
Basic Concept of Cuckoo Search Algorithm for 2D Images
Processing with Some Research Results
An Idea to Apply Cuckoo Search Algorithm in 2D Images Key-points Search
Marcin Wo´zniak and Dawid Połap
Institute of Mathematics, Silesian University of Technology, Kaszubska 23, 44-100 Gliwice, Gliwice, Poland
Keywords:
Key-points Search, 2D Image Processing, Cuckoo Search Algorithm, Evolutionary Computation.
Abstract:
In this paper, the idea of applying cuckoo search algorithm to search for key-points in 2D images is formulated.
For a set of test images we present and verify simplified version, it’s efficiency and precision. Research results
are presented and discussed in comparison to classic methods like simplified SURF and SIFT algorithms to
show potential efficiency of applied computational intelligence.
1 INTRODUCTION
Evolutionary computation (EC) methods find their
application in various modern sciences, IT projects,
economy and industry. Computational intelligence
(CI) has many mechanisms that can be used effi-
ciently to calculate even sophisticated mathematical
models. They are efficient, easy to implement and
precise. Let us mention only some of them.
Application of EC methods to dynamic systems
positioning is discussed in (Nowak and Wo´zniak,
2008). In (Gabryel et al., 2012) CI was applied to
create learning sets for artificial intelligence (AI) con-
trol systems. CI positioning of queueing systems ap-
plied in computing network models is presented in
(Gabryel et al., 2013) and (Wo´zniak et al., 2014b)
or (Wo´zniak et al., 2014a). Finally one may present
EC efficiency in 2D image preprocessing (please see
(Wo´zniak and Marszałek, 2014)). In this paper we
would like to present simplified Cuckoo Search Al-
gorithm (CSA) for 2D image processing. Cuckoo
Search Algorithm is one of very promising EC meth-
ods. Even though it was formulated a few years
ago there have been many successful applications of
it’s dedicated versions. CSA helps to optimize se-
mantic web composition, see (Chifu et al., 2012).
In (Wang et al., 2012) is presented it’s efficiency in
Markov models analysis. While training spiking neu-
ral models is discussed in (Vazquez, 2011). Some
aspects of CSA design optimization are presented in
(Yang and Deb, 2013). Allocation in distribution net-
work by the use of CSA is presented in (Moravej
and Akhlaghi, 2013). One may also find CSA used
in solving scheduling problem (see (Chandrasekaran
and Simon, 2012)). CSA is efficient in stochastic
and reliability optimization, see (Valian et al., 2013).
In (Bhargava et al., 2013) is discussed CSA appli-
cation in phase equilibrium calculations. While in
(Bulatovi´c et al., 2013) optimum synthesis of six-bar
double dwell linkage. Finally in (Wo´zniak, 2013) is
discussed application of CSA to positioning queue-
ing systems. Summing up, EC methods are applied,
where CI may help to improve data processing. There
are many different fields of efficient applications of
EC, as presented above. All this convinced us to im-
plement one of them in 2D image processing.
In the following sections we try to present and
discuss potential application of EC method, in par-
ticular Cuckoo Search Algorithm, in the process of
2D image processing. Research results show poten-
tial efficiency and high precision of CSA in search for
key-points in 2D images. For the research were taken
sample images from open test images databases
12
.
When compared to other conventional methods of
key-points search, applied CSA method can effi-
ciently search for key-areas in various pictures. The
method discussed in section 2.3 is less complicated.
Therefore performed calculations have lower compu-
tational complexity. This makes presented solution
efficient, faster and easier to implement in compari-
son to classic methods.
1
www.imageprocessingplace.com
2
www.ece.utk.edu/gonzalez/ipweb2e/downloads/
157
WoÅžniak M. and Połap D..
Basic Concept of Cuckoo Search Algorithm for 2D Images Processing with Some Research Results - An Idea to Apply Cuckoo Search Algorithm in 2D
Images Key-points Search.
