
A Neural Network Approach for Human Gesture Recognition with a
Kinect Sensor
T. D’Orazio
1
, C. Attolico
2
, G. Cicirelli
1
and C. Guaragnella
2
1
ISSIA - CNR, via Amendola 122/D, Bari, Italy
2
DEI, Politecnico di Bari, Bari, Italy
Keywords:
Feature Extraction, Human Gesture Modelling, Gesture Recognition.
Abstract:
Service robots are expected to be used in many household in the near future, provided that proper interfaces
are developed for the human robot interaction. Gesture recognition has been recognized as a natural way
for the communication especially for elder or impaired people. With the developments of new technologies
and the large availability of inexpensive depth sensors, real time gesture recognition has been faced by using
depth information and avoiding the limitations due to complex background and lighting situations. In this
paper the Kinect Depth Camera, and the OpenNI framework have been used to obtain real time tracking of
human skeleton. Then, robust and significant features have been selected to get rid of unrelated features and
decrease the computational costs. These features are fed to a set of Neural Network Classifiers that recognize
ten different gestures. Several experiments demonstrate that the proposed method works effectively. Real time
tests prove the robustness of the method for realization of human robot interfaces.
1 INTRODUCTION
Service robots are expected to be used into every
household in the near future. The interaction with
keyboard or button is not natural for disabled or el-
der people. Gesture recognition can be used as an
effective and natural way to control robot navigation.
Recognition of human gesture from video sequences
is a popular task in the computer vision community
since it has wide applications including, among oth-
ers, video surveillance and monitoring, human com-
puter interface, augmented reality, and so on. The use
of video sequences of color images made this one a
challenging problem due to the interpretation of com-
plex situations in real-life scenarios such as cluttered
background, occlusion, illumination and scale varia-
tions (Leo et al., 2005; Castiello et al., 2005). The
recent availability of depth sensors has allowed the
recognition of 3D gesture avoiding a number of prob-
lems due to cluttered background, multiple people in
the scene, skin color segmentation and so on. In par-
ticular, inexpensive Kinect sensors have been largely
used by the scientific community as they provide an
RGB image and a depth of each pixel in the scene.
These sensors have an RGB camera and an infrared
(IR) emitter associated with an additional camera, and
acquire a new structure of data (RGBD images) that
has given rise to a new way to process images. Many
functionalities to process sensory data are available
in open source frameworks such as OpenNI, and al-
low the achievement of complex tasks such as people
segmentation, real time tracking of a human skele-
ton (being this one a structure widely used for ges-
ture recognition), scene information, and so on (Cruz
et al., 2012).
In the last years many papers have been presented
in literature which use the Kinect for human gesture
recognition applied in several contexts. In (Cheng
et al., 2012; Almetwally and Mallem, 2013) new
techniques to imitate the human body motion on hu-
manoid robots were developed using the available
skeletal points received from the Kinect Sensors. The
ability of the OpenNI framework to easily provide the
position and segmentation of the hand has stimulated
many approaches on the recognition of hand gestures
(den Bergh et al., 2011; J.Oh et al., 2013). The hand
orientation and four hand gestures (open, fist,..) are
used in (den Bergh et al., 2011) for a gesture recog-
nition system integrated on an interactive robot which
looks for a person to interact with, ask for directions,
and detects a 3D pointing direction. The motion pro-
files obtained from the Kinect depth data are used in
(Biswas and Basu, 2011) to recognize different ges-
tures by a multi class SVM. The motion information
741
D’Orazio T., Attolico C., Cicirelli G. and Guaragnella C..
A Neural Network Approach for Human Gesture Recognition with a Kinect Sensor.
