2011) and CLARION (Sun, 2007), also focus on mo-
tivational aspects. However, these approaches do not
consider a generative and embodied approach. For
instance, MicroPsi distinguishes physiological, cog-
nitive and social needs, which are all hard-wired. In
the embodied approach of the ARS model all needs
are grounded in physiological needs. Based on so-
cial rules and the agent’s memories of how to sat-
isfy physiological needs in the short and long term,
they are transformed into complex motivations and
goals. CLARION in fact considers the derivation of
‘secondary’ drives from ‘primary’ drives, but uses the
drive-concept more in terms of a behavioristic ap-
proach, since it is based on Hull’s concept of drives
(Hull, 1951). In contrast to the concept of drives in
ARS, the drives’ strength in CLARION is determined
by an internal deficit and an external stimulus (e.g.
food in case of hunger). In this regard, the ARS multi-
level approach enables a more flexible motivational
system: generally speaking, a first level of motivation
and valuation considers only how to satisfy its motiva-
tion best according to the agent’s memories and with-
out consideration of the external world. After further
levels of motivation and valuation, it is only in the
ARS secondary process that the reality imposed by
the external world is considered.
Emotions are a central aspect of motivations and
valuation; they can be seen in general terms as a rep-
resentation of an agent’s internal state (emotions as
embodied information of valuation and importance)
(S. C. Marsella and Petta, 2010). Recently, various
stand-alone computational models of emotion have
been developed, i.e. they are usually not integrated
into a full-fledged cognitive architecture. Due to its
focus on the connection between emotion and cogni-
tion (S. C. Marsella and Petta, 2010), cognitive ap-
praisal theory is currently the dominant theory for
computer models of emotions. In this theory, emo-
tions emerge from the appraisal of external events
and situations under the consideration of the agent’s
beliefs, desires and intentions. The result of such
appraisal is the triggering of cognitive responses, in
particular coping strategies (e.g. planning, procrasti-
nation) (S. C. Marsella and Petta, 2010). Appraisal
theories focus on determining a sufficient set of ap-
praisal criteria to explain the elicitation and differen-
tiation of emotions. A widely used model of cog-
nitive appraisal theory is the OCC model (Ortony
et al., 1990) (e.g. used in EMA (Marsella and Gratch,
2009)), with appraisal criteria such as unexpected-
ness, level of appeal and desirability. In appraisal
theory, emotions are only elicited by evaluations of
external events and hence only considered for interac-
tion purposes. This is a major difference to the ARS
model, where the generation of emotions is influenced
by external events on the one hand and based on the
agent’s drives on the other hand. In particular, this
means the agent may be in an emotional state even
without consideration of the external world. Another
category of emotion theories follows a dimensional
approach and models emotions not as discrete enti-
ties but as points in a continuous dimensional space
(S. C. Marsella and Petta, 2010). A typical example
for this is the three-dimensional PAD model (Mehra-
bian and Russell, 1974), with pleasure (a measure of
valence), arousal (indicating the level of affective ac-
tivation) and dominance (a measure of power or con-
trol) as dimensions.
3 ARS APPROACH
The leitmotif of the ARS approach (Dietrich et al.,
2009) is to model the functions behind the desired ca-
pabilities that generate behavior instead of simply de-
scribing behavior. This complies with the generative
and broad approach of Artificial General Intelligence
(AGI).
In the ARS project, the human cognitive architec-
ture (i.e. the brain) is considered as an information
processing system that stores, manipulates and trans-
fers information. Following the standard approach in
computer technology, it is described in a top-down
design process using a layered model, starting with
three functional layers. The first layer, the neurons,
can be described as hardware under consideration of
the laws of physics. The next layer is called the neu-
rosymbolic layer, which handles the symbolization of
the neural layer. The third layer represents the psy-
chic layer, which is described in functional terms on
an algorithmic level. Following a monistic view, psy-
che and brain are of course the same, with only differ-
ent models being used in their respective descriptions.
