
Control of a Pedaled, Self-balanced Unicycle with Adaptation Capability
Chun-Feng Huang and T.-J. Yeh
Department of Power Mechanical Engineering, National Tsing Hua University, Hsinchu 30013, Taiwan
Keywords:
Electric Unicyle, Wheeled Inverted Pendulum, Adaptation, Control.
Abstract:
In this paper, a pedaled, self-balanced, personal mobility vehicle is developed. The vehicle is structurally
similar to a pedaled unicycle but uses a brushless DC (BLDC) hub motor as its main driving wheel. In order
to reduce the interference and provide a better human-machine interaction, a novel balancing controller with
adaptation capability is proposed. This balancing controller, when working together with a specially designed
low-level BLDC driver, can adapt to the uncertain center of gravity of the vehicle frame plus the rider, and the
amount of motor torque that fights against the pedaling torque can be reduced to minimum. The performance
of the control system is validated by simulations.
1 INTRODUCTION
In densely populated urban environments, EVs for
personal mobility purposes are increasingly accepted
as capable, even appealing, forms of transportation.
Following the recent advances in digital computers,
senor and actuator technology, and control theory, re-
searchers now have the opportunity to radically con-
template new concepts for the personal mobility EVs
of next generation. One of the innovative products
is Segway, the personal transporter invented by Dean
Kamen(Kamen, 2001). Segway is basically a two-
wheel mobile inverted pendulum. The equipped con-
trol system regulates the total and the differential
torques on the motored wheels to keep the transporter
balanced, moving forward and backward, and making
turns based on the posture of the rider standing on the
chassis. Since the release of Segway, several vehicles
with the structure of a mobile wheeled inverted pen-
dulum have been developed. Examples include Toy-
ota’s winglet(Toyota, 2008), Honda’s U3-X(Honda,
2009), Enicycle(Polutnik, 2006), and so on.
In this paper, a novel, motor-driven, personal mo-
bility vehicle, named Legway, is proposed. As shown
in Fig. 1, Legway is structurally similar to a pedaled
unicycle but with two small auxiliary wheels on the
sides of the main driving wheel. The main driving
wheel is itself a brushless DC (BLDC) hub motor.
The rider can drive Legway forward either electri-
cally by electrical throttle or manually by pedaling it
as the conventional bicycle. The electric driving and
the manual driving can be exercised simultaneously
for the sake of saving the man power or the electric
power. The steering of Legway is achieved by brak-
ing the left auxiliary wheel (for turning left) or the
right auxiliary wheel (for turning right).
Due to the unique driving method, the control de-
sign for Legway requires a special attention. When
the rider pedals, not only the pedalling torque from
the rider but also the controlled torque from the motor
are applied simultaneously on the vehicle. To ensure
efficient operation, it is crucial that these two torques
achieve coordination that they do not interfere with or
fight against each other. In order to reduce the inter-
ference and provide a better human-machine interac-
tion, a novel balancing controller with adaptation ca-
pability is proposed. This balancing controller, when
working together with a specially designed BLDC
motor driver, can adapt to the uncertain center of grav-
ity of the vehicle plus the rider during the pedalling,
and automatically slews the vehicle frame to a balanc-
ing posture depending on the amount of assistive mo-
tor torque demanded. In such a posture, the amount
of motor torque that fights against the pedaling torque
is reduced to minimum.
This paper investigates the modeling and control
issues of Legwayand is organized as follows: Section
2 shows the system model which includes the mech-
anism dynamics and the motor dynamics. A motor
driveris particularly introduced to properly switch the
modes of operation of the BLDC motor so that a con-
sistent representation of the motor dynamics can be
achieved. In Section 3, a new balancing controller
is proposed and a stability theorem is given to design
120
Huang C. and Yeh T..
Control of a Pedaled, Self-balanced Unicycle with Adaptation Capability.
