
Detection and Tracking of Dynamic Objects using
3D Laser Range Sensor on a Mobile Platform
Josip
´
Cesi
´
c, Ivan Markovi
´
c, Sre
´
cko Juri
´
c-Kavelj and Ivan Petrovi
´
c
University of Zagreb, Faculty of Electrical Engineering and Computing, Department of Control and Computer Engineering,
Unska 3, 10000 Zagreb, Croatia
Keywords:
Detection of Moving Objects, Tracking, Laser Range Sensor, JPDA Filter.
Abstract:
In this paper we present an algorithm for detection, extraction and tracking of moving objects using a 3D
laser range sensor. First, ground extraction is performed using random sample consensus for model parameter
estimation. Afterwards, to downsample the point cloud, a voxel grid filtering is executed and octree data
structure is used. This data structure enables an efficient detection of differences between two consecutive
point clouds, based on which clustering of dynamic parts of the cloud is performed. The obtained clusters are
then expanded over the set of static voxels in order to cover entire objects. In order to account for ego-motion
an iterative closest point registration technique with an initial transformation guess obtained by odometry of the
platform is used. As the final step, we present a tracking algorithm based on joint probabilistic data association
(JPDA) filter with variable process and measurement noise taking into account velocity and position of the
tracked objects. However, JPDA filter assumes a constant and known number of objects in the scene, and
therefore we use track management based on entropy. Experiments are performed using a setup consisting of
a Velodyne HDL-32E mounted on top of a mobile platform in order to verify the developed algorithms.
1 INTRODUCTION
A recent development of 3D lidar technology have
deepened challenges in the field of point cloud pro-
cessing. Many available publications present algo-
rithms that handle the task of detection and tracking
of moving objects (DATMO), simultaneous localiza-
tion and mapping (SLAM) and combination of the
two (Wang, 2004). Nowadays, there exists a wide va-
riety of approaches mostly depending on the assumed
environment (e.g. indoor, outdoor, on roads, cross-
country, airborne, underwater) and the expected ve-
locity of the platform with a mounted sensor. Fur-
thermore, ensuring real-time execution and high ef-
ficiency of such algorithms and methods, thus en-
abling potentially high velocities of platforms repre-
sents quite a challenging task.
In particular, dynamic scene analysis may be di-
vided into several steps. First, whilst a point cloud is
acquired, segmentation of a single scan which pro-
vides numerous objects in the scene presents a fo-
cus of the analysis. As a following task, it is nec-
essary to extract objects with dynamic characteris-
tics, where the detection serves as an input for the
tracking algorithm. Many previous works used 2D
lidar technology which provides smaller point clouds
containing a less eventful picture of the surrounding.
Even shortly after the appearance of 3D lidar sensors,
most of methods used projection of 3D point cloud
onto a single plane (2D approach) or extracting a few
slices from such a point cloud (2.5D approach). These
approaches were widely presented on 2007 DARPA
Urban Challenge (Darms et al., 2008; Montemerlo
et al., 2008; Navarro-Serment et al., 2010), com-
bined with different generative track management ap-
proaches (Petrovskaya and Thrun, 2009). So far, sev-
eral works have been processing point cloud in 3D
space without a projection of features so far, thus in
accordance to the goal of this research, related work
considered here relies on processing in 3D space.
Considering different approaches, it is relevant to dis-
tinguish ones designed exclusively with an assump-
tion on static position of the sensor (Shackleton et al.,
2010; Kaestner et al., 2010; Kaestner et al., 2012),
from ones that consider a moving sensor (Steinhauser
et al., 2008; Moosmann et al., 2009; Moosmann and
Fraichard, 2010; Azim and Aycard, 2012), which is
necessary presumption for its usage either on a vehi-
cle or a mobile robot.
One of a pioneer works with complete solution for
110
Ä ˛Eesi
´
c J., Markovi
´
c I., Juri
´
c-Kavelj S. and Petrovi
´
c I..
Detection and Tracking of Dynamic Objects using 3D Laser Range Sensor on a Mobile Platform.
DOI: 10.5220/0005057601100119
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 110-119
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the DATMO problem, assuming static position of the
sensor, is the work presented in (Shackleton et al.,
2010). It uses a typical pipeline as a solution to the
DATMO problem. By way of segmentation, classi-
fication and tracking this work has provided contri-
bution in nullifying influence of shadows which are
mostly showing up in the background of the scene.
Furthermore, the solution ensures fine-grained seg-
mentation when multiple tracked objects, in particu-
lar people, are close together. Apart from majority of
works, the approach based on a stochastic Bayesian
environment learning presented in (Kaestner et al.,
2010) demands only a few experimentally tuned pa-
rameters. It utilizes Gaussian mixture models in order
to learn 3D representations of dynamic environments
where the continuous polar space around the sensor
is discretized into evenly spaced range image cells in
immediate encirclement of the sensor. The main ob-
jective was to determine if a measurement is caused
by static or dynamic objects. This work served as a
framework for classification and generative tracking
approach presented in (Kaestner et al., 2012).
The work presented in (Steinhauser et al., 2008)
does not provide a direct solution to the DATMO
problem, it indirectly detects dynamic objects in the
point cloud in order to estimate its ego motion based
on provided information. In principle, it distinguishes
static and dynamic objects while ego motion estima-
tion procedure takes into account only static ones.
For this purpose, after feature points and correspon-
dences are established, random sample consensus
(RANSAC) algorithm is used to classify points as
static or dynamic. At the end, rotation and trans-
lation parameters are estimated. The full solution
to a DATMO problem for moving platforms is pre-
sented in (Moosmann et al., 2009) and (Moosmann
and Fraichard, 2010). A segmentation procedure pre-
sented in (Moosmann et al., 2009) is based on local
surface geometry. Moreover, it relies upon the ob-
servation that many object parts have convex outline
and that a vertical structure usually represents a sin-
gle object. Given the segments within the static scene,
the motion detection is achieved using a combina-
tion of local surface based feature matching and it-
erative closest point (ICP) algorithm (Moosmann and
Fraichard, 2010), while object motion is thus esti-
mated using Kalman filtering and dynamic mapping.
