
Detection and Tracking of the Human Hot Spot
Carlos M. Travieso
1
, Malay Kishore Dutta
2
, Jordi Solé-Casals
3
and Jesús B. Alonso
1
1
Signal and Communications Department, The Institute for Technological Development and Innovation on
Communications, University of Las Palmas de Gran Canaria, Campus Universitario de Tafira, sn,
Ed. de Telecomunicación, Pabellón B, Despacho 111, E35017, Las Palmas de Gran Canaria, Spain
2
Department of Electronics and Communication Engineering, Amity School of Engineering & Technology,
Amity University, Noida, India
3
Computer Science Department, Univesitat of Vic,Victoria, Spain
Keywords: Soft-biometrics, Human Detection by Hot Spot, Thermal Image, Pattern Recognition.
Abstract: This work presents an algorithm that receives as input a stream of thermal imaging detects heat sources
present in them and classify them according to their mobility. After performing the experiment and given
the results, it is concluded that the algorithm performed is able to discern and classify the different types of
human bodies as long as you can provide a set of detection parameters adjusted to the situation, indoor or
outdoor; and with one or more persons.
1 INTRODUCTION
Capturing images in the infrared spectrum and its
subsequent processing is as diverse as the detection
of forest fires (Liew et al., 2005) areas (Vodacek et
al., 2005) applications of hot spots in electrical
networks (Ishino, 2002) (possible indication of a
short circuit, as it is shown in figure 1) of buried
landmines (Carter et al., 1998; Azak et al., 2003) and
focusing a bit on people, face recognition (Heo et
al., 2005; Socolinsky & Selinger, 2004; Jiang et al.,
2004) of facial expressions and gestures (Jiang et al.,
2005) of positions (Iwasawa et al., 1998; Imai et al.,
1993) or even biometric features such as the
arrangement of veins in the hand (Lin and Fan,
2004).
Figure 1: Hot spots in a grid.
Infrared detection supplements (and in some cases
could replace) conventional video surveillance
because, while relatively easy to hide in the eyes of
others, not so much thermal radiation hide all bodies
emit. As mentioned , the present design aims to
design a system to detect heat sources in a scene and
which is able to track the same, by means of a CCD
camera operating in the IR band.
Although the heat source can be anything that is
at a certain temperature, the application will be
developed oriented to the detection and tracking of
people, making it a system of monitoring and / or
control regions.
A surveillance system of this type could be used
to monitor the check-in counters at an airport, access
to large areas like stadiums or shopping malls,
parking for an office or a building block, the waiting
section hospital emergency ... in general, all those
places with large crowds.
In this project the development of an algorithm
that, starting in the infrared spectrum captured
scenes then rated heat sources present pursued. This
classification is based on whether the foci remain in
the same position and in the same way all the time or
not.
2 USE OF THE THERMAL
SENSOR
To capture thermal images and the construction of
the database has been used a video camera company
Guangzhou SAT Infrared Technology Co. (SATIR),
325
Travieso C., Kishore Dutta M., Solé-Casals J. and B. Alonso J..
Detection and Tracking of the Human Hot Spot.
DOI: 10.5220/0004941703250330
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (MPBS-2014), pages 325-330
ISBN: 978-989-758-011-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
SAT-280 model (see figure 2). This camera comes
standard with features like interesting presentation
profile or isothermal heat. It is capable of making
measurements at specific points of the stage,
designated by the user, or in areas of rectangular
profile. However, regarding the development of the
algorithm, only interested in the image.
Figure 2: Used IR camera and capture a person.
Regarding the capture settings , it was decided to
establish an ambient temperature of 25°C and
relative humidity was set at 0% because the idea was
to study and common everyday situations. Since it is
expected to find hot spots at different distances,
about the parameter (default is 1 meter) was
avoided. The emissivity of an object or surface is the
ratio of thermal radiation that is capable of
absorbing or emitting from that of a black body
equal and varies between 0 and 1, the latter being the
value for a perfect thermal emitter (Cromer, 1985).
The human body has an emissivity of about 0.97 and
does not change only the color of the skin. Under the
conditions of employment provided, not some
variation was observed in the imaging parameter to
modify the emissivity so it was left to the default
value, unity.
Presentation settings were used regularly the
LEVEL and SPAN as the needs of the algorithm did
not include regions of interest previously
established. Neither wanted to do prior segmentation
temperatures.
