
Hierarchical Optimization Using Hierarchical Multi-competitive Genetic
Algorithm and its Application to Multiple Vehicle Routing Problem
Shudai Ishikawa
1
, Ryosuke Kubota
2
and Keiichi Horio
1
1
Kyushu Institute of Technology, Kitakyushu, Japan
2
Ube National College of Technology, Ube, Japan
Keywords:
Hierarchical Optimization, Genetic Algorithm, Multiple Vehicle Routing Problem, Multiple Solution Spaces.
Abstract:
In this paper a new optimization technique which is effective for hierarchical optimization problem is pro-
posed. This technique is an extension of the multiple-competitive distributed genetic algorithm (mcDGA).
This method consists of two levels upper and lower. The solution space to be searched is determined at the
upper level, and the optimum solution in a given solution space is determined at the lower level. The migra-
tion of the individual and competition is performed at the lower layer thereby optimal solution can be found
efficiently. We apply the proposed hierarchical mcDGA to the mVRP to confirm the effectiveness. Simulation
result shows the effectiveness of the proposed method.
1 INTRODUCTION
Some complex systems have hierarchical structure
which is divided into multiple levels and optimiza-
tion of such systems is known as hierarchical opti-
mization. For example, suppose that the system is di-
vided into two levels upper and lower. In the upper
level, some solution spaces to be searched are deter-
mined and at the lower level, the optimal solutions
are searched for each solution spaces which are deter-
mined in the upper level. Thus, optimal solutions at
the lower level are reflected in the upper level. At the
upper level, optimization is performed to determine
the solution space to be searched based on the result
of lower levels. By repeating this operation, the op-
timal solution of the whole system is obtained. The
example of hierarchical optimization using multiple
vehicle routing problem is shown in Figure 1. In this
problem, a product is to be delivered to a customer
by using a plurality of vehicles with minimized path
of each vehicle. As shown in Figure 1, the alloca-
tion of customer for each vehicle is optimized at the
upper level and the route is optimized at the lower
level. In this situation, the problem of the hierarchical
system, the searching space is reduced, and discov-
ery of the solution is facilitated. However, when the
optimal solution is not found at the lower level, it is
difficult to find the optimal solution for the entire sys-
tem. In addition, if much time is taken for calculation
at the lower level, computational cost will be huge in
amount.
The VehicleRoutingProblem (VRP) (Bernard and
Hubert, 1959) is a problem that minimizes the deliv-
ery path between the distribution center and the cus-
tomers. In recent years, the VRP has been attracted
much attention and studied actively. Although the
VRP is similar to the well-known Traveling Sales-
man Problem (TSP) (Flood, 1956), some constraints
are taken into account in the VRP. For instance, the
number of vehicles, the time windows (time schedul-
ing), and the capacity of vehicles and so on (Laporte,
1992). Namely, the VRP is an extension of the TSP.
In the VRP with multiple vehicles (mVRP), it is nec-
essary to minimize the total delivery path of vehicles
and therefore it is difficult to find the optimal solution
because optimization of allocation for customers of
each vehicle and the path of vehicles are performed
at the same time. To facilitate the discovery of op-
timum solution, the method of determining the cus-
tomer for each vehicle by clustering has been pro-
posed (Sofge et al., 2002), (Nallusamy et al., 2009).
In this method the discovery of the solution is facili-
tated because the solution space is reduced. However
if some constraints such as the time window or the
capacity of vehicles are added, this method cannot be
applied. It is reported that this problem is solved by
two interconnected Genetic Algorithms (GAs) (Potter
and Bossomaier, 1995). In this method, at the upper
level, a GA determines the allocation to customers of
each vehicle and at the lower level a second GA for
269
Ishikawa S., Kubota R. and Horio K..
Hierarchical Optimization Using Hierarchical Multi-competitive Genetic Algorithm and its Application to Multiple Vehicle Routing Problem.
DOI: 10.5220/0005043202690274
In Proceedings of the 11th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2014), pages 269-274
ISBN: 978-989-758-046-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Upper level optimization
Lower level optimization
Vehicle 1 Vehicle 2
Depot
Solution Space 1
Solution Space S
Solution Space 1
Individual1
Solution Space S
Individual N
Figure 1: Conceptual diagram in case of mVRP to be the
hierarchical structure.
each vehicle determines the shortest route of the cus-
tomers allocated to the vehicles. This method is valid
in solution search and difficult to set population size.
