
Robots Collaboration based on Cloud Robotics System for Daily
Emergency Life
Buribayeva Gulban and Taizo Miyachi
School of Information Science and Technology, Tokai University,
4-1-1 Kitakaname, Hiratsuka, Kanagawa 259-1292, Japan
Keywords: Cloud Robotics, Robots Collaboration, Emergency Situations, Daily Life, Emotion Recognition,
Awareness.
Abstract: A person should solve unpredictable problems and evacuate from difficult emergency dangers by
himself/herself. These days many different tasks can be solved by robots. However difficult tasks need more
information in serious changing environments and human minds which are shared by robots and cloud
servers can achieve this greater information. We propose a robot collaboration methodology in a cloud
robotics computing system that can enable a robot with few resources to solve the difficult problems in both
human daily life and emergency situations and provide users with useful awareness. We discuss how robots
collaborate utilizing cloud robotics capabilities in order to exchange data/contexts and to find candidate
solutions and create maps for emergency evacuation. We also discuss experimental results by a prototype of
robot system for daily/emergency life.
1 INTRODUCTION
A person should solve unpredictable problems and
evacuate from difficult emergency by
himself/herself. Nowadays, robots are not only toys
for children, but they are also useful tools for people
of all ages in many situations. They are useful for
health rehabilitation, rescue, robots for dangerous
tasks, housekeeping robots and so on. Over the past
few years in the field of information technology has
evolved a new paradigm - cloud computing.
Although cloud computing - a special way to
provide computing resources has caused a revolution
in the methods of providing information and services.
A similar revolution in collaboration between robot
and human utilizing the cloud computing that is
called "Cloud robotics" (James, 2010). A robot with
sensors and actuators interacts with the environment.
Sensor data become useful feedback for making
decisions of next effective action of the robot. This
reduces the load on the computing power of the
robot, as well as reduces the cost of the robot. Maps
of sensor data show the locations of robots and some
contexts in the serious environments. We discuss an
autonomous robot in daily life as well as in
emergency situations, like an earthquake, based on
the cloud robotics. We also discuss experimentation
by prototype of autonomous robots.
2 EMBEDDED INFORMATION IN
DAILY LIFE AND
EMERGENCY TIME
Inconvenient information for a person is often
concealed in daily life even in ubiquitous computing
society. People can acquire a limited volume of
useful information in a disaster. Humans need
intelligent assistants in order to remind them of
important issues and solve suspended problems.
In the case of daily life, the parents should look
after the child, although they are very busy and are
not always able to find the change in their child’s
grades. Some children don’t want to tell their
parents about their grades or in another case some of
them can just forget to tell their parents about the
note from their teacher. Skipping this information
will be a problem for the children’s study, because
parents can think that their children go to the school
every day and everything is fine with them. In this
daily life situation a robot will be useful for the
people.
In case of disaster situation it's very vital for
people to be informed to quickly evacuate from a
435
Gulban B. and Miyachi T..
Robots Collaboration based on Cloud Robotics System for Daily - Emergency Life.
DOI: 10.5220/0004940604350440
In Proceedings of the 10th International Conference on Web Information Systems and Technologies (WEBIST-2014), pages 435-440
ISBN: 978-989-758-023-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
dangerous area. Some human nature has negative
effect such as panic, "normalcy bias," "catastrophe
forgetting" and this will be reason of making
mistakes like wrong staying zone(not safe), not
effective route to get to safe places. Some people are
thinking that their place (house) is strong and it isn't
necessary to be evacuated. Robots with cloud can be
an intelligent assistant for humans. We discuss robot
rules in order to avoid these problems by providing
real-time information and to help people get to the
safe please as soon as possible.
3 ROBOT COLLABORATIONS
AND AUTONOMY FOR
EFFECTIVE SOLUTIONS
Robot network system has two sets of collaboration
frameworks in (A) daily life and (B) disaster
evacuation.
A robot should acquire trust from its owners, and it
should also contribute to the owners in both cases
(A) and (B).
A robot has mainly six kinds of "Autonomy" for
both daily life and emergency evacuation.
Daily Life. (1) Relative analysis, (2) Best solutions
in each field, and (3) creation of motivation.