DOI: 10.5220/0004919307410746
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 741-746
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

is extracted by noting the variation in depth between
each pair of consecutive frames. In (Bhattacharya
et al., 2012) seven upper body joints are considered
for the recognition with SVM of aircraft marshaling
gestures used in the military air force. The method
requires the data stream editing by a human observer
who marks the starting and ending frame of each ges-
ture. The nodes of the skeleton, in (Miranda et al.,
2012), are converted in a joint angle representation
that provides invariance to sensor orientation. Then a
multiclass SVM is used to classify key poses which
are forwarded as a sequence to a decision forest for
the final gesture recognition. Also in (Gu et al., 2012)
joint angles are considered for the recognition of six
different gestures but different HMMs have been used
to model the gestures. The HMM which provides the
maximum likelihood gives the type of gesture. Four
joint coordinates relative to the left and right hands
and elbows are considered in (Lai et al., 2012) and the
normalized distances among these joints form the fea-
ture vector which is used in a nearest neighbor clas-
sification approach. A rule based approach is used
in (Hachaj and Ogiela, 2013) to recognize key pos-
tures and body gestures by using an intuitive reason-
ing module which performs forward chaining reason-
ing (like a classic expert system) with its inference
engine every time new portion of data arrives from
the feature extraction library.
In this paper a real time gesture recognition sys-
tem for human robot interface is presented. We pro-
pose a method for gesture recognition from captured
skeletons in real time. The experiments were per-
formed using the Kinect platform and the OpenNI
framework, in particular considering the positions of
the skeleton nodes which are estimated at 30 frames
per second. The variations of some joint angles are
used as input to several neural network classifiers
each one trained to recognize a single gesture. The
recognition rate is vey high as will be shown in the ex-
perimental section. The rest of the paper is organized
as follows: section 2 describes the proposed system,
section 3 resumes the results obtained during off-line
and on-line experiments. Finally section 4 reports a
discussion and conclusions.
2 THE PROPOSED SYSTEM
In this work we propose a Gesture Recognition ap-
proach which can be used by a human operator as a
natural human computer or human robot interface. In
figure 1 both the segmentation and the skeleton pro-
vided by the OpenNI framework are shown.We have
used the abilities of the Kinect software to identify
Figure 1: The people segmentation and the skeleton ob-
tained by the Kinect sensor.
Figure 2: The description of the gestures Attention (G
3
) and
Mount (G
7
).
and track people in the environment and to extract
the skeleton with the joint coordinates for the ges-
ture recognition. Ten different gestures executed with
the right arm have been selected from the ”Arm-and-
Hand Signals for Ground Forces” and correspond to
the signals Action Right, Advance, Attention, Contact
Right, Fire, Increase Speed, Mount, Move Forward,
Move Over, Start Engine. For the sake of brevity we
will refer to these gestures with the abbreviations G
1
,
G
2
, .. G
10
and we will demand to (SpecialOPeration,
2013) for a detailed description of the selected signals
(see figure 2 for the description of G
3
and G
7
). The
gestures have been executed severaltimes by different
persons and some of these executions have been con-
sidered for the model generation while the remaining
for the test phase.
2.1 Selection of Significant and Robust
Features
The problem of selecting significant features which
preserve relevant information to the classification, is
fundamental for the ability of the method to recog-
nize gestures. Many papers in literature consider the
coordinate variations of some joints such as the hand,
the elbow, the shoulder and the torso nodes. How-
ever when coordinates are considered it is necessary
to introduce a kind of normalization in order to be in-
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
742

dependent of the position and the height of the person
in the scene. An alternative way could be the use of
angles among joint nodes, but the angle representa-
tion is not enough to describe rotation in 3D as the
axis of rotation has to be specified to represent a 3D
rotation. For this reason we have considered the in-
formation provided by the 2.2 OpenNi version, i.e.
the quaternions of the joint nodes. The Quaternion
is a set of numbers that comprises a four-dimensional
vector space and is denoted by q = a+ bi+ cj + dk,
where a, b, c, d are real numbers and i, j, k are imagi-
nary units. The quaternion q represents an easy way
to code any 3D rotation expressed as a combination
of a rotation angle and a rotation axis. In fact starting
from the vector q it is possible to extract the rotation
angle φ and the rotation axis [v
x
, v
y
, v
z
] as follows:
φ = 2· arccosa (1)
[v
x
, v
y
, v
z
] =
1
sin(
1
2
φ)
[b, c, d] (2)
Quaternions can offer fundamental computational
implementation and data handling advantages over
the conventional rotation matrix. In the considered
case, the quaternions of the joint nodes store the direc-
tion the bone is pointing to. For the recognition of the
ten considered gestures, the quaternions of the shoul-
der and elbow right nodes have been selected produc-
ing a feature vector V
i
= [a
s
i
, b
s
i
, c
s
i
, d
s
i
, a
e
i
, b
e
i
, c
e
i
, d
e
i
],
where i is the frame number, the index
s
stands for
shoulder and
e
stands for elbow.