Another dynamic object detection approach relies on
utilization of a map of the environment (Azim and
Aycard, 2012). Such an approach has high memory
and processing requirements, but has the advantage
of a known environment thus avoiding segmentation
of the entire static scene.
Previous discussion has brought a short overview
of moving objects detection approaches, which gen-
erally serve as an input for the tracking task. Given
a good detection, tracking becomes the problem of
data association and state estimation. The state esti-
mation techniques rely on methods operating within
Bayesian framework, based on different aspects of
Kalman filtering, grid-based approaches and approx-
imations using particle methods (Arulampalam et al.,
2002; Miller et al., 2011). Data association tech-
niques are as well selected from a wide range of meth-
ods, some of which are optimal (e.g. multiple hypoth-
esis tracker (MHT) (Reid, 1979)), suboptimal (e.g.
probabilistic data association (PDA), joint probabilis-
tic data association (JPDA) (Bar-Shalom, 1974)) or
naive (e.g. global nearest neighbour (GNN) (Azim
and Aycard, 2012)). An alternative approach to tra-
ditional multi-target tracking approaches based on a
probability hypothesis density (PHD) filter where an
analytical solution based on Gaussian mixtures has
been presented in (Vo and Ma, 2006). This filter
inherently avoids the explicit associations between
measurements and targets, since it produces the mix-
ture of probability density functions on the common
state space, but it originally does not solve the prob-
lem of track extraction through time.
State-of-the-art in the field of detection can be
found in review papers (Mertz et al., 2013) and (Mor-
ton et al., 2011), while detailed overview of proba-
bilistic data association techniques is given in (Cox,
1993).
In this paper we propose a method for dynamic
object detection and tracking with a 3D laser range
sensor. This approach relies on the processing of two
consecutive point clouds and does not use any addi-
tional sensor systems for localization apart from low
cost odometry. The experiment proves the suitabil-
ity of the proposed method for tasks where moderate
motion of mobile platform can be assumed. We also
extend the entropy based track management based
on JPDA filter (Juri
´
c-Kavelj et al., 2008) such that
it takes the variable uncertainties over time into ac-
count. The uncertainties are manifested via variable
process and measurement noise regarding the velocity
and position of the tracked objects as well as inherent
characteristics of the used sensor system.
The paper is organized as follows. The algorithm
for dynamic objects extraction is given in Section 2.
Section 3 presents the tracking approach based on
data association using the JPDA technique, filtering
based on Kalman filter and an entropy based track
management. The experimental results are presented
in Section 4. Section 5 concludes the paper and pro-
vides perspectives for future work.
DetectionandTrackingofDynamicObjectsusing3DLaserRangeSensoronaMobilePlatform
111
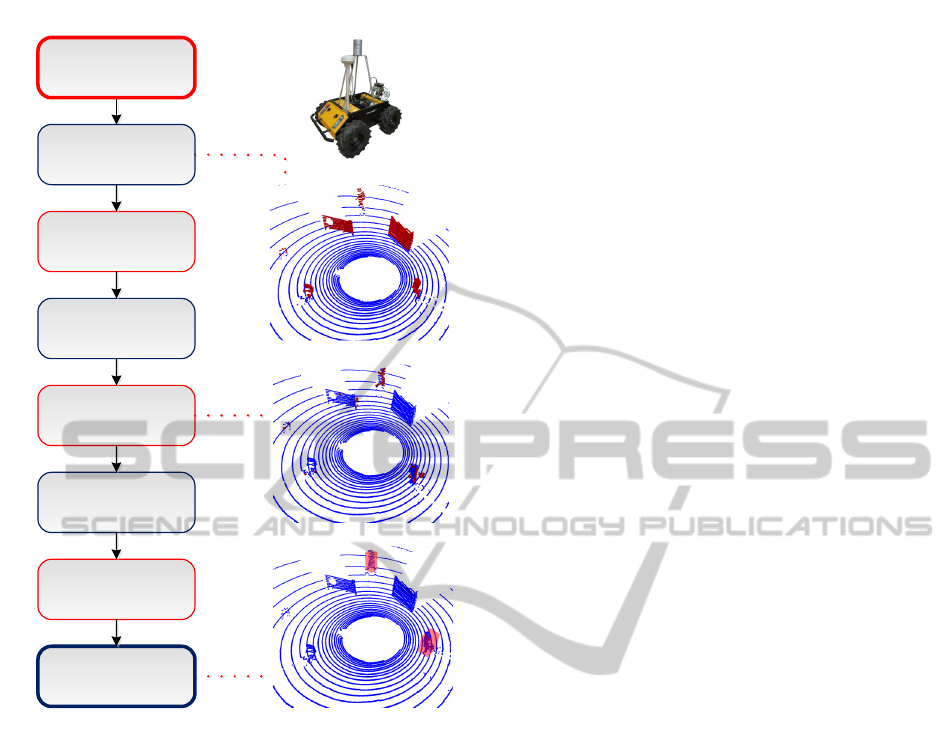
Point Cloud
Acquisition
Ground
Extraction
Downsampling
Transformation
Dynamic Voxels
Detection
Dynamic Voxels
Clustering
Dynamic Clusters
Expansion
Dynamic Objects
Figure 1: Flow chart of the dynamic object detection algo-
rithm and the results of the detection.
2 DYNAMIC OBJECT
DETECTION
Static scene segmentation is a fundamental step
within a dynamic object detection pipeline, where
both extraction of static and dynamic objects is
achieved. Afterwards, the main idea is to associate
detected objects between two consecutive scans, af-
ter which objects’ dynamics can be investigated. In
accordance to this remark, the pipeline for dynamic
objects extraction task proposed herein is mostly ori-
ented towards exclusive detection of dynamic objects
without a known map, thus influencing the complex-
ity of track management as well as memory and pro-
cessing requirements. A flow chart of the algorithm is
presented in Fig. 1.