Table 1: Daytime measures, focus at 3 meters.
Distance
(m)
Focus
LEVEL
(ºC)
SPAN
(ºC)
Comment
3 * 27 13 Acceptable
5 NO 27 13 Acceptable
8 NO
27
30
13
13
Confusion
with ground
Acceptable
10 NO 30 13 Acceptable
15 NO
30
35
13
16
Confusion
with ground
Acceptable
Before capturing images, tests were performed in
an outdoor environment during the morning.
Table 2: Daytime measures, focus at 15 meters.
Distance
(m)
Focus
LEVEL
(ºC)
SPAN
(ºC)
Comment
3 NO 30 13 Regular
5 YES 30 13 Acceptable
8 YES 30 13 Acceptable
10 YES 30 13 Acceptable
15 *
30
35
16
16
Acceptable
Confusion
with ground
And then tests were conducted in an indoor
environment.
Table 3: Measures night, focus at 3 meters.
Distance
(m)
Focus
LEVEL
(ºC)
SPAN
(ºC)
Comment
3 *
27
30
13
13
Confusion
with ground
Acceptable
5 NO 30 13 Acceptable
8 NO 30 13 Acceptable
10 NO 30 13 Acceptable
15 NO 30 16 Acceptable
Table 4: Measures night, focus at 15 meters.
Distance
(m)
Focus
LEVEL
(ºC)
SPAN
(ºC)
Comment
3 NO 30 13 Acceptable
5 NO 30 13 Acceptable
8 YES
30
27
13
13
Acceptable
Confusion
with ground
10 YES 30 13 Acceptable
15 *
30
27
13
13
Acceptable
Confusion
with ground
Finally it was decided to perform detection based on
the fact that the algorithm would be used in
potentially changing scenes, that is, with hot spots
appearing and disappearing of them, in the most
general case. So to develop the algorithm is first
recorded sequences of frames and then some videos.
This has been referred to a frame sequence number
of images relating to a scene. They are distinguished
from the videos because the rate of frames per
second in the sequence of frames is less than one.
Based screening uptake levels of certain temperature
and changing information between keyframes is
showed when constructing an algorithm with
satisfactory results. The camera has its own memory,
but it could just shoot snapshots , so that it became
necessary to connect the video output of the camera
to a video capture card. The card used is a PCMCIA
Card Imaging, Impex Inc., model VCE- B5A01 and
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
326
is connected to a laptop Aspire 1600 Series, MS2135
model with Windows XP. The card software
includes a simple program that can display the
contents of the video input card. The captured video
can be saved as sequences of frames or video file. In
a line of work sequences of frames in which scenes
were captured at a rate of frames per second less
than unity, ie that passed between frames over a
second were used, about a second and a half. These
sequences, while useful to some extent, were
eventually discarded and finally recorded a few
videos in AVI format at a rate of 14 frames per
second. Mainly due to disk space limitations, short
sequences of less than one minute duration were
recorded.
Eight thermal videos were recorded with the
described capture device. Indoor and outdoor
scenarios were used; and the focus goes in one
motion. The main characteristics of each video are
summarized in the following table 5.
The first column gives the name of the video in
code, in the second column duration (time) is given
in seconds and the third a brief description.
The videos were recorded during daylight hours.
The camera was focused on objects eight to ten
meters. The LEVEL and SPAN values were set to
(L: 30, S: 13). The format is AVI videos, all have a
rate of 14 frames per second and a size of 325 x 288
pixels.
Table 5: Description of the thermal videos.
Name Time Description
ip 9 Interior. A person sitting at a table.
ip2 24
Interior. A person sitting at a table, remains a
few seconds and then it rises.
iev 51
Interior. A person crosses a corridor lit with
fluorescent at different times.
ief 38
Interior. Two people stand before food
machines. Extra people appear and disappear
in the scene.
ep 29
Exterior. The scene is empty much of the time,
except for one person that appears, remains
static for a few seconds and then leaves.
eev 29
Exterior. Scene empty most of the time, except
for one person who crosses a moderate speed.
eef 29
Exterior. A few people move to the back of the
stage. Soon a person is in the foreground, is
fixed a few seconds and then leaves.
eef2 29
Exterior. The scene is empty much of the time,
except for one person that appears, remains
static for a few seconds and then leaves.