DOI: 10.5220/0005057801200126
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 120-126
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the control matrices in the controller. Simulations are
performed in Section 4 to verify the usefulness of the
control system. Finally, conclusions are given in Sec-
tion 5.
Figure 1: Photo of Legway.
2 SYSTEM DESCRIPTION
2.1 Model of Legway
Legway’s movement is mainly dictated by its motion
in pitch direction. The pitch dynamics can be charac-
terized by a WIP model in Fig.2. In the model shown,
m
w
and I
w
respectively denote the mass and inertia of
the wheel, m
b
and I
b
respectively denote the mass and
inertia of the pendulum body (which includes the ve-
hicle frame and the rider all together), r is the wheel
r
wheel
(m
w
, I
w
)
body
(m
b
, I
b
)
t
w
=
t
m
+
t
p
q
b
f
q
g
q
b
=
q
g
+
f
q
w
l
Figure 2: Schematics of the wheeled inverted pendulum
(WIP) model.
radius, l is the distance from the wheel axle to the
center of gravity (COG) of the pendulum body, θ
w
is
the absolute rotation angle of the wheel, θ
g
is the ab-
solute inclination angle of the COG of the pendulum
body, θ
b
is absolute inclination angle of a fixed spot
on the vehicle frame where the tilt sensor is attached
and φ ≡ θ
b
− θ
g
is the angular difference between θ
b
and θ
g
, τ
w
is the relative mechanical torque between
the pendulum body and the wheel that τ
w
consists of
the motor torque τ
m
, and the rider’s pedaling torque
τ
p
. It should be noticed that φ could be a time-varying
quantity due to the rider’s posture change during the
riding.
Using the Lagrange formulation, one can derive
the dynamic equation as:
H(q)
¨
q+ C(
˙
q,q)
˙
q+ g(q) = τ (1)
where
q =
θ
g
θ
w
T
,
τ =
(τ
m
+ τ
p
) (τ
m
+ τ
p
)
T
,
H(q) =
I
b
+ m
b
l
2
−m
b
lrc
g
−m
b
lrc
g
I
w
+ (m
w
+ m
b
)r
2
,
C(
˙
q,q) =
0 0
m
b
lrs
g
˙
θ
g
0
, and
g(q) =
−m
b
gls
g
0
T
. Notice that in the
expressions for H(q) , C(
˙
q,q) , and g(q) , s
g
and c
g
are the abbreviations for sinθ
g
and cosθ
g
respectively.
The dynamic equation indicates that the min-
imum number of states required to describe the
system is three and the state vector is chosen as
θ
g
˙
θ
g
˙
θ
w
T
. Equation (1) can be linearized
around the equilibrium state
0 0 0
T
with τ
m
=
τ
p
= 0, and the linearized state equation is given by:
d
dt
δθ
g
δ
˙
θ
g
δ
˙
θ
w
=
0 1 0
αλ
η
0 0
0 0 0
δθ
g
δ
˙
θ
g
δ
˙
θ
w
+
0
α+γ
η
β+γ
η
(δτ
m
+δτ
p
)
(2)
where, α = I
w
+ (m
w
+ m
b
)r
2
, β = I
b
+ m
b
l
2
, γ =
m
b
lr, λ = m
b
gl, η = αβ − γ
2
. In (2), δ represents the
perturbation around the equilibrium state. For sim-
plicity, the symbol δ will be ignored in the subsequent
discussion.
2.2 Motor Dynamics and Motor Driver
As revealed by the eigenvalues of the system matrix
in (2), the pitch dynamics of Legway is open-loop un-
stable. Moreover, the state equation therein can be
ControlofaPedaled,Self-balancedUnicyclewithAdaptationCapability
121

used to verify that the system is controllable under
the motor torque τ
m
. Therefore, τ
m
can be used to not
only stabilize/balance the vehicle but also act as an al-
ternative source of propulsion to the rider’s pedaling
torque.