Emergency Evacuation. (4) Universal solutions in all
approaches, (5) Embedded information, and (6)
Psychological assist
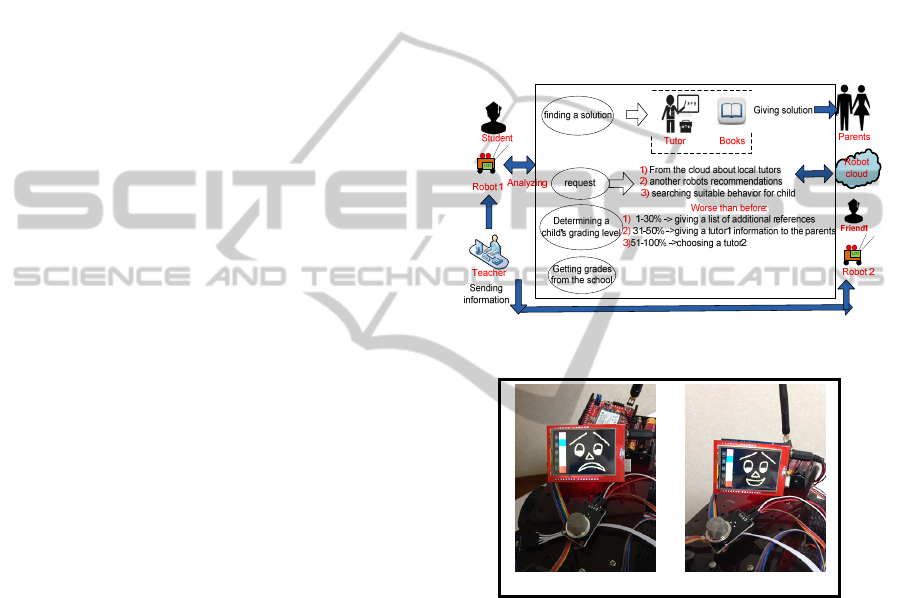
3.1 Daily Life Awareness: Learning
Management by Relative Analysis
A student should have good motivation and actively
proceed in his/her learning. When a student gets low
grades on their examination a personal robot
discovers weak points of its owner, like serious
results on a test and can autonomously find good
reference books and tutors in the cloud servers
corresponding to the level of serious grade. It will
keep communication between teachers and parents
open. The robot acquires the latest grades and
analyzes contexts of changes of the grade. The robot
also autonomously analyzes the reasons of the
serious grade of the student based on the change of
grades of the student's friends. Then the robot
suggests these solutions to the parents:
If the result of the examination is worse than 1-
30 %, it recommends a list of textbooks for
improvement to help the student prepare for the next
exam. The robot makes a request list of textbooks
from cloud robotics.
If the result is worse in the 31-50 % that gives a
list of tutors number 1, with a score worse than 51-
100 % is another solution that can be given to
parents by the robot to improve the test results of the
child.
The parent can consult with the student utilizing
candidate solutions. Daily assessment of students,
teacher’s notifications, school events will be saved
in the cloud robotics. Related with the student
achievements the robot will give advice to parents
by analyzed data. It will be easier for parents to be
informed about their children at the school. (see Fig
1).
Figure 1: Learning management by robot collaboration.
F1 F2
Figure 2: 80 faces of robot. Emotions such as F1 (joy 1.0
and sadness 0.4) and F2 (joy 0.4 and sadness 1.0).