If population size is too large, computational cost is
more whereas if population size is too small, solution
cannot be found stably at the lower level.
This proposed multi-space competitivedistributed
GA (mcDGA) (Ishikawa et al., 2011), competition is
performed among different solution spaces, and the
population size of the solution space is changed based
on the result of the competition. The individual is
added to the solution space which won the compe-
tition, and the individual is removed in loser. By re-
peating this process, the proposed method terminates
the search of the solution space less likely to solution
exists, and concentrates on the individuals for the so-
lution space more likely solution exists. Namely, it
is possible to improve the stability of finding optimal
solution and reduce the computational cost.
This proposed hierarchical mcDGA is a stable and
effective search method and we apply it to the mVRP
a supposed hierarchical optimization problem. The
proposed method performs not only the optimization
of the individual but also the optimization of the solu-
tion space. Namely, in the proposed method, reducing
the computational cost and improving the stability of
discovery of the optimal solution in the lower level
are expected. We apply the proposed method to the
mVRP for two vehicles and try to show the effective-
ness.
2 MULTIPLE-VEHICLE
ROUTING PROBLEM
The multiple vehicle problem is an extension of the
well-known vehicle routing problem, this problem
consists of determining a set of routes for some ve-
hicles. Generally, the prerequisites of the mVRP are
as follows:
• The vehicles return to the depot after they leave
the depot and visit customers.
• The positional coordinates of customers are given.
• The requirement of customers is filled by either
vehicles visit only once.
• The distance of each delivery is calculated based
on the Euclidean distance between customers.
• The total delivery distance is minimized.
In this paper, we consider two vehicles without its ca-
pacity.
3 GA AND MCDGA
3.1 GA
In nature the living things adapted by the environ-
ment, survive with high possibility and they have
much opportunity to pass their genes on to their off-
spring. The GA, developed by John Holland in the
1960s (Holland, 1962), imitates the evolution of liv-
ing things and this is one of powerful optimization
algorithms. A problem to be solved and candidates
for a solution are related to the environment and in-
dividuals respectively. The features of the GA are as
follows: (1) a population that is a set of individuals is
held (2) the individuals are evolved by genetic oper-
ators such as selection, reproduction, rearrangement
and mutation (3) an evaluation of the environment is
given to each individual and (4) the individuals whose
evaluations are high survivewith a high probability by
selection and reproduction, whereas perturbation by
rearrangement and mutation produces various kinds
of individuals. In other words, in the GA, candidates
for optimal solutions for the given problem are rep-
resented as coordinates in the solution space and the
candidates search the optimal solution by re-genesis
based on selection, reproduction, mutation and so on.
The GA achieves local and global searches in the so-
lution space by employing adequate genetic opera-
tors.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
270

3.2 Multi-space Competitive
Distributed GA
The mcDGA can be constructed as an extension of the
DGA (Tanese, 1989) for multi-space solution search.
Sub-populations are prepared in the corresponding
solution spaces. Each sub-population searches an
optimal solution in the corresponding solution space
in accordance with the procedure of the GA. Dur-
ing the evolution, the mean value of the evaluations
or the max value of the evaluations and so in each
sub-population is calculated and their values are com-
pared to each other. This operation is called ”com-
petition”. The sub-populations are ranked based on
the competition. The population sizes in the supe-
rior sub-populationsincrease, on the other hand, those
decreases in the inferior ones. In particular, individ-
uals are added in the sub-population with the high-
est evaluation and one individual is removed from the
other sub-population. The individual to be added and
to be removed is randomly chosen from each sub-
population. This operation is called migration. The
migration improves the search efficiency. The sub-
population, which won the competition has the largest
population size after the convergence and thereby it
is easy to decide the correct solution space based on
the population sizes. The GA and the DGA perform
the parameter optimization. On the other hand, the
mcDGA perform not only the parameter optimiza-
tion(the solution) but also the model selection (solu-
tion space).