The motor torque, which is generated by a BLDC
hub motor, is regulated by controlling the motor cur-
rent via a motor driver. Since both positive torque or
negative torque for a wide range of rotational speed
is needed for balancing, accelerating or decelerating
the vehicle, the motor driver devised for this research
can automatically switch between the motoring mode
and the regeneration mode for the sake of energy ef-
ficiency. The motor driver also provides a simple,
consistent motor dynamics regardless of the mode
switching.
The switching module in the motor driver as pro-
posed in (Wu and Yeh, 2013) is adopted here. This
module determines which mode the motor should be
switched to for proper operation. Furthermore, to fa-
cilitate the subsequent control design, it also performs
an input transformation so that a single 1st order dif-
ferential equation in the form of
L
di
dt
+ Ri = u (3)
can describe the current dynamics for all the four
modes. According to (3), the input to the differen-
tial equation, consequently the switching module is u.
How the mode of operation is selected and how the
duty ratios for PWM switching are computed from
the input u, the measured coil current (i), and the ro-
tational speed (ω) are given in (Wu and Yeh, 2013).
3 BALANCING CONTROL
In Legway, the COG of the vehicle body is dictated by
the rider’s posture and is uncertain to the control sys-
tem. The successful operation of Legway requires the
control system to adaptively estimate the uncertain
COG, slew it to a balanced position and then main-
tain the motor torque at a commanded value. When
the torque command is zero, the COG is slewed to
the top of the wheel axle so that the rider feels mini-
mum interference from the motor as he/she pedals the
vehicle. The rider also does not have to worry about
the uncontrollable acceleration of the vehicle even if
he/she has yet learned to properly place his/her COG
when he first rides the vehicle. In the case that the
commanded torque is nonzero, the motor produces an
assistive torque for climbing hills, or stopping the ve-
hicle via regenerative braking.
3.1 Controller Design
The state equation and the output equation for the
controller design are in the form of
˙x = Ax+ Bu+ B
τ
τ
p
(4)
y = x+ Cϕ (5)
where x,u,y are respectively the state, the input, and
the output vectors, ϕ represents the output distur-
bance, and A, B, C are system matrices. The state
equation, which uses x =
θ
g
˙
θ
g
i
T
as the state
vector and u =u, is obtained by concatenating the dy-
namics of θ
g
and
˙
θ
g
in (2) with the current dynamics
in (3) via τ
m
= k
m
i, so A=
0 1 0
αλ
η
0
α+γ
η
k
m
0 0 −
R
L
,B =
0
0
1
L
,B
τ
=
0
α+γ
η
0
. Notice that because it is up
to the rider to apply the pedaling torque or the current
command to control the wheel speed, in the controller
design
˙
θ
w
is not considered as a state variable. As for
the the output y, it consists of the measured pitch an-
gle (θ
b
) and the pitch rate (
˙
θ
b
) from the inclinometer
and the rate gyro installed on the vehicle frame
1
, and
the motor current (i) from the hall sensors in the mo-
tor. It is assume that the the rider’s posture remains
relatively fixed to the vehicle frame, so φ = θ
b
− θ
g
is
constant and
˙
φ =
˙
θ
b
−
˙
θ
g
= 0. This gives ϕ =φ,and
C =
1 0 0
T
.
The control objective is to use the feedback from
y to devise a control law for u to make x asymptot-
ically converge to a reference state x
d
. The major
challenge here is that the output is contaminated by
unknown output disturbance ϕ, so an adaptive scheme
is required for the control system to on-line estimate
and then cancel ϕ. In the following investigation,
we will temporarily ignore τ
p
, and pose the control
problem in a more general setting for x ∈ R
n
, u ∈ R
p
,
and ϕ ∈ R
q
which correspond to A ∈ R
n×n
, B ∈ R
n×p
,
and C ∈ R
n×q
. The controller design for the general
problem is given in the following theorem.