3.2 Emergency Awareness Avoiding
Danger
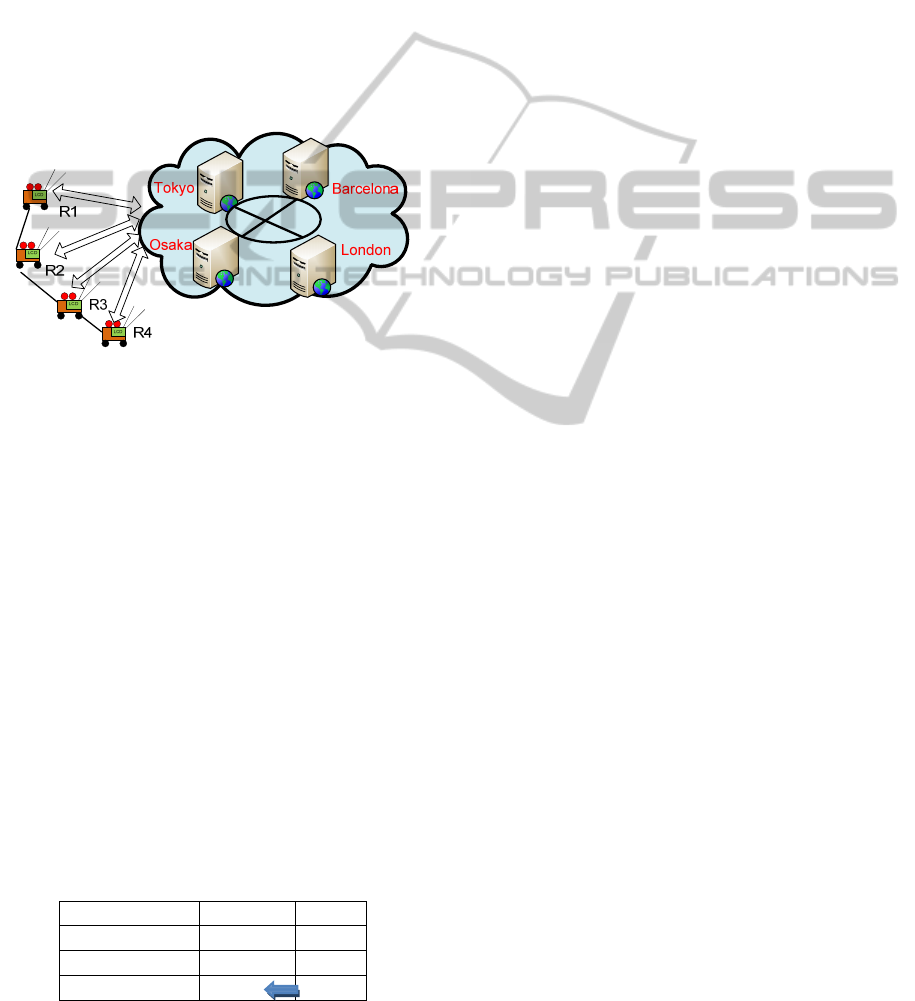
3.2.1 Communication between Robots and
the Cloud by using Clone-based Model
Flexible adaption against sudden attack of disaster
need autonomous actions of each robot. We propose
"Clone-Based Model" for collaboration between
Robots and cloud with redundant servers (see Fig 3).
"Clone-Based Model: each robot has a
corresponding system- level clone in the cloud. A
task can be executed in the robot or in its clone. The
set of robotic clones also form a peer-to-peer
network with better connectivity than the physical
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
436
ad-hoc M2M network. Moreover, this model allows
for sporadic outage in the physical M2M network"
(Guoqiang, 2012).
Robots and cloud share the data and history of
the data. The shared data enables them to analyze
Big Data.
For example, serevers in Tokyo would be broken
by a disaster. Then the robots can send and receive
information from the server in Osaka . Parallel
backup data is necessary because we can not
imagine the destructive force of the earthquake .
Robots R1 (west area), R2 (east area), R3 (north
area), R4 (east area) are in the local area and should
autonomously detect risks and share them. (see Fig
3).
Figure 3: Clone-Based Model of robot collaboration
system.
(rc1) All robots will upload new sensors data to the
cloud. In parallel all servers(clones) will get new
sensors data from the robots.
(rc2) The cloud will collect real- time photos of
situatuions and can send these to the robots.
(rc3) The robotic cloud computing will make an
evacuation map in accuracy by using data from the
J-SHIS and the robots.
(rc4) By using updated data the robotic cloud
computing can prepare an optimal route for each
robot's owner.
Robot and cloud robotics have reliable
management functions of change of context in each
field. It has three historical types of data: "old",
"current" and "new"(see Table 1). In a disconnection
situation case the robot gets new data at its current
place from the cloud it also takes the latest data of
the other 100 related objects from the cloud robotics.
Table 1: Data states during disconnection situation.
robot cloud
Old data 1 1
Current data 1 1
New data 0 1
(1) Robot Assists based on Cloud Information.
