
Depth Sensor Placement for Human Robot Cooperation
Max St¨ahr, Andrew M. Wallace and Neil Robertson
School of Engineering and Physical Sciences, Heriot Watt University, Edinburgh, U.K.
Keywords:
Mobile Robot Sensor Placement, Collision Avoidance, Human Robot Cooperation.
Abstract:
Continuous sensing of the environment from a mobile robot perspective can prevent harmful collisions be-
tween human and mobile service robots. However, the overall collision avoidance performance depends
strongly on the optimal placement of multiple depth sensors on the mobile robot and maintains flexibility
of the working area. In this paper, we present a novel approach to optimal sensor placement based on the
visibility of the human in the robot environment combined with a quantified risk of collision. Human visi-
bility is determined by ray tracing from all possible camera positions on the robot surface, quantifying safety
based on the speed and direction of the robot throughout a pre-determined task. A cost function based on
discrete cells is formulated and solved numerically for two scenarios of increasing complexity, using a CUDA
implementation to reduce computation time.
1 INTRODUCTION
Mobile service robots have significant potential for
factory automation, however safety is of paramount
importance. The main concern in human robot co-
operation is sudden, unforeseen contact between a
robot and a human and of severe force and pres-
sures on the human body. Approaches to safe hu-
man robot cooperation can be divided into two cat-
egories: limiting the consequences of an impact and
avoiding a collision. In the former case, the in-
juries of unexpected human-robotimpacts can be lim-
ited by lightweight/compliant mechanical design of
the manipulator and post-collision reaction strategies
(De Luca et al., 2006).
However, reducing risk by mechanical design also
reduces the payload of the robot system, and safety
may well be compromised in unstructured environ-
ments. In the latter case, collision avoidance based on
exteroceptive sensors is independent of the payload
and mass of the robot (Angerer et al., 2012). Early
developments utilized fixed, mounted intensity cam-
eras (Ebert and Henrich, 2002) (Henrich and Gecks,
2008) to detect overlapping silhouettes of robots and
obstacles. Later developments used 3D environment
perception in real time to improve collision avoidance
for human robot cooperation and Euclidean distance
related robot velocity controls (Fischer and Henrich,
2009) (Graf et al., 2010) (Lenz, 2012). However,
surveillance of the operational area of a mobile robot
by a static sensor network is undesirable because
many sensors are required to cover a large area, and
it lacks flexibility if the task or operating environment
is changed. Rather, mounting the sensors on the robot
so that they have a dynamic perspective gives much
greater flexibility.
The major drawback of this approach is the prob-
able interaction between the robot-mounted sensors
and the mobile platform and manipulators which can
result in large shadowed volumes and consequent un-
seen collisions. A necessary strategy is to raise the
number of sensors to decrease shadowed volumes, but
computational and power resources are limited. The
problem of optimal placement becomes even more
challenging as the sensor positions change with robot
movement.
1.1 Related Work
We pose the problem as one of optimization with re-
spect to a cost function that maximises the visibility
with regard to regions of potential robot human col-
lision. Systematic optimization of static camera se-
tups is a known challenge in surveillance tasks, aim-
ing to minimize the demanded resources while con-
currently maximizing surveillance. The visibility as-
pect of the problem can be regarded as an extension
of the art gallery problem which consists of finding
the minimum number of cameras to survey a given
space (O’rourke,1987). The distinction from the orig-
311
Stähr M., M. Wallace A. and M. Robertson N..
Depth Sensor Placement for Human Robot Cooperation.
DOI: 10.5220/0005017103110318
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 311-318
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

inal art gallery problem is that our guard is moving
along on a pre-defined robot path and our objective is
to maximise visibility of regions where the possibility
of collision is greatest.
Numerical solutions decompose the workspace
into equal sized cells and assign to each a binary at-
tribute indicating whether or not it is seen by a sensor
at a certain position. The number of sensors is raised
and their positions are varied until the optimum is
found (Dhillon et al., 2002). Often the system perfor-
mance has been described as the detection of certain
features in the surveyed scene such as humans (Yao
et al., 2008), (Bodor et al., 2007) or robot paths (Niko-
laidis et al., 2009) which are not equally distributed
over the grid. A cost function is utilized to factor the
quality of feature recognition at a certain cell from a
known sensor position. Including the presence of oc-
cluders, e.g. other humans (Mittal and Davis, 2008)
or pillars (Chen and Davis, 2008) improves the over-
all performance of such systems in dynamic surround-
ings.
The grid is extended to a voxel grid for a three
dimensional feature distribution. In the work of
Flacco (Flacco and De Luca, 2010) the position of
depth and presence sensors is optimized for a fixed
robot arm and human sharing the same workspace. A
probabilistic visibility approach for pre-defined robot
motion and human presence distribution is delineated.
