
A Walsh Analysis of Multilayer Perceptron Function
Kevin Swingler
Computing Science and Maths, University of Stirling, Stirling, FK9 4LA, Scotland
Keywords:
Multilayer Perceptrons, Walsh Functions, Network Function Analysis.
Abstract:
The multilayer perceptron (MLP) is a widely used neural network architecture, but it suffers from the fact
that its knowledge representation is not readily interpreted. Hidden neurons take the role of feature detectors,
but the popular learning algorithms (back propagation of error, for example) coupled with random starting
weights mean that the function implemented by a trained MLP can be difficult to analyse. This paper pro-
poses a method for understanding the structure of the function learned by MLPs that model functions of the
class f : {−1,1}
n
→ R
m
. The approach characterises a given MLP using Walsh functions, which make the
interactions among subsets of variables explicit. Demonstrations of this analysis used to monitor complexity
during learning, understand function structure and measure the generalisation ability of trained networks are
presented.
1 INTRODUCTION
The multilayer perceptron (MLP) (Rumelhart et al.,
1986) is a widely used neural network architecture.
It has been applied to regression, classification and
novelty detection problems and has been extended in
various ways to process time varying data, e.g. (El-
man, 1990). In the field of data mining MLPs are
a common choice amongst other candidates such as
classification trees, support vector machines and mul-
tiple regression. Due to the wide variety of tasks for
which they are suited, and their ability as universal ap-
proximators, MLPs have become very popular. How-
ever, there is one aspect of the MLP that restricts and
complicates its application, and that is the role of the
hidden neurons. A common criticism of the MLP
is that its knowledge is not represented in a human
readable form. The comparison that is often made
is with classification or regression trees, which rep-
resent partitions in the input space explicitly in their
structure. This makes human understanding of the un-
derlying function and the reasons behind any given
output quite easy. Given a picture of a classification
tree, a human may apply it to an input pattern without
even needing a computer to run the algorithm. This is
far from simple with an MLP.
The hidden units in an MLP act as feature detec-
tors, combining inputs from below into higher order
features that are, in turn, combined by higher layers
still. The common learning algorithms such as back
propagation of error (Rumelhart et al., 1986) have
no explicit means of ensuring that the features are
optimally arranged. Different neurons can share the
same feature, or have overlapping representations. In
networks where each layer is fully connected to the
one above, every hidden neuron in a layer shares the
same receptive field, so their roles often overlap. This
makes analysis even more difficult as hidden neurons
do not have independent roles. The inclusion of addi-
tional layers of hidden neurons compounds the prob-
lem further.
Some work has been carried out on the analysis of
hidden neurons in MLPs. For example, (Kamimura,
1993) used an entropy based analysis to identify im-
portant hidden units (known as principal hidden units)
in a network for the purpose of pruning an oversize
hidden layer. (Sanger, 1989) proposed a method of
contribution analysis based on the products of hid-
den unit activations and weights and (Gorman and
Sejnowski, 1988) presented a specific analysis of the
hidden units of a network trained to classify sonar tar-
gets.
The question of how to extract rules from multi-
layer perceptrons has received more attention and is
still a very active field of research. (Kulluk et al.,
2013) propose a fuzzy rule extraction method for
neural networks, which they call Fuzzy DIFACONN.
(Hruschka and Ebecken, 2006) propose a clustering
based approach to MLP rule extraction that uses ge-
netic algorithm based clustering to identify clusters of
hidden unit activations which are then used to gener-
ate classification rules. (Saad and Wunsch II, 2007)
use an inversion method to generate rules in the form
of hyperplanes. Inverting an MLP (i.e. finding the
inputs that lead to a desired output) is done by gra-
dient descent and using an evolutionary algorithm.
5
Swingler K..
A Walsh Analysis of Multilayer Perceptron Function.
DOI: 10.5220/0004974800050014
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2014), pages 5-14
ISBN: 978-989-758-054-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Both (Augasta and Kathirvalavakumar, 2012) and (Ji-
vani et al., 2014) present recent comparative studies
of neural network rule extraction, distinguishing be-
tween methods that are decompositional, pedagogical
and eclectic. A decompositional approach extracts
rules from the weights and activations of the neural
network itself. The pedagogical approach, which is
taken in this paper, treats the neural network as a black
box and generates rules based on the outputs gener-
ated by the network in response to a set of input pat-
terns. Eclectic rule extraction combines both of the
aforementioned approaches.
More work has concentrated on choosing the right
number of hidden units for a specific data set. (Baum
and Haussler, 1989) bound the number of weights by
the target error size, (Uphadyaya and Eryurek, 1992)
bounded the number of hidden units by the number
of patterns to be learned, (Widrow and Lehr, 1990)
chose a bound based on the number of output units in
the network, and (Weigend et al., 1992) pointed out
that the amount of noise in the training data has an
impact on the number of units used. Some have taken
a dynamic approach to network structure discovery,
for example (Bartlett, 1994) used an information the-
oretic approach to add or remove hidden neurons dur-
ing training. The problem with this approach to train-
ing an MLP is that the existing weights are found in an
attempt to minimise error for that number of hidden
neurons. Adding a new one may mean the existing
weights are starting in a configuration that is unsuit-
able for a network with more neurons. Other search
methods have also been applied to finding the right
structure in an MLP. (Castillo et al., 2000) and (Yao,
1999) used genetic algorithms to search the space of
network structures, for example.
