
Introduction for Instructions Hetero Sensitivity of Pheromone with
Ant Colony Optimization
Hisayuki Sasaoka
Dep. of Electronics and Computer Engineering, Asahikawa National College of Technology,
Shunkoh-dai 2-2, Asahikawa, Japan
Keywords: Multi-agent System, Swarm Intelligence, Pheromone Communication, Ant Colony Optimization.
Abstract: We have known that Ant Colony System (ACS) is one of powerful meta-heuristics and some researchers
have reported the effectiveness of some applications using the algorithm. On the other hand, we have known
that the algorithms have some problems when we employed it in multi-agent system and we have proposed
a new method which is based on Max-Min Ant System (MM-AS), which is improved on ACS. This paper
describes results of evaluation experiments with agents implemented our proposed method. In these
experiments, we have prepared some different types of agents, which have hetero sensitivity of pheromone.
The pheromones are deposited by agents and they help to search the shortest path for agents. The reason that
we employ the agents are inspired by the report by researcher in the field of biology. Then we have prepared
some conditions for RoboCup Rescue Simulation system (RCRS). To confirm the effectiveness, we have
considered agents’ action in the simulation system.
1 INTRODUCTION
We know that real ants are social insects and there is
no central control and no manager in their colony.
However each ant can work very well (Gordon,
1999),(Keller and Gordon, 2009),(Wilson and Duran
2010). Dorigo et al. have inspired real ants’ feeding
actions and their pheromone communications. Then
they have proposed the algorithm of Ant System
(Dorigo, 1996). We have proposed a new method
which is based on Max-Min Ant System (MM-AS)
(Stützle and Hoos, 2000), which is improved on
ACS (Bonabeau, Dorigo and Theraulaz, 1999),
(Bonabeau, Dorigo and Theraulaz, 2000). Some
researchers have reported the effectiveness of
systems installed the algorithms and their improved
algorithms. MM-AS derived from Ant System and
achieved an improved performance compared to AS
and to other improved versions of AS for travelling
salesperson problems (TSP).
This paper describes results of evaluation
experiments with agents implemented our proposed
method. In these experiments, we have prepared
some different types of agents, which have hetero
sensitivity of pheromone. The pheromones are
deposited by agents and disappear in time. Then
they help to search the shortest path for agents. The
reason that we employ these agents is inspired by the
report by researcher in the field of biology.
Moreover we have done some experiments for
evaluation. We have prepared some conditions for
RoboCup Rescue Simulation system (RCRS)
(RoboCup Web site). To confirm the effectiveness,
we have considered agents’ action in the simulation
system.
There are a lot of distributed constraint
satisfiability problems and researchers tackle
problems by their method. For example, TSP,
network routing problems and so on. However, they
have no noise when they are solving problems and
information to resolve problems, for example
distances between visiting cities in TSP, are given in
advance. Moreover their situations have never
changed for each simulation steps. To resolve
problems in the real social, situations in environment
are always changing, dynamically. In some cases,
we are disable to know cues to resolve the problem
in advance. In other case, some outer noise gets
information erased or interpolation them.
305
Sasaoka H..
Introduction for Instructions Hetero Sensitivity of Pheromone with Ant Colony Optimization.
DOI: 10.5220/0004921803050310
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 305-310
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 BASIC IDEA
2.1 RoboCup Rescue Simulation
System
We have employed RoboCup Rescue Simulation
system (RCRS) as a test-bed. This system has its
server and four different types of agents. They are a
fire-brigade agent, a police-force agent, an
ambulance agent and a civilian agent and they hold
correspondence with each program and they have
been able to simulate a situation of a city’s disaster.
Moreover the system has been able to simulate
different situations in each conditions and maps for
simulators.
The RoboCup Project System intends to promote
researches which scope the disaster mitigation,
search and rescue problems. Then we need to
develop three types of agents, which are a fire-
brigade agent, a police-force agent and an
ambulance agent. Figure 1 shows a screen shot of a
performance of the simulation system. It shows a
map of city and deep grey rectangles indicates
buildings and light grey rectangle shows roads.
Black parts on the roads means blocks on the road
and agents cannot go through the place at the block.
In the figure, red circles indicate fire-brigade agents
and a mark of fire plug means a centre of fire-
brigade. Blue circles indicate police-force agents and
a mark of policeman helmet means a centre of
police-force agents. White circles indicate
ambulance agents and a mark of white cross means a
centre of ambulance agents. Green circles indicate
civilian agents and a mark of red house means an
emergency refuge centre.
Figure 1: A Screenshot of Running RoboCup Rescue
Simulation System.