DOI: 10.5220/0005015801570164
In Proceedings of the 11th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2014), pages 157-164
ISBN: 978-989-758-046-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 KEY-POINTS SEARCH
When we look at image, specific way of recognition
is processed in our brain. From points in the picture,
our eyes select areas where points of special proper-
ties compose objects. These areas are processed in
our brain to recognize what they present. However to
classify objects properly, the eyes choose some spe-
cial points that help to verify each object. Similar
process of recognition can be implemented in com-
putational mechanism. Digital images are composed
of points. Each of these pixels have measurable posi-
tion X = (x, y) = (x
i
,x
j
) and some special properties.
We can name saturation, sharpness, brightness and
many more. All these features compose areas in im-
age that can be classified by computer algorithms (see
(Wo´zniak et al., 2014c) and (Wo´zniak and Marszałek,
2014)). However correct classification depends on
right recognition from key-points. Therefore one may
say, that position of each pixel and it’s properties are
crucial aspects. These pixels compose objects, which
can be classified. Therefore essential part in classifi-
cation process is key-points search. CI brings many
interesting methods that may help.
2.1 Classic Attempt–SURF
One of classic methods used for key-points recog-
nition is SURF (Speeded-Up Robust Features) algo-
rithm. This method is description of the image by
selecting characteristic key-points (for more details
see (Abeles, 2013), (Bay et al., 2008) or (Mehrotra
et al., 2009)). It combines selection of key-points
with calculating 64 element descriptor. In SURF is
applied integrated image and filter approximation of
block Hessian determinant (see (Decker and Paulus,
2011) or (Gossow et al., 2011)). In our SURF we ap-
proximated these points with block filter of Hessian
determinant, which for point X in image I is calcu-
lated for Hessian matrix H(X,σ) in X at scale σ as
H(X,σ) =
L
xx
(X,σ) L
xy
(X,σ)
L
xy
(X,σ) L
yy
(X,σ)
, (1)
where L
xx
(X,σ) is convolution of Gaussian second or-
der derivatives D
xx
, D
yy
or D
xy
. To detect interesting
points is used particular Hessian matrix approxima-
tion. We define it using formula
det(H
ap
) = D
xx
D
yy
−
|L
xy
(σ)|
F
|D
xx
(σ)|
F
|L
xx
(σ)|
F
|D
xy
(σ)|
F
D
xy
2
.
(2)
Then, image is blurred to get DoG (Difference of
Gaussian) images, what helps to find edges (for de-
tails please see (Brown and Lowe, 2002)). To localize
interesting points is used non maximum suppression
in 3 × 3 × 3 neighborhood. Maximum determinant
of Hessian matrix is interpolated at scale σ to differ
between first level and each octave. We fix repro-
ducible orientation based on information from circu-
lar region around pixel. Then, is constructed square
region aligned to selected orientation and SURF de-
scriptor is extracted. Please see (Abeles, 2013) and
(Bay et al., 2008) for more details.
Algorithm 1: Simplified SURF for RGB (Red-Green-
Blue) color values applied to search for key-points in 2D
images.
1: Calculate number of pixels and rows in image,
2: while j < rows do
3: while i < pixels do
4: rowsum
j
= (R
ij
)
2
+ (G
ij
)
2
+ (B
ij
)
2
,
5: end while
6: end while
7: Integral image is sum of rowsum,
8: Calculate approximated Hessian value using (2),
9: Build response layers for the image,
10: while i < pixels do
11: Calculate descriptor vector for each point,
12: Determine orientation,
13: end while
14: Construct descriptor vector for each image point.