As a first step in the pipeline, ground extraction
is executed. For this purpose the RANSAC method
(Fischler and Bolles, 1981) was used. The goal of
this robust iterative method is to estimate parameters
of the plane that fits the given point cloud best. The al-
gorithm manifests its high accuracy executed on noisy
measurements common for outdoor environments as
well. An eventual disadvantage of this method is its
non-deterministic processing time, hence the number
of iterations is limited within the application.
The ground extraction task is the only task in the
pipeline which handles the entire cloud. To ensure
faster execution of the algorithm, the non-ground part
of the cloud is downsampled using voxel grid filtering
and hierarchical octree data structure (Meagher, 1982;
Wilhelms and Gelder, 2000). This filtering models
occupancy of a cube with a point placed in its center
if any points are located within the considered space.
Octree data structure is chosen due to its proven effi-
ciency for comparison and detection change between
two consecutive point clouds (Wilhelms and Gelder,
2000).
After providing reduced, i.e. newly generated
point cloud consisting of objects regardless to the
ground, it is necessary to detect the dynamic ones.
To extract entire objects we need to detect charac-
ter of each voxel. Let S
t−1
and S
t
be the state of
the voxel V in the previous scan and the current
scan, respectively. Let us assume that each voxel
can be modelled as free, occupied or unobserved. A
voxel V is declared dynamic if it changes its state
either from S
t−1
= f ree into S
t
= occupied or from
S
t−1
= unobserved into S
t
= occupied. The former
state change from free to occupied can clearly be de-
clared as dynamic, while reasoning on the latter relies
on the following. While moving, a mobile robot or a
vehicle discovers a wide area of possibly unobserved
environment in each scan. To ensure eventual security
requirements and enable object detection after just a
single scan, while still avoiding mapping of the envi-
ronment, the considered change in the state of a voxel
is rather modelled as dynamic. This can be consid-
ered as conservative approach since any new object,
observed for the first time, might be detected as dy-
namic.
In order to enable comparison of consecutive point
clouds while mobile platform is moving, transforma-
tion of clouds into a common frame represents a vital
step. In contrary to some more complex but accurate
localization sensing systems, such as combination of
global positioning system (GPS), wheel speed sen-
sors and inertial measurement units (IMU) (Azim and
Aycard, 2012), in this work we use well established
registration technique instead, i.e. iterative closest
point algorithm (ICP), originally derived in (Besl and
McKay, 1992). As an optimization problem, ICP
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
112

needs a variable amount of time until it converges.
Thus, encoders as a single sensing system were used
to get the initial guess for the registration algorithm
to provide faster and more accurate convergence. It
is assumed that there are enough correspondences
within two consecutive scans, otherwise the conver-
gence of the approach would be questionable. Again,
due to its non-deterministic processing time, the num-
ber of iterations of ICP is bounded. An improvement
on the accuracy of the transformation could have been
achieved by using some more advanced estimation
techniques, by extending the DATMO task with some
additional applications (e.g. SLAM (Wang, 2004)) or
simply by utilizing some additional sensing systems
and eventually fusing the data.
Once the voxels with dynamic character are de-
tected, a clustering over this set is executed. The clus-
tering algorithm passes through the list of dynamic
voxels defined by their center and clusters ones placed
within a pre-given maximal allowed Euclidean dis-
tance with respect to considered point. Any point
is allowed to be a seed point from which the cluster
broadens. Previous procedure executes range search
frequently, therefore an efficient kd-tree data structure
is used. Since some noisy measurements appear as
well, the limitation on the size of the cluster is set.
Very small clusters could be caused by small dynamic
objects, wrong dynamic detection of static objects or
noisy measurements. All these possibilities are fil-
tered out using such constraint, while utilization of
complex algorithms to discard noisy measurements is
avoided. In order to better handle big or slow objects
whose shift between two consecutive scans does not
go beyond the size of the object, since the map of the
environment is not used, the need for broadening the
obtained dynamic clusters with static occupied vox-
els appears. After the expansion step, some simple
heuristics is applied in order to discard detections that
could unlikely correspond to objects of interest (e.g.
for an outdoor scene, if a height of detected cluster
goes beyond some value, it likely does not correspond
to neither person, nor cyclist). Examples of the detec-
tion procedure for an indoor and an outdoor scene are
shown in Fig. 2 and Fig. 3, respectively.
The left figure in Fig. 2 shows the point cloud
gathered at the faculty lobby with multiple moving
persons. Figure in the middle shows the result of the
ground extraction (blue) and dynamic clusters after
expansion step (red). Right figure presents the result
of dynamic objects detection after applying threshold
conditions on dynamic clusters, where multiple cor-
rect detections as well as one false alarm placed on
top of the figure have appeared.
The left figure in Fig. 3 shows the point cloud
gathered at the faculty courtyard with multiple mov-
ing objects. Figure in the middle shows the result
of the ground extraction (blue) and dynamic clus-
ters after expansion step (red). Right figure presents
the result of dynamic objects detection after applying
threshold conditions on dynamic clusters, where two
cyclists and one moving pedestrian have appeared.
Since no map of the environment is built, some
false alarms might appear as a drawback, especially if
the sensor is placed on a fast platform or a car. On the
other hand, the memory and processing requirements
are kept quite low. Still, even some false positives
appear, they can be filtered out using convenient data
association approach. Therefore, a generic tracking
management is presented in the following section.
3 DYNAMIC OBJECT TRACKING
After providing positions of the objects using previ-
ously presented algorithm, tracking task stands as the
second major part within the DATMO problem solu-
tion. Herein the tracking task is divided into three
parts: data association, filtering and generative track
management. As stated in the introductory section,
we use the JPDA filter with Kalman filtering and en-
tropy based track management.