Sensor mounting positions are restricted to the sur-
rounding wall and obstructions include the robot arm
and the human itself as well as static environment ob-
jects such as walls and tables. We extend the approach
of Flacco to dynamic environments with pre-defined
human and robot movements. The major extensions
to Flacco’s work presented here are the use of moving
cameras on the mobile robot and the introduction of
a safety criterion which reflects the consequences of
human robot collisions.
Concepts of robot safety were developed mainly
in human aware robot motion planners. The human
position is determined and the robot’s velocity or tra-
jectory is adapted according to the distance (Had-
dadin, 2013), robot arms inertia (Kulic and Croft,
2007) and direction (Sisbot et al., 2010). More com-
plex approaches build up velocity related scalar fields
for each robot arm link and superimpose them on a
resulting field according to the current joint config-
uration and speed (Lacevic and Rocco, 2010). The
number of sample points is bounded to fulfil real time
constraints of the motion controllers. Here, we extend
the scalar field of Lacevic to the robot mesh and apply
it to arbitrary and complex robot shapes and geomet-
ric structures because the source of danger is not the
geometric centre of link, rather the solid outer shape
of the robot.
We have chosen to formulate a numeric approach
for optimal depth sensor placement for collision
avoidance on mobile robots. The working area is de-
composed into cells of equal size and each cell is as-
signed with both binary visibility and scalar danger
attributes representing the potential collision in this
cell. We specify the vertices of a mesh of the outer
robot shape as potential sensor positions and sample
all three rotational degrees of freedom for each posi-
tion. A cost function depending on the sensor’s po-
sition and orientation is introduced and numerically
minimized by complete enumeration as this is an of-
fline process.
This paper is organized as follows. Sections 2
and 3 describe the robot, human and sensor model as
well as the work cell decomposition based on visibil-
ity. Section 4 introduces the quantifying safety mea-
surement utilized in the cost function introduced in
section 5. Section 6 provides two experiments with
increasing complexity and section 7 summarises the
results and gives an outlook on future work.
2 ROBOT AND HUMAN
MODELING
We model the robot as an articulated, rigid body chain
consisting of static meshes and time variant homoge-
neous transformations T
t
at time t. The position and
orientation of the m-th link w. r. t. a global coordinate
origin can be expressed by:
0
T
m
=
0
T
1
...
m−1
T
m
(1)
in which
i−1
T
i
describes the homogenous link-to-link
transformation following the Denavit-Hartenberg-
convention and mapping a robot state vector q
r,t
as
q
r,t
= [x
r,t
y
r,t
θ
r,t
a
1,t
···a
6,t
]
T
(2)
in which x
r,t
, y
r,t
, θ
r,t
expresses the translational and
rotational displacement of the mobile platform associ-
ated with the mobile robot frame T
mr,t
and a
1,t
···a
6,t
are the joint angles of the 6R (6 rotatory joints) robot
arm at time t. The complete robot shape RM
t
is de-
fined as the union of all meshes M
n
transformed ac-
cording to their parent link frame T
n,t
at time t.
The human is represented as a rigid stick fig-
ure considering Cartesian position and gaze direction.
Following that simplification the human state vector
q
h,t
at time t is expressed as:
q
h,t
= [x
h,t
y
h,t
θ
h,t
]
T
(3)
and associated with the frame T
h,t
having an equiva-
lent state vector to the mobile platform.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
312
3 SENSOR MODELING
Each of the depth sensors is modelled as a virtual
camera. Each ray that passes through the focal cen-
tre F
c
assigns its data to a point on the image plane
IP. The image coordinates x on IP are expressed by
the pin hole projection equation:
x = PX = KEX (4)
The intrinsic parameters are stored in the camera ma-
trix K, and the extrinsic homogenous transformation
E is used to obtain the projection matrix P. All Carte-
sian points X on the same ray lead to the same value
of x. The depth of a Cartesian point to a known cam-
era position is given by:
depth(X) = kF
c
− Xk (5)
We store the depth information along the ray of the
corresponding pixel on the IP and name it depending
on its source.
3.1 Sensor Position
As we mount the sensor on the mobile robot the posi-
tion and orientation of the sensor depends at least on
the frame T
mr,t
, thus our objective is to optimize the
sensor position vector q
c
w.r.t to T
mr,t
:
q
c
= [x y z roll pitch yaw]
T
(6)
In this work we make a simplification and attach the
focal centre of the camera to one point of the complete
initial robot mesh RM
i
for a
1
...a
6
= 0. On a real
robot the focal centre cannot be attached directly to
the robot hull as there are mounting constraints, such
as minimum distance to the hull or forbidden regions
such as drives, gripper, wheels or laser scanners. In
this work we define the set of all possible camera po-
sition on the robot as:
P
c
= {q
c
∈ R
6
:q
c,1
... q
c,3
∈ RM
i
∧
− π < q
c,4
...q
c,6
≤ π}
(7)
As the camera may be attached to the robot
arm, its position and orientation may vary for any
a
1
...a
6
6= 0. We compute the resulting position and
orientation of the sensor by determining the local,
time invariant transformation
T
n
T
c
between the cam-
era frame T
c
in the base of the link frame T
n
to which
it is attached, building the closed kinematic chain via
T
mr
:
T
m
T
c
=
mr
T
T
m
−1
mr
T
c
∀ q
r
(a
1
...a
6
= 0) (8)
Now we can extend the kinematic chain from equa-
tion 1 by the time invariant transformation
T
m
T
c
to:
mr
T
c
=
0
T
1
...
m−1
T
m
T
m
T
c
∀ q
r
(9)
and determine the camera frame w.r.t to the mobile
platform
mr
T
c
for all q
r,t
.