4 HIERARCHICAL MCDGA
In case of applying to the hierarchy problem with
mcDGA, the system is divided into upper level and
lower level. At the upper level, the allocation to cus-
tomers of each vehicle is determined. At the lower
level, the shortest route of a given allocation of cus-
tomers in each vehicle is determined. In order to per-
form efficient search, the competition and the migra-
tion are conducted at the lower level. The solution
which has determined at the lower level reflects to the
upper level, and the new solution space will be deter-
mined based on the evaluation value of the solution
at the lower level. The conceptual diagram and the
simple flow of the hierarchical mcDGA are shown in
Figure 1 and Figure 2. Generally, when GA is applied
to both the upper level and the lower level, a large
amount of computational cost is required. In addition,
the discovery rate of the optimal solution at the lower
level has a great influence on the discovery of opti-
mal solution overall. However hierarchical mcDGA
terminate the search of the solution space less likely
to solution exists and also reduce the computational
cost. Moreover the discovery rate of the optimal solu-
tion is improved by concentrating the individuals on
the solution space more likely solution exists. Since
it does not use a special method for genetic operators
and representation of an individual, it is applicable to
any hierarchical optimization problems.
5 SOLVING THE MVRP WITH
HIERARCHICAL MCDGA
In case of solving mVRP with improved mcDGA, the
representation of individuals is different from each
other in the upper level and lower level. Therefore,
different genetic operators are applied at the upper
and lower level.
Representation. At the upper level the individuals
are represented by a single genetic code with the ve-
hicle number inserted into each gene and at the lower
level the customer number inserted into each gene.
Fitness Function. Evaluation of the individuals is
performed at only the lower layer, the evaluation func-
tion F is given by the follow;
F =
1
d
max
, (1)
where, d
max
is the maximum distance in all vehicles.
This equation means the minimize The maximum dis-
tance of each vehicle.
Crossover. At the upper level a general crossover
method which is used for the combinational optimiza-
tion such as an one-point crossover and an uniform