Theorem 1: Given the system in (4)(5) with τ
p
=
0, and ϕ being an unknown, constant output distur-
bance, assume that A is invertible, (A,B) control-
lable, and C has full rank. The control system con-
taining
u = −K(ˆx− x
d
) + u
d
(6)
1
˙
θ
b
is measured directly from the rate gyro. However,
to increase the sensing bandwidth, the measurement for θ
b
is obtained by merging the outputs of the rate gyro and
the inclinometer using a complementary filter(T.-J. Yeh and
Wang, 2005).
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
122

as the control law, and
·
ˆ
ϕ = −K
ϕ
(ˆx− x
d
) (7)
as the estimation law can make x asymptically con-
verge to a reference state x
d
. In (6) and (7),
ˆ
ϕ is the
estimation for ϕ, ˆx is the estimated state vector and is
computed by y − C
ˆ
ϕ, x
d
is a constant reference com-
mand and u
d
is the corresponding feedforward con-
trol and both of which should satisfy the structural
constraint
Ax
d
+Bu
d
= 0, (8)
K is the state feedback matrix which makes A
c
, where
A
c
= A− BK is the nominal closed-loop system ma-
trix, a stable matrix, and finally K
ϕ
is the estimator
gain matrix which is computed via the following pro-
cedure:
1. Choose Q
1
= Q
T
1
> 0, Q
2
= Q
T
2
> 0. Com-
pute the solution R = R
T
> 0 to the Lyapunov matrix
equation
RA
c
+ A
T
c
R = −Q
1
< 0 (9)
and then the matrix
S= (Q
2
A
−1
)
T
+RBK. (10)
Make sure S is invertible by choosing a ”sufficiently
small” Q
1
or ”sufficiently large” Q
2
2
.
2. Define
D = I
n×n
−SC(C
T
A
T
SC)
−1
C
T
A
T
(11)
W = C(C
T
A
T
SC)
−1
C
T
A
T
(12)
and choose Q
3
= Q
T
3
> 0. Compute P, the solution to
the following Riccati equation:
A
T
c
(D
T
+W
T
Q
2
A
−1
)
T
P+ P(D
T
+W
T
Q
2
A
−1
)A
c
+P(W+ W
T
)P = −Q
3
< 0.
(13)
3. K
ϕ
is computed by
K
ϕ
= (C
T
A
T
SC)
−1
C
T
A
T
P ∈ R
q×n
(14)
Proof. Using a Lyapunov function given by
V = (ˆx− x
d
)
T
P(ˆx− x
d
) +
˜
ϕ
T
C
T
Q
2
C
˜
ϕ+
·
˜x
T
R
·
˜x
(15)
one can prove that ˜x → 0, and
˜
ϕ → 0.
4 SIMULATIONS
The proposed balancing controller is designed based
on the linearized model of Legway. It is then applied
to the nonlinear model consisting of the mechanism
dynamics in (1) and motor dynamics in (3), and the
control performance is examined using simulations.
Table 1: Parameters of Legway model used in the simula-
tion.
Mechanical part Motor part
m
w
6 kg R 0.37 Ω
I
w
0.0927 kg-m
2
L 0.503 mH
r 0.25 m k
m
1.11186 N-m/A
m
b
88 kg l 0.85 m
I
b
17.6983 kg-m
2
The system parameters for simulations are listed in
Table 1.
The control gain K, which is de-
signed using LQR method, is given by
K =
419.538 67.835 0.0229
. By choosing
Q
1
= 1× 10
−8
I
3
, Q
2
= I
3
and Q
3
= 7×10
−5
I
3
, R and
P are solved, and the estimator gain matrix is given
by K
ϕ
=
15.9391 2.7042 9.5750× 10
−4
3
.
The closed-loop poles for this design are − 3.577,
−8.648 + 9.089i, −8.648− 9.089i, and −744.34 .