2.2 Classic Attempt–SIFT
SIFT (Scale-Invariant Feature Transform) transforms
image into scale-invariant coordinates relative to lo-
cal aspects. This generates features that may densely
cover image for full range of scales and locations,
please see (Pope and Lowe, 1998) and (Se et al.,
2002). SIFT idea is based on (Zhang et al., 1995),
where possibility of matching Harris corners over
large image by using correlation window around each
corner was discussed (see also (Azad et al., 2009) and
(Sun et al., 2013) for details). This idea was devel-
oped in (Schmid and Mohr, 1997) to general image
recognition, where Harris corners were applied to se-
lect key-points by rotationally invariant descriptor of
local image regions. However Harris corner detec-
tor can be sensitive to changes in image scale, what
makes it inefficient in processing images of different
sizes. Therefore (Nelson and Selinger, 1998), (Pope
and Lowe, 1998) and (Shokoufandeh et al., 1999) ex-
tended local feature approach to achieve scale invari-
ance. Then some special features like multidimen-
sional histograms summarizing distribution of mea-
surements useful for recognition of textured objects
with deformable shapes were discussed in (Schiele
and Crowley, 2000). Final version of this scale de-
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
158

scriptor, less sensitive to local image distortions, was
given in (Lowe, 2004).
In our SIFT, features are first extracted from set of
images and stored in memory. Key-point is matched
by individually compared examined feature to these
previously stored using Euclidean distance of feature
vectors. Correct key-points are filtered from set of
matches by identifying subsets of interest points that
agree on object, it’s location, scale and orientation.
To determine these clusters we perform hash table im-
plementation of generalized Hough transform. Each
cluster of features is then subject to further verifica-
tion. SIFT uses special detector to find scale-space
extrema where continuous function is Gaussian. Ac-
cording to (Lowe, 2004) we have used L(X,γ
D
) as
scale space of image defined in
L(X,γ
D
) = G(X,γ
D
) ∗ I(X), (3)
where L(X, γ
D
) is produced from convolution of
variable-scale Gaussian G(X,γ
D
) with input image
point. To scale selection is used approximated DoG
filter. Then key-point is localized by taking Taylor
series expansion of scale-space function
D(
~
X) = D+ D
T
x
~
X + 0.5
~
X
T
D
T
xx
~
X, (4)
where D(
~
X) and it’s derivatives are evaluated at image
points and T is offset from these points (for details see
(Brown and Lowe, 2002)). Finally after filtering, de-
scriptor operations are performed. Descriptor is local
statistic of orientations of the gradient of the Gaussian
scale space.
Algorithm 2: Simplified SIFT applied to search for key-
points in 2D images.
1: Calculate maximum number of Level,
2: Build DoG pyramid,
3: Find maximum and minimum of Level,
4: Compare vector of pixel with it’s rescaled neigh-
bors,
5: for Each Level of DoG pyramid do
6: Match to sub pixel maximum location,
7: Eliminate edge points,
8: end for
9: Construct keys using interpolated value.
2.3 Basic Concept of Cuckoo Search
Algorithm
Cuckoo Search Algorithm is very efficient gradient
free optimization technique, where some Gauss distri-
bution versions are applied to optimization (for more
details please see (Walton et al., 2011) and (Wo´zniak,
2013) respectively). In the research we have applied
CSA to search for key-points. This decision is based
on research results in other fields (see section 1) what
suggest potential efficiency in 2D image processing.
CSA is mapping behavior of birds that everyone
has heard of, cuckoos. These birds, accept for famous
sounds, have special nature of breeding. It is very
interesting how they do it. A cuckoo is flying and
looking for nest to lay an egg. They try to choose host
in peculiar way. Cuckoos are choosing nest, where are
already eggs. Moreover these eggs must look familiar
to cuckoos. They lay an egg and fly off. When hosts
come home they either get rid of intruder egg or just
simply accept new situation. This process is modeled
and applied as EC algorithm, where we assume:
1. Cuckoo, egg or host nest is similar for CSA algo-
rithm (it will be explained in this section).
2. Points in 2D image (all pixels) are potential host
nests, that are of interest to flying cuckoos.
3. Each cuckoo has only one egg to lay.
4. Total amount of flying cuckoos is constant.
5. Best nests containing egg (pixels of highest qual-
ity) will be transferred to next generation.
6. Rest of cuckoo population will be taken at random
within all given 2D image pixels.