Evacuation Guide. Robot uses two types of
earthquake sensors. A swing sensor in its body and
P-wave sensor attached to a wall or fixed pole. P-
wave sensor detects the first wave (P-waves) of an
earthquake. This p-wave sensor data from "Quake
Alarm" device will send to the cloud by WiFi
modems. The robot responds to the previous
earthquake compression waves which are inaudible
to humans because the frequency of the wave is less
than 20Hz, just animals can react to this type of
wave. The robot analyze two kinds of sensor data by
inner swing sensor, P-wave sensors, and general data
from J-SHIS, and make a quick decisions for
evacuation's actions from a wide area point of view.
J-SHIS can provide a general evacuation map. In
case robot they can give information about real-time
safety places. These two maps will be different.
Because in general evacuation map they are 5
nearest safety places with routs, but some places can
already damaged and the robot "A" will send this
damage to the cloud. By comparing two maps the
cloud can make decision and provide evacuation
map with effective routs. Also most of residents may
not know second safety place. The robot will be
used as an evacuation guide with evacuation map.
Most Japanese people think it is not necessary to
evacuated before/after first wave of earthquake since
Japanese houses are usually strong for seismic
activity. They stayed in the houses.
Rules of robots during earthquake:
I. Providing information about the first wave and the
next wave of earthquake
II. Reducing psychological forgetting (panic) of
people
III. Making evacuation map and effective route to
safety place by using big data from the robotic cloud.
IV. Providing real-time information about local area
to people and J-SHIS.
(2) Normalcy Bias. In The Great East Japan
earthquake about 70 % of residents did not evacuate
although they knew the tsunami warning of the
government in text and reading out by an announcer.
That is why only giving warning of tsunamis is not
enough since the citizens have been safe for 38 years.
They believe it would be enough that only playing
no serious damage by tsunamis. They need to
acquire the motivation and chance to start
evacuation from the giant tsunami.
Visual information allows residents to quickly
understand serious situations and to make the
decision to leave their houses. Such photos/video
(see Fig. 6) of running to the safe place enables
residents to avoid psychological disorders such as
RobotsCollaborationbasedonCloudRoboticsSystemforDaily-EmergencyLife
437

normalcy bias and catastrophe forgetting (Miyachi,
2013) and quickly start evacuation in the safe
direction. We propose 5 seconds duration video
(photos) that show evacuation actions by people who
already have evacuated in real-time by the robot. To
avoid this kind of psychological problem the robot
can change faces corresponding to the degree of an
impending earthquake (see Fig. 2) (Schmitter, 2008)
and also showing real-time pictures from another
robots about people evacuation.
(3) Contribution to Japanese Earthquakes.
Earthquakes usually cause fire, since Japanese
houses are built by wood and there are many
restaurants in the towns in a same street. If strong
winds expand the fire over the first shelter, residents
should change the place of refuge from the first safe
place to the second safe place and know safe routes
to get there. Most residents do not know such
information. The robot should show the residents the
second safe place and the safe route while sensors of
robot are detecting dangers for safe mobility to the
safe place. Fallen concrete block, fire in the old
wooden houses, road collations, and evacuation
ability of aged persons should be provided by the
robot and knowledge in the cloud servers.
(4) Contribution to Kazakhstan Earthquakes.
There are a lot of industrial companies in Almaty
city (see Fig. 4). Each of them can become
flammable zones (green icons-flammable zones and
blue icons-safety places, yellow icon -person's
house). In case of a person's house being near the
industry area the robot would recommend to go to
the place "A0" considering the strong north wind.
Robot could find a safe direction and safe places to
evacuate based on the direction of the wind from
server of "National Hydrometeorological Service of
the Republic of Kazakhstan". Robots should have
"decision table for safe direction/safe place" in order
to quickly find them. The decision table becomes an
explanation of why the decision would be the best
solution.
3.2.2 Collaboration between Robots without
Cloud
This communication allows robots connect with
each other without cloud access point by wireless
communication, such as WiFi module or WiMax etc.
The Robot R1 is near dangerous are (fire,gas etc) R1
will send a request about area to the friends robot R2
(neareast robot). If the R2 will be near not safety
place , the R1 will recomendate to an owner to
leave area near R1 and R2.
Figure 4: Google map. Almaty city with flammable zones.
(rr1) A robot autonomously gets sensor data and
detects danger.
(rr2) A robot communicates with a robot near it and
checks whether the other robot has similar situation
or not when it detected the danger.