In the simulation, the performance of the pro-
posed controller is compared to two other controllers
respectively referred to as Controller A and Con-
troller B. Controller A uses the measured, biased
states for feedback so that u = −Ky. Controller
B is the one mentioned in Remark 5 and is given
by u = −K
′
y−k
I
R
˜ıdt in which the controller gains
K
′
=
472.827 67.835 0.0149
and k
I
= 5.86
are chosen to make the closed-loop poles identical to
those of the proposed controller. The first simulation
assumes that initially x=
θ
g
˙
θ
g
i
T
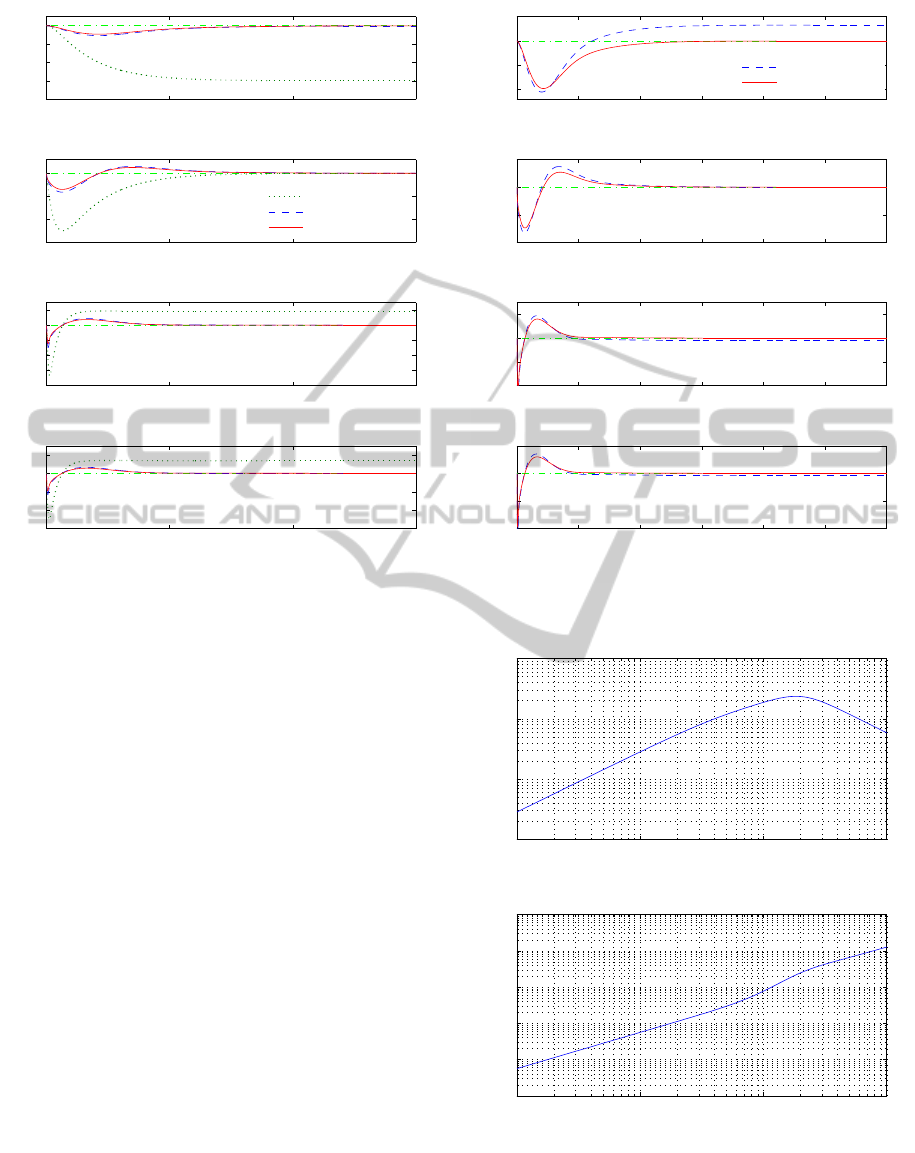
= 0. It is
desired to maintain x = 0 (by letting x
d
= 0 ) under
a constant output disturbance φ = 5
◦
. Fig.3 shows
the responses associated with the states (θ
g
,
˙
θ
g
, i) and
the control (u) for the three controllers. All three
controllers can stabilize the system, but Controller
A, because the lack of estimation capability, exhibits
steady errors in θ
g
(≈ − 5.994
◦
) and i(≈ 18.53A). On
the other hand, the integral action allows both Con-
troller B and the proposed controller to reject the out-
put disturbance so the state errors all settle to zero
within 1sec. It should be noted that for Controller A,
the steady state error in i results in a constant motor
torque acting on the wheel which in turn causes an
undesired acceleration to the vehicle.