Experimental evidence has demonstrated that,
even if the joint position stability is not always guar-
anteed as it depends on the lighting condition, the re-
flectivity properties of dresses and so on, the features
extracted are robust enough to characterize the peri-
odicity of the gestures. As the user moves freely to
give the gesture command, the length of the gesture
can be different when executed by different persons.
In order to extract more invariant features from the
input gesture, the considered features are re-sampled
with the same interval and the missing values are in-
terpolated. For more precise recognition result, the
total length of each gesture is normalized to 60 frames
corresponding to the gesture duration of two seconds.
2.2 Gesture Recognition Algorithm
The models for the gesture recognition have been con-
structed by using ten different Neural Networks (NN),
one for each gesture, which have been trained pro-
viding a set of feature sequences of the same gesture
as positive examples and the remaining sequences of
other gestures as negative examples. Each NN has
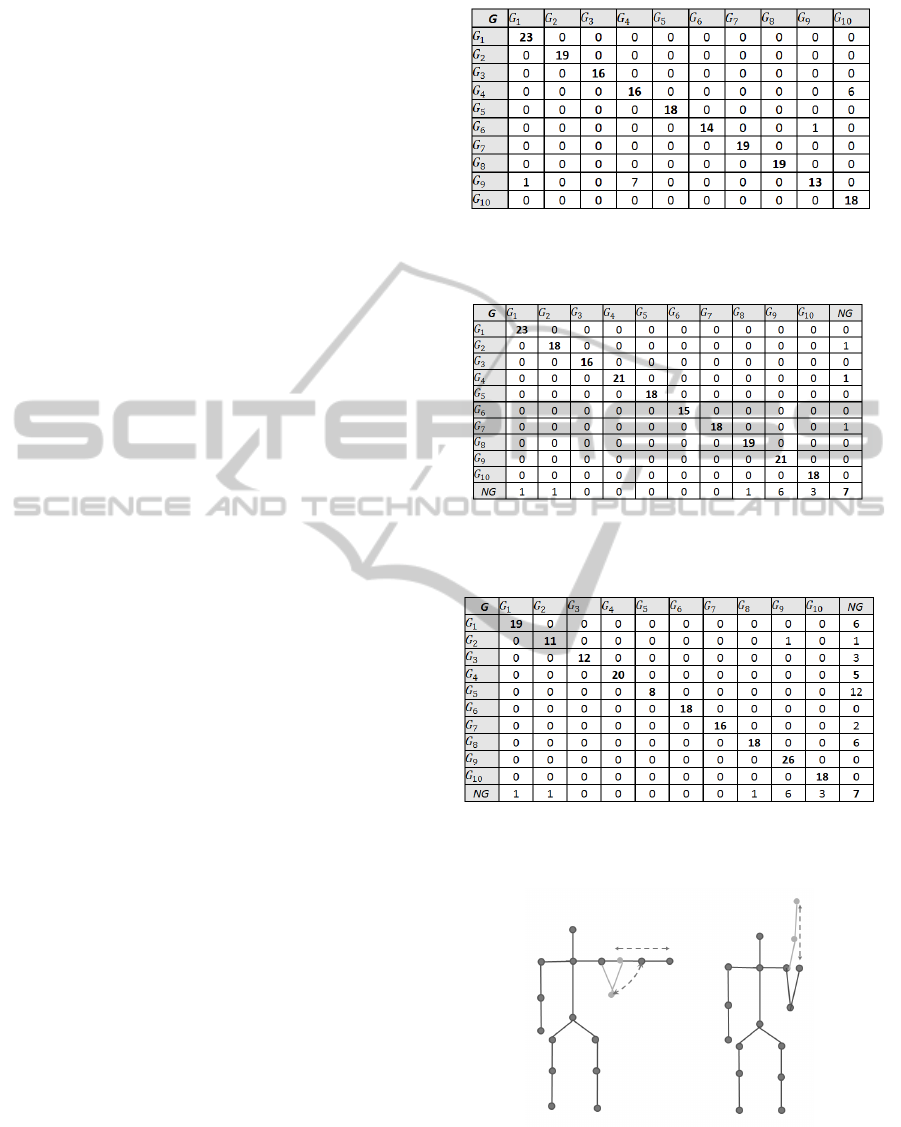
Figure 3: The scatter matrix for the recognition of the 10
gestures with quaternions. Tests were executed on the same
persons used in the training set.