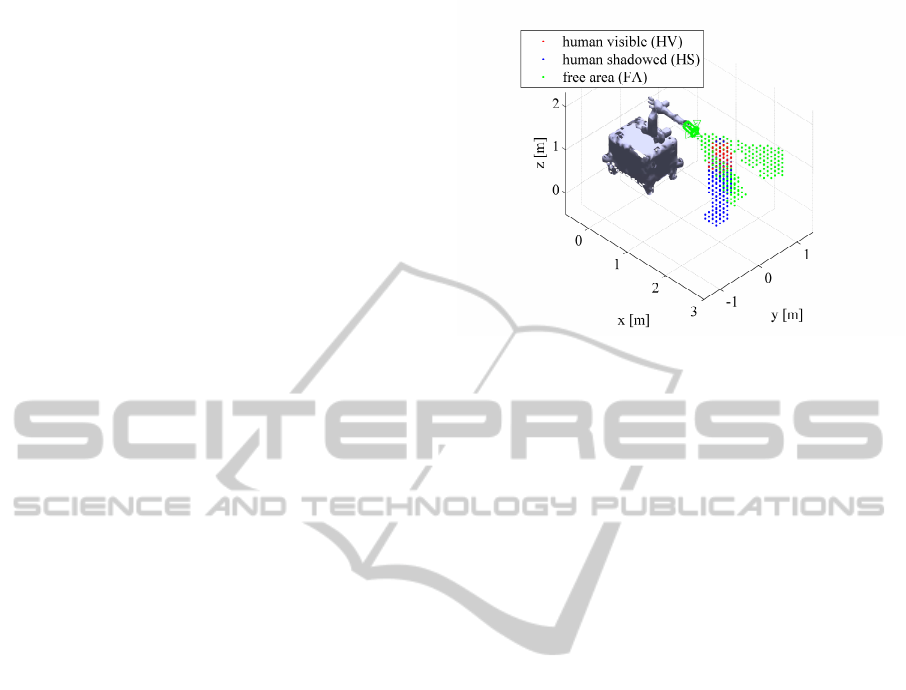
Figure 1: workspace decomposition.
3.2 Work Cell Decomposition
We decompose the mobile platform centered cell WC
around a mobile robot in N regular cells of equal edge
length. Each cell belongs to one of the following set.
The free area FA represents the set of all Cartesian
cells which are in the field of view (FOV) of the depth
sensor but do not belong to either the robot R, the en-
vironment E (static objects) or the human H. The
dark area DA sums all the cells outside the FOV for
which we have no information. In contrast to pre-
vious work Flacco (Flacco and De Luca, 2010) we
do not distinguish between sources of DA, rather we
maximise the visible human cells HV, which are the
difference set of human H and human shadowed HS
sets. Summarizing, at any time t, the following rela-
tion holds:
WC(t) = FA(t) ∪ DA(t) ∪ R(t) ∪ E(t) ∪ H(t)
H(t) = HV(t) ∪ HS(t)
HS(t) = H(t) \ HV(t)
(10)
Following the notation of a depth sensor from
equation 5, we define two depth images: the envi-
ronment depth map E
DM
and the human depth map
H
DM
. For a pixel x associated with Cartesian points
lying on the ray PX = x that intercept the robot or the
environment, we set
E
DM
(x) = min
X∈R∪E
PX=x
depth(X) (11)
and
H
DM
(x) = min
X∈H
PX=x
depth(X) (12)
if it intercepts the human body. As we ray trace the
environment and the human separately we can now
compare the depth image pixel by pixel to determine
DepthSensorPlacementforHumanRobotCooperation
313

Figure 2: kinetostatic danger field applied to mobile robot
at z=0.5m for ˙q
r,t
= [1.0,0. . . 0]
T
.