crossover is applied because the combination of the
customer to be allocated to each vehicle. On the other
hand, at the lower level, a crossover method which
is devised for route optimization problems such as
Partially Matched Crossover (PMX) (D.E.Goldberg,
1985), Cycle Crossover (CX) (I.M.Oliver, 1987) and
Order Crossover (OX) (Davis, 1985) is applied. In
this paper, an uniform crossover and PMX are applied
at the upper level and lower level respectively.
Mutation. A normal mutation and gene sequence
inversion are applied at the upper level and lower level
respectively.
HierarchicalOptimizationUsingHierarchicalMulti-competitiveGeneticAlgorithmanditsApplicationtoMultipleVehicle
RoutingProblem
271
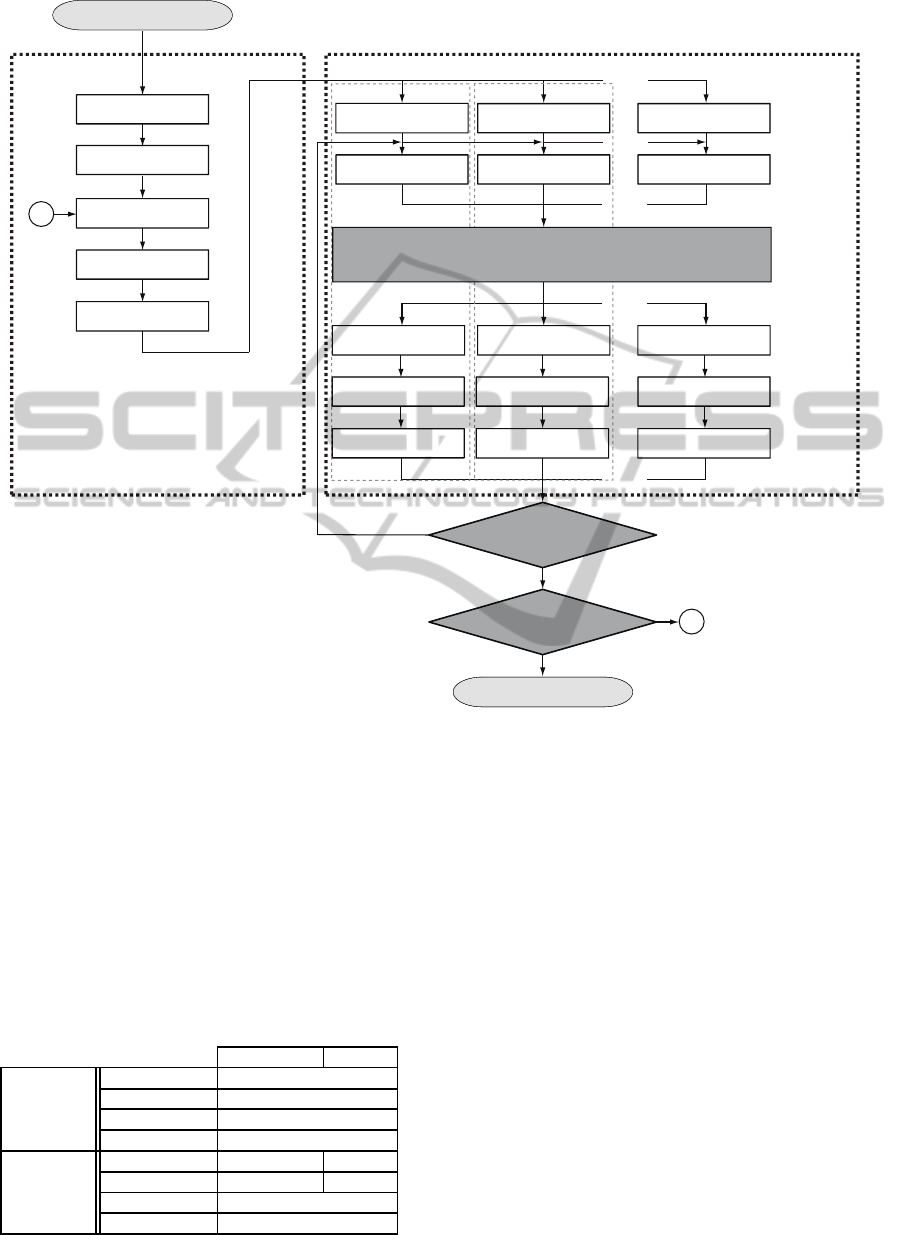
Start
Initialization
Evaluation
Crossover
Mutation
Termination
lower GA
End
Initialization
Evaluation
Selection
Crossover
Mutation
No
Yes
Initialization
Evaluation
Selection
Crossover
Mutation
Selection
Initialization
Evaluation
Selection
Crossover
Mutation
Termination
upper GA
Solution space 1 Solution space 2 Solution space S
Output the solutions at upper
1
Output the solutions at lower
No
Yes
if the restrictions are satisfied
Competition
&
Population size adjustment
1
Upper GA Lower GA
Figure 2: Flow of the hierarchical mcDGA.
6 SIMULATION AND RESULT
6.1 Simulation Setup
A computation experiment has been conducted to
compare with two-level GA and confirm the effi-
ciency of the proposed method. Table 1 shows the
parameter of two-level GA and mcDGA used in com-
Table 1: Parameter of two-level GA and mcDGA.
two-level GA mcDGA
Upper level Population size 10
Generation 30000
Crossover rate 0.8
Mutation rate 0.3
Lower level Population size 20, 50 adaptive
Generation 500, 1000 1000
Crossover rate 0.8
Mutation rate 0.1
putation experiment. These parameters were deter-
mined experimentally. In the two-level GA, popula-
tion size set to 20 and 50, and the termination in the
lower level set to 500 and 1000. i.e. we compared the
experiments of four values for this proposed method.
The number of customers set to 20. Parameter values
for the hierarchical mcDGA are defined as follows.
At the upper level, population size and terminate gen-
eration set to 10 and 30000 respectively. Crossover
rate and mutation rate set to 0.8 and 0.3 respectively.
At the lower level, initial population size set to 20
and 50 & terminate generation set to 500 and 1000.