3.1 Data Association
Consider the following sets
X
k
= { ˆx
k
1
, ˆx
k
2
, ..., ˆx
k
T
k
},
Z
k
= {z
k
1
, z
k
2
, ..., z
k
m
k
},
Z
k
= {Z
1
, Z
2
, ..., Z
k
},
(1)
where set X
k
is a set of continuous random variables
that represent initialized tracks at time k with T
k
de-
noting the number of tracks. The set Z
k
represents
measurements, i.e. detections of dynamic objects at
time k with m
k
being a total number of detected ob-
jects within a particular scan. The last given set Z
k
contains all measurements received until and includ-
ing moment k.
Let Θ
k−1
denote a set of hypotheses about mea-
surement to track assignment at time k − 1 and Θ
k−1
p(h)
denote a specific hypothesis at the time. Consider-
ing a specific hypothesis and set of measurements
Z
k
, we can construct legal assignment θ
h
(k). The
resulting hypothesis at time k is denoted as Θ
k
h
=
{Θ
k−1
p(h)
, θ
h
(k)}. The JPDA filter can be viewed as a
special case of MHT where in each iteration all con-
sidered hypotheses are reduced to a single hypothesis
DetectionandTrackingofDynamicObjectsusing3DLaserRangeSensoronaMobilePlatform
113
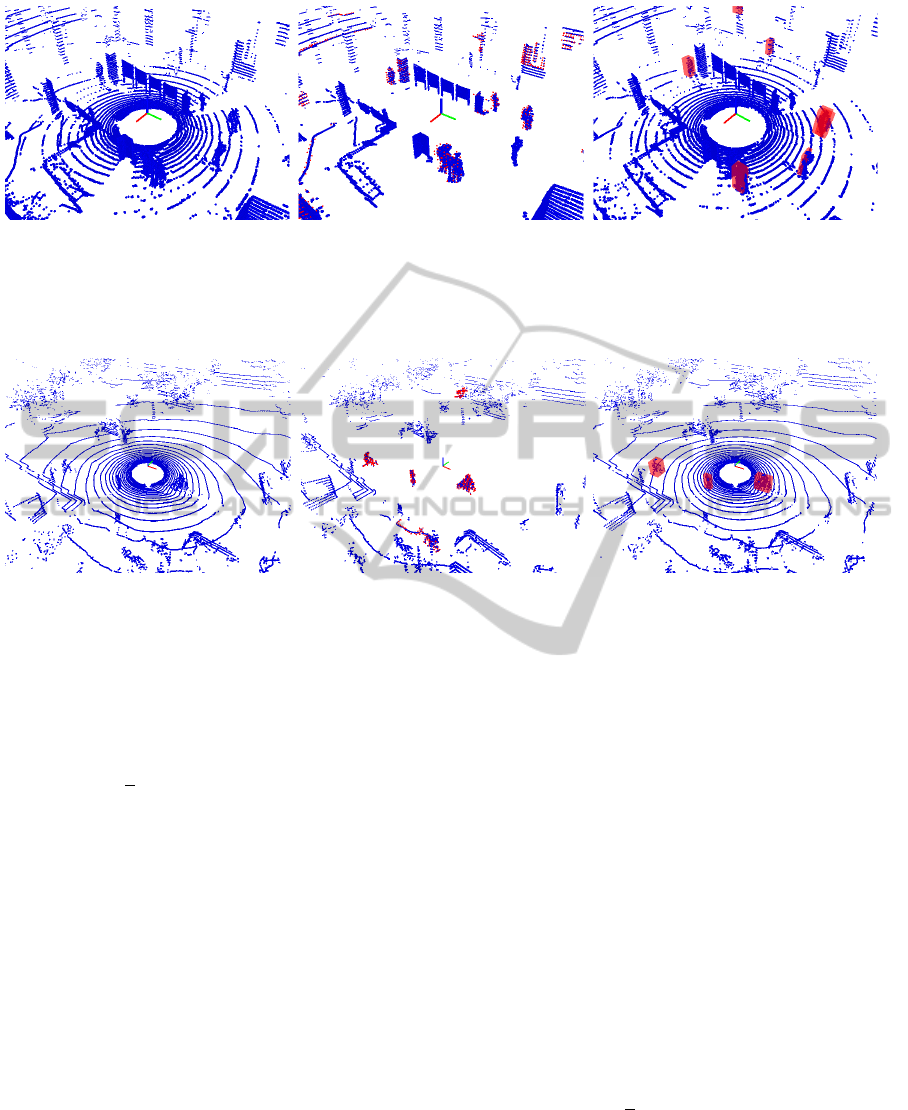
Figure 2: The result of dynamic objects detection procedure for an indoor scene. The left figure shows the point cloud
gathered at the faculty lobby with multiple moving persons. Figure in the middle shows the result of the ground extraction
(blue) and dynamic clusters after expansion step (red). Right figure presents the result of dynamic objects detection after
applying threshold conditions on dynamic clusters, where multiple correct detections as well as one false alarm placed in top
of the figure have appeared. The red markers representing the objects are put over the original point cloud for the clarity.
Figure 3: The result of dynamic objects detection procedure for an outdoor scene. The left figure shows the point cloud
gathered at the faculty courtyard with multiple moving objects. Figure in the middle shows the result of the ground extraction
(blue) and dynamic clusters after expansion step (red). Right figure presents the result of dynamic objects detection after
applying threshold conditions on dynamic clusters, where two cyclists and one moving pedestrian have appeared. The red
markers representing the objects are put over the original point cloud for the clarity.
