
Image Enhancement for Hand Sign Detection
Jing-Wein Wang
1
, Tzu-Hsiung Chen
2
and Tsong-Yi Chen
3
1
Institute of Photonics and Communications, National kohsiung University of Applied Sciences, Kaohsing, Taiwan
2
Computer Science and Information Engineering, Taipei Chengshih University of Science and Technology, Taipei, Taiwan
3
Electronic Department, National kohsiung University of Applied Sciences, Kaohsing, Taiwan
Keywords: Compact Hand Extraction, Singular Value Decomposition Based Image Enhancement, Illumination
Compensation.
Abstract: This paper proposes compact hand extraction to assist in computerized handshape recognition. We devised
an image enhancement technique based on singular value decomposition to remove dark backgrounds by
reserving the skin color pixels of a hand image. The polynomial approximation YCbCr color model was
then used to extract the hand. After alignment, we applied illumination compensation to the adaptable
singular value decomposition. Experimental results for images from our database showed that our method
functioned more efficiently than conventional ones that do not use compact hand extraction against complex
scenes.
1 INTRODUCTION
Handshape is an active area of research in visual
studies, mainly for handshape recognition and
human computer interaction (HCI). The goal of
handshape interpretation is to advance human-
machine communication so that it resembles human-
human interactions more closely. Handshape
recognition in an image poses a challenge because
such recognition must locate a hand with no prior
knowledge regarding its scale, location, pose, and
image content. Background and illumination are also
problems not yet fully resolved, and numerous other
factors can contribute to the external variability of
in-plane and out-of-plane rotations. Over the last
decade, several methods of applications in advanced
handshape interfaces for HCI have been suggested,
but these differ from one another in their models.
Some of these models are referred to in the current
research (Farouk et al.; 2009, Thangali et al., 2011,
Holt et al., 2009)
To detect a hand from an image, the whole image
is scanned exhaustively to find the likely area of the
hand pattern, and then a location and boundary
description of that area is created. The initial
screening scheme is critical and can reduce the
subsequent time spent on processing; however,
poorly performed segmentation may disfigure the
image of the hand. A common strategy for hand
detection is skin-based matching, which determines
the image pixels that could represent a shade of
human skin (Murthy et al., 2009, Butalia et al., 2010,
Khan et al., 2008, Rehrl et al., 2010). This approach
provides robustness and automation for holistic
descriptions, and serves as a front end for hand
extraction from a complex background. An example
of the skin-based matching approach is the color
modeling approach (Kim et al., 2008) applied in the
hue-saturation-intensity (HSI) color space. This
model was built by adopting B-spline curve fitting to
devise a mathematical model for describing the
statistical characteristics of skin color with respect to
intensity. Although the color segmentation method
based on B-spline curve fitting has been shown to be
a powerful learning algorithm for skin color
detection, the method of fitting four-bar graphs to
continuous curves relies mostly on the quality and
quantity of the training data. The uniform color
space defined by the International Commission on
Illumination (CIE) is known as L*a*b*, which has a
more compact skin color cluster than RGB or HSI
color spaces (Yin and Xie, 2007). To optimize the
use of limited training data, a Restricted Coulomb
Energy (RCE) neural network was designed to
represent the L*a*b* color values of a pixel,
wherein the middle-layer cells embed information
on skin color, and the output layer communicates
with the corresponding color class. Although the
RCE neural network can classify the input color
186
Wang J., Chen T. and Chen T..
Image Enhancement for Hand Sign Detection.
DOI: 10.5220/0005059101860192
In Proceedings of the 11th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2014), pages 186-192
ISBN: 978-989-758-046-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

signal as a skin color class and identify the pixels
represented by this color signal as skin texture, some
non-skin pixels can be falsely detected because of
lighting conditions. Other approaches use a
background-subtraction strategy (Jimenez-
Hernandez, 2010), wherein a component image can
be segmented easily. However, this method works
only for particular conditions related to the speed of
objects and the frame rate, and is highly sensitive to
the frame difference threshold. Adan et al. (2008)
presented a hand biometric system for verification
and recognition purposes that relied on the natural
reference system (NRS) based on a natural hand
layout. Although neither hand pose training nor a
prefixed position is required in the registration
process, users have to extend their hand fully. For
successful recognition to occur, only a small degree
of rotation is allowed, and the background must be
fixed initially.