the human shadowed volume and free area as follows:
FA = {X ∈ WC :d
min
≤ depth(X) < d
max
AND
H
DM
(PX) > depth(X) AND
E
DM
(PX) > depth(X)}
(13)
HV = { X ∈ H :d
min
≤ depth(X) < d
max
AND
H
DM
(PX) ≤ depth(X) AND
H
DM
(PX) < E
DM
(PX)}
(14)
for all Cartesian points. As our goal is to optimize for
multiple sensors we define a sensor state vector s for
n sensors as the n-times product set of P
c
:
s ∈ (P
c
)
n
(15)
representing position and orientation of the nth sensor
following the definition of P
c
in equation 7. The re-
sulting free and human shadowed areas for n sensors
can be described respectively as the union intersec-
tions of the corresponding sets for each single cam-
era:
FA
s
=
\
c=1...n
FA
c
(16)
HS
s
=
[
c=1...n
HS
c
(17)
4 SAFETY COSTS
In this work a kinetic-static danger field (KSDF) cap-
tures the complete state for safe motion planning of
an articulated robot (Lacevic and Rocco, 2010) to
quantify safety. Two scalar distance related fields: a
quadratic decreasing dynamic field and a linear de-
creasing static field, are superimposed. The dynamic
field does not just consider the distance between the
source of danger r
t
and sample point r, it also includes
the angle between the translational velocity vector ~v
t
and the direction vector r − r
t
as expressed in equa-
tion 18 and illustrated in figure 2.
DF(r,r
t
,~v
t
) =
k
2
|~v
t
|[γ+ cos∠(r− r
t
,~v
t
)]
|r− r
t
|
2
+
k
1
|r− r
t
|
(18)
The constant γ ≥ 1 eliminates the change of sign at-
tribute of the cosine. The original field of application
of the KSDF is human aware robot motion planning,
thus the number of points r on the robot are limited to
discrete points on the link of the robot arm between
two joints. This approach has been extended to all
points of an arbitrary complexrobot mesh RM
t
at time
t as the source of danger is not the geometric link but
the solid outer hull of the robot. The meshes have
been re-sampled at a unique resolution of 5 cm so the
danger field is equally distributed over the robot. The
velocity vector v
t
is calculated using forward kinemat-
ics from equation 1 and the Jacobian of each transfor-
mation
i−1
T
i
.
The danger field is accumulated over all vertices
of the robot mesh RM
t
for each centre of cell C
i
as
formulated in equation 19. The resulting scalar field
is illustrated in figure 2 for a height of z = 0.5 m and a
translational velocity of 1 m/s in the positive x direc-
tion.
KSDF(C
i
) =
|RM
t
|
∑
j=0
DF(C
i
,RM
t
( j), v
t
(RM
t
( j))) (19)
5 OPTIMAL DEPTH SENSOR
PLACEMENT
Using the components defined in the previous sec-
tion, we can compute a cost function with additional
assigned weights, w
HS
and w
FA
to compute a single
scalar value for a given camera state vector s.
J(s) =
1
|P
rh
|N
|P
rh
|
∑
j=1
N
∑
i=1
w
HS
HS
s, j
(C
i
)KSDF(C
i
)−
w
FA
FA
s, j
(C
i
)KSDF(C
i
)
(20)
for
w
HS
w
FA
>
N
∑
i=1
KSDF(C
i
)
The cost function J(s) sums all the human shadowed
cells multiplied by the corresponding KSDF value.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
314

Positions, in which the human is close to the robot
path and not seen are prioritised. The cost function is
lowered by the weighted cells of FA to maximize the
visible area for equal human visibility. w
HS
is much
larger than w
FA
so that maximizing the free area is a
secondary objective.
The algorithm for optimal depth sensor placement
is divided into two phases: initiation and optimiza-
tion. During the initialization phase the human shad-
owed volume and the free area for each possible ge-
ometric arrangement are determined as illustrated in
algorithm 1. A geometric arrangement is defined as
a combination of q
c
, q
r,t
and q
h,t
. We specify the set
P
c
as the set of all possible q
c
with an equivalent P
r
for robot positions and P
h
for human positions. For
each member of P
c
we determine HS and FA for all
members of P
rh
= P
r
× P
h
. If for at least one member
of P
rh
the relation H 6= HS holds, then q
c
is stored in
the set of valid camera position P
valid
, thus the human
is visible in at least one geometric arrangement of P
rh
.
To reduce computation in the optimization phase, we
neglect all q
c
which have no contribution to the cost
function (1).
In the optimization step (see algorithm 2) we de-
fine S as the set of all possible camera state vectors s
for a given set, P
valid
, and a number of cameras n
c
.
S = {s ∈ P
valid
n
c
: no repetition of s} (21)
In this work we used a single camera type and the
order of q
c
in vector s does not matter because each
sensor has equal visibility for the same q
c
. Conse-
quently, the cardinality of S can been described by the
binomial coefficient:
|S| =
|P
valid
|
n
c
(22)
During optimization we raise the number of cameras
until complete human visibility is reached. We are
looking for the minimum cost in which the human is
completely visible which is expressed as |HS
s
| = 0 for
all positions in P
rh
.
The optimisation step implies that the human will
be visible for a finite number of cameras, however if
the human is covered behind a static obstacle (e.g. a
pillar) that is not the case. In the future we will in-
troduce a second criterion to check human visibility
compared to the least number of sensors. The opti-
misation will be stopped if an additional sensor does
not improve human visibility and the solution with the
lowest cost from the previous number of sensors will
be regarded as optimum.