θ(k). Thus, a probability for such an assignment de-
termined by particular hypothesis reduces to
P(Θ
k
h
|Z
k
) =
1
c
· P(Z
k
|θ
h
(k), θ(k − 1), Z
k−1
)
· P(θ
h
(k)|θ(k − 1), Z
k−1
)
· P(θ(k − 1)|Z
k−1
),
(2)
where c is a normalizing constant. The probability
of the last term in (2), i.e. P(θ(k − 1)|Z
k−1
), equals
to unity since θ(k − 1) is the only hypothesis left af-
ter the measurements processing. The second term
P(θ
h
(k)|θ(k −1), Z
k−1
) can be modelled as a constant
(Schulz et al., 2003). Therefore, we need to develop
only the first term
P(Z
k
|θ
h
(k), θ(k − 1), Z
k−1
) = P(Z
k
|θ
h
(k))
=
m
k
∏
j=1
P(z
k
j
|θ
h
(k)),
(3)
where P(z
k
j
|θ
h
(k)) depends on the measurement-to-
track association made by hypothesis θ
h
(k)
P(z
k
j
|θ
h
(k)) =
(
P
F
, z
k
j
false alarm
P
D
P(z
k
j
|
ˆ
x
k
t
), z
k
j
existing track
(4)
where P
F
and P
D
are the probabilities of a false alarm
and detection, respectively.
Due to the presented character of JPDA filter,
namely the fact that hypotheses tree is reduced to a
single branch θ(k), the association probabilities are
given as follows
β
t
j
=
∑
θ∈Θ
k
jt
P(θ|Z
k
), (5)
where Θ
k
jt
denotes all the hypotheses that associate
measurement j with track t at time k.
By inserting (3) into (2) and then inserting result
into (5), we get an expression for measurement-to-
track association probabilities
β
t
j
=
1
c
∑
θ∈Θ
k
jt
m
k
∏
j=1
P(z
j
|θ). (6)
These association probabilities are used to update the
track states with all the measurements from the clus-
ter, while after the update only one hypothesis re-
mains - the one with the current track states.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
114

3.2 Kalman JPDA Filter
Herein we use a quite general constant velocity model
for motion estimation in horizontal plane. State is de-
scribed by position (x,y) and velocity ( ˙x, ˙y) in 2D, as
x = [x ˙x y ˙y]
T
. The model itself is given by
x
k+1
= Fx
k
+ Gw
k
=
1 ∆T
k
0 0
0 1 0 0
0 0 1 ∆T
k
0 0 0 1
x
k
+
∆T
2
k
2
0
∆T
k
0
0
∆T
2
k
2
0 ∆T
k
w
k
,
(7)
where w
k
is the process noise and ∆T
k
is the update in-
terval. Prediction is calculated using standard Kalman
filter equations
ˆ
x
k−
t
= F
ˆ
x
k−1
t
,
P
k−
t
= FP
k−1
t
F
T
+ GQ
k
t
G
T
,
(8)
where Q
k
t
is the process noise covariance matrix.
Due to the inherent character of the sensing system,
the acquisition of a point cloud can not be executed
instantly. Therefore, while tracked object is being
scanned (at 10 Hz rate), it moves as well (more tech-
nical details follow in the next section). This effect
is especially noticeable while fast objects pass close
to the lidar, placed on a mobile platform, and causes
errors in the position of detected object. One way to
handle the problem would be taking it into account
within the detection procedure, but it might require
complex transformations of a point cloud. On the
other hand, it can be built-in in the process noise
weighted in the direction of the object’s movement.
In the model given by (7), noise is modelled as ac-
celeration of the track. A convenient way to model
maximal acceleration a
max
is given with a
max
=
v
2
max
r
min
,
where v
max
stands for a maximal anticipated veloc-
ity and r
min
stands for minimal distance between the
object and the lidar. The previous observation can be
considered as process noise included into acceleration
weighted in the predicted direction proportionally to
the predicted velocity.
The innovation vector ν
t
j
and its covariance are S
t
ν
t
j
= x
j
− H
ˆ
x
k−
t
,
S
t
= HP
k−
t
H
T
+ R,
(9)
where H is the output matrix and R is the measure-
ment noise covariance matrix. Since majority of lidar
systems scan the environment in a way that laser rays
drift radially from each other, objects scanned fur-
ther from it have sparser point cloud representation.
Due to this effect, in accordance to the expected dis-
tance of the observed object, it is necessary to adapt
maximal allowed distance between two neighbouring
points to be clustered. Thus, the uncertainty of the
position of detected object grows with its distance.
Therefore, we model linear relation between measure-
ment standard deviation and predicted distance of the
observed object.
In order to lower the processing requirements we
have utilized a measurement gating. In particular,
since the innovation term ν
t
j
S
−1
t
ν
t
j
has χ
2
distribu-
tion by using tables we can select upper limit which
includes valid measurements with, e.g. 99% proba-
bility.
The update step is done using weighted innovation
ν
t
and standard Kalman gain K
k
as
ν
t
=
m
k
∑
j=1
β
t
j
ν
t
j
,
ˆ
x
k
t
=
ˆ
x
k−
t
+ K
k
ν
t
K
k
= P
k−
t
H
T
S
−1
t
.
(10)
while the covariance update is calculated as in (Black-
man and Popoli, 1999)
P
k
t
= β
t
P
k−
t
+ (1 − β
t
)[I −P
k
H]P
k−
t
+ K
k
P
ν
t
K
T
k
,
(11)
where
β
t
= 1 −
m
k
∑
j=1
β
t
j
,
P
ν
t
=
m
k
∑
j=1
β
t
j
ν
t
j
(ν
t
j
)
T
− ν
t
(ν
t
)
T
.
(12)
3.3 Track Management
Due to an inherent characteristic of JPDA filter which
assumes known and constant number of tracked ob-
jects, it is necessary to design generative track man-
agement which handles the number of objects in the
scene. A solution for Kalman filter, described in
(Blackman and Popoli, 1999), is based on logarith-
mic hypothesis ratio and innovation matrix. Another
approach, presented in (Schulz et al., 2003), proposes
usage of a Bayesian estimator of the number of ob-
jects for an LRS.