When using MLPs (and other machine learning
techniques), it is common practice to produce sev-
eral models to be used in an ensemble (Krogh and
Vedelsby, 1994). Due to the random start point of
the weight values, and the differences in architecture
across the networks in an ensemble, it is not easy to
know whether or not different networks are function-
ally different. It is possible to train a number of differ-
ent MLPs that all implement the same function (per-
haps with differing quality of fit across the weights)
with very different configurations of weight values.
For example, one could re-order the hidden units of
any trained network (along with their weights) and
produce many different looking networks, all with
identical functionality. One way to compare MLPs is
to compare their outputs, but a structural comparison
might also be desirable, and that is what we present
here.
Note the distinction between the structure of an
MLP, which is defined by the neurons and connect-
ing weights, and the structure of the function it im-
plements, which can be viewed in a number of other
ways. This paper views the underlying function im-
plemented by an MLP in terms of the contribution of
subsets of input variables. The number of variables
in a subset is called its order, and there are
n
k
sub-
sets of order k in a network of n inputs. The first or-
der subsets are the single input variables alone. The
second order subsets are each of the possible pairs of
variables, and so on. There is a single order n set,
which is the entire set of inputs. Any function can be
represented as a weighted sum of the values in each
of these subsets. The weights (known as coefficients
in the chosen analysis) are independent (unlike the
weights in an MLP, whose values are determined to an
extent by other weights in the network) and specific
to their variable subset. The first order coefficients
describe the effect of each variable in isolation, the
second order coefficients describe the contribution of
variable pairs, and so on. The method for decompos-
ing a neural network function into separate compo-
nents described in this paper is the Walsh transform.
Section 2 describes the Walsh transform in some
detail. This is followed by a description of the method
for producing Walsh coefficients from a neural net-
work in section 3. Section 4 introduces some func-
tions that will be used in experiments described in
following sections. Section 5 demonstrates how the
method can be used to track the complexity of MLPs
during training and section 6 demonstrates how a par-
tial transform on a small sample from a larger net-
work can provide useful insights. The Walsh method
is compared to other methods of understanding net-
work structure in section 7. Finally, sections 8 and 9
offer some conclusions and ideas for further work.
2 WALSH FUNCTIONS
Walsh functions (Walsh, 1923), (Beauchamp, 1984)
form a basis for real valued functions of binary vec-
tors. Any function f : {−1, 1}
n
→ R can be repre-
sented as a weighted linear sum of Walsh functions.
The Walsh functions take the form of a sequence of bit
strings over {−1,1}
2
n
where n is the number of vari-
ables in the function input. n is known as the Walsh
function order. There are 2
n
Walsh functions of order
n, each 2
n
bits long. Figure 1 shows a representation
of the order 3 Walsh functions. Each Walsh function
has an index from 1 to 2
n
, with the j
th
function be-
ing ψ
j
and bit number x of the j
th
Walsh function is
ψ
j
(x). As figure 1 shows, the Walsh functions can be
viewed as a matrix of values from {−1, 1} with rows
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
6

x = 0 1 2 3 4 5 6 7
ψ
0
ψ
1
ψ
2
ψ
3
ψ
4
ψ
5
ψ
6
ψ
7
Figure 1: A pictorial representation of an order 3 Walsh
matrix with black squares representing 1 and white squares
-1. A Walsh sum is calculated by summing the product of
the Walsh coefficient associated with each row by the values
in the column indexed by the function input.
representing each Walsh function and columns repre-
senting each bit.
A Walsh representation of a function f (x) is de-
fined by a vector of parameters, the Walsh coeffi-
cients, ω = ω
0
...ω
2
n
−1
. Each ω
j
is associated with
the Walsh function ψ
j
, that is a row in the Walsh
matrix. Each possible input, x is given an index, x,
which is calculated by replacing any -1 in x with 0
and converting the result to base 10. For example if
x = (1, −1, 1), then x = 5. Each column of the Walsh
matrix corresponds to a value of x.
The Walsh representation of f (x) is constructed
as a sum over all ω
j
. In the sum, each ω
j
is either
added to or subtracted from the total, depending on
the value of the bit corresponding to x (i.e. column x
in the Walsh matrix), which gives the function for the
Walsh sum:
f (x) =
2
n
∑
j=0
ω
j
ψ
j
(x) (1)
2.0.1 Constructing the Walsh Functions
The value of a single cell in the Walsh matrix, ψ
j
(x) is
calculated from the binary representation of the coor-
dinates ( j, x), of j and x, and returns +1 or -1 depend-
ing on the parity of the number of 1 bits in shared
positions. Using logical notation, a Walsh function is
derived from the result of an XOR (parity count) of
an AND (agreement of bits with a value of 1):
ψ
j
(x) = ⊕
n
i=1
(x
i
∧ j
i
) (2)
where ⊕ is a parity operator, which returns 1 if
the argument list contains an even number of 1s and
-1 otherwise.
2.0.2 Calculating the Coefficients - the Walsh
Transform
The Walsh transform of an n-bit function, f (x), pro-
duces 2
n
Walsh coefficients, ω
x
, indexed by the 2
n
combinations across f (x). Each Walsh coefficient, ω
x
is calculated by
ω
x
=
1
2
n
2
n
−1
∑
j=0
f ( j)ψ
j
(x) (3)
Each of the resulting Walsh coefficients has an
index, which defines the set of input variables over
which it operates. Converting the index to a binary
representation over n bits produces a representation
of the variables associated with the coefficient where
a 1 in position i indicates that x
i
contributes to the ef-
fect of that coefficient. For example, over 4 bits, the
coefficient ω
9
produces a binary word 1001, which
tells us that x
1
and x
4
contribute to the effect of ω
9
.