Data: P
c
, P
r
, P
h
Result: P
valid
P
valid
=
/
0;
foreach q
c
∈ P
c
do
qcvalid = false;
foreach q
r,t
∈ P
r
do
build
0
T
mr
from q
r,t
;
adjust E according to
0
T
mr
−1
;
adjust RM
t
according to q
r,t
;
assign RM
t
to R;
find
mr
T
c
from RM
t
and q
r,t
;
ray trace EDM for current
mr
T
c
;
foreach q
h,t
∈ P
h
do
find
mr
T
h
;
adjust H according to
mr
T
h
;
ray trace HDM for current
mr
T
c
;
determine HS and FA;
add HS and FA to HStemp and
FAtemp;
if H 6= HS then
qcvalid = true;
end
end
end
if qcvalid then
add q
c
to P
valid
;
store HStemp and FAtemp;
end
end
Algorithm 1: Initialization step.
6 EXAMPLES OF OPTIMAL
PLACEMENTS
We have performed two experiments with increasing
complexity. Both experiments were performed with a
depth camera model of 64 × 50 pixel resolution and
30
◦
× 40
◦
FOV. The robot centred workspace had di-
mensions of 6 m in width and length and 3 m in
height. It was decomposed into 131.072 cells hav-
ing an equal edge length of 9.375cm. We used a fast
voxel traversal algorithm for ray tracing (Amanatides
and Woo, 1987) because our environment model con-
sists of an occupancy grid and we are not interested in
very accurate depth images, instead we focus on small
computational cost. All experiments were performed
on a workstation equipped with an Intel Xeon W3680
and 18GB of ram. The ray tracing and cost function
evaluation was performed using CUDA on a NVidia
GTX670 device with 1536 Cuda cores.
In the first experiment we evaluated all possible
DepthSensorPlacementforHumanRobotCooperation
315
Data: P
valid
Result: s
opti
n
c
= 1;
mincosts = MAX;
while true do
S = (P
valid
)
n
c
;
abort = false;
foreach element s of S do
costs = J(s);
if |HS
s
| = 0 then
abort = true;
end
if costs < mincosts then
mincosts = costs;
s
opti
= s;
end
end
if abort then
break;
end
n
c
+ +;
end
Algorithm 2: Optimization step.
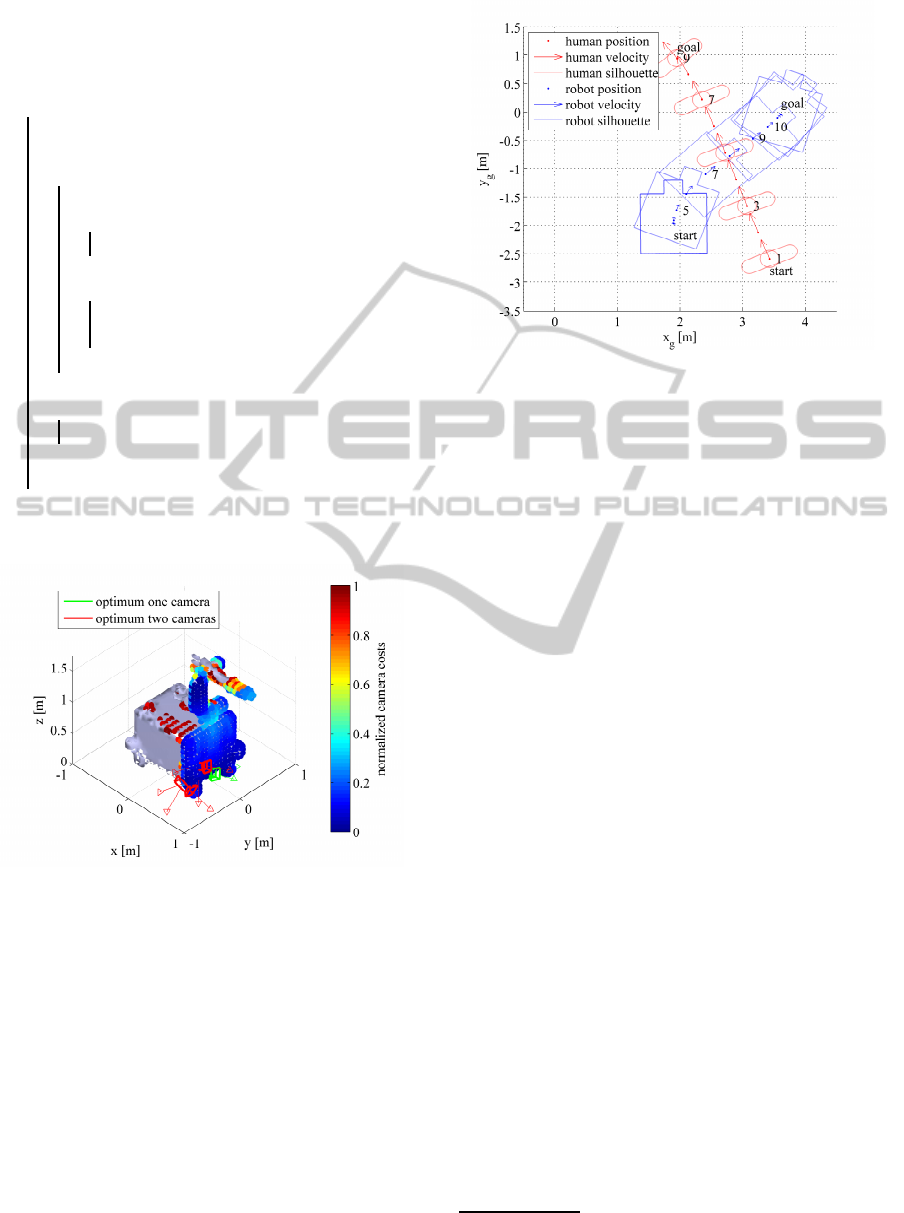
Figure 3: Results for multiple sensors, one human robot
position.