In the work (Juri
´
c-Kavelj et al., 2011), an ap-
proach based on entropy measure as a feature in track
management was used. It gives a basis for track man-
agement that can be readily utilized independently
of the filtering approach, where all the information
required for the entropy calculation are available in
the running filter and the sensor model. A practical
DetectionandTrackingofDynamicObjectsusing3DLaserRangeSensoronaMobilePlatform
115

measure for this task is the quadratic Rényi entropy
(Rényi, 2007)
H
2
(
ˆ
x
t
) = −log
Z
p(
ˆ
x
t
)
2
d
ˆ
x
t
. (13)
In the case of Gaussian distribution an analytical so-
lution is given by
H
2
(
ˆ
x
t
) =
n
2
log4π +
1
2
log|P
t
|,
(14)
where n is the state dimension, P
t
is the covariance
matrix (|P
t
| =
∏
n
i=1
λ
i
, where λ
i
is P
t
’s i-th eigen-
value). Although the Shannon entropy can also be
calculated in closed form for the Gaussian distribu-
tion, the Rényi entropy was chosen in (Juri
´
c-Kavelj
et al., 2011) since it enabled closed form for the case
of the particle filter approximated with a mixture of
Gaussian distributions.
As discussed in previous subsection, the process
noise depends on the velocity of the moving object,
having the highest value in the direction of move-
ment. Since this observation influences entropy, it is
needed to tolerate higher uncertainty in the direction
of movement to keep a track alive. For this purpose,
we propose an approach which includes a modifica-
tion of eigenvalues for the calculation of entropy. The
modified eigenvalues λ
i,mod
are calculated as follows
λ
i,mod
= λ
i
[α +(1 − α)
1 −||Pro j(l
i,v
, v)||
||l
i,v
||
||v||
v
max
],
(15)
where v is the estimated velocity (v =
ˆ
x
t
◦ [0 1 0 1]; ◦
stands for element-wise product), l
i,v
is a vector con-
sisting of components of i-th eigenvector l
i
of P
t
re-
lated to velocity (l
i,v
= l
i
◦ [0101]) and α ∈ [0, 1] is a
constant. Pro j(a, b) is projection of vector a onto b.
A term for modified entropy calculation is
H
2,mod
(
ˆ
x
t
) =
n
2
log4π +
1
2
log
n
∏
i=1
λ
i,mod
.
(16)
From (14), (15) and (16), as long as ||v|| < v
max
, it fol-
lows that H
2,mod
< H
2
. By (15), we lower i-th eigen-
value which corresponds to i-th eigenvector propor-
tionally with the length of projection of i-th eigenvec-
tor onto velocity of the tracked object. This way we
want to tolerate uncertainty in the movement direc-
tion. This reasoning follows from the discussion re-
lated to the process noise, where even aware of higher
uncertainty in track state we still want to keep track
alive. In contrary, some faster dynamic objects might
lose their track.
The threshold setting suits the track management
logic as follows. When the track is initialized it is con-
sidered as tentative and the initial entropy is stored.
When the entropy of the tentative track drops un-
der confirmation threshold, considered track is con-
firmed. Afterwards, once the entropy gets over dele-
tion threshold, the track is deleted. Furthermore, no
entropy should be greater than the one calculated at
the point of the track initialization.
4 EXPERIMENTAL RESULTS
To evaluate the proposed algorithms an experimental
setup consisting of a Velodyne HDL-32E High Defi-
nition Lidar mounted on top of a Husky A200 mobile
platform was used. The lidar sensor used herein has
32 lasers across 40
◦
vertical and 360
◦
horizontal field
of view. The lasers are aligned vertically from −30
◦
to 10
◦
. It generates approximately 700, 000 points
per second with a range of 70 m. It rotates at a rate
of 10 Hz thus producing approximately 70, 000 points
per turn.
In order to show the efficiency and usefulness of
the proposed methods, the experiments were carried
out in two different scenarios. First experiment was
performed in a complex indoor environment, whilst
another experiment was carried out in a complex out-
door scene.
Indoor scene. The experiment was performed
having several persons walking in the surrounding of
a mobile robot. The results of the detection task for
this scenario are presented in Fig. 2. The results of
the tracking task for the outdoor scene are shown in
Fig. 4. Left figure shows the trajectories and starting
points of the moving objects (two green lines, two ma-
genta lines and two blue lines correspond to six per-
sons starting at the positions of squares, while black
line corresponds to a wrong track confirmation), the
mobile platform (red line starting at the position of
the circle) and several tentative filters caused by false
alarms (pluses). Upper-right and bottom-right figures
respectively show velocities and entropies of the mov-
ing objects, the mobile platform as well as several
tentative filters (pluses) that were not confirmed as
tracks.