Since only a functional description is relevant for ar-
tificial systems (but not how these functions are im-
plemented), the ARS project focuses on the descrip-
tion of the psychic apparatus. As mentioned in the in-
troduction, the second topographical model of Freud
(Freud, 1915) was chosen as a general framework,
which uses the abstract functions Id, Ego and Super-
Ego to describe the human psychic apparatus. The Id
represents drives, which are in effect bodily demands
coming from internal sensors, the Super-ego repre-
sents internalized moral demands and the Ego me-
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
256
diates between the Id and the Super-Ego under con-
sideration of the external environment. These three
abstract functions are concretized incrementally until
their description can be used for a functional model
that can be implemented in a computer simulation.
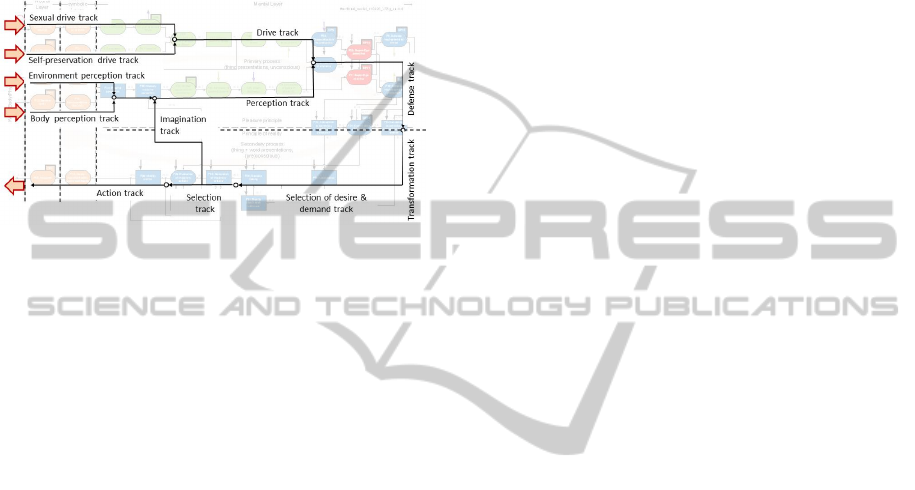
The most concrete level of the ARS functional model
is shown in Fig. 1 using a track view in which func-
tion modules are summarized into tracks.
Figure 1: ARS functional model - track view.
4 PSYCHIC INTENSITY
Following an interdisciplinary approach, the general
psychoanalytical framework is described based on
terminology used in the ARS project, and then con-
cretized by a technician in the subsequent sections to
a coherent and deterministic multi-level model of mo-
tivations and valuations.
4.1 Economic Point of View
The economic point of view describes functionalities
that focus on circulation, distribution and transforma-
tion of quantities of excitation. Freud called these
quantities ’psychic energy’ , which became a funda-
mental term in psychoanalysis (Freud, 1940, p. 158)
to designate a representation of a bodily drive-tension,
which is created by differences in homeostatic levels.
The quantification of ’psychic energy’ in the psychic
apparatus is called quota of affect. With this value,
psychic content can be used for cathexis, i.e. ’psychic
energy’ is assigned to certain psychic content via its
quota of affect. This represents the valuation of psy-
chic content. Following the so-called pleasure prin-
ciple and the principle of reality, cathexes are essen-
tial for a psychic economy since they provide the di-
rection for decisions, actions and plans that an agent
executes or wants to execute. The pleasure principle
says that the entirety of psychic activity is aimed at
avoiding unpleasure and generating pleasure, while
the principle of reality is a modification of it as as-
pects of reality are involved in this design of activ-
ity. Pleasure arises from the discharge of ’psychic en-
ergy’; unpleasure is equivalent to the sum of all quotas
of affect within the psychic apparatus. Since emotions
are experienced as an aspect of pleasure and unplea-
sure, the term ’psychic energy’ is also a basic term
for the generation of emotion and feeling, which addi-
tionally influence decision making and bodily states.