7. Hosts may find that intruder egg is hosted with
1− p
α
∈ h0, 1i probability and get rid of it. In this
case a new cuckoo is placed randomly in image.
In dedicated CSA cuckoo, egg or host nest is similar.
All these are the same, because the algorithm is plac-
ing points in 2D image. First we call these pixels (po-
tential key-points) flying cuckoos. Then these cuck-
oos are lying eggs, therefore wa call these points eggs.
Then we simulate decision taken by hosts to drop the
egg or not. That is why we can use these tree names
simultaneously. Moreover, for simplified numerical
calculations, we assume that number of placed points
is constant. We check fitness function for each of
them. The best points are transferred to next round.
The rest of population is taken at random to maintain
constant level of cuckoos. Since these all operations
are completed we start next round in the CSA algo-
rithm. New generation of cuckoos is placed in the
image and we start procedure from the beginning.
Presented method seems to be complicated, how-
ever it is not. In every generation we only model the
choice of place to lay an egg with particular equations.
This movement has some statistic background. It uses
a concept of random walks, what helps to performnon
local search in different type solution spaces. Virtual
cuckoo movement is modeled with formula
X
t+1
= X
t
+ µ· L(β, γ,δ), (5)
BasicConceptofCuckooSearchAlgorithmfor2DImagesProcessingwithSomeResearchResults-AnIdeatoApply
CuckooSearchAlgorithmin2DImagesKey-pointsSearch
159

where the symbols are: X
t+1
= (x
t+1
i
,x
t+1
j
) – next
solution in CSA (potential key-point), µ – length of
step in random walk based on normal distribution
N
γ
cuckoos
;0,1
, L(β,γ,δ) – L´evy flight for a given step
length β, δ – length of minimum step for random walk
and γ – scaling parameter for L´evy flight.
L´evy flight is also called random walk, in which
length of particular step has value determined with
special probability distribution (please see (Yang and
Deb, 2009) or (Yang and Deb, 2013) respectively).
L´evy flights are made isotropic in random directions,
according to formula
L(β, γ,δ) =
q
γ
2π
exp[−
γ
2(β−δ)
]
(β−δ)
3
2
, 0 < β < δ < ∞
0, other
.
(6)
For more details on L´evy flights and non local
optimization theory please see (Pavlyukevich, 2007).
These simple equations map flying cuckoos while
searching for best nest. Finally, for each 2D image
point we only have to decide if it is ”found” by hosts.
This decision is modeled with equation
H(X
t+1
) =
1− p
α
drop the egg
p
α
the egg stays
, (7)
where the symbols are: H(X
t+1
) – decision taken by
hosts about intruder egg X
t+1
, p
α
∈ h0, 1i – chance of
each cuckoo egg to stay.
Algorithm 3: Basic CSA applied to search for key-points
in 2D images.
1: Define all coefficients: p
α
∈ h0,1i, β, γ, δ,
bestratio, number of cuckoos and number of
generations,
2: Dedicated criterion function: brightness of pixels
according to (8),
3: Create at random initial population in the image,
4: t:=0,
5: while t ≤ generations do
6: Move cuckoos according to (5) and (6),
7: Hosts decide if the eggs stay or no – decision
according to (7),
8: Sort points (cuckoos) according to the value of
criterion function,
9: Evaluate population and take bestratio of them
to next generation,
10: Rest of cuckoos take at random,
11: Next generation t + +,
12: end while
13: Best cuckoos from the last generation are poten-
tial key-points in 2D image.
2.4 An Idea to Apply CSA to 2D Images
Key-points Search
In the research we try to find simple and efficient
method for 2D image processing. Algorithm pre-
sented in section 2.3 was applied to search for 2D
images key-points. Each cuckoo is representing sin-
gle pixel (point in 2D image). We put population of
cuckoos to move from point to point and search for
specific areas. Searching operation is based on fit-
ness function. In the research we have used simpli-
fied fitness function. This function reflects brightness
of each image point X as
Brightness(X) = b, (8)
where symbol b denotes brightness of evaluated pixel.