3 DEVELOPMENT
OF THE ALGORITHM
So then he decided to create a tool prior calibration.
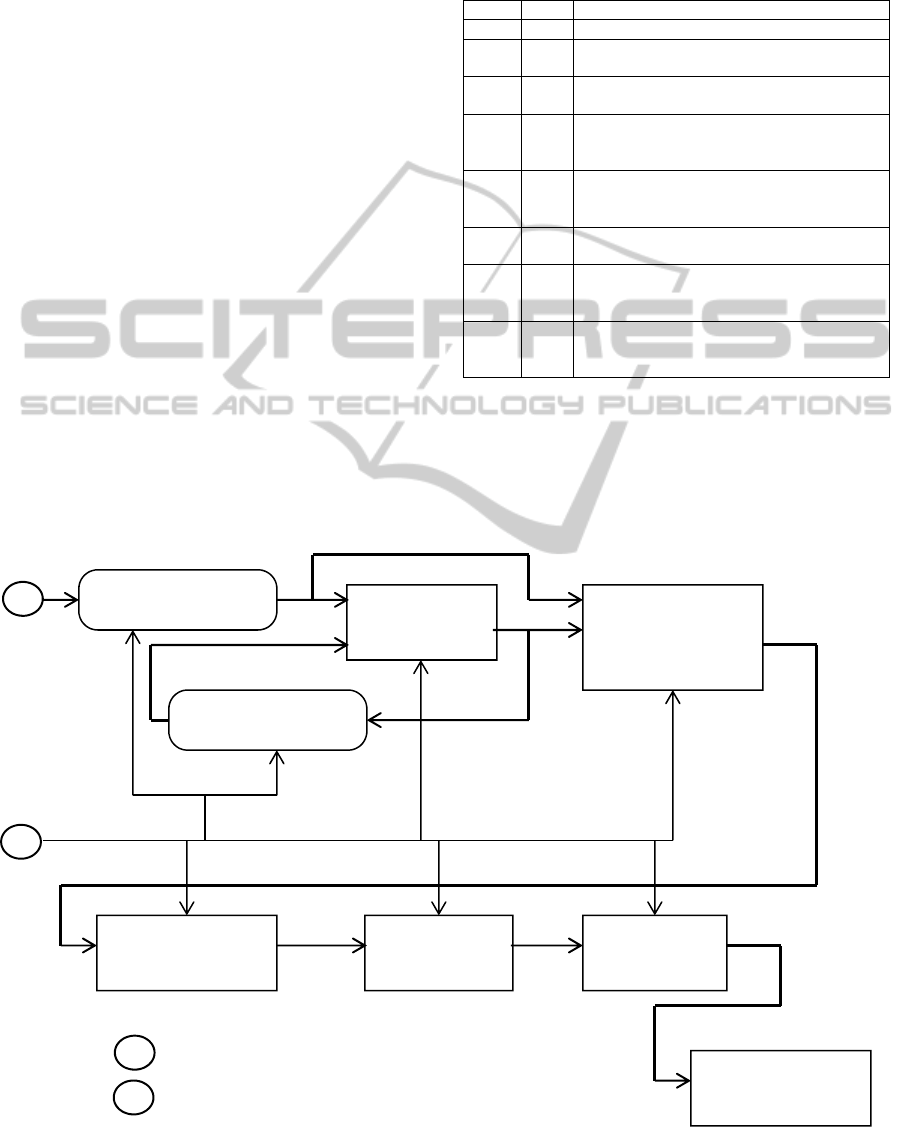
Figure 3: Functionality of the detector algorithm.
BACKGROUNG
GENERATION
PRE-DETECTION
THRESHOLDING ELIMINATION SMOOTHING
FINALISATION
SEGMENTATION
SEGMENTATION
1
Input frames
Parameters of detection
2
1
2
DetectionandTrackingoftheHumanHotSpot
327
With this tool, the user designates (indirectly) the
temperature ranges to be searched. Each user must
analyze for your particular case scenario, choose as
representative situation possible and take a thermal
snapshot. With this calibration image, the user can
develop a set of parameters that the detection
algorithm used for detection. It is also possible (if
the particular case requires) designate areas of no
interest , regions where the algorithm simply discard
the information collected.