an input layer of 480 nodes corresponding to the fea-
ture vectors V
i
for 60 consecutive frames, an hidden
layer of 100 nodes and an output layer of one node
trained to produce 1 if the gesture is recognized and
zero otherwise. The Backpropagation Learning algo-
rithm has been applied and the best configuration of
hidden nodes has been selected in an heuristic way
after several experiments. At the end of the learn-
ing phase, in order to recognize a gesture a sequence
of features is provided to all the 10 NNs and the one
which returns the maximum value is considered the
winning gesture. This classification procedure gives
a result also when a gesture does not belong to any of
the ten classes. For this reason a threshold has been
introduced in order to decide if the maximum answer
among the NN outputs has to be assigned to the cor-
responding class or not.
3 EXPERIMENTAL RESULTS
Two different sets of experiments were carried out:
off line experiments and on line experiments. In the
first case the recognition system has been tested on
different persons, extracting manually the sequences
of features and comparing the performances with dif-
ferent feature selections. The on line experiments in-
stead were carried out to establish the ability of the
proposed algorithm to identify the gesture when dif-
ferent repetitions are proposed and when the system
has no knowledge about the starting frame.
3.1 Off-line Experiments
The proposed algorithm was tested using a database
of 10 gesture performed by 10 different persons. Se-
lected sequences of gestures performed by five of
these persons were used to train the NNs, while
the remaining ones together with the sequences of
gestures performed by the remaining five persons
were used for the test. We will distinguish initially
ANeuralNetworkApproachforHumanGestureRecognitionwithaKinectSensor
743
the experiments on the same persons used in the
training sets (the first 5 persons), with the experi-
ments executed on the other five persons. We dis-
tinguish between these two sets as the execution of
the same actions can be very different when they
are recorded in different sessions by people who
have not seen previous acquisitions. In order to
demonstrate that the selected features are represen-
tative for the gesture recognition process, first of all
a comparative experiment has been carried out con-
sidering two types of input features: 1) two quater-
nions relative to the elbow and the shoulder and
2) three joint-anlges: hand-elbow-shoulder, elbow-
shoulder-torso and elbow-rightshoulder-leftshoulder.
Then, ten NNs were trained by using sequences of
24, 26, 18, 22, 20, 20, 21, 23, 23, 25 repetitions of ges-
tures performed by the first 5 persons. Notice
that each sequence refers to a gesture: in the or-
der G1, G2, G3 and so on. Each NN used the
corresponding set of gestures as positive examples
and all the remaining as negative examples. Anal-
ogously, the tests were carried out by selecting dif-
ferent executions of the same gestures for a to-
tal of 23, 19, 16, 22, 18, 15, 19, 19, 21, 18 respectively,
performed by the same 5 persons. In figures 3 and 4
the scatter matrices of the first two tests are reported:
in the first one the results with the quaternion and in
the second one the results with the joint angles are
listed. It is evident that the joint angles are not enough
to recognize the gestures, while quaternions fail only
for one of the sequences of gesture G
4
. The experi-
ments with quaternions have been repeated by intro-
ducing some sequences which did not belong to any
of the ten gestures. In this case in order to recognize a
No Gesture class, a threshold was introduced in order
to evaluate the maximum value among the NN out-
puts: if the maximum outputs is under the threshold
the gesture is classified as No Gesture. As a conse-
quence some gestures that were correctly classified in
the scatter matrix reported in 4 are now considered as
No Gesture in 5 since the maximum value is under the
threshold of 0.7 (see the last column NG). Accord-
ing to the threshold value the number of false nega-
tives (gesture recognized as No gesture) and true neg-
atives (No gesture detected as No gesture) can greatly
change. In figure 6 the experiments have been re-
peated on sequences acquired by persons that were
non included in the training set and using a thresh-
old for the detection of No gesture. As expected the
maximum answers of the NNs are smaller than those
obtained in the previous experiments, but the recogni-
tion of many of the ten gestures is howeverguaranteed
using a smaller threshold value of 0.4.