This measure reflects value in scale from 0.0 to 1.0,
where the colors change from black to white. When
cuckoos fly in each iteration (round), they pick points
with best fitness within the range of their flight. Then
from all cuckoos we take bestratio of them, where
fitness function is highest or lowest depending on ex-
periment. These points (cuckoos) are taken to next
round and the rest of population is taken at random
from all image points. This is made to have constant
number of cuckoos, as defined in the algorithm. Tak-
ing at random some points in each iteration help to
search entire image for points of interest. Finally, the
last generation of cuckoos cover areas of our interest,
dark or bright depending on the experiment (see algo-
rithm 3). In the research, simulations were performed
for 120 cuckoos in only 40 generations with set co-
efficients: β = 0.5, γ = 0.3, µ = 0.25, δ = 0.2 and
bestratio = 30%. As we can see in the following sec-
tions, even so little cuckoos could find dark or bright
objects correctly.
3 RESEARCH RESULTS
As objects for examinations were taken standard test
images (see section 1). We have performed experi-
ments on different types of pictures: sharp, blurred,
landscapes or human postures and faces. In the re-
search we were looking for objects of similar type,
here we have concentrated on brightness and satura-
tion of pixels defined in standard way using (8). Each
of resulting key-points (pixels) is marked in red. We
have provided close-up areas showing enlarged por-
tion of each image.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
160

Figure 1: Dark key-points search in sharp and human posture images: from the left SURF result, SIFT result and CSA result.
Figure 2: Dark key-points search in sharp and human face images: from the left SURF result, SIFT result and CSA result.
Figure 3: Dark key-points search in landscape images: from the left SURF result, SIFT result and CSA result.
3.1 Dark Areas in Images
Let us first present research results for dark objects lo-
calization, see figures 1 – 3. Similar dark objects are
present in many different images. They can represent
elements of landscape (trees, blocks, different con-
structions, etc.), natural phenomena (tornadoes, shad-
ows, etc.), human figures or human appearance (face
features, hair, eyes, etc.). We can see that dedicated
CSA can easily find dark objects of different shapes.
In figure 3 are presented research results of searching
for buildings like bridges or natural phenomena like
shade under constructions. In figure 1 we can see that
CSA localized dark areas like man posture correctly.
It also localized some parts of machinery (camera tri-
pod). CSA is also efficient in localizing dark elements
of human appearance (see figure 2). All these areas
were found by dedicated CSA even using very small
number of individuals and iterations. In comparison
to SIFT, CSA results are slightly better. In compari-
BasicConceptofCuckooSearchAlgorithmfor2DImagesProcessingwithSomeResearchResults-AnIdeatoApply
CuckooSearchAlgorithmin2DImagesKey-pointsSearch
161
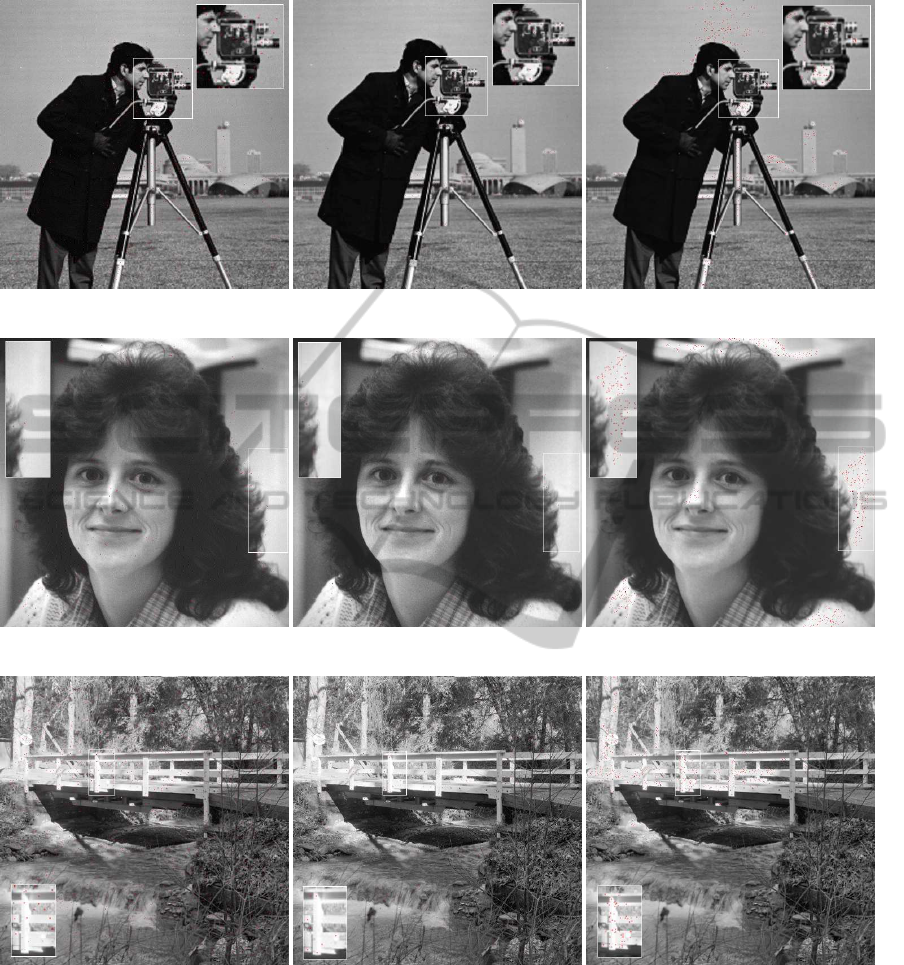