With this tool calibration algorithm was
practically finished and adopted the following
structure, identical to the final version. The
description of the subsystems is the following;
Background generation: generates the
background of the current detection information
from the captured frame and the funds generated
in previous detections.
Segmentation: using generated parameters
calibration algorithm to remove information
considered irrelevant.
Pre-detection: subtracts the background
generated segmented frame and passes the result
to grayscale.
Thresholding: set an even clearer difference
between lights and background.
Elimination: performs a clean image, eliminating
small and unimportant areas.
Smoothing: recovers lost data or reconstructed in
previous steps.
Finalisation: classifies heat sources and found a
box marked with different color depending on
the type.
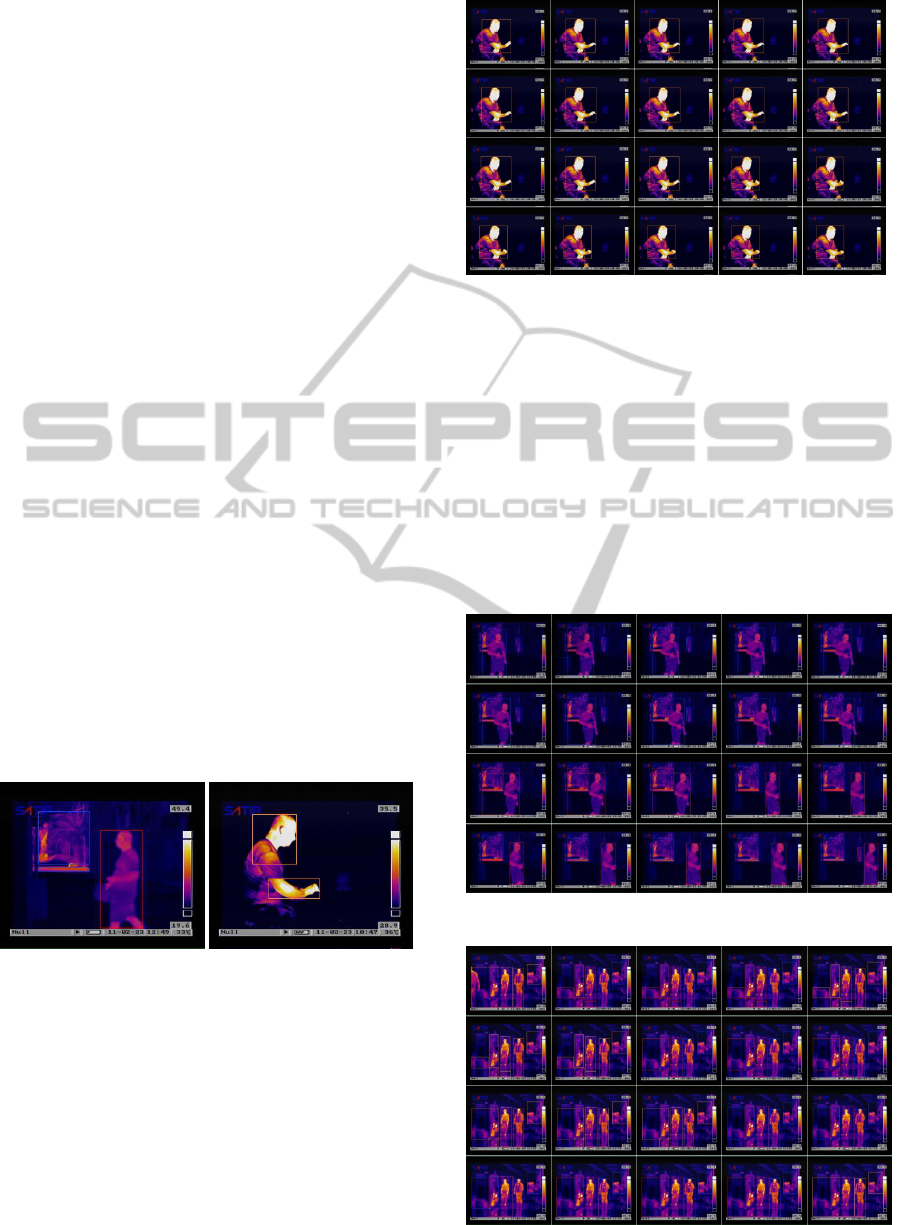
(a) Acceptable detection (b) Improving detection
Figure 4: Detection Effectiveness.