An adult psyche does not assign all ’psychic en-
ergy’ to psychic content. Instead, a certain amount
of it is available for particular psychic functions, the
so-called Ego-functions. This ’neutralized drive en-
ergy’ can be regarded as an engine for these functions,
which deal with thinking, focus of attention, planning,
adaption to reality and other concepts. This implies
discharge and produces pleasure as well.
4.2 Psychic Intensity in the ARS Model
For an embodied approach, the connection between
body and psyche, i.e. between the different descrip-
tion languages of physics and information theory (see
2), must therefore be considered. This is done by use
of the neurosymbolic layer. For the questions of mo-
tivation and valuation, this means that we must con-
sider the bodily source of motivation and valuation
(i.e. the connection between body and psyche), and
in particular the symbolization of the bodily source
and its psychic representation. The use of the term
‘psychic energy’ shows that these aspects are not con-
sidered in classical psychoanalysis. Nevertheless, in
a concrete technical model they must be concretized
and structured using the appropriate level and lan-
guage of description.
But the term ‘psychic energy’ is misleading and
not compliant with the ARS approach, since it uses
the description language of the physical world which
is only appropriate for the first layer (see above). But
it is misleading even as a metaphor for describing the
concept’s functionality, e.g. the abstract and func-
tional concept of money is better suited as a metaphor.
Since the essence of the concept is valuation, i.e. the
quantification of the importance of processed content,
the term psychic intensity was chosen as an appropri-
ate representation of the underlying functionality. As
with money, the physics of psychic intensity is irrele-
vant for its description; only a functional description
can cover the essence of the concept. In particular,
psychic intensity serves as an information value. In
the algorithmic level of the ARS model, i.e. the psy-
chic layer, the concept of psychic intensity is used as
the link between bodily needs (i.e. homeostatic needs)
and motivations, in particular as a valuation system
for determining the relevance of memories and per-
ception and as a foundation for decision making.
AMulti-levelModelofMotivationsandValuationsforCognitiveAgents
257

Next, beginning with the concept of psychic in-
tensity we describe the coherent multi-level model of
motivations and valuations.
5 A MULTI-LEVEL MODEL
The foundation for motivations and valuations in the
ARS model is provided by the concept of drives. This
is true not only for the ARS primary process, their
principal domain, but also for the secondary process,
which has to cope with the demands generated by the
drives under consideration of social rules, the agent’s
current plans and the external world. Based on the
drives, an extended representation of motivations and
valuations is given by emotions, which additionally
consider the agent’s perception. Hence motivations
and valuations are represented in the ARS agent us-
ing a multilevel model, which breaks the complexity
of the motivation system up into several levels. This
allows an incremental generation of motivations and
valuations, where motivations and valuations are ex-
tended and/or adapted using different principles (rules
of the ARS primary and secondary process) and influ-
ences (memories, perception, plans). Psychic inten-
sity is thus extended to - and concretized on - multiple
levels, which nonetheless all serve the same purpose:
motivation and valuation.
Such a multi-level model of motivations and valu-
ations based on the agent’s body and memories com-
plies with Damasio’s model (Damasio, 2003), where
the homeostatic mechanisms for the regulation and
control of the organism’s processes are considered to
be multiple but coherent levels which (in terms of evo-
lution theory) evolved as adaptations for coping with
the world.
Figure 2: Different valuation-principles and influences
(memories and perception) are considered.
Each homeostatic need is represented by an or-
ganic tension value (e.g. the volume of stomach con-
tent). As described above, this value is represented as
psychic intensity in the psychic layer. A range of 0-1
is used for the quantification of psychic intensity. A
personality parameter determines the mapping from
drive tension to psychic intensity, i.e. in which in-
tensity the agent’s psyche represents the bodily need.