To make furtherperformancecomparison between
Controller B and the proposed controller, a constant
bias of 1A is injected to the current measurement. As
2
The magnitude of Q
(•)
is quantified in terms of the ma-
trix norm.
3
Due to the fact that the magnitude of i in Amps is
much larger than the magnitudes of θ
g
and
˙
θ
g
respectively
in radians and radians per second, the third component of
K
ϕ
is much smaller than its first two components.
ControlofaPedaled,Self-balancedUnicyclewithAdaptationCapability
123
0 0.5 1 1.5
−8
−6
−4
−2
0
Time (s)
(a) Angle of COG ( θ
g
)
θ
g
(deg)
0 0.5 1 1.5
−30
−20
−10
0
Time (s)
(b) Rate of COG (d θ
g
/dt)
dθ
g
/dt (deg/s)
0 0.5 1 1.5
−80
−60
−40
−20
0
20
Time (s)
(c) Motor current (i)
i (A)
0 0.5 1 1.5
−30
−20
−10
0
10
Time (s)
(d) Control input (u)
u (V)
Controller A
Controller B
Proposed Controller
Figure 3: Responses of θ
b
, i, and vehicle speed for the
placement and removal of an 8kg deadweight.
shown in Fig.4, Controller B. which integrates i solely
for integral control, is sensitive to the measurement
bias in i and exhibits steady errors in θ
g
(≈ 0.324
◦
)
and i(≈ −1.0A). Although the proposed controller
does not explicitly consider the current bias in the de-
sign process (i.e., C=
1 0 0
T
), the integration
overall the states in the estimator does provide robust-
ness to not only the measurement bias in θ
g
but also
the bias in i, and all the states reach zero at steady
state.
During manual pedaling, τ
p
exists and φ could
be a time-varying quantity. They induce a motor
torque even if i
d
= 0. It is crucial that the control
system keeps the induced motor torque small to avoid
its interference to the pedalling action. To investigate
the influence of τ
p
and φ on the motor torque for the
proposed controller, the closed-loop magnitude re-
sponses of the motor torque (k
m
i) with respect to τ
p
and φ for the linear model are plotted in Fig.5. It can
be seen that both plots exhibit a high-pass filtering na-
ture, and in particular, the motor torque response due
to τ
p
has a 0dB crossover frequency around 0.4Hz.
Therefore, as long as τ
p
and φ are varied slowly, the
induced motor torque is kept small, so the rider can
pedal the vehicle with little interference from the mo-
tor.
0 0.5 1 1.5 2 2.5 3
−1
−0.5
0
0.5
Time (s)
(a) Angle of COG ( θ
g
)
θ
g
(deg)
0 0.5 1 1.5 2 2.5 3
−10
−5
0
5
Time (s)
(b) Rate of COG (d θ
g
/dt)
dθ
g
/dt (deg/s)
0 0.5 1 1.5 2 2.5 3
−20
−10
0
10
Time (s)
(c) Motor current (i)
i (A)
0 0.5 1 1.5 2 2.5 3
−10
−5
0
5
Time (s)
(d) Control input (u)
u (V)
Controller B
Proposed Controller
Figure 4: Responses of θ
b
, i, and vehicle speed for the
placement and removal of an 8kg deadweight.