camera positions and orientation for a single robot hu-
man position pair. The second experiment evaluates
a path scenario displayed in figure 4 in which the hu-
man crosses the robot path. In the second scenario we
were just able to compute the cost function for a sin-
gle camera position because of limited computational
resources.
6.1 Multiple Sensors, one Human Robot
Position
The geometric arrangement of the first experiment is
illustrated in figure 1. The human is standing at 2.5
Figure 4: Human and robot path.
m in the positive x direction in front of the robot.
We have evaluated 2,590 possible camera positions
on the robot and sampled each angular degree of free-
dom 10 times, thus the resulting number of samples
is 2,590,000. The minimum cost value for all an-
gles of the same Cartesian position of P
valid
is illus-
trated by the colour value of the Cartesian point in
figure 3. |P
valid
| was 241,660, thus the amount of
sample points for the multi camera optimisation was
reduced to 10.71 % of the original amount of position
and orientations. This reduction is important as the
number of samples to be evaluated for each camera
is increased according to the binomial coefficient of
equation 22.
The complete human visibility was found with
two cameras after 176 sec, as displayed in figure 3.
The optimal solution for one camera is close to the
ground as the distance to the human body increases,
which results in a large volume covered. The sec-
ond camera for the optimal solution for two cameras
is almost overlapping with the optimal solution for a
single camera because the second camera maximizes
the secondary criterion, the visibility of free area.
6.2 One Sensor, Multiple Human Robot
Positions
In the second experiment we evaluated the camera
costs for a single camera in a dynamic scenario with
human and robot trajectories displayed in figure 4.
The robot trajectory was generated using the origi-
nal path planner from the robot manufacturer
1
giving
equivalent paths in real world. The human path was
generated using the motion planner for the holonomic
1
http://www.neobotix-robots.com/industrial-robot-mm-
800.html
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
316
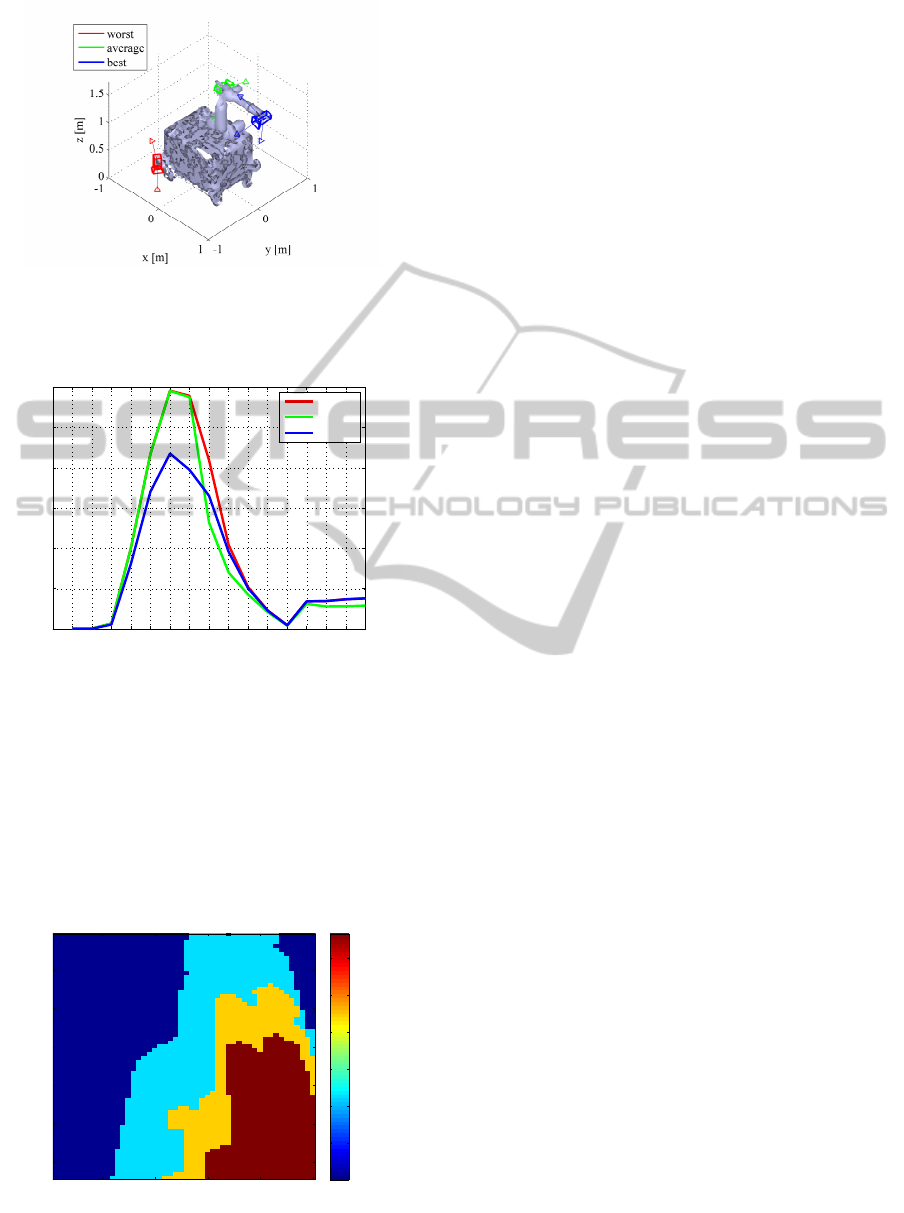
Figure 5: Best, medium and worst camera position on the
robot.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
0
10
20
30
40
50
60
robot positions of P
r
average costs for all elements of P
h
worst
average
best
Figure 6: Best, medium and worst camera position on the
robot.
mobile robots of Siegwart (Siegwart et al., 2011) tak-
ing the human motion constraints of Brogan (Brogan
and Johnson, 2003) into account. The paths were
sampled at a time step of 1 sec. The cardinality of
P
rh
was 156 consisting of 9 human and 16 robot po-
u [px]
v [px]
10 20 30 40 50
10
20
30
40
50
60
human visibility per pixel
0.05
0.1
0.15
0.2
0.25
0.3
Figure 7: Human visibility per pixel for the best camera
position.
sitions from which 143 configurations were without
collisions and considered in the cost function. All
2,590,000 camera positions were evaluated in 366 sec
utilizing the cost function from equation 20 for multi-
ple human robot positions.
The worst, average and best camera positions for