Figure 4: Bright key-points search in sharp and human posture images: from the left SURF result, SIFT result and CSA result.
Figure 5: Bright key-points search in sharp and human face images: from the left SURF result, SIFT result and CSA result.
Figure 6: Bright key-points search in landscape images: from the left SURF result, SIFT result and CSA result.
son to SURF one can notice many similarly detected
points, what proves CSA efficiency.
3.2 Bright Areas in Images
Let us now present research results for bright objects
localization, see figures 4 – 6. Bright objects are
present in many different images. They can represent
objects in landscape (bright or lightened construc-
tions), natural phenomena (clouds, sun, stars, etc.),
human figures or human appearance (gray hair, eyes,
make-up, bright clothing, etc.).
We can see that dedicated CSA can easily find
bright objects of different shapes. CSA pointed hu-
man faces or bright clothes. Our method pointed
bright parts of camera (see figure 4). It correctly lo-
calized brightest areas of human faces (see figure 5).
In figure 4 one may see bright parts - details of mech-
anisms pointed by presented CSA. Dedicated CSA is
also efficient in locating bright or lightened construc-
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
162

tions like buildings or bridges present in figures 4 or
6.
3.3 Conclusions
Application of CSA helps to find key-points in exam-
ined 2D images. Human postures, face appearance,
detailed objects like mechanisms or some nature ele-
ments (trees or shades) can be efficiently searched for.
High contrast of each pixel in relation to surroundings
increases CSA efficiency. If the algorithm must find
points among many pixels of similar kind it may be
complicated. For example if photos were taken dur-
ing night, all objects of dark properties are darkened,
therefore these areas may be not so easy to find. All
these made process more complicated. However sim-
ilar to dark areas all bright areas were found by CSA
even using very small number of individuals.
4 FINAL REMARKS
Dedicated CSA allows to easily and reliably select
areas of interest. At the same time, CSA allows to
efficiently explore entire image in search for objects
without complicated mathematical operations. This
feature is it’s main advantage. As presented in sec-
tion 3.1 and 3.2, CSA found areas of interest cover-
ing them with key-points (red pixels), while SURF
or SIFT concentrate mainly on borders. This makes
CSA efficient tool for AI classifiers. Moreover per-
formed operations are simple and have low complex-
ity. We just use (5) – (6) to search entire examined 2D
images. Research presented in this paper show that
EC methods, in particular CSA, can be valuable tools
for key-points search in 2D images of any kind. The
algorithm gives good results if one is looking for pat-
terns representing human shapes or architecture. Re-
sults of research show that low complexity (we have
used only 120 points in 40 iterations) does not influ-
ence efficiency. We have presented only basic con-
cept of CSA application in key-points search process.