Crossover rate and mutation rate set to 0.8 and 0.1
respectively. In the competition, the maximum eval-
uation value of the solution space is compared. The
migration is performed based on the update of the op-
timal solution and the generations. When the genera-
tion is more than 300 and the optimal solution of each
solution space is updated, the migration is performed.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
272
0
0.5
1
1.5
4300
4350
4400
4450
4500
Maximum distance in all vehicles
Calculation time
20
500
20
1000
50
500
50
1000
(Proposed)
Time [sec]
Distance
Population size
Number of generation
Variable
1000
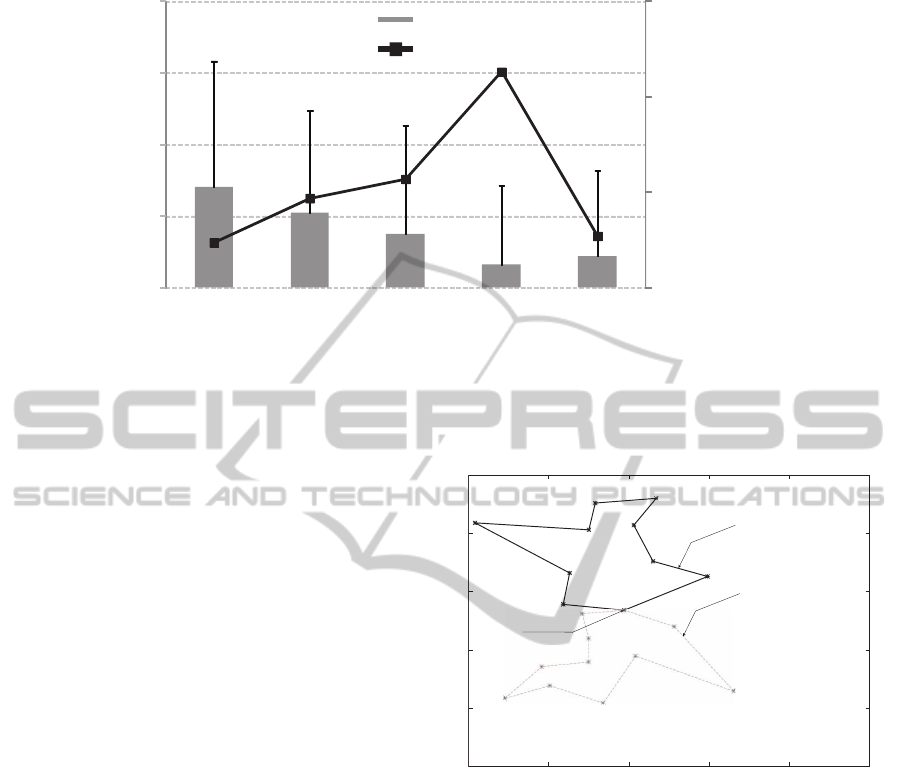
Figure 3: The result of simulation. The gray bar shows the maximum distance in all vehicles. The black dots show the
calculation time.
When the generation is 300 to 500, the population size
in the solution space of the upper half of the eval-
uation value is increased and the population size in
the solution space of the lower half of the evaluation
value is decreased, i.e. the solution space searched
got narrows to half. Then, minimum and maximum
population size of each solution spaces set to 0 and
30, respectively. When the generation is more than
500, the population size of the solution space which
is increased the highest evaluation value, and the pop-
ulation size of the other solution space is decreased.
Then, maximum population size of solution space set
to 50. Namely, the solution space to be searched is
narrowed to one. Then, minimum and maximum pop-
ulation size of each solution spaces set to 0 and 50
respectively.
6.2 Result and Discussion
The trial is performed 10 times. Figure 3 and Figure
4 show the result of the experiments.
In Figure 3, the bar graph shows the distribution
and the average of the maximum distance of the vehi-
cles , and line graph shows the calculation time which
is required for one generation respectively. From Fig-
ure 3, If population size and generation are set to
20 and 500 respectively then calculation time is very
short and stability of finding the solution is poor. On
the other hand, If population size and generation are
set to 50 and 1000 respectively, then calculation time
is very long and stability of finding the solution is
good. This proposed method is able to find the solu-
tion in short calculation time at the lower layer. Fig-
ure 4 is the best solution of the problem handled in
Vehicle 1
Vehicle 2
Depot
Figure 4: The best solution of this simulation. The black
stars and the light gray stars show the customer of vehicle 1
and vehicle 2 respectively. The black line and the light gray
line show the route of each vehicle.
this paper. The black stars and the light gray stars
show the customer of vehicle 1 and vehicle 2 respec-
tively. The black line and the light gray line show the
route of each vehicle. From this result, it is shown
that the probability of the discovery of the optimal so-
lution has improved by collecting the individual to the
solution space having high evaluation value. In other
word, the competition and the migration at the lower
level is effective in finding the optimal solution. Also
it is shown that the proposed method is able to reduce
the calculation time due to migration of individuals of
small evaluation value to search solution space. Fig-
ure 5 shows the image of competition and migration.