The order of a coefficient is defined as the number of
bits it contains that are set to 1. For example, ω
2
and
ω
8
are first order as they have one bit set to 1, and
ω
9
is second order. The magnitude of a coefficient
indicates its importance in contributing to the output
of the function on average across all possible input
patterns.
A function of n inputs produces 2
n
Walsh coef-
ficients, so it is not always possible to consider the
value of each coefficient individually. In this work we
look at individual coefficients and also define some
simple aggregate measures for summarising the re-
sults of a Walsh transform. They are the number of
non-zero coefficients, which is taken as a crude mea-
sure of overall complexity, and the average magnitude
of coefficients at each order, which produces a set
of values that measure the contribution to the mod-
els output made on average by interactions of each
possible order.
3 METHOD
In this context, the Walsh transform is not used to un-
derstand the training data, but to understand a neural
network that was trained on that data. The analysis
is in terms of the inputs to and the outputs from the
network, not its weights or activations, making this a
pedagogical approach. The black box of the neural
function is assessed in terms of its Walsh decomposi-
tion. Walsh functions map a vector of binary valued
inputs onto a real valued output, so any function with
this structure is amenable to the analysis. As shown
below, multiple output neurons and classification net-
AWalshAnalysisofMultilayerPerceptronFunction
7

works may also be analysed with this approach, so the
outputs can be nominal, discrete or continuous.
As neural networks can generalise and produce an
output for any given input pattern, we can generate an
exhaustive or randomly sampled data set from which
to perform the Walsh transform. A full Walsh decom-
position, as defined in equation 3 requires an exhaus-
tive sample of the input space. In all but the smallest
of networks, this is unfeasible in an acceptable time
period, so the coefficients must be calculated from
a sample. In either case, the sample used to calcu-
late the coefficients is generated from the whole input
space, not just the training data. The significant coef-
ficients (those that are significantly far from zero) can
be very informative about the underlying structure of
the function (in this case, the MLP). The procedure is
similar to that of pedagogical rule discovery in that it
treats the MLP as a black box and performs an analy-
sis on the output values that the network produces in
response to input patterns. The method proceeds as
follows:
1. Build a single MLP using your chosen method of
design and weight learning;
2. Generate input patterns (either exhaustively or at
random) and allow the MLP to generate its asso-
ciated output, thus producing (x, f (x)) pairs;
3. Use the resulting (x, f (x)) pairs to perform a
Walsh transform using equation 3;
4. Analyse the significant coefficient values, ω
x
.
The method can also be used for MLPs designed
for classification rather than regression. In such cases,
there is normally a single output neuron for each
class, with a target output value of one when the input
belongs to the neuron’s designated class and zero oth-
erwise. Properly trained, each neuron represents the
probability of a new pattern belonging to its desig-
nated class. Such a network is effectively a number of
related functions (one for each class) with a continu-
ous output between zero and one. Each output neuron
can be analysed in turn using the same procedure.
Step 4, the analysis of the ω
x
values can take
many forms. This paper discriminates between anal-
ysis during training (section 5) where the goal is to
gain an insight into the level of complexity a net-
work achieves as learning progresses, and post train-
ing analysis, designed to provide insights into the
function of the trained network. The example of such
an analysis in section 6.1 shows how the generalisa-
tion ability of a network may be investigated from the
results of the Walsh analysis. The goal of the analy-
sis is not to generate rules, so this is not another rule
extraction method, rather it is designed to give human
insights into the hidden life of the MLP.
4 EXPERIMENTS
A set of functions of increasing complexity
1
were
chosen to generate data to test this analysis. They are:
OneMax, which simply counts the number of val-
ues set to one across the inputs. This is a first order
function as each variable contributes to the output in-
dependently of any others. The OneMax function is
calculated as
f (x) =
n
∑
i=1
x
i
(4)
Vertical symmetry, which arranges the bits in
the input pattern in a square and measures symmetry
across the vertical centre line. This is a second order
function and is calculated as
f (x) =
n
∑
i=1
n
∑
j=1
δ
i j
s
i j
(5)
where δ
i j
is the Kronecker delta between x
i
and x
j
,
and s
i j
is 1 when i and j are in symmetrical positions
and 0 otherwise.
K-bit trap functions are defined by the number
of inputs with a value of zero. The output is highest
when all the inputs are set to one, but when at least
one input has a value of zero, the output is equal to
one less than the number of inputs with a value of 0.
A k-bit trap function over n inputs, where k is a factor
of n is defined by concatenating subsets of k inputs
n/k times. Let b ∈ x be one such subset and c
0
(b) be
the number of bits in b set to zero.
f (x) =
∑
b∈x
f (b) (6)
where
f (b) =
c
0
(b) − 1, if c
0
(b) > 0
k, if c
0
(b) = 0
(7)
The first case in equation 7, which applies to all
but 1 in 2
k
patterns, could be modelled with a first or-
der network (a linear perceptron, for example), which
is a local minimum in the error space. The ‘trap’ part
of the function is caused by the second case in equa-
tion 7, which requires the output to be high when all
of the inputs have a value of zero. This requires a
higher order function, including components at orders
from 1 to k, but only a small proportion of the data (1
in 2
k
of them) contains any clue to this.
1
Complexity has a specific meaning in this context. It
describes the number and order of the interactions between
inputs that produce a function’s output.
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
8

5 ANALYSIS DURING TRAINING
Experiments were conducted to investigate the struc-
ture of the function represented by an MLP as it
learns. The MLP used in these experiments had a
single hidden layer and one linear output neuron.
The functions described above were used to generate
training data, which was used to train a standard MLP
using the error back propagation algorithm. At the
end of each epoch (a single full pass through the train-
ing data), a Walsh transform was performed on the
predictions made by the network in its current state.