Next, in the process of generating a drive representa-
tion (see Ch. 5), psychic intensity is represented as
a quota of affect which is used to valuate memories,
e.g. objects and actions that have previously satisfied
the drive, and hence represents the first level of valua-
tion. This first level of valuation lead to the first level
of motivations, drive representations. This valuation
is used under the consideration of the pleasure prin-
ciple, in particular to determine objects that have pro-
vided the best satisfaction of the drive (i.e. the bodily
need) according to the agent’s memories without the
consideration of reachability. The valuation of con-
tent may be changed by defense mechanisms, which
take into account internalized rules such as social and
moral rules (e.g. a rule that forbids eating in a spe-
cific situation may result in changing the valuation of
food objects). Next, through the function of ‘neutral-
ization’ , an amount of the drive’s quota of affect, de-
termined by a personality parameter, is reduced and
used as neutralized intensity for a possible extension
of already valuated content, using the reality principle
in the ARS secondary process as a valuation criterion.
This is primarily the consideration of the compatibil-
ity of the valuated objects and actions with the current
reality provided by the external world and with the
agent’s current plans. In general, logic and time are
considered in this valuation process. This additional
valuation transforms a drive representation to a valu-
ated goal, where the goal’s object, action and plan are
valuated. The valuation of goals can be extended by
emotions, which are another level of valuation and are
generated based on the remaining quota of affect (af-
ter neutralization) and memorized emotions that are
activated by perception. An overview of this incre-
mental multi-level valuation is provided in Fig. 2.
In the next section, the key elements of motiva-
tions and valuations, drives and emotions will be out-
lined.
5.1 Drive Representations: Motivations
in the ARS Model
The representation of a drive, i.e. a somatic organ
tension, in the psyche is provided by a drive repre-
sentation, which consists of a drive source (the or-
ganic origin), a drive aim (an activity that decreases
the organic tension) and a drive object (with which
the drive can achieve its aim). The action given by
the drive aim is always a strategic action, which is
implemented as a tactical plan. In particular, how this
action is fulfilled (the tactic) is the domain of reason-
ing in the ARS secondary process. Self-preservation
and sexual drives are distinguished. The drive source
for the former is the respective organ (e.g. stom-
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
258
ach), the drive source for the latter is called libido,
a value that represents hormonal sources. Depend-
ing on erogenous zones on four different body parts,
four so-called partial sexual drives are distinguished:
anal, phallic, oral and genital. Only the last of these
drives reproduction, while the others may be regarded
as intrinsic motivations , i.e. pleasure gain from sat-
isfying sexual drives is independent from the satis-
faction of bodily needs. To complete the represen-
tation of a drive, the agent has to choose an object
and action with which the bodily need, represented by
the drive, can be satisfied. Psychoanalytic theory de-
scribes this process as cathexis, which corresponds to
the valuation of objects and actions. Drive objects and
aims that were best valuated in the past (i.e. brought
the amounts of highest satisfaction) are valuated best.
In the ARS agent, only valuated data can be consid-
ered in the function modules. The valuation done by
cathexis is based on (1) the memorized valuation and
(2) the quota of affect available. Memorized valuation
is represented by an association between a memorized
drive representation and an object. The valuation pro-
cess consists of the following steps: (1) Activation of
memorized drive representations with the search cri-
teria of drive source and drive component using an
associative search algorithm, (2) Assignment of the
drive representation’s provided quota of affect to the
data associated to the memorized drive representa-
tions, (3) Consideration of accumulation by multiple
valuations.
5.2 Emotions and Feelings
Based on the agent’s drives and influenced by mem-
ories activated by perception, emotions are an addi-
tional representation of the agent’s internal state un-
der consideration of the external world - in particu-
lar, the agent’s experience with similar situations. The
transformation of emotions to feelings, based on con-
scious perception thereof (Damasio, 2003), forms a
new valuation-level, which may change the valuation
of goals.
Currently basic emotions (anger, mourning, anxi-
ety, joy, saturation, and elation) are considered in the
ARS agent, which are generated based on the agent’s
actual drives and perception, in particular the memo-
rized emotions associated with perception. They are
determined by four factors, namely unpleasure (the
sum of the quotas of affect), pleasure (the value gen-
erated after reducing psychic intensity), the sum of all
aggressive quotas of affect and the sum of all libidi-
nous quotas of affect. Two sources for these factors
are considered: (1) drive representations and (2) the
factors of memorized emotions that are activated by
perception. Dependent on the dominance of a subset
of these four factors, which also determine the inten-
sity of the emotions, different emotions are generated.