Outdoor scene. Alongside with several walk-
ing persons, two cyclists have also appeared in the
second experiment. The results of the detection task
for this scenario are presented in Fig. 3. The results
of the tracking task for the outdoor scene are shown in
Fig. 5. Left figure shows the trajectories and starting
points of the moving objects (magenta and green line
correspond to two cyclists, while black, yellow and
blue present three pedestrians starting at the positions
of squares) and the mobile platform (red line starting
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
116
−10 −5 0 5
−20
−15
−10
−5
0
5
10
15
x [m]
y [m]
0 2 4 6 8 10 12 14 16 18
0
0.5
1
1.5
2
t [s]
v [m/s]
0 2 4 6 8 10 12 14 16 18
−3
−2
−1
0
1
2
t [s]
entropy
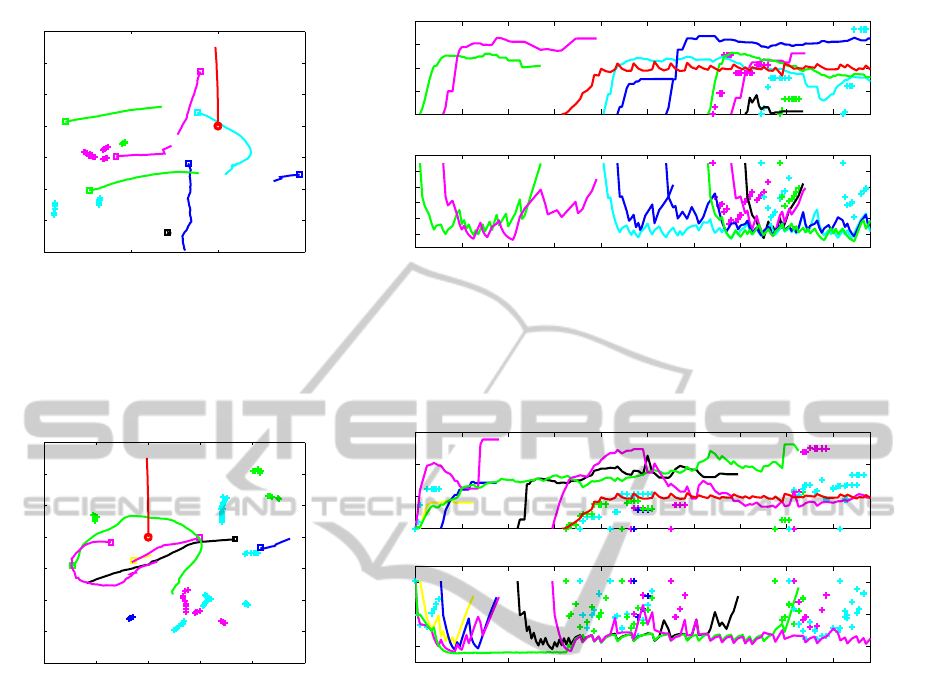
Figure 4: The experimental results of DATMO procedure for a complex indoor scene. Left figure shows the trajectories
and starting points of the moving objects (two green lines, two magenta lines and two blue lines correspond to six persons
starting at the positions of squares, while black line corresponds to a wrong track confirmation), the mobile platform (red line
starting at the position of the circle) and several tentative filters caused by false alarms (pluses). Upper-right and bottom-right
figures respectively show velocities and entropies of the moving objects, the mobile platform as well as several tentative filters
(pluses) that were not confirmed as tracks.
−10 −5 0 5 10 15
−20
−15
−10
−5
0
5
10
15
x [m]
y [m]
0 2 4 6 8 10 12 14 16 18
0
1
2
3
t [s]
v [m/s]
0 2 4 6 8 10 12 14 16 18
−2
0
2
t [s]
entropy
Figure 5: The experimental results of DATMO procedure for a complex outdoor scene. Left figure shows the trajectories and
starting points of the moving objects (magenta and green line correspond to two cyclists, while black, yellow and blue present
three pedestrians starting at the positions of squares) and the mobile platform (red line starting at the position of the circle)
and several tentative filters caused by false alarms (pluses). Upper-right and bottom-right figures respectively show velocities
and entropies of the moving objects, the mobile platform as well as several tentative filters (pluses) that were not confirmed
as tracks.
at the position of the circle) and several tentative fil-
ters caused by false alarms (pluses). Upper-right and
bottom-right figures respectively show velocities and
entropies of the moving objects, the mobile platform
as well as several tentative filters (pluses) that were
not confirmed as tracks. Due to physical constraint of
the lidar, the magenta cyclist was not detected in the
proximity of the sensor, hence its track was divided
into two segments.
In this experiment, with approximately 200 pro-
cessed clouds for both scenarios, several walking
pedestrians and two cyclists were correctly tracked al-
though many objects (both static and dynamic) were
present. Pluses on both Figs. 4 and 5 correspond
to tentative filters caused by false alarms appearing
mostly due to strong vibrations of the platform, but
only one such track was confirmed. It is also suitable
to note that none of the dynamic objects has passed
obscured. Since we had none database with known
ground truth available, the comparison of the ground
truth data with the results of our DATMO approach
has not been provided. Nevertheless, presenting these
two experiments, the method is clearly suitable for
performing detection and tracking task efficiently and
reliably when moderate motion of a mobile platform
can be assumed.
The experiments were performed on a machine
running at 2.4 GHz and the algorithm was executing
at 5 Hz. The data were collected and processed using
the Robot Operating System (ROS) (Quigley et al.,
2009) and Point Cloud Library (PCL) (Rusu, 2014).
DetectionandTrackingofDynamicObjectsusing3DLaserRangeSensoronaMobilePlatform
117

5 CONCLUSION
In this paper we have addressed the DATMO prob-
lem using a 3D laser range sensor on a vehicle. The
proposed detection pipeline consists of ground ex-
traction, downsampling of the point cloud and the
detection of dynamic parts of space, namely voxels.
The dynamic voxels detection is executed by com-
parison of two consecutive point clouds based on the
ICP algorithm with an initial transformation guess ob-
tained by odometry, after which the clustering was
performed. The tracking task used JPDA filter and
Kalman filtering. The algorithm also uses the modi-
fied track management to enable variable number of
tracked objects. Within proposed tracking approach
an adaptive process and measurement noise, that in-
herently take into account characteristics of used sen-
sor as well as track state, are modelled. The re-
sults have conformed that the presented algorithms
can successfully perform the detection and tracking
of moving objects.
ACKNOWLEDGEMENTS
This work has been supported by research project
VISTA (EuropeAid/131920/M/ACT/HR) and Euro-
pean Community’s Seventh Framework Programme
under grant agreement no. 285939 (ACROSS).
REFERENCES
Arulampalam, M., Maskell, S., Gordon, N., and Clapp,
T. (2002). A tutorial on particle filters for on-
line nonlinear/non-gaussian bayesian tracking. Signal
Processing, IEEE Transactions on, 50(2):174–188.
Azim, A. and Aycard, O. (2012). Detection, classifica-
tion and tracking of moving objects in a 3d environ-
ment. In Intelligent Vehicles Symposium, pages 802–
807. IEEE.
Bar-Shalom, Y. (1974). Extension of the probabilistic data
association filter to multitarget environment. Proc.