Summary statistics designed to reflect the com-
plexity of the function the network has implemented
and the level of contribution from each order of in-
teraction were calculated from the Walsh coefficients.
The complexity of the function was calculated as the
number of significant non-zero Walsh coefficients.
The size of the contribution from an order of inter-
action, o was calculated as the average of the abso-
lute value of the coefficients of order o. Experiment
1 trained networks on the simple OneMax function
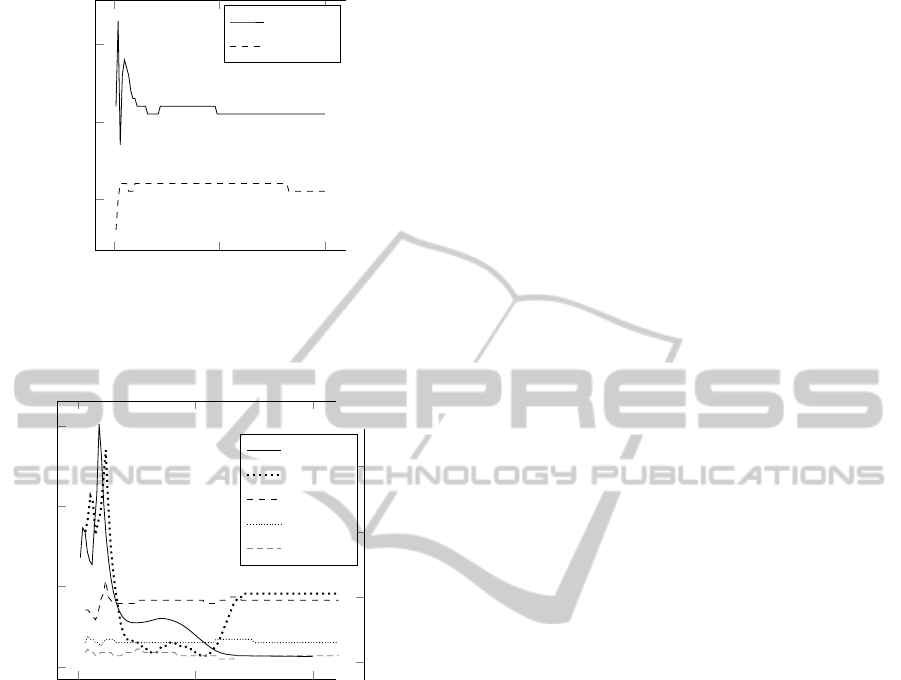
(equation 4). Figure 2 shows the training error and
network complexity of an MLP with one hidden unit
trained on the OneMax function. During learning, the
network initially becomes over complex and then, as
the error drops, the network complexity also drops to
the correct level.
In experiment 2, an MLP was trained on the sym-
metry function of equation 5, which contains only
second order features. Figure 3 shows the results of
analysing the Walsh coefficients of the network func-
tion during learning. Three lines are shown. The solid
line shows the network prediction error over time and
the broken lines show the contribution of the first
and second order coefficients in the Walsh analysis
0 1,000 2,000
0
0.2
0.4
Training Epoch
Training Error
Error
Complexity
100
200
Complexity
Figure 2: Comparing training error with network complex-
ity during learning of the OneMax function with an MLP
with one hidden unit. Note that complexity falls almost
1000 epochs after the training error has settled at its min-
imum.
0 200 400
0
0.2
0.4
0.6
Training Epoch
Training Error
0
2
4
6
·10
−2
Mean Walsh Coefficient
Error
Order 1
Order 2
Figure 3: Network error and contribution of first and second
order Walsh coefficients during training of an MLP on a
second order function. Note the fall in the error rate when
the second order coefficients overtake the first.
of the network function. Note the point in the error
plot where the error falls quickly corresponds to the
point in the Walsh analysis where the second order
coefficients grow past those of first order. Compare
this chart to that in figure 4, where the same prob-
lem is given to another MLP with the same structure,
but which becomes trapped at a local error minimum,
which is a first order dominated approximation to the
function. The plot suggests that the higher order com-
ponents cannot increase their contribution and that
this network is unlikely to improve.
Figure 5 shows the error of an MLP decrease as it
learns the 4 bit trap problem described by equation 6.
The contribution of the first, second, third and fourth
order Walsh coefficients are summed and plotted. The
final, correct configuration can be seen in the right
hand part of the plot, with the first order coefficients
having the strongest contribution, but with the second,
third and fourth also required to escape the ’trap’ of
the order below. The plot shows the first order coeffi-
cients growing first (as they did in figure 3), causing
the average error to rise due to the higher order trap
part of the function. The first order components are
suppressed by the high error they cause, but the error
doesn’t settle to its lowest point until the first order
coefficients recover the correct level of contribution.
6 PARTIAL WALSH ANALYSIS
For even moderately large numbers of inputs, calcu-
lating every Walsh coefficient can take an impracti-
cally long amount of time. In such cases, a partial
Walsh analysis may still be useful. A partial analy-
AWalshAnalysisofMultilayerPerceptronFunction
9
0
500
1,000
1
2
3
·10
−2
Training Epoch
Walsh Contribution
Order 1
Order 2
Figure 4: Contribution of first and second order Walsh coef-
ficients during training of an MLP on a second order func-
tion, stuck in a local minimum.