It is necessary to continue research. We will try to ex-
amine impact of bigger populations on precision and
complexity. It seems that (5) can be improved to even
better choose potential key-points. Moreover it can be
efficient to examine if other Gauss distributions can
improve this process. Another idea is to perform sim-
ilar research using other EC methods.
REFERENCES
Abeles, P. (2013). Speeding up surf. In ADC’2013 - Lecture
Notes in Computer Science, number 8034, pages 454–
464. Springer.
Azad, P., Asfour, T., and Dillmann, R. (2009). Combin-
ing harris interest points and the sift descriptor for fast
scale-invariant object recognition. In IROS’2009 Pro-
ceedings, pages 4275 – 4280. IEEE.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Surf: Speeded up robust features. Computer Vision
and Image Understanding, 110(3):346–359.
Bhargava, V., Fateen, S., and Bonilla-Petriciolet, A. (2013).
Cuckoo search: a new nature-inspired optimization
method for phase equilibrium calculations. Fluid
Phase Equilibria, 337:191–200.
Brown, M. and Lowe, D. (2002). Invariant features from
interest point groups. In BMVC’2002 Proceedings,
pages 656–665.
Bulatovi´c, R., Bordevi´c, S., and Dordevi´c, V. (2013).
Cuckoo search algorithm: a metaheuristic approach
to solving the problem of optimum synthesis of a six-
bar double dwell linkage. Mechanism and Machine
Theory, 61:1–13.
Chandrasekaran, K. and Simon, S. (2012). Multi-objective
scheduling problem: hybrid appraoch using fuzzy as-
sisted cuckoo search algorithm. Swarm and Evolu-
tionary Computation, 5(1):1–16.
Chifu, V., Pop, C., Salomie, I., Suia, D., and Niculici, A.
(2012). Optimizing the semantic web service com-
position process using cuckoo search. In IDC’2012
- Studies in Computational Intelligence, number 382,
pages 93–102. Springer.
Decker, P. and Paulus, D. (2011). Model based pose es-
timation using surf. In ACCV’2010 - Lecture Notes
in Computer Science, number 6469, pages 11–20.
Springer.
Gabryel, M., Nowicki, R. K., Wo´zniak, M., and Kempa,
W. M. (2013). Genetic cost optimization of the
GI/M/1/N finite-buffer queue with a single vacation
policy. In ICAISC’2013 - Lecture Notes in Artificial
Intelligence, number 7895, pages 12–23. Springer.
Gabryel, M., Wo´zniak, M., and Nowicki, R. K. (2012). Cre-
ating learning sets for control systems using an evolu-
tionary method. In SIDE’2012 (ICAISC’2012) - Lec-
ture Notes in Computer Science, number 7269, pages
206–213. Springer.
Gossow, D., Decker, P., and Paulus, D. (2011). An
evaluation of open source surf implementations. In
RoboCup’2010 - Lecture Notes in Computer Science,
number 6556, pages 169–179. Springer.
Lowe, G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Mehrotra, H., Majhi, B., and Gupta, P. (2009). Annular
iris recognition using surf. In PReML’2009 - Lecture
Notes in Computer Science, number 5909, pages 464–
469. Springer.
Moravej, Z. and Akhlaghi, A. (2013). A novel approach
based on cuckoo search for DG allocation in distri-
BasicConceptofCuckooSearchAlgorithmfor2DImagesProcessingwithSomeResearchResults-AnIdeatoApply
CuckooSearchAlgorithmin2DImagesKey-pointsSearch
163

bution network. International Journal of Electrical
Power & Energy Systems, 44(1):672–679.