the second scenario are illustrated in figure 5. The av-
erage costs over all human positions for a single robot
position are compared in figure 6. All three camera
positions have their minimum at p
r,1
and p
r,12
respec-
tively and their maximum at p
r,6
. The robot does not
move instantly, thus the robot translational speed is
zero followed by a clockwise turn. Consequently the
KSDF is almost zero at p
r,1
which causes very low
costs for all sensor positions. The maximum cost
value is reached at p
r,6
because the robot is almost in-
tersecting the human path, therefore the human robot
distance is very low which causes a very high KSDF
value for human shadowed cells. The second mini-
mum at p
r,12
is caused by a second stop before turning
counter clockwise which results in better performance
for the average position as it is now turned towards
the human path. All three camera positions perform
equally if the human is not seen by any of them be-
cause the free area behaves as a secondary criterion
as explained in section 5.
The human visibility at p
r,6
for all human posi-
tions of the best camera position can be seen in fig-
ure 7. The best camera position covers the first half of
the human path, nevertheless the human is just visible
in one third of the human positions. Multiple sensors
are required to increase human visibility and improve
collision avoidance.
7 CONCLUSION
A novel approach to the placement of multiple depth
sensors on a mobile robot for human robot cooper-
ation is presented in this work. We have quanti-
fied the danger of collision between a human and a
robot in pre-determined task positions and combined
this with maximum human visibility to obtain a nu-
merically solvable cost function. Experiments have
shown promising results for optimal camera place-
ment using the cost function, but in future work these
need to be further evaluated by running more com-
plex scenarios in simulation before moving to real
world scenarios. Even simple scenarios with small
robot and human trajectories require 4.5 days for sin-
gle camera optimisation with poor human visibility.
However, real world cooperative human robot sce-
narios consist of numerous tasks, task execution or-
ders and varying robot and human trajectories. Even
DepthSensorPlacementforHumanRobotCooperation
317

though computation is offline, exhaustive enumera-
tion of a large number of potential robot, sensor and
human positions combined with finite computational
resources demands further research into both the can-
didate function for single and multi-camera place-
ment, and an optimisation strategy that does not re-
quire such exhaustive enumeration. Promising ap-
proaches are genetic algorithms (Dunn et al., 2006)
or simulated annealing (Mittal and Davis, 2008) for
highly non-linear optimisation to reduce the number
of camera state vectors s to be evaluated. Fast opti-
misation strategies enable online robot path planning
for full human visibility and best collision avoidance
performance.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the support
of the University of Applied Sciences, Ingolstadt
and the Engineering and Physical Research Council
(EP/J015180/1 Sensor Signal Processing).