0
500
1,000
0
0.2
0.4
0.6
Training Epoch
Training Error
0
2
4
6
·10
−2
Walsh Order
Error
Order 1
Order 2
Order 3
Order 4
Figure 5: The contribution of first, second, third and fourth
order Walsh coefficients during training of an MLP on a the
4-bit trap function plotted with the average error per pass
through the data set (solid line).
sis calculates the values of only a small subset of the
Walsh coefficients. An obvious choice for the subset
of coefficients to calculate are those of the lower or-
ders. ω
0
is the average output of the function (in this
case, the MLP) across the sampled data. The first or-
der coefficients, ω
1
,ω
2
,ω
4
,... represent the average
contribution of each input in isolation. In general, or-
der k coefficients represent the additional contribution
of each subset of inputs of size k to the function out-
put. The number of coefficients of order k from a set
of inputs of size n is
n
k
.
It is also possible to estimate the Walsh coeffi-
cients from a sample of random input patterns and
their associated predicted outputs from the network,
rather than analysing every input pattern exhaustively.
As with the calculation of any statistic from a sam-
ple, the values gained are estimates, but they can still
provide useful insights into the functioning of a neu-
ral network. The number of samples required to esti-
mate coefficients accurately grows exponentially with
their order, so the low order coefficients can be esti-
mated with smaller samples than the higher order co-
efficients require. The next experiment described in
this paper makes use of partial samples from both the
coefficients and the input space.
6.1 Measuring Generalisation
The ability of an MLP to generalise to produce out-
puts for patterns that were not in its training data is
of great advantage. As the weights of the network
are difficult to analyse, the performance of the learned
function in areas of input space that are outside those
covered by the training data can be difficult to as-
sess. Test and validation sets perform this task to a
degree, but this paper proposes a new method based
on a Walsh analysis.
The Walsh coefficients of an MLP function are
generated by sampling (either exhaustively or at ran-
dom) from the whole input space, not just the part of
it covered by the training or test data. The coefficients
give a picture of the general shape of the function, not
just its behaviour on the training data. For ease of
visualisation, a character classification task was used
to test this type of analysis. Figure 6 shows the dig-
its from 0 to 9 as 25 pixel bitmaps. A standard MLP
with 25 binary inputs and 10 binary outputs was used
to learn the classification. Data was generated using
the images in figure 6 with evenly distributed random
noise (bit values flipped at random) added at vary-
ing levels. The resulting MLP implements ten differ-
ent functions that map the binary input patterns onto
single, continuous outputs. With a suitable training
regime the output values represent the probability of
an input pattern belonging to the class represented by
the output neuron. These functions are not indepen-
dent – they share the parameters from the inputs to
the hidden layer, but differ in their hidden to output
weights. Ten Walsh decompositions are performed –
one for each output neuron – and used to separate out
the ten functions that are combined across the MLP’s
weights.
An individual Walsh decomposition for each out-
put neuron was performed after training was complete
based on 50,000 random input samples and their as-
sociated network output. The first order coefficients
were plotted on a grid where the pixel locations from
the inputs correspond to the first order coefficients of
the Walsh decomposition.
Figure 7 shows the results for the network trained
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
10
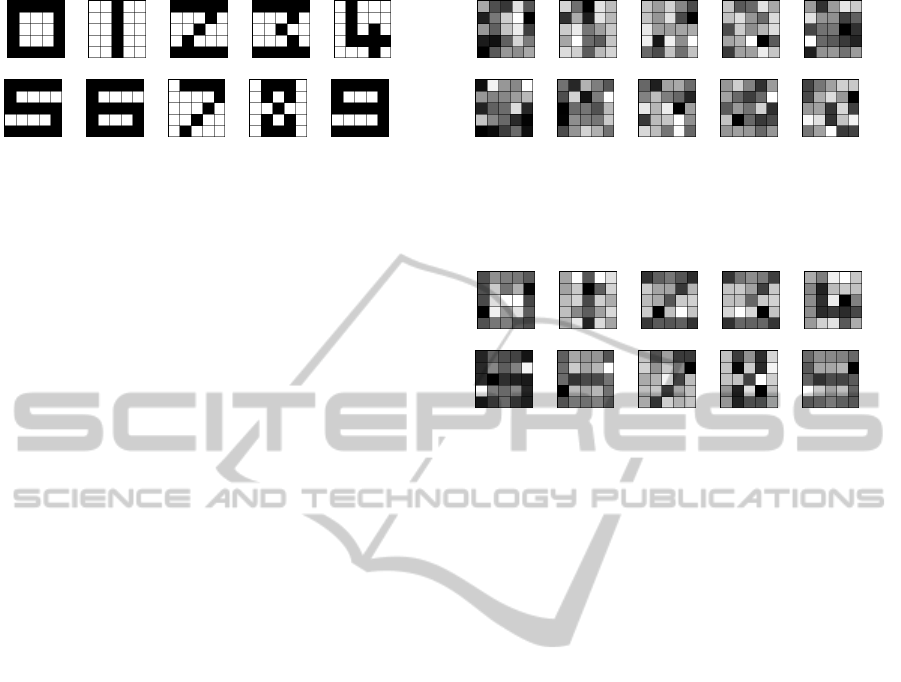
Figure 6: Noise free training data used to analyse a classifi-
cation network.
on noise free data. The network was able to separate
the training data perfectly, but the first order coeffi-
cients of its underlying function do not suggest that
a particularly general model has been learned. As
the MLP needs only to find a weight configuration
that minimises error, it will do so using a minimal set
of features if possible. These features are difficult to
identify by an analysis of the network weights, but
the Walsh analysis reveals more. From figure 7 it is
clear that a small number of pixels have been identi-
fied as key discriminators. These are the black squares
in each image. For example, it is enough to know that
there is a black pixel in the second row of the cen-
tre column to classify the image as a 1 (no other digit
contains a black pixel there) and the coefficients for
the output neuron of class ’1’ reflect that. Such a net-
work is unlikely to generalise well as noise in the key
inputs would lead to a misclassification.