RCRS server program has evaluated actions by
each type of agents and it has calculated scores. The
score is calculated by equation (1).
(1)
On the other hand, in a situation of RoboCup
rescue simulation system, agents need to handle
huge amount of information and take actions
dynamically. Therefore, this simulation system of
RoboCup rescue is a very good test bed for multi-
agent research and we have used it in this research.
This paper addresses a problem of ACS and MM-AS
and we propose our proposed method based on MM-
AS and apply to agents of fire-brigade agents in my
team on RoboCup Rescue Simulation System.
2.2 Algorithm for Depositing
Pheromone
We have proposed an algorithm of method based
(Sasaoka, 2013). In our method, the range of
pheromone trail value is decided by hand from
preliminary experiment. Moreover, we have
confirmed that there is a noise of pheromone trail in
the initial steps of updating pheromone trails. Then,
our algorithm has calculated by equation (2) in the
initial steps. This ρ
init
aims to cut down effect from
the noise and the value is also decided by hand.
(2)
3 ALGORITHM FOR
FIRE-BRIGADE AGENTS
3.1 RoboCup Rescue Simulation
System
We have applied our algorithm to searching actions
to a water supplying point for fire-brigade agents.
The searching algorithm has two steps. It has shown
below,
1. In the case that the agents has no water to
extinguish a fire,
i.in the case that the agent has known a way to a
water supply position, it heads along the way.
ii.in the case that the agent has not known a way
to a water supplying point, it heads a way in
random order.
2. In the other case, the agent has enough water,
it heads for a fire point.
damage building of
agentcivilian surviving of
rate
numberthescore
)()()1()( ttt
k
ijinitijij
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
306

Moreover, the action of updating pheromone has
two steps. It has shown below,
1. After the agent is able to get water, it does
“say” command to broadcast a point of water
supply position.
2. Other agents who do not have water track
back.
3.2 Preliminary Experiment
We have developed experimental agents based on
sample agents whose source codes are included
RCRS simulator-package file. We have prepared
three different types of fire-brigade agents . They are
below,
Type-A agents: are equal to base fire-brigade
agents.
Type-B agents: are implemented our proposed
algorithm.
Type-C agents: are implemented our proposed
algorithm. Moreover they select only best path
calculated by pheromone’s concentrate.
We have developed three teams for this
experiments. One of them is Team A whose fire-
brigade agents are Type-A agents. Another team is
Team B whose fire-brigade agents are Type-B
agents. The other team is Team C whose fire-brigade
agents are Type-C agents. We have run simulation
programs in 1500 steps, which is for five times on
simulation term. The map for this experiment is also
included RoboCup Rescue Simulation simulator-
package file. A score of the map is 121.000 point at
the start of simulation. Table 1 shows results. Other
types of agents are equal to sample agents in
RoboCup rescue simulation simulator-package file.
Table 1: Results in preliminary experiment.
Team A Team B Team C
1
18.172 17.351 20.326
2
16.795 17.509 19.320
3
13.521 17.743 18.591
4
16.521 18.126 21.968
5
17.950 20.508 18.372
Averages
16.594 18.247 19.715
The scores of Team B and C have achieved
better than the score of Team A. From them, we
have confirmed the effectiveness of our proposed
method. A system implemented an algorithm of Ant
Colony Optimization aims to converge optimized
solutions quickly. At the same time, the system
aims to grow in diversity for candidates of optimized
solutions. One of problems in this algorithm is that
the system need to make an adjustment between
them.
Then we have consider the effectiveness of an
introduction of agents which have hetero sensitive of
pheromone and suitable for each environment. The
reason of this introduction has been inspired from a
report by researcher in the field of biology (Ishii and
Hasegawa, 2013). In this research, the proportion of
agents which have hetero sensitivity of pheromone is
decided in advance.
4 EVALUATION EXPERIMENT I
4.1 Procedures
To confirm the effectiveness of this introduction of
agents with hetero sensitivity of pheromone, we
have developed seven teams. The proportions of
agents are shown in Table 2. The other condition of
the experiment is the same as the previous
preliminary experiment.
4.2 Results
Table 3 shows scores of these teams in each times
and averages scores of them. The scores were
calculated by RCRS server programs according to
equation (1), which we described in the previous
chapter. A team which has achieved the higher
scores has taken more effective actions than teams
which has done the lower scores. The effective
actions have mean that agents’ action reduced
damages from disasters and fires. From them, we
have confirmed that Team J can achieve the best
score of them.
Table 2: Proportions of types of agents in each teams.