10
−2
10
−1
10
0
10
1
10
−2
10
−1
10
0
10
1
f (Hz)
(a) Magnitude response of k
m
i with respect to τ
p
| k
m
i /τ
p
|
10
−2
10
−1
10
0
10
1
10
0
10
1
10
2
10
3
10
4
10
5
f (Hz)
(b) Magnitude response of k
m
i with respect to φ
| k
m
i /φ | (N/rad)
Figure 5: Responses of θ
b
, i, and vehicle speed for the
placement and removal of an 8kg deadweight.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
124

5 CONCLUSIONS
In this paper, a pedaled, self-balanced, personal mo-
bility vehicle, Legway, is developed. The vehicle is
intended to be used in densely populated urban en-
vironments that one can integrate it with the pub-
lic transportation system to increase the commuting
range. In order to reduce the interference and pro-
vide a better human-machine interaction, a novel bal-
ancing controller with adaptation capability is pro-
posed. This balancing controller, when working to-
gether with a specially designed low-level BLDC
driver, can adapt to the uncertain center of gravity of
the vehicle frame plus the rider, and the amount of
motor torque that fights against the pedaling torque
can be reduced to minimum. The performance of the
control system is validated by simulation.
ACKNOWLEDGEMENTS
The authors gratefully acknowledgethe supports from
National Science Council and National Tsing Hua
University in Taiwan.
REFERENCES
Honda (2009). U3-x. http://asimo.honda.com/innovations/
U3-X-Personal-Mobility/.
Kamen, D. (2001). Segway. http://www.segway.com/.
Polutnik, A. (2006). Enicycle. http://enicycle.com/.
T.-J. Yeh, C.-Y., S. and Wang, W.-J. (2005). Modeling and
control of a hydraulically-actuated inertial platform.
Control Engineering, 219(6):405–417.
Toyota (2008). Winglet. http://www.toyota.com.hk/
innovation/personal
mobility/winglet.aspx.
Wu, F.-K. and Yeh, T.-J. (2013). Drive-by-wire and electri-
cal steering control of an electric vehicle actuated by
two in-wheel motors. Mechatronics, 23(1):46–60.
APPENDIX
This is the proof for the negative definiteness of
˙
V.
Taking time derivative on the Lyapunov function
candidate V in (15) yields
˙
V = 2
·
ˆx
T
P(ˆx− x
d
) + 2
˜
ϕ
T
C
T
Q
2
C
·
˜
ϕ+2
·
˜x
T
R
··
˜x
= 2˙x
T
P(ˆx− x
d
) + 2[−P(ˆx− x
d
) + Q
2
C
˜
ϕ]
T
C
·
˜
ϕ
+2˙x
T
RBKC
·
˜
ϕ+ 2
·
˜x
T
RA
c
·
˜x
in which the second equality is due to
·
ˆx = ˙y− C
·
ˆ
ϕ =
˙x− C
·
˜
ϕ and differentiating the closed-loop dynamic
equation for the expression of
··
˜x. Notice that
˙x− A
c
(ˆx− x
d
) =
·
˜x− A
c
(˜x−C
˜
ϕ)
= A
c
˜x+ BKC
˜
ϕ−A
c
(˜x−C
˜
ϕ)
= (BK+A
c
)C
˜
ϕ =AC
˜
ϕ,
(16)
so C
˜
ϕ =A
−1
[˙x− A
c
(ˆx− x
d
)]. Replacing C
˜
ϕ by
such an expression,
˙
V becomes
˙
V = 2˙x
T
P(ˆx− x
d
)
+2
Q
2
A
−1
˙x− (Q
2
A
−1
A
c
+P)(ˆx− x
d
)
T
C
·
˜
ϕ
+2˙x
T
RBKC
·
˜
ϕ+ 2
·
˜x
T
RA
c
·
˜x
= 2˙x
T
P(ˆx− x
d
)
+2˙x
T
h
Q
2
A
−1
T
+ RBK
i
C
·
˜
ϕ
−2(ˆx− x
d
)
T
(Q
2
A
−1
A
c
+P)
T
C
·
˜
ϕ+2
·
˜x
T
RA
c
·
˜x
= 2˙x
T
P(ˆx− x
d
) + SC
·
˜
ϕ
−2(ˆx− x
d
)
T
(Q
2
A
−1
A
c
+P)
T
C
·
˜
ϕ+2
·
˜x
T
RA
c
·
˜x
where the third equality is due to the definition of
S in (10).