REFERENCES
Amanatides, J. and Woo, A. (1987). A fast voxel traversal
algorithm for ray tracing. In Proceedings of EURO-
GRAPHICS.
Angerer, S., Strassmair, C., Staehr, M., Roettenbacher, M.,
and Robertson, N. (2012). Give me a hand. In Tech-
nologies for Practical Robot Applications (TePRA),
2012 IEEE International Conference on.
Bodor, R., Drenner, A., Schrater, P., and Papanikolopoulos,
N. (2007). Optimal camera placement for automated
surveillance tasks. Journal of Intelligent & Robotic
Systems.
Brogan, D. C. and Johnson, N. L. (2003). Realistic hu-
man walking paths. In Computer Animation and So-
cial Agents, 2003. 16th International Conference on.
Chen, X. and Davis, J. (2008). An occlusion metric for se-
lecting robust camera configurations. Machine Vision
and Applications.
De Luca, A., Albu-Schaffer, A., Haddadin, S., and
Hirzinger, G. (2006). Collision detection and safe re-
action with the dlr-iii lightweight manipulator arm. In
Intelligent Robots and Systems, 2006 IEEE/RSJ Inter-
national Conference on. IEEE.
Dhillon, S. S., Chakrabarty, K., and Iyengar, S. S. (2002).
Sensor placement for grid coverage under imprecise
detections. Information Fusion, 2002. Proceedings of
the Fifth International Conference on.
Dunn, E., Olague, G., and Lutton, E. (2006). Parisian
camera placement for vision metrology: Evolutionary
Computer Vision and Image Understanding. Pattern
Recognition Letters.
Ebert, D. M. and Henrich, D. D. (2002). Safe human-robot-
cooperation: Image-based collision detection for in-
dustrial robots. In Intelligent Robots and Systems,
2002. IEEE/RSJ International Conference on. IEEE.
Fischer, M. and Henrich, D. (2009). 3D collision detec-
tion for industrial robots and unknown obstacles us-
ing multiple depth images. Advances in Robotics Re-
search.
Flacco, F. and De Luca, A. (2010). Multiple depth/presence
sensors: Integration and optimal placement for hu-
man/robot coexistence. In Robotics and Automa-
tion (ICRA), 2010 IEEE International Conference on.
IEEE.
Graf, J., Puls, S., and W¨orn, H. (2010). Recognition and un-
derstanding situations and activities with description
logics for safe human-robot cooperation. In COGNI-
TIVE 2010, The Second International Conference on
Advanced Cognitive Technologies and Applications.
Haddadin, S. (2013). Towards Safe Robots: Approaching
Asimov’s 1st Law. Springer Publishing Company, In-
corporated.
Henrich, D. and Gecks, T. (2008). Multi-camera collision
detection between known and unknown objects. In
Distributed Smart Cameras, 2008. ICDSC 2008. Sec-
ond ACM/IEEE International Conference on. IEEE.
Kulic, D. and Croft, E. (2007). Affective state estimation
for human–robot interaction. Robotics, IEEE Trans-
actions on.
Lacevic, B. and Rocco, P. (2010). Kinetostatic danger field -
a novel safety assessment for human-robot interaction.
In Intelligent Robots and Systems (IROS), 2010.
Lenz, C. (2012). Fusing multiple kinects to survey shared
human-robot-workspaces. Technical report, Techni-
cal Report Technical Report TUM-I1214, Technische
Universit¨at M¨unchen, Munich, Germany.
Mittal, A. and Davis, L. (2008). A General Method for
Sensor Planning in Multi-Sensor Systems: Extension
to Random Occlusion. International journal of com-
puter vision, 76(1):31–52.
Nikolaidis, S., Ueda, R., Hayashi, A., and Arai, T. (2009).
Optimal camera placement considering mobile robot
trajectory. In Robotics and Biomimetics, 2008. IEEE
International Conference on. IEEE.
O’rourke, J. (1987). Art gallery theorems and algorithms,
volume 1092. Oxford University Press Oxford.
Siegwart, R., Nourbakhsh, I. R., and Scaramuzza, D.
(2011). Introduction to autonomous mobile robots.
MIT Press.
Sisbot, E., Marin-Urias, L., Broquere, X., Sidobre, D., and
Alami, R. (2010). Synthesizing robot motions adapted
to human presence. International Journal of Social
Robotics.
Yao, Y., Chen, C.-H., Abidi, B., Page, D., Koschan, A.,
and Abidi, M. (2008). Sensor planning for automated
and persistent object tracking with multiple cameras.
In Computer Vision and Pattern Recognition, 2008.
IEEE Conference on. IEEE.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
318