NAMES OF TEAM TYPE-A[%] TYPE-B[%] TYPE-C[%]
Team D 34 33 33
Team E 50 25 25
Team F 25 50 25
Team G 25 25 50
Team H 20 40 40
Team I 40 20 40
Team J 40 40 20
IntroductionforInstructionsHeteroSensitivityofPheromonewithAntColonyOptimization
307

Table 3: Results of scores in evaluation experiment I.
Team D Team E Team F Team G Team H Team I Tea
m
J
1
21.163
20.190 17.967 21.163 20.833 16.428 21.161
2 17.845 19.787 21.036 17.845 19.505 16.429 22.308
3 19.760 18.853 21.612 19.760 18.743 16.419 20.850
4 19.610 18.634 19.024 19.610 18.126 16.869 22.391
5 18.663 17.827 18.818 18.663 20.508 21.128 22.936
Averages 19.408 19.058 19.691 19.408 18.247 17.453 21.929
5 EVALUATION EXPERIMENT II
5.1 Procedures
We have prepared six maps and scenarios for
RoboCup rescue simulation. They have used in
RoboCup 2012 international competition and
RoboCup Japan Open 2013 competition (RoboCup
Web Site), (RoboCup Japan Open Web Site).
Map 1: a map is a part of Ritsumeikan University
area and a score is 84.772 at the start of
simulation.
Map 2: a map is Virtual City and a score is 150.948
at the start of simulation.
Map 3: a map is a central part of Paris and a score is
140.000 at the start of simulation.
Map 4: a map is a central part of Istanbul and a
score is 67.000 at the start of simulation.
Map 5: a map is a central part of Mexico City and a
score is 106.000 at the start of simulation.
Map 6: a map is a central part of Eindhoven and a
score is 183.000 at the start of simulation.
5.2 Results
Table 4 shows results. In this table, Team J and
Team A are equal to previous teams in Preliminary
experiment and evaluation experiment I.
Table 4: Results of scores in evaluation experiment II.
Team J Team A
Map 1 12.350 6.976
Map 2 20.401 10.787
Map 3 38.408 27.640
Map 4 28.078 15.136
Map 5 39.808 35.785
Map 6 47.298 24.902
Averages 39.077 27.608
6 CONSIDERATION
Figure 2 shows a score chart in Map4 by Team J and
Figure 3 shows a score chart in Map4 by Team A.
They are calculated by a RCRS server programs. In
these score chart, red lines mean total scores in each
step of simulation time, blue lines mean numbers of
civilian agents’ component, green lines mean rates
of civilian agents’ health, yellow lines mean number
of civilian agents alive, pink lines mean a rate of
buildings damage and aqua line mean building
damage. We have considered that actions of
preventing damages by Fire-brigade agents in Team
J are more effective than ones in Team A.
However Fire-brigade agents in Team J have not
prevented damages, perfectly. One of reasons is the
shortage of co-operation between hetero-types of
agents. For example, we could see that there are
some blockades on road in simulation map. Police-
force agents need to remove blockades on the road.
However agents do not know which blockades other
agents want to remove first. Then the agents need to
exchange information each other.
7 CONCLUSIONS
We have reported results of evaluation experiments
in multi-agent system using our proposed method.
From comparing between two teams in RoboCup
Rescue Simulation system, we have confirmed the
effectiveness of our method and we have considered
agents’ actions which are decided by our algorithm.