4 RESULTS
Detection is considered "acceptable" if the algorithm
has been able to frame a person properly classify its
evolution, while detection is called "improved" if the
person framing elements are included scenario, if the
figure of a person has been fragmented into more of
a focus, or if its evolution has been misclassified.
Figure 5: Detection of “ip”, frames 99-118.
Some examples for some of the different types of
data recorded in Figures 5-8 are displayed.
Applying these criteria resulted in the videos,
and the parameters of the our dataset the following
table 6 is obtained.
For each video total detections in which people
appear in the second column is specified. In the third
column these detections are distinguished acceptable
in the upper part and the bottom improvable. In the
fourth column the percentage being relative to the
total detections people.
Figure 6: Detection of “eef2”, frames 390-409.
Figure 7: Detection of “ief”, frames 99-118.
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
328
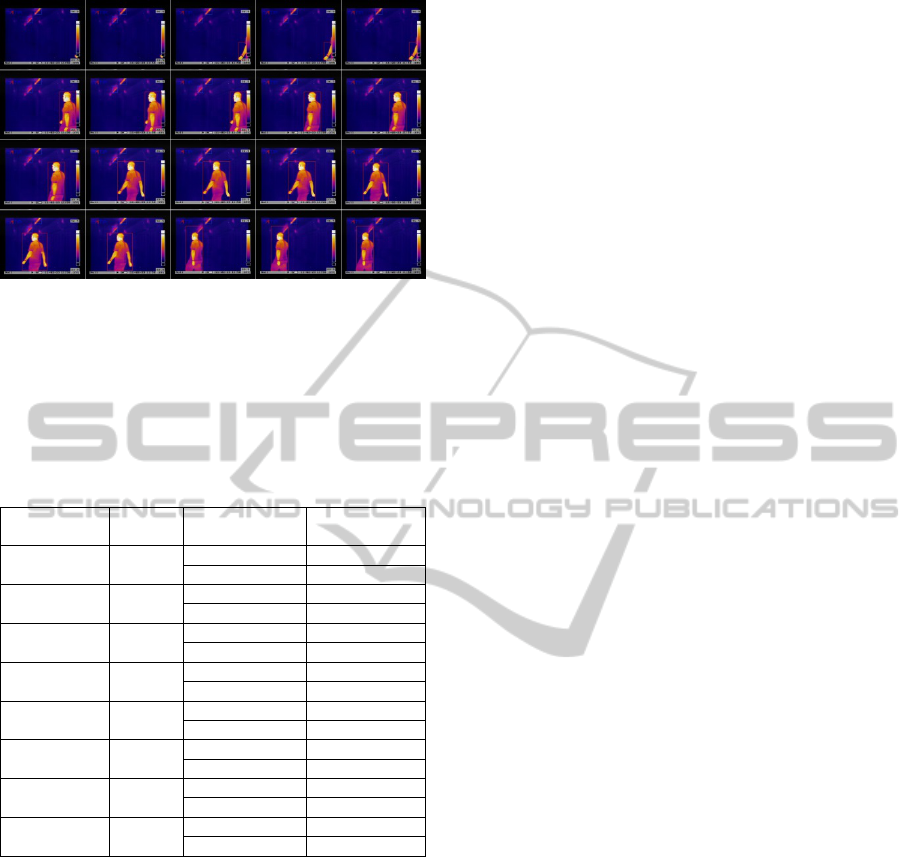
Figure 8: Detection of “iev”, frames 158-177.
It is noted that these criteria, the algorithm does not
seem particularly effective, but if, for example, is
considered an acceptable detection to detect a person
at different points, only for IP and IP2 videos would
be 100% of detections.
Table 6: Accuracy on the person detection.