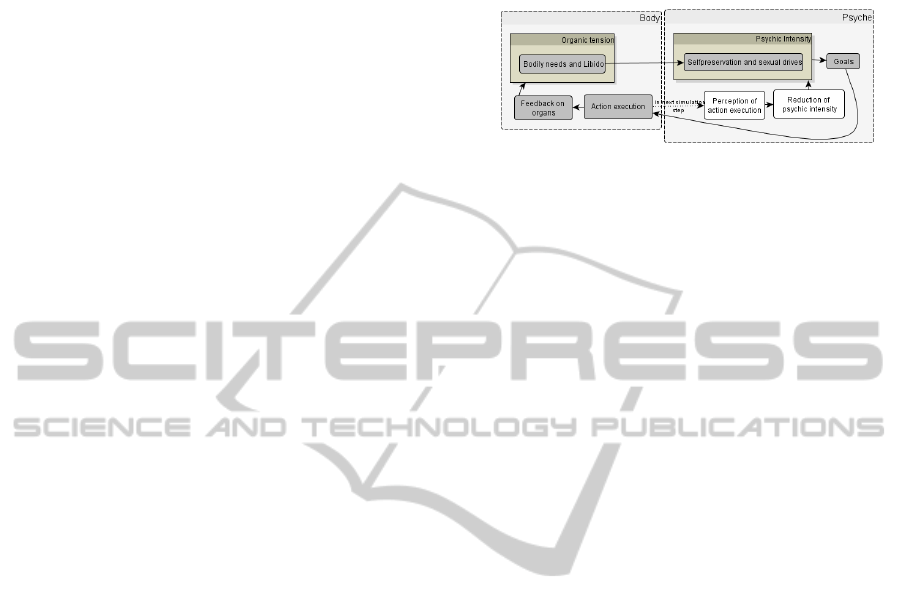
Figure 3: Feedback on body or psyche.
5.3 Motivation Control Loop
In terms of a control loop, the feedback on the source
of motivations must be considered. In the embodied
approach of the ARS model, this can occur in two
ways: the first possibility is the implicit reduction of
psychic intensity (the source of motivations) through
reduction of the respective organ tension via a specific
action. For instance, eating influences the state of the
stomach, which in turn changes drive tension and the
psychic representation thereof, psychic intensity. In
case of actions that do not produce direct feedback on
the bodily source (e.g. beating), a second possibility
of feedback is provided by the perception of the cur-
rently executed action. Since this feedback occurs on
the psychic layer, it affects psychic intensity directly.
6 SIMULATION
To find the functions behind any given behavior, a
use-case driven approach is employed: the behav-
ior to be generated by the functions of the ARS
model and their corresponding inner processes are de-
scribed together with psychoanalysts and structured
as use-cases. Thus requirements are specified that are
then fulfilled by functions and data which generate
the described behavior in an agent-based simulation.
For simulation the multi-agent simulation framework
MASON is used. After presenting a simulation of
an agent-object interaction in, here an overview of
preliminary results of simulating a social interaction
is given next. The use-case defines a situation with
two agents (a green one and a red one) and a Wiener
Schnitzel as food source.
The green agent’s drive state, especially the dom-
ination of aggressive drives (see Fig. 4), the mem-
orized valuation of the Schnitzel and the red agent,
and the green agent’s personality parameters result in
the green agent beating the red agent. In particular,
due to the green agent’s personality parameters, the
quota of affect of aggressive drive representations is
AMulti-levelModelofMotivationsandValuationsforCognitiveAgents
259

higher than that of libidinous drive representations,
and the quota of affect is only reduced minimally by
increasing neutralized intensity. Thus valuation by
the green agent occurs primarily via cathexis follow-
ing the pleasure principle, and due to the green agent’s
memories, the drive object ‘red agent’ and -aim ‘beat’
(which are transformed into the respective goal), are
valuated the highest.