Fifth Symp. on Nonlinear Estimation.
Besl, P. J. and McKay, N. D. (1992). A method for registra-
tion of 3-d shapes. IEEE Trans. Pattern Anal. Mach.
Intell., 14(2):239–256.
Blackman, S. and Popoli, R. (1999). Design and Analy-
sis of Modern Tracking Systems. Artech House Radar
Library. Artech House.
Cox, I. J. (1993). A review of statistical data association
techniques for motion correspondence. International
Journal of Computer Vision, 10:53–66.
Darms, M., Rybski, P., and Urmson, C. (2008). Classi-
fication and tracking of dynamic objects with multi-
ple sensors for autonomous driving in urban environ-
ments. In Intelligent Vehicles Symposium, 2008 IEEE,
pages 1197–1202.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Juri
´
c-Kavelj, S., Ðakulovi
´
c, M., and Petrovi
´
c, I. (2008).
Tracking multiple moving objects using adaptive
sample-based joint probabilistic data association fil-
ter. In Proceedings of 5th International Confer-
ence on Computational Intelligence, Robotics and Au-
tonomous Systems (CIRAS 2008), pages 93–98.
Juri
´
c-Kavelj, S., Markovi
´
c, I., and Petrovi
´
c, I. (2011). Peo-
ple tracking with heterogeneous sensors using jpdaf
with entropy based track management. In Proceedings
of the 5th European Conference on Mobile Robots
(ECMR2011), pages 31–36.
Kaestner, R., Engelhard, N., Triebel, R., and Siegwart, R.
(2010). A bayesian approach to learning 3d represen-
tations of dynamic environments. In Proceedings of
The 12th International Symposium on Experimental
Robotics (ISER), Berlin. Springer Press.
Kaestner, R., Maye, J., and Siegwart, R. (2012). Generative
object detection and tracking in 3d range data. In Proc.
of the IEEE International Conference on Robotics and
Automation (ICRA).
Meagher, D. (1982). Geometric modeling using octree en-
coding. Computer Graphics and Image Processing,
19(2):129–147.
Mertz, C., Navarro-Serment, L. E., and MacLachlan (2013).
Moving object detection with laser scanners. Journal
of Field Robotics, 30(1):17–43.
Miller, I., Campbell, M., and Huttenlocher, D. (2011). Effi-
cient unbiased tracking of multiple dynamic obstacles
under large viewpoint changes. Trans. Rob., 27(1):29–
46.
Montemerlo, M., Becker, J., Bhat, S., and Dahlkamp, H.
(2008). Junior: The stanford entry in the urban chal-
lenge. J. Field Robot., 25(9):569–597.
Moosmann, F. and Fraichard, T. (2010). Motion estima-
tion from range images in dynamic outdoor scenes. In
Robotics and Automation (ICRA), 2010 IEEE Interna-
tional Conference on, pages 142–147.
Moosmann, F., Pink, O., and Stiller, C. (2009). Segmen-
tation of 3d lidar data in non-flat urban environments
using a local convexity criterion. In Intelligent Vehi-
cles Symposium, 2009 IEEE, pages 215–220.
Morton, P., Douillard, B., and Underwood, J. (2011). An
evaluation of dynamic object tracking with 3d lidar.
In 2011 Australasian Conference on Robotics and Au-
tomation (ACRA). ACRA.
Navarro-Serment, L. E., Mertz, C., and Hebert, M.
(2010). Pedestrian detection and tracking using three-
dimensional ladar data. The International Journal of
Robotics Research, Special Issue on the Seventh In-
ternational Conference on Field and Service Robots,
29(12):1516 – 1528.
Petrovskaya, A. and Thrun, S. (2009). Model based vehicle
detection and tracking for autonomous urban driving.
Auton. Robots, 26(2-3):123–139.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
118

Quigley, M., Gerkey, B., Conley, K., Faust, J., Foote, T.,
Leibs, J., Berger, E., Wheeler, R., and Ng, A. (2009).
ROS: an open-source Robot Operating System. IEEE
Int. Conf. on Robotics and Automation (ICRA), Work-
shop on Open Source.
Reid, D. (1979). An algorithm for tracking multiple targets.
IEEE Transactions on Automatic Control, 24(6):843–
854.
Rényi, A. (2007). Probability Theory. Dover books on
mathematics. Dover Publications, Incorporated.
Rusu, R. B. (2014). The Point Cloud Library (PCL).
Schulz, D., Burgard, W., Fox, D., and Cremers, A. B.
(2003). People tracking with mobile robots using
sample-based joint probabilistic data association fil-
ters. The International Journal of Robotics Research,
22(2):99–116.
Shackleton, J., VanVoorst, B., and Hesch, J. (2010). Track-
ing people with a 360-degree lidar. In Proceedings of
the 2010 7th IEEE International Conference on Ad-
vanced Video and Signal Based Surveillance, AVSS
’10, pages 420–426, Washington, DC, USA. IEEE
Computer Society.
Steinhauser, D., Ruepp, O., and Burschka, D. (2008). Mo-
tion segmentation and scene classification from 3d li-
dar data. In Intelligent Vehicles Symposium, 2008
IEEE, pages 398–403.
Vo, B.-N. and Ma, W.-K. (2006). The Gaussian mixture
probability hypothesis density filter. IEEE Transac-
tions on Signal Processing, 54(11):4091–4104.
Wang, C.-C. (2004). Simultaneous Localization, Mapping
and Moving Object Tracking. PhD thesis, Robotics
Institute, Carnegie Mellon University, Pittsburgh, PA.
Wilhelms, J. and Gelder, A. V. (2000). Octrees for faster
isosurface generation. IEEE Transactions on Medical
Imaging, 19:739–758.
DetectionandTrackingofDynamicObjectsusing3DLaserRangeSensoronaMobilePlatform
119