Figure 4: The scatter matrix for the recognition of the 10
gestures with joint angles.Tests were executed on the same
persons used in the training set.
Figure 5: The scatter matrix for the recognition of the 10
gestures with quaternions with a threshold of 0.7 on the NN
maximum value for the detection of NoGesture.
Figure 6: The same experiment of figure 5 on different per-
sons not included in the training set. The threshold for the
detection of NoGesture is 0.4.
Figure 7: The description of the gestures Action Right (G
1
)
and Increase Speed (G
6
).
3.2 On Line Experiments
In the off line experiments the sequences were manu-
ally extracted both for the training and the test of the
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
744
ten NNs. However for the real application of such a
recognition system we have to consider that it is not
possible to know the starting frame of each gesture.
For this reason another set of experiments, named on
line experiments, was carried out. Different persons
were asked to repeat the same gesture without inter-
ruption and all the frames of the sequences were pro-
cessed. A sliding window of 60 frames was extracted
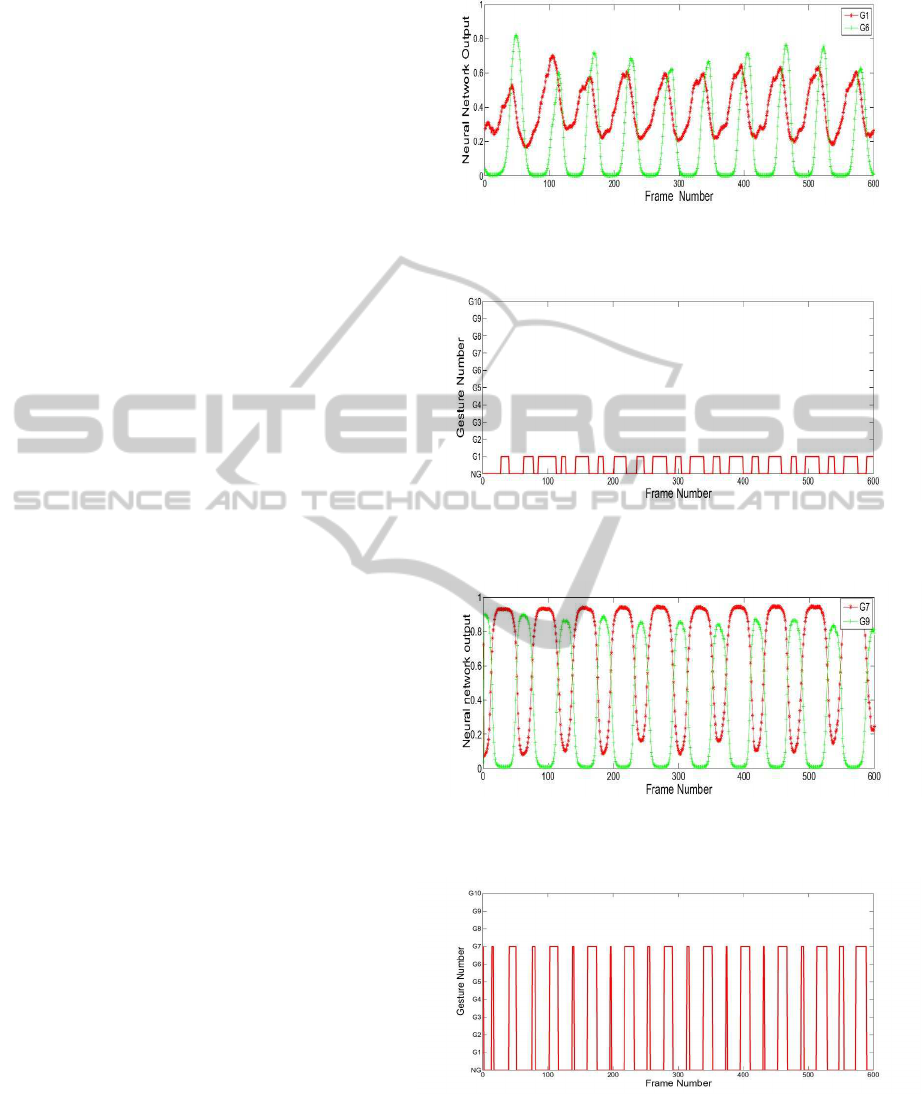
and fed to all the 10 NNs. In figure 8 the output of
the NNs for the execution of the Gesture 1 over a se-
quence of 600 frames, are reported. In red (◦) the cor-
rect answers of the NN1 and in green (+) the wrong
answers of the NN6 are shown. It is evident that for
most of the time the maximum answers are provided
by the correct NN1 whereas in some regular intervals
the NN6 provides larger values. The wrong answers
are justified by the fact that if the sliding windows is
not centered at the beginning of the gestures then the
NN1 provides values lower than NN6. In particular
observing these two gestures (G
1
and G
6
), the cen-
tral part of the G1 is very similar to the beginning of
G
6
(see figure 7). A filter on the number of consecu-
tive concordant answers is applied (35 frames in this
case). The results are reported in figure 9: for most
of the time G
1
is correctly recognized while in the re-
maining intervals a no gesture is associated. The same
conclusions are confirmed by the results reported in
figures 10 and 11 where G
7
has been repeated by an-
other person several times. The gesture is in part con-
fused with G
9
but with the filter on the number of
concordant answers only G
7
is correctly recognized.
4 DISCUSSION AND
CONCLUSIONS
In this paper we have proposed a gesture recognition