(rr3) A robot also sends the other robots awareness
of such danger that it detected.
(rr4) A robot shows its owner awareness with the
information from the robot that detected the danger.
Data exchanging between robots without the cloud is
should be simple to save memory and computation
resources. Robot R1 will get data from robot R2 in a
table. The table includes information: which robot
(ROBOT_ID), in which area (AREA_ID), has what
kind of situation (earthquake, tsunami, fire etc)
(SITUATION_ID), when (TIME), what is data
(DATA) and situation level (DANGER_LEVEL).
A good point of this communication is that it
enables robots to autonomously find specific areas
and minimal additional computation and memory
resources.
4 EXPERIMENTS
Experiment 1. Learning management by Student's
Grade. The robot found good reference books and a
tutor for the weak points of the student based on
collaboration with friend's robots through the cloud
robotics system. The robot could recommend the
parent the best reference books and the tutor for
characters of the child.
Subjects: International Students (between 24 and 33
years old)
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
438

Question1. "What kinds of recommendations (A:
books, B: tutors, C; books and tutors) do you give
for each cases of students to improve their grades?”
Case 1: one student's grade decreased and the other
student's grades did not change
Case 2: Half of the student's grades decreased and
other student's grades did not change
Case 3: All students’ grades decreased.
We found that all international students expect to
get tutors and books in case 3. In case 2 we see that
about 70% of subjects needed good tutors although
half of subjects decreased the grades. We could
make sure that the awareness with candidate of
tutors for parent would become useful in case of
both case 3 and case 2. International students might
be very sensitive for decrease of the degree. More
than 63% of the students can study by themselves in
case 1.
Figure 5: Preferred awareness for the level of grade.
Experiment 2. Avoiding Psychological Disorders
As we discussed in section 3 about providing real-
time video (photos) with name of area by different
areas robots it will be shown on a TFT LCD as in
below figure 6.
Figure 6: Simulation showing photos in case evacuation.
Experiment 3. Autonomous robot detection based
on crone model. The types of sensors are fire, gas,
rain/snow, ultrasonic, and shaking (see Fig 7).
The robot could detect fire, gas, rain/snow,
ultrasonic, and shaking (see Fig. 8).
All sensors (see Fig 8) were attached on the
Arduino Uno board. Arduino is a hardware
computing platform, the main components are
simple input-output board and a development
environment for language Processing/ Wiring.
Figure 7: Sensors.
Figure 8: Detecting fire and rain .
Programming language is C. Initial step of
experiment was with fire, raining sensors. Fire
detection is necessary for emergency situations to
avoid flammable zones. Robot showed messages
such as "No fire"/"Fire". Rain detection is also
useful to analyze weather in case of fire situation can
be changed. "No rain"/ "Raining" on the LCD
display corresponding to the rain detection.
Experiment 4. Emergent Awareness between
Robots. We experimented communication (data
exchanging) between the robot and computer with
fire sensor through Bluetooth channel. We used for
the robot a "Slave HC-06 Wireless Bluetooth RF”
module to send sensor data to a computer terminal
and for the computer “Tera Term" a terminal
emulator. When the robot could detected fire (see
Fig 8) on the Tera Term we see text "Fire area" in
case detecting "no fire" on the terminal we see the
text "Safety" (see Fig 9). In the next step a Bluetooth
module will be replaced with WiFi module also
instead of a terminal emulator we will use a web
server.
5 CONCLUSIONS
In this paper we propose robots collaboration system
based on cloud robotics that provides useful
awareness for unpredictable problems. We discuss
how robot collaboration works in both daily life and
emergency life. We also discuss six kinds of robot
autonomy and awareness based on relative analysis.