Contrast this with the first order coefficients
shown in figure 8, which were calculated from a net-
work trained with 30% added noise. The patterns cap-
tured by the first order components of the network
function mapped to each output are clearly more gen-
erally matched to the patterns they have been trained
to identify. Figure 8 clearly shows that more of the
inputs have a role in the classification function, sug-
gesting a more robust model. Note the white squares
in the images for patterns 5,6 and 9. They show the
locations of key negative evidence for those classes.
A value of one in these inputs is strong evidence
against the pattern belonging to that class. These pix-
els are at the key points of difference between the pat-
terns. A recent paper, (Szegedy et al., 2013) has found
that deep neural networks have what the authors call
“blind spots”, which manifest themselves as images
that are clearly in one class, but are erroneously clas-
sified by the network. Such examples are discovered
using a method that starts with a correctly classified
image and searches for the closest image that causes
a mis-classification, known as an adversarial image. It
is clear from figure 8 that the Walsh analysis can high-
light the key pixels which, if changed, will produce
an adversarial image. This work suggests (but leaves
for future investigation) that the blind spots could be
reduced or removed by the introduction of noise dur-
Figure 7: First order Walsh coefficients from a network
trained on the data in figure 6 with no added noise. Grey
squares indicate no contribution to classification from a first
order component. Greater depth of black or white indicates
stronger contribution (positive or negative).
Figure 8: First order Walsh coefficients from a network
trained on the data in figure 6 with 30 percent added noise.
The noise ensures that no individual input can be relied
upon to produce a correct classification, and so produces
a model that covers more of the input space, and so is better
at generalisation.
ing training, which removes the reliance on key inputs
and lessens the risk of the existence of adversarial im-
ages.
The second order coefficients dictate the effect on
the function output of whether or not the values in
pairs of inputs agree or disagree. For example, ω
5
describes the effect of inputs 0 and 2 on the output.
A positive ω
5
causes the value of ω
5
to be added to
the function output when inputs 0 and 2 agree and
to be subtracted when they disagree. Conversely, a
negative value of ω
5
causes the function output to in-
crease when the values across inputs 0 and 2 differ.
The second order coefficients for the digit classifica-
tion network were analysed as follows. Firstly, all 300
of the second order coefficients were estimated using
a sample of 50,000 random (input,prediction) pairs.
Each second order coefficient relates to a pair of in-
puts with a connection strength. The inputs with the
largest absolute summed connection strengths were
identified as key pixels and the strength of their con-
nections with each of the other 24 inputs were plotted.
Figure 9 shows an example for the output neuron
associated with the digit 0. The centre pixel is the key
pixel, the dark pixels are those that disagree with cen-
tre pixel when a 0 is classified, and the light pixels are
those that agree with it. Note that the strongest tie of
agreement is between the pixels that separately would
reclassify the input as a 9 (where disagreement be-
tween these pixels is a defining feature) or a 5 (where
those pixels both disagree with the centre pixel) if
AWalshAnalysisofMultilayerPerceptronFunction
11
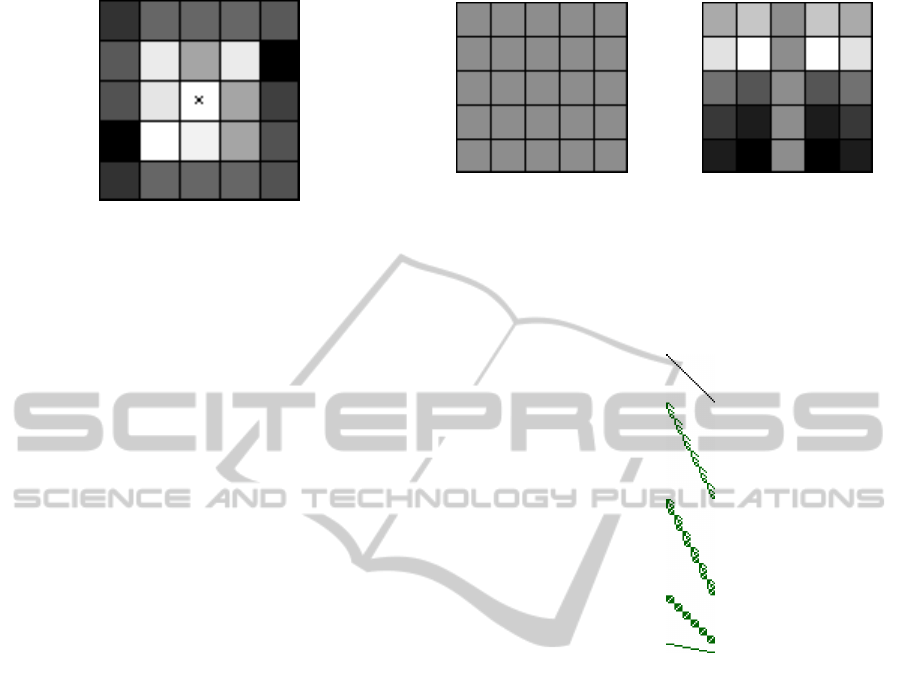
Figure 9: Second order coefficients between the centre pixel
and all others. White indicates agreement, black indicates
difference.
their values were flipped from one to zero.