system based on a Kinect sensor, a low cost RGBD
camera, which provides people segmentation in an
effective way and skeleton information for real time
processing. We used the quaternion features of the
right shoulder and elbow nodes to construct the mod-
els of 10 different gestures. Thus ten different Neural
Networks have been trained using a set of positive ex-
amples of the corresponding correct gesture and the
remaining gestures as negative examples. Off-line ex-
periments have demonstrated that the NNs are able to
model the considered gestures when the sequences of
frames corresponding to the gestures of both persons
included and not included in the training set, are man-
ually extracted during a set of acquisitions. However
the knowledge of the initial frame in which the ges-
ture starts is not always guaranteed during on line ex-
periments, for this reason we have imposed the con-
Figure 8: The results of the gesture recognition over a se-
quence of 600 frames during which G
1
has been executed
in a continuous way.
Figure 9: The results of the gesture recognition when a
threshold on the number of consecutive answers is applied:
G
1
is correctly recognized.
Figure 10: The results of the gesture recognition over a se-
quence of 600 frames during which G
7
has been executed
in a continuous way.
Figure 11: The results of the gesture recognition when a
threshold on the number of consecutive answers is applied:
G7 is correctly recognized.
straint on the repetition of the same action for a num-
ber of consecutive times, in order to make a decision
by observing the results of a sliding window moved
ANeuralNetworkApproachforHumanGestureRecognitionwithaKinectSensor
745

over the entire sequence. In this way we are sure that
when the sliding window is centered around the ges-
ture the corresponding NN will provide the maximum
answers, while when the window overlaps the ending
or the beginning parts of the gestures some false pos-
itive answers can be provided. The obtained results
are very encouraging as the number of false positives
is always smaller than the true positives. Furthermore
by filtering on the number of consecutive concordant
answers a correct final decision can be taken. Tests
executed on persons different from those used in the
training set have demonstrated that the proposed sys-
tem can be trained off line and used for the gesture
recognition by any other user with the only constraint
of repeating the same gesture more times.