RobotsCollaborationbasedonCloudRoboticsSystemforDaily-EmergencyLife
439
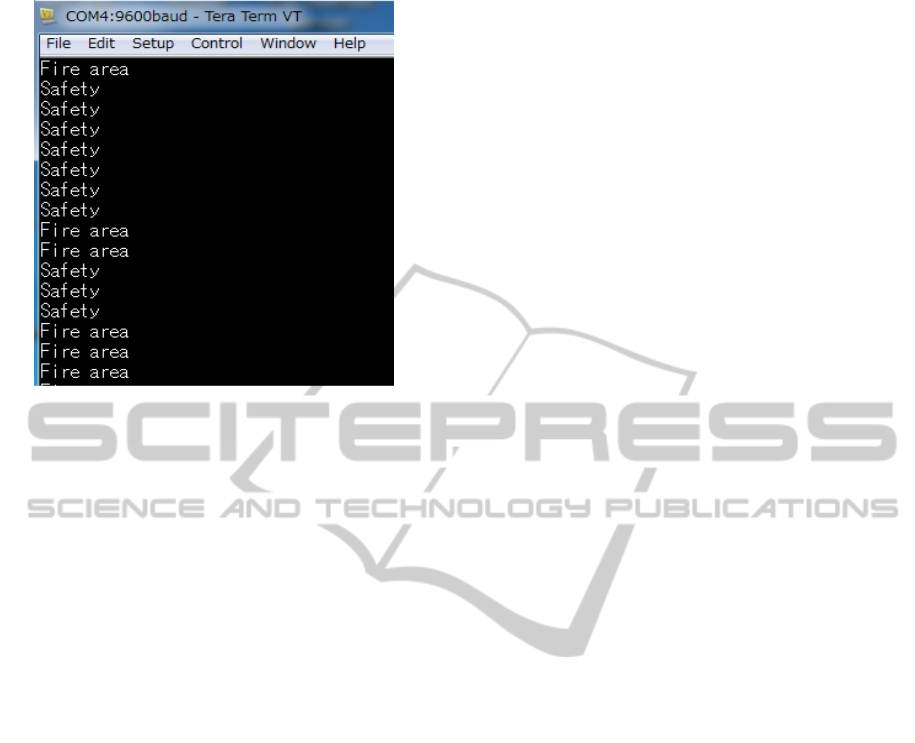
Figure 9: Tera Term is getting signals from the robot's fire
sensor through Bluetooth channel.
We made a prototype of a robot system. By
detecting fire/dangerous gases and sending these
signals to the computer via Bluetooth channel. In
addition, we did simulations by creating various
faces for the robot that can be used to express the
robot’s emotions depending on the situations and
changing real-time photos on TFT LCD to avoid
human psychological disorders.
Our next step will be by using "p wave" sensor to
detect the first wave of earthquake and sending this
signal to the server by using SainSmart WiFi
Wireless Shield WizFi210. Also we will make a
second similar robot to test collaboration with each
other. Then we will check how the robot will make
an evacuation map by using data about the first wave
of earthquake and signals from other sensors like
radiation etc. from the server. Also we are going to
use emotion recognition with Kinect and voice
recognition system that the robot can understand
voice commands.
REFERENCES
Ben Kehoe, Akihiro Matsukawa, Sal Candido, James
Kuffner and Ken Goldberg, 2013. Cloud-Based Robot
Grasping with the Google Object Recognition Engine.
IEEE International Conference on Robotics and
Automation(ICRA).
Caroline Schmitter and Ryosuke Masuda, 2008. Research
on multiple facial expression of robots, Journal of the
School of Information Science and Technology. Tokai
university. Vol XXXIII.
Dominique Hunziker, Mohanarajah Gajamohan, Markus
Waibel and Raffaello D’Andrea, 2013. Rapyuta: The
RoboEarth Cloud Engine, http://
roboearth.org/uploads/RCE2013.pdf.
Guoqiang Hu, Wee Peng Tay, and Yonggang Wen,2012.
Cloud Robotics: Architecture, Challenges and
Applications. IEEE Network May/June 2012.
James J. Kuffner, 2010. Cloud-Enabled Robots, IEEE-RAS
International Conference on Humanoid Robotics.
LaBar KS, Disterhoft JF ,1998. Conditioning, awareness,
and the hippocampus. Hippocampus 8 (6).
McCloskey, M. and Cohen, N.,1989.Catastrophic
interference in connectionist networks: The sequential
learning problem. in G. H. Bower (ed.) The
Psychology of Learning and Motivation: Vol. 24, 109-
164, NY: Academic Press.
Miyachi T., G.Buribayeva, Saiko Iga and Takashi
Furuhata, 2013. Evacuation Assist from a Secquence
of Disaster by Robot with Disaster Mind.
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
440