The example above was simple in the sense that
the first order coefficients were sufficient to give a
good insight into the function that the MLP had im-
plemented. In the following experiment, a second or-
der function is investigated. The function is a measure
of pattern symmetry, as defined in equation 5. Figure
10(a) shows the first order coefficients of a network
trained to measure the symmetry of an image. Unsur-
prisingly, it shows no first order coefficients of impor-
tance. Mid grey indicates values close to zero, which
suggests either that the variable that corresponds to
the coefficient is unimportant or that variables are in-
volved at higher orders. The higher order coefficient
values tell us which of these possibilities is true.
Figure 10(b) shows the second order coefficients
of a Walsh transform of the symmetry predicting
MLP. The plot is produced by finding pairs of inputs
that share a non-zero second order coefficient and set-
ting them both to the same, unique shade of gray.
Note that the centre column inputs share no second
order relationships and are shaded mid-gray. The oth-
ers are shaded so that their gray level matches that of
the inputs with which they share a non-zero second
order coefficient. The depth of shade does not indi-
cate the size of the parameter, just that a connection
exists. The shading is to discriminate between input
pairs.
It is clear from figure 10(b) that each input is im-
portant to the calculation of the function output, so
the interpretation of the zero valued first order coeffi-
cients is that the inputs’ contributions are important,
but only at orders above one.
7 COMPARISON WITH OTHER
METHODS
Recent published work in this field, such as the papers
mentioned in the introduction, has concentrated on
rule discovery, though what constitutes a rule is quite
(a) First order (b) Second order
Figure 10: First and second order coefficients of a symme-
try counting function. In (a), the coefficients are all zero.
In (b), the shade of gray indicates a non zero second order
coefficient across the two pixels with shared gray level.
Order Weights
1
2
3
4
5
Figure 11: 5 Bit Trap Walsh Coefficients.
flexible. (Jian-guo et al., 2008), for example build
a binary truth table to represent the function of the
MLP. The Walsh method is a pedagogical approach,
according to the definitions in (Jivani et al., 2014) as it
treats the MLP as a black box. One of the advantages
of the pedagogical approach is that the rules that are
produced are easy to interpret.
The Walsh decomposition approach certainly aids
interpretability, but it cannot be considered a rule ex-
traction algorithm as it does not generate rules. In-
stead, it provides insight into the complexity of an
MLP, highlighting both the level of complexity, and
the variables involved. For example, in the k-bit trap
function, it is clear from an examination of the coef-
ficients that inputs are organised into subsets which
interact within the traps, but that they are independent
across traps.
One advantage of the Walsh method is that the
coefficients may be easily visualised. Figure 11
shows the coefficients generated from an MLP that
has learned a 5-bit trap function over 30 inputs. The
figure is generated by discarding non-significant co-
efficients and then sorting the remaining coefficients
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
12

into combinatorial sequence so that low order coeffi-
cients are at the top of the figure. Each row of the fig-
ure represents a single coefficient as the binary equiv-
alent of its index. For example ω
5
is a second order
coefficient with binary representation 101, meaning
that the coefficient measures the interaction between
inputs 1 and 3. Dark pixels represent connected inputs
in the figure.
Another advantage of the pedagogical rule extrac-
tion approach is that it is portable across network ar-
chitectures as it treats the network as a black box. The
Walsh method shares this advantage. A common fea-
ture of rule extraction methods is that they accept a
reduction in accuracy in return for a simpler set of
rules. The rule set can be evaluated on the same test
data as the MLP that generated the rules and the trade-
off between accuracy and size of the rule set needs to
be managed. To reproduce the functionality of the
network perfectly with a rule set can require a great
many rules and a large number of exceptions (or rules
that apply to a very small area of input space). The
Walsh method shares this limitation, but for different
reasons. As the Walsh functions are a basis set, there
is no function that they cannot represent, so there is
no network whose behaviour cannot be perfectly re-
produced. Any network with binary inputs can have
its behaviour perfectly reproduced by a Walsh decom-
position, but only by a full decomposition from an
exhaustive sample of input,output pairs. This is pos-
sible for small networks, but infeasible for networks
with large numbers of inputs. A sample of coefficients
must then be calculated from a sample of data points,
which will lead to an approximate representation of
the MLP function.
Classification rules are generally local in that they
partition a data set into subspaces that share the same
output. This works well when the inputs are numeric
as the conditional part of the rule can specify a range.
When the inputs are discrete, as in the binary case
studied here, the rules cannot partition the input space
across a range. In such cases, a rule set may not be the
best way to understand a function. Take the charac-
ter recognition task for example, we can learn more
by visualising the coefficients (even just those of low
order) as shown in figure 8 than by studying a long
list of rules. Walsh coefficients are global as they de-
scribe the contribution of an input or group of inputs
across the entire input space. This means that it is
not possible to partition the input space and so derive
simple rules. Every coefficient plays a part in calcu-
lating the output from every input pattern. General
statements can still be made, however, but they are of
the form “When variable x = 1, the output increases”
or “When variables a and b are equal, the output de-
creases”. These statements can be generated directly
from the coefficients.
8 CONCLUSIONS
An MLP trained on binary input data with either nu-
meric or categorical output neurons can be analysed
using Walsh functions. Such an analysis can reveal
the relative complexity of different networks, give an
insight into the way the function represented by an
MLP evolves during learning and shed light on which
areas of input space a network has utilised in learning
that function. This understanding can help in under-
standing how well a network will generalise to new
data and where its likely points of failure may be. An
exhaustive Walsh decomposition is only possible for
small networks, but a partial decomposition based on
a random sample from the network’s input space can
still be used to gain valuable insights into the specific
function learned by an MLP.
9 FURTHER WORK
This work has used Walsh functions as its method
of complexity analysis, but other basis functions–
particularly those suitable for real valued inputs–are
also worthy of investigation. As the analysis is not
designed to reconstruct the function, merely to shed
light on its structure in a human readable form, it
should be possible to use an information theoretic
measure of interaction such as mutual entropy.