By the estimation law in (7), the definition of K
ϕ
in (14), and ϕ being constant, the dynamics associated
with
˜
ϕ is given by
·
˜
ϕ=
·
ˆ
ϕ−
˙
ϕ =
·
ˆ
ϕ = −(C
T
A
T
SC)
−1
C
T
A
T
P(ˆx− x
d
).
(17)
Replacing
·
˜
ϕ in
˙
V by the expression in (17), and then
using the definitions of D and W respectively in (11)
and (12),
˙
V can be written as
˙
V = 2˙x
T
DP(ˆx− x
d
)
+2(ˆx− x
d
)
T
(Q
2
A
−1
A
c
+P)
T
WP(ˆx− x
d
)
+2
·
˜x
T
RA
c
·
˜x
= 2(ˆx− x
d
)
T
h
A
T
c
D+ (Q
2
A
−1
A
c
+P)
T
W
i
P(ˆx− x
d
)
+2
˜
ϕ
T
C
T
A
T
DP(ˆx− x
d
) + 2
·
˜x
T
RA
c
·
˜x
where the second equality is obtained by substi-
tuting the relation ˙x = A
c
(ˆx− x
d
) + AC
˜
ϕ as implied
in (16).
Since
C
T
A
T
D = C
T
A
T
−C
T
A
T
SC(C
T
A
T
SC)
−1
C
T
A
T
= C
T
A
T
−C
T
A
T
= 0
˙
V can be further reduced to
˙
V = 2(ˆx− x
d
)
T
h
A
T
c
(D
T
+W
T
Q
2
A
−1
)
T
P
+PWP](ˆx− x
d
) + 2
·
˜x
T
RA
c
·
˜x
ControlofaPedaled,Self-balancedUnicyclewithAdaptationCapability
125

The property of a quadratic form allows one to expand
˙
V as
˙
V = (ˆx− x
d
)
T
h
A
T
c
(D
T
+W
T
Q
2
A
−1
)
T
P
+P(D
T
+W
T
Q
2
A
−1
)A
c
+P(W+ W
T
)P
i
(ˆx− x
d
)
+
·
˜x
T
(RA
c
+A
T
c
R)
·
˜x,
(18)
so according to the definitions of P and R respectively
in (13)and (9),
˙
V eventually becomes
˙
V = −(ˆx− x
d
)
T
Q
3
(ˆx− x
d
) −
·
˜x
T
Q
1
·
˜x
= −(˜x−C
˜
ϕ)
T
Q
3
(˜x−C
˜
ϕ) −
·
˜x
T
Q
1
·
˜x
(19)
Since Q
1
,Q
3
> 0,
˙
V ≤ 0. Furthermore,
˙
V =
0 if and only if ˜x = C
˜
ϕ, and
·
˜x= 0. From
the closed-loop system equations,
·
˜x= 0 gives
A
c
˜x+ BKC
˜
ϕ = 0, and with ˜x = C
˜
ϕ, one can infer
that (A
c
+ BK)C
˜
ϕ = AC
˜
ϕ = 0. The invertibility of
A and full rank condition of C lead to
˜
ϕ = 0, which
also means ˜x = 0 . Consequently, the necessary and
sufficient condition for
˙
V = 0 is equivalent to ˜x =0,
and
˜
ϕ = 0. This concludes that
˙
V is negative definite.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
126