In future work we will face the problem of the
length of the gestures. In this paper we have imposed
that the gestures are all executed in 2 seconds corre-
sponding to 60 frames. When the gestures are exe-
cuted with different velocities the correct association
is not guaranteed. Current researches focus on the
automatic detection of the gesture length and on the
normalization of all the executions by interpolating
the missing values.
ACKNOWLEDGEMENTS
This research has been developed under grant PON
01-00980 BAITAH.
REFERENCES
Almetwally, I. and Mallem, M. (2013). Real-time tele-
operation and tele-walking of humanoid robot nao us-
ing kinect depth camera. 10th IEEE International
Conference on Networking, Sensing and Control (IC-
NSC), page 463466.
Bhattacharya, S., Czejdo, B., and Perez, N. (2012). Gesture
classification with machine learning using kinect sen-
sor data. Third International Conference on Emerging
Applications of Information Technology (EAIT), pages
348 – 351.
Biswas, K. and Basu, S. (2011). Gesture recognition using
microsoft kinect. 5th International Conference on Au-
tomation, Robotics and Applications (ICARA), pages
100–103.
Castiello, C., D’Orazio, T., Fanelli, A., Spagnolo, P., and
Torsello, M. (2005). A model free approach for pos-
ture classificatin. IEEE Conf. on Advances Video and
Signal Based Surveillance, AVSS.
Cheng, L., Sun, Q., Cong, Y., and Zhao, S. (2012). De-
sign and implementation of human-robot interactive
demonstration system based on kinect. 24th Chi-
nese Control and Decision Conference (CCDC), page
971975.
Cruz, L., Lucio, F., and Velho, L. (2012). Kinect and rgbd
images: Challenges and applications. XXV SIBGRAPI
IEEE Confernce and Graphics, Patterns and Image
Tutorials, page 3649.
den Bergh, M. V., Carton, D., de Nijs, R., Mitsou, N., Land-
siedel, C., Kuehnlenz, K., Wollherr, D., Gool, L. V.,
and Buss, M. (2011). Real-time 3d hand gesture inter-
action with a robot for understanding directions from
humans. 20th IEEE international symposium on robot
and human interactive communication, pages 357 –
362.
Gu, Y., andY. Ou, H. D., and Sheng, W. (2012). Human
gesture recognition through a kinect sensor. IEEE In-
ternational Conference on Robotics and Biomimetics
(ROBIO), pages 1379 – 1384.
Hachaj, T. and Ogiela, M. (2013). Rule-based approach
to recognizing human body poses and gestures in real
time. Multimedia Systems.
J.Oh, Kim, T., and Hong, H. (2013). Using binary decision
tree and multiclass svm for human gesture recogni-
tion. International Conference on Information Science
and Applications (ICISA), pages 1 – 4.
Lai, K., Konrad, J., and Ishwar, P. (2012). A gesture-
driven computer interface using kinect. IEEE South-
west Symposium on Image Analysis and Interpretation
(SSIAI), pages 185 – 188.
Leo, M., P.Spagnolo, D’Orazio, T., and Distante, A. (2005).
Human activity recognition in archaeological sites by
hidden markov models. Advances in Multimedia In-
formation Procesing - PCM 2004.
Miranda, L., Vieira, T., Martinez, D., Lewiner, T., Vieira,
A., and Campos, M. (2012). Real-time gesture recog-
nition from depth data through key poses learning
and decision forests. 25th SIBGRAPI Conference on
Graphics, Patterns and Images (SIBGRAPI), pages
268 – 275.
SpecialOPeration (2013). Arm-and-hand signals for ground
forces. www.specialoperations.com/Focus/Tactics/
Hand
Signals/default.htm.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
746