The method provides a useful measure of network
complexity that is not based on the number of weights
in the network. Training methods that favour simple
models over more complex ones often use parameter
counts (in the case of MLP, the weights) as a mea-
sure of complexity. For example, minimum descrip-
tion length (MDL) methods are often based on param-
eter counts, but might usefully be adapted to account
for other types of complexity such as that described
here. The Walsh analysis reveals that two networks of
equal size do not necessarily share an equal complex-
ity. The relationship between network complexity and
network size is an interesting field of study in its own
right. Of course, this analysis is not restricted to use
with MLPs. Any regression function may be used, but
it is well applied to MLPs as they are difficult to anal-
yse in terms of the structure of their weights alone.
The number of Walsh coefficients to consider
grows exponentially with the number of inputs to the
network, so it is not possible to exhaustively calculate
every possible one in a large network. For networks
AWalshAnalysisofMultilayerPerceptronFunction
13

that contain key interactions at a number of different
higher orders, the task of finding the significant coef-
ficients becomes a great problem. Work on heuristics
for finding the significant high order coefficients in
a sparse coefficient space is ongoing. One approach
is to build a probabilistic model of the importance of
different neurons and connection orders and sample
coefficients from that model. As more coefficients are
found, the quality of the model improves and allows
the faster discovery of others.
REFERENCES
Augasta, M. and Kathirvalavakumar, T. (2012). Rule ex-
traction from neural networks - a comparative study.
pages 404–408. cited By (since 1996)0.
Bartlett, E. B. (1994). Dynamic node architecture learning:
An information theoretic approach. Neural Networks,
7(1):129–140.
Baum, E. B. and Haussler, D. (1989). What size net gives
valid generalization? Neural Comput., 1(1):151–160.
Beauchamp, K. (1984). Applications of Walsh and Related
Functions. Academic Press, London.
Castillo, P. A., Carpio, J., Merelo, J., Prieto, A., Rivas, V.,
and Romero, G. (2000). Evolving multilayer percep-
trons.
Elman, J. L. (1990). Finding structure in time. Cognitive
Science, 14(2):179–211.
Gorman, R. P. and Sejnowski, T. J. (1988). Analysis of
hidden units in a layered network trained to classify
sonar targets. Neural Networks, 1(1):75–89.
Hruschka, E. R. and Ebecken, N. F. (2006). Extract-
ing rules from multilayer perceptrons in classification
problems: A clustering-based approach. Neurocom-
puting, 70(13):384 – 397. Neural Networks Selected
Papers from the 7th Brazilian Symposium on Neural
Networks (SBRN ’04) 7th Brazilian Symposium on
Neural Networks.
Jian-guo, W., Jian-hong, Y., Wen-xing, Z., and Jin-wu, X.
(2008). Rule extraction from artificial neural network
with optimized activation functions. In Intelligent Sys-
tem and Knowledge Engineering, 2008. ISKE 2008.
3rd International Conference on, volume 1, pages
873–879. IEEE.
Jivani, K., Ambasana, J., and Kanani, S. (2014). A sur-
vey on rule extraction approaches based techniques
for data classification using neural network. Interna-
tional Journal of Futuristic Trends in Engineering and
Technology, 1(1).
Kamimura, R. (1993). Principal hidden unit analysis with
minimum entropy method. In Gielen, S. and Kappen,
B., editors, ICANN 1993, pages 760–763. Springer
London.
Krogh, A. and Vedelsby, J. (1994). Neural network ensem-
bles, cross validation, and active learning. In NIPS,
pages 231–238.
Kulluk, S.,
¨
Ozbakir, L., and Baykaso
˘
glu, A. (2013). Fuzzy
difaconn-miner: A novel approach for fuzzy rule ex-
traction from neural networks. Expert Systems with
Applications, 40(3):938 – 946. FUZZYSS11: 2nd In-
ternational Fuzzy Systems Symposium 17-18 Novem-
ber 2011, Ankara, Turkey.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Parallel distributed processing: Explorations in the
microstructure of cognition, vol. 1. chapter Learning
Internal Representations by Error Propagation, pages
318–362. MIT Press, Cambridge, MA, USA.
Saad, E. and Wunsch II, D. (2007). Neural network explana-
tion using inversion. Neural Networks, 20(1):78–93.
cited By (since 1996)22.
Sanger, D. (1989). Contribution analysis: A technique for
assigning responsibilities to hidden units in connec-
tionist networks. Connection Science, 1(2):115–138.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I. J., and Fergus, R. (2013). Intriguing
properties of neural networks. CoRR, abs/1312.6199.
Uphadyaya, B. and Eryurek, E. (1992). Application of neu-
ral networks for sensor validation and plant monitor-
ing. Neural Technology, (97):170–176.
Walsh, J. (1923). A closed set of normal orthogonal func-
tions. Amer. J. Math, 45:5–24.
Weigend, A. S., Huberman, B. A., and Rumelhart, D. E.
(1992). Predicting Sunspots and Exchange Rates with
Connectionist Networks. In Casdagli, M. and Eubank,
S., editors, Nonlinear modeling and forecasting, pages
395–432. Addison-Wesley.
Widrow, B. and Lehr, M. (1990). 30 years of adaptive neu-
ral networks: perceptron, madaline, and backpropaga-
tion. Proceedings of the IEEE, 78(9):1415–1442.
Yao, X. (1999). Evolving artificial neural networks. In Pro-
ceedings of the IEEE, volume 87, pages 1423–1447.
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
14