However there are some problems to resolve in our
method. Then we have a plan to develop agents
installed our proposed algorithm on hetero-type
agents and realize co-operation between hetero-type
agents using pheromone communications.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
308
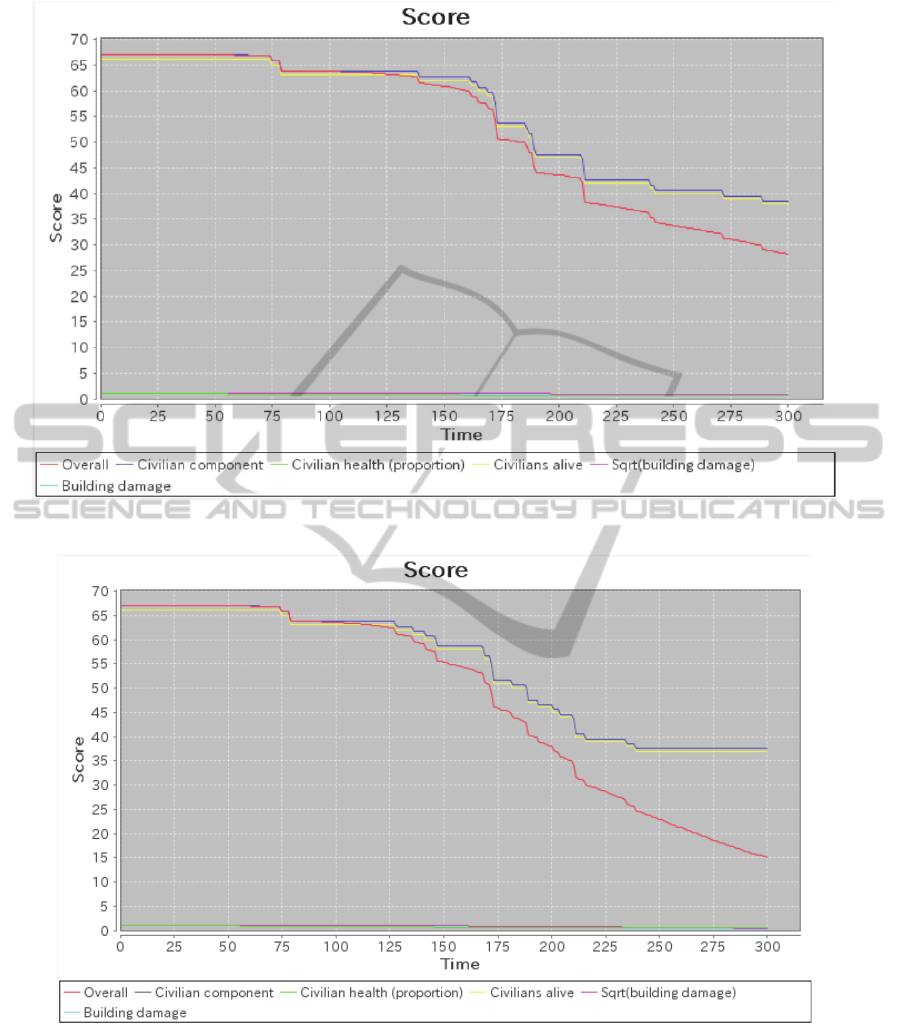
Figure 2: Score of Team J in Map4.
Figure 3: Score of Team A in Map4.
ACKNOWLEDGEMENTS
This work was supported by Grant-in-Aid for
Scientific Research (C) (KAKENHI 23500196).This
work was also supported by TUT Programs on
Advanced Simulation Engineering.
We developed our experimental system with the
agents, which are based on source codes included in
packages of simulator-package file. Moreover we
employed some maps for RoboCup Rescue
Simulation system in evaluation experiments.
IntroductionforInstructionsHeteroSensitivityofPheromonewithAntColonyOptimization
309

REFERENCES
Gordon, D. M., 1999. Ant at Work, The Free Press. New
York.
Keller, L., Gordon, E., 2009. The lives of Ants, Oxford
University Press. New York.
Wilson, E. O., Duran, J. G., 2010. Kingdom of ants, The
John Hopkins University Press, Baltimore.
Dorigo, M., Maniezzo, V., Colomi, A., 1996. The Ant
System: Optimization by a Colony of Cooperating
Agents. In Trans. System, Man Cyber., B-26, pp. 29 –
41, IEEE.
Stützle, T., Hoos, H. H., 2000. MAX-MIN ant system,
Future Generation Computer System 16(8), pp. 889 -
914.
Bonabeau, E., Dorigo, M., Theraulaz, G., 1999, Swarm
Intelligence From Natural to Artificial Systems,
Oxford University Press, New York.
Bonabeau, E., Dorigo, M., Theraulaz, G., 2000,
Inspiration for optimization from social insect
behaviour, Nature, vol. 406, Number 6791, pp. 39-42.
RoboCup Project Web Site. Paper, http://
sourceforge.net/projects/roborescue/.
Sasaoka, H., 2013, Evaluation for Method for Agents’
Action Using Pheromone Communication in Multi-
agent system, Journal of Machine Learning and
Computing, Vol.3, No1, pp. 103- 106, IACSIT Press.
Ishii, Y., Hasegawa, E., 2013, The mechanism underlying
the regulation of work-related behaviours in the
monomorphic ant, Myrmica kotokui, Journal of
Ethology January 2013, Vol. 31, Issue 1, pp 61-69.
Sasaoka, H., 2013, Effectiveness of Ant Colony
Optimization with Agents Implemented into Different
Algorithms for Dispersing Pheromone in RoboCup
Rescue Simulation System, Journal of Japan Society
for Fuzzy Theory and Intelligent Information, ( in
printing ), Japan Society for Fuzzy Theory and
Intelligent Information.
RoboCup Japan Open Web Site, http://
www.tamagawa.ac.jp/robocup2013/.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
310