Figure 4: Beating in simulation step 21 reduces aggressive
drives, which increases pleasure. Together with memorized
valuations activated by perception this leads to the genera-
tion of the shown emotional state.
The emotions shown in Fig. 4 represent the
drive representations and memories activated within
the green agent by perceiving the Schnitzel and the
red agent. Since the red agent looks similar to the
red agent’s memorized brother - who, in combina-
tion with a food source, is associated with anger -
and aggressive drive representations dominate, anger
also dominates; the low libidinous drive representa-
tions, together with the memorized joy activated by
perceiving the Schnitzel, lead to a low generation of
joy compared with beating the red agent. Beating
the red agent leads to reduction of the corresponding
psychic intensity and hence to generation of pleasure
within the green agent, which in turn increases joy
and reduces anxiety.
7 CONCLUSIONS
Valuation of objects and actions using the concept
of psychic intensity lead to the generation of drive
representations from bodily needs, which together
with emotions represent the agent’s motivations and
ground its autonomy in its body. This shows that
the development of a consistent and deterministic
model of psychoanalytic and neuro-biological con-
cepts for the simulation in agent-based systems is pos-
sible. In particular, the connections between body,
drives, emotions and goals and the feedback on the
body are considered in a deterministic and cyclic fash-
ion. The presented multi-level model, in which dif-
ferent valuation criteria are considered, shows how
human-inspired complex valuation enables an incre-
mental determination of the relevance of objects, ac-
tions, goals, and plans to reach them.
REFERENCES
Anderson, J. R., Matessa, M., and Lebiere, C. (1997). Act-
r: A theory of higher level cognition and its rela-
tion to visual attention. Human-Computer Interaction,
12(4):439–462.
Bach, J. (2011). A motivational system for cognitive ai. In
J. Schmidhuber, K. R. T. and Looks, M., editors, Pro-
ceedings of the 4th international conference on Artifi-
cial general intelligence. Springer, Berlin.
Damasio, A. (2003). Looking for Spinoza: Joy, Sorrow, and
the Feeling Brain. Harvest Books.
Dietrich, D., Fodor, G., Zucker, G., and Bruckner, D.
(2009). Simulating the Mind - A Technical Neuropsy-
choanalytical Approach. Springer, Wien.
Franklin, S. (1997). Autonomous agents as embodied ai.
Cybernetics and Systems, 28(6).
Freud, S. (1915). The Unconscious, volume XIV (1914-
1916) of On the History of the Psycho-Analytic Move-
ment, Papers on Metapsychology and Other Works.
Vintage.
Freud, S. (1940). An outline of psycho-analysis. Interna-
tional Journal of Psycho-Analysis, 21:27–84.
Hull, C. (1951). Essentials of Behavior. Yale University
Press, New Haven.
Konidaris, G. and Barto, A. (2006). An adaptive robot moti-
vational system. In From Animals to Animats 9, pages
pp 346–356. Springer, Berlin.
Marsella, S. C. and Gratch, J. (2009). Ema: A process
model of appraisal dynamics. Cognitive Systems Re-
search, 10(1):70–90.
Mehrabian, A. and Russell, J. (1974). An approach to envi-
ronmental psychology. MIT Press, Cambridge.
Ortony, A., Clore, G. L., and Collins, A. (1990). The Cog-
nitive Structure of Emotions. Cambridge University
Press, New York.
Parisi, D. and Petrosino, G. (2010). Robots that have emo-
tions. Adaptive Behavior, 18(6):453–469.
S. C. Marsella, J. G. and Petta, P. (2010). Computational
models of emotion. In K.R. Scherer, T. B. and Roesch,
E., editors, Blueprint for Affective Computing. Oxford
University Press, New York.
Solms, M. and Turnbull, O. (2002). The Brain and the Inner
World: An Introduction to the Neuroscience of Sub-
jective Experience. Karnac/Other Press, Cathy Miller
Foreign Rights Agency, London, England.
Sun, R. (2007). The motivational and metacognitive control
in clarion. In Gray, W. D., editor, Integrated Models
of Cognitive Systems, pages 63–75. Oxford University
Press, New York.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
260