Nelson, R. and Selinger, A. (1998). Large-scale tests of a
keyed, appearance-based 3-d object recognition sys-
tem. Vision Research, 38(15):2469–2488.
Nowak, A. and Wo´zniak, M. (2008). Multiresolution
derives analysis of module mechatronical systems.
Mechanika, 6(74):45–51.
Pavlyukevich, I. (2007). L´evy flights, non-local search
and simulated annealing. Journal of Computational
Physics, 266(2):1830–1844.
Pope, A. and Lowe, D. (1998). Probabilistic models of
appearance for 3-d object recognition. International
Journal of Computer Vision, 40(2):149–167.
Schiele, B. and Crowley, J. (2000). Recognition with-
out correspondence using multidimensional receptive
field histograms. International Journal of Computer
Vision, 36(1):31–50.
Schmid, C. and Mohr, R. (1997). Local gray value invari-
ants for image retrieval. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 19(5):530–534.
Se, S., Lowe, D., and Little, J. (2002). Global localization
using distinctive visual features. In ICIROS’2002 Pro-
ceedings, pages 226–231.
Shokoufandeh, A., Marsic, I., and Dickinson, S. (1999).
View-based object recognition using saliency maps.
Image and Vision Computing, 17:445–460.
Sun, C., Wang, J., Liu, Z., and Li, J. (2013). Weighted
multi-scale image matching based on harris-sift de-
scriptor. TELKOMNIKA, 11(10):5965–5972.
Valian, E., Tavakoli, S., Mohanna, S., and Haghi, A.
(2013). Improved cuckoo search for reliability op-
timization problems. Computers & Industrial Engi-
neering, 64(1):459–468.
Vazquez, R. (2011). Training spiking neural models using
cuckoo search algorithm. In CEC’2011 Proceedings,
pages 679–686. IEEE.
Walton, S., Hassan, O., Morgan, K., and Brown, M. (2011).
Modified cuckoo search: a new gradient free op-
timization algorithm. Chaos, Solitons & Fractals,
9(44):710–718.
Wang, F., He, X., Wang, Y., and Yang, S. (2012). Markov
model and convergence analysis based on cuckoo
search algorithm. Journal Computer Engineering,
11(38):180–185.
Wo´zniak, M. (2013). On applying cuckoo search algorithm
to positioning GI/M/1/N finite-buffer queue with a
single vacation policy. In MICAI’2013 Proceedings,
pages 59–64. IEEE.
Wo´zniak, M., Kempa, W. M., Gabryel, M., and Nowicki,
R. K. (2014a). A finite-buffer queue with single vaca-
tion policy - analytical study with evolutionary posi-
tioning. International Journal of Applied Mathemat-
ics and Computer Science, (accepted–in press).
Wo´zniak, M., Kempa, W. M., Gabryel, M., Nowicki, R. K.,
and Shao, Z. (2014b). On applying evolutionary com-
putation methods to optimization of vacation cycle
costs in finite-buffer queue. In ICAISC’2014 - Lecture
Notes in Artificial Intelligence, number 8467, pages
480–491. Springer.
Wo´zniak, M. and Marszałek, Z. (2014). An idea to ap-
ply firefly algorithm in 2d image key-points search.
In ICIST’2014 - Communications in Computer and
Information Science, number (accepted–in press).
Springer.
Wo´zniak, M., Połap, D., and Marszałek, Z. (2014c). On
handwriting preprocessing for 2D object recognition
systems. In IPCT’2014 Proceedings, pages 46–53.
The IRED, Digital Seek Library.
Yang, X. and Deb, S. (2009). Cuckoo search via l´evy flights.
In NaBIC’2009 Proceedings, pages 210–214.
Yang, X. and Deb, S. (2013). Multiobjective cuckoo search
for design optimization. Computers & Operations Re-
search, 6(40):1616–1624.
Zhang, Z., Deriche, R., Faugeras, O., and Luong, Q. (1995).
View-based object recognition using saliency maps.
Artificial Intelligence, (78):87–119.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
164