Type of
video
Total
Acceptable /
Improvable
Accuracy (%)
IP 33
20 60,61
13 39,39
IP2 113
42 37,17
71 62,83
IEV 86
38 44,18
48 55,81
IEF 121
35 28,93
86 71,07
EP 45
8 17,78
37 82,22
EEV 12
12 100
0 0
EEF 73
2 2,74
71 97,26
EEF2 85
8 9,41
77 90,59
5 DISCUSSION
AND CONCLUSSIONS
This work has developed an algorithm detector heat
sources. This algorithm needs the support of a
calibration tool , which is a graphical user interface
that generates some of the sensing parameters. To do
this the user must use a fixed thermal image (photo),
representative of the scenario in question. The
sensing device consists of an infrared camera with
its video output connected to the input of an
acquisition card inserted into a computer. Recording
in AVI format generated is input to the algorithm,
which generates a video output with the same
number of frames, and frames per second that the
detected foci are framed by a rectangle. These boxes
can be different colors and indicate the nature of the
sources found. By default, the cuasidinámicos
framed by orange lights, that is, those who are
continuously detected in the scene and whose
position and dimensions vary slightly over time.
They are framed in blue static red lights and
dynamic . When a scene foci appear and disappear
continuously, are considered static those whose
position and dimensions vary slightly detection in
dynamic detection and those whose evolution is
more noticeable.
ACKNOWLEDGEMENTS
This work is supported by funds from The Spanish
Government, under Grant MCINN TEC2012-38630-
C04-02.
REFERENCES
Liew, A.L., Lim, A. Kwoh, L., 2005. A Stochastic Model
for Active Fire Detection Using the Thermal Bands of
MODIS Data. In IEEE Geoscience and Remote
Sensing Letters, Vol. 2, Issue 3, pp. 337 – 341.
Vodacek, A., Kremens, R.L., Ononye, A., Tang, C., 2005.
A Hybrid Contextual Approach to Wildland Fire
Detection Using Multispectral Imagery, In IEEE
Geoscience and Remote Sensing Letters, 43(9), pp.
2115 - 2126.
Ishino, R., 2002. Detection of a Faulty Power Distribution
Apparatus by Using Thermal Images. In IEEE Power
Engineering Society Winter Meeting, Vol. 2, pp. 1332
– 1337.
Carter, L.J., O’Sullivan, M.J., Hung, Y.J., Teng, J.C-C.,
1998. Thermal Imaging for Landmine Detection. In
Second International Conference on the Detection of
Abandoned Land Mines, pp. 110 – 114.
Azak, M.D., Akgün, S., Azak, S.I., Torun E., 2003.
Thermal Detection of Buried Circular Objects with a
Rule-Based Fast Shape Detection Algorithm. In
Proceedings of IEEE Sensors, Vol.2, pp. 765 - 768.
Heo, J., Savvides, M., Vijayakumar, B.V.K., 2005.
Performance Evaluation of Face Recognition using
Visual and Thermal Imagery with Advanced
Correlation Filters. In IEEE Computer Society
Conference on Computer Vision and Pattern
Recognitions, pp. 9.
Socolinsky, D.A., Selinger, A., 2004. Thermal Face
Recognition in an Operational Scenario. In
Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition, pp. 1012 - 1019.
Jiang, L., Yeo, A., Nursalim, J., Wu, S., Jiang, X., Lu,
DetectionandTrackingoftheHumanHotSpot
329

Z., 2004. Frontal Infrared Human Face Detection by
Distance from Centroid Method. In Proceedings of
International Symposium on Intelligent Multimedia,
Video and Speech Processing, pp. 41 - 44.
Jiang, G., Song, X., Zheng, F., Wang, P., Omer A.M.,
2005. Facial Expression Recognition Using Thermal
Image. In 27th Annual International Conference on
the Engineering in Medicine and Biology Society, pp.
631 - 633.
Iwasawa, S., Ebinara, K., Morishima, J.O., Shigeo, 1998.
Real-Time Human Posture Estimation using
Monocular Thermal Images. In 3rd IEEE
International Conference on Automatic Face and
Gesture Recognition, pp. 492 - 497.
Imai, M., Takayuki, N., Shida, T., Sato, M., Ito, R.,
Akamine, I., 1993. Thermal Image Proccesing using
Neural Network. In IJCNN’93, Proceedings of
International Joint Conference on Neural Networks,
Vol. 3, pp. 2065 - 2068.
Lin, C.L., Fan, K.C. 2004. Biometric Verification using
Thermal Images of Palm-Dorsa Vein Patterns. In IEEE
Transactions on Circuits and Systems for Video
Technology, Vol. 14, Issue 2, pp. 199 - 213.
Cromer, A.H., 1985. Física para las ciencias de la vida.
Ed. Reverté. , 2
nd
edition.
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
330