In Figure 5, the black and white ball show the win-
ner and loser solution space respectively at the lower
level. The number in each circle shows population
HierarchicalOptimizationUsingHierarchicalMulti-competitiveGeneticAlgorithmanditsApplicationtoMultipleVehicle
RoutingProblem
273

Generation
10005003000
Winner solution space
Loser solution space
(Search is aborted)
20
20
20
20
20
20
20
20
20
20
30
30
30
0
30
30
0
0
0
0
0
0
0
0
0
0
0
0
0
50
Figure 5: Image of the competition and the migration. The
black and white ball show the winner and loser solution
space at the lower level, respectively. The number in each
circle shows the population size of each solution space. The
number of balls is equal to the number of solution space to
be searched.
size of each solution space. Let t be a calculation
time per one generation. If population size and the
terminate generation are set to 20 and 1000 respec-
tively and the competition and the migration are not
performed then total calculation time T
u
will be cal-
culated as below.
T
u
= 20× 10 × 1000× t, (2)
= 2.0× 10
5
t. (3)
On the other hand, in the proposed method, the total
calculation time T
p
is given by follows.
T
p
= (20×10×300+30×5×200+50×1×500)t, (4)
= 1.15× 10
5
t. (5)
From the above equations, the calculation time can
be significantly reduced in the proposed method was
confirmed. From above results, it was shown that the
proposed method is able to find the solution in short
calculation time.
7 CONCLUSION
A new optimization method is proposed which is ef-
fective for hierarchical optimization problem also an
extension of the multiple-competitive distributed ge-
netic algorithm (mcDGA). This method consists of
two levels upper and lower. The solution space to be
searched is determined at the upper level, and the opti-
mum solution in a given solution space is determined
at the lower level. The migration of the individual and
competition is performed at the lower layer thereby
optimal solution can be found efficiently. We applied
the proposed hierarchical mcDGA to the mVRP to
confirm the effectiveness and this method has shown
good discovery accuracy and short computation time.
Although the experimental validation is limited in this
paper, it is not important for our study. Because we
are aim to construct a generic optimization technique
for any problem. In the future, we will not only con-
sider timing and rules of migration but also apply the
mcDGA for other problems, (e.g. traffic signal con-
trol, digital signal processing, image processing, etc).
REFERENCES
Bernard, D. G. and Hubert, R. J. (1959). The truck dispatch-
ing. Management Science, 6:80–91.
Davis, L. (1985). Applying adaptive algorithms to epistatic
domains. Proceeding of the International Joint Con-
ference on Artificial Intelligence, IEEE Computer So-
ciety Press, Los Angeles, pages 162–164.
D.E.Goldberg (1985). Alleles loci and the tsp. Proceedings
of the First International Conference on Genetic Al-
gorithms and Their Application, Lawrence Erolaum,
New Jersy, pages 154–159.
Flood, M. M. (1956). The traveling-salesman problem.
Oper. Res.
Holland, J. (1962). Outline for a logical theory of adaptive
systems. J. of the Association for Computing.
I.M.Oliver, D.J.Smith, J. H. (1987). Proceedings of the sec-
ond international conference , lawrence erolaum, new
jersy. A Study of Permutation Crossover Operator on
the TSP, pages 224–230.
Ishikawa, S., Misawa, H., Kubota, R., Tokiwa, T., Horio,
K., and Yamakawa, T. (2011). Multi-space competi-
tive dga for model selection and its application to lo-
calization of multiple signal sources. Journal of Ad-
vanced Computational Intelligence Intelligent Infor-
matics, 15(9):1320–1328.
Laporte, G. (1992). The vehicle routing problem: An
overview of exact and approximate algorithms. Eu-
ropean Journal of Operational Research, 4:61–75.
Nallusamy, R., Duraiswamy, K., Dhanalaksmi, R., and
Parthiban, P. (2009). Optimization of multiple vehicle
routing. International Journal of Engineering Science
and Technology, 1(3):129–135.
Potter, T. and Bossomaier, T. (1995). Solving vehicle rout-
ing problems with genetic algorithms. IEEE interna-
tional conference on evolutionary computing.
Sofge, D., Schultz, A., and Jong, K. D. (2002). Evolution-
ary computational approaches to solving the multiple
traveling salesman problem using a neighborhood at-
tractor schema. Lecture notes in computer science,
2279:51–60.
Tanese, R. (1989). Distributed genetic algorithm. Proc. of
the Int. Conf. on Genetic Algorithms, pages 434–439.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
274