Although skin color (Kakumanu et al., 2007)
differs across ethnic groups, they are distributed in a
narrow range on the chrominance plane. Variability
in skin tone under varying illumination conditions
results from different intensities. Because the color-
based method can encounter problems in detecting
skin color robustly against a complex background, a
potential strategy is to start with low-level cues
corresponding to the early attentive visual features in
biological vision, such as the palm and fingers
(Kumar et al., 2003), and to combine these by
anthropometry for locating a potential target for
hand detection. Handshapes can also be described by
skeleton analysis (Bakina, 2011), which allows a
comparison of hands with separated fingers as well
as with closed fingers. Nevertheless, this method is
restricted to a simple background in a fixed manner
as presented in Adan et al. (2008).
A single detector may not cope effectively with
variations in the foreground hand while
simultaneously discriminating between the
foreground and background, especially in
applications in which lighting varies widely. To
avoid explicit detection of the foreground hand
object, we propose an enhancement-before-detection
strategy. Contrast enhancement can significantly
improve the discovery of an image by emphasizing
the background and removing dark objects before
performing skin color segmentation. This alleviates
the burden of skin-color modeling and focuses
instead on labeling only the true skin pixels. A novel
aspect of the proposed method involves exploiting
the possible combinations of true skin color
detection and contrast enhancement for robust hand
extraction. The contrast method relies on differences
in depth of focus between the foreground hand
object and the background environment. An accurate
and efficient method for hand extraction is still
lacking for color images with a cluttered background,
illumination and posture alterations, in-plane and
out-of–plane rotations, and scale variations because
such conditions complicate the detection of hand
features. Years of experimental research have shown
that each type of detection technique performs better
for detecting isolated features. Therefore, for every
selected feature, a fusion of methods from both
categories should provide more stable results than
one method alone. Based on this reason, and
motivated by the observation of the “paw” shape of
human hands, we propose complementary
techniques based on contrast enhancement and skin
color detection. The goal of our approach is to
provide an efficient system that operates on complex
backgrounds and tolerates illumination and scale
variations, and moderate rotations of up to
approximately 15˚.
In the next section of this paper, we describe the
compact hand-extraction problem, including cascade
processes in background removal, disassembling and
recombining fingers based on hand anatomy, and
illumination compensation. Section 3 presents a
discussion of the experimental result with and
without compact hand extraction, to corroborate the
proposed framework. Finally, Section 4 offers a
conclusion.
2 COMPACT HAND
EXTRACTION
Compact hand extraction is divided into four stages:
background removal, alignment, finger disassembly
and recombination, and illumination compensation.
2.1 Background Removal based on
Singular Value Decomposition
The main purpose of background removal is to
extract the desired object of an image and remove
the unwanted background. The object constitutes the
hand that should be kept in an image, whereas the
background includes the remaining part of the
image, which should be removed. The concepts of
object and background are relative, and they depend
partly on the specific aims of a research. These aims
determine pixel areas that should be modified,
partially modified, and unmodified. To extract a
hand region for feature extraction, we propose
ImageEnhancementforHandSignDetection
187

removing the background by first using singular
value decomposition (SVD) (Kalman, 1996)-based
image enhancement (SVDIE), and then performing
skin color detection (SCD). SVD is a numerical
technique for diagonalizing matrices wherein the
transformed domain consists of basic states that are
optimal to a degree. In general, for any intensity
image matrix
A
,
BGRA ,,
, SVD can be
written as
,
V
U
T
A
AAA
(1)
where
A
U
and
A
V
are orthogonal square matrices,
and the
Z
A
matrix represents intensity data and
contains the sorted singular values on its main
diagonal. Because the hand is located in the
foreground of a handshape image and exhibits
strong-intensity information, the sub-image of the
hand region can be extracted by multiplying
Z
A
of
the original image by an enhancing constant. The
ratio of the largest singular value of the generated
normalized matrix over an input image is calculated
by
,
max
max
1,5.0
A
gau
Z
Z
(2)
where
1,5.0
gau
Z
is the singular value matrix of
the synthetic intensity matrix corresponding to the
background (with no illumination problems and
having a Gaussian PDF with a mean of 0.5
corresponding to the gray level with a value of 127
and a variance of 1 corresponding to the gray level
with a value of 32), and τ is a weighting constant
that was set at 6 in this study, but may vary across
data sets. The obtained ratio
was used to
regenerate a new singular value matrix, which is
actually an equalized intensity matrix of the image
generated by
,
T
AAAe
VZU
A
(3)
where
A
e
represents the equalized image in A color
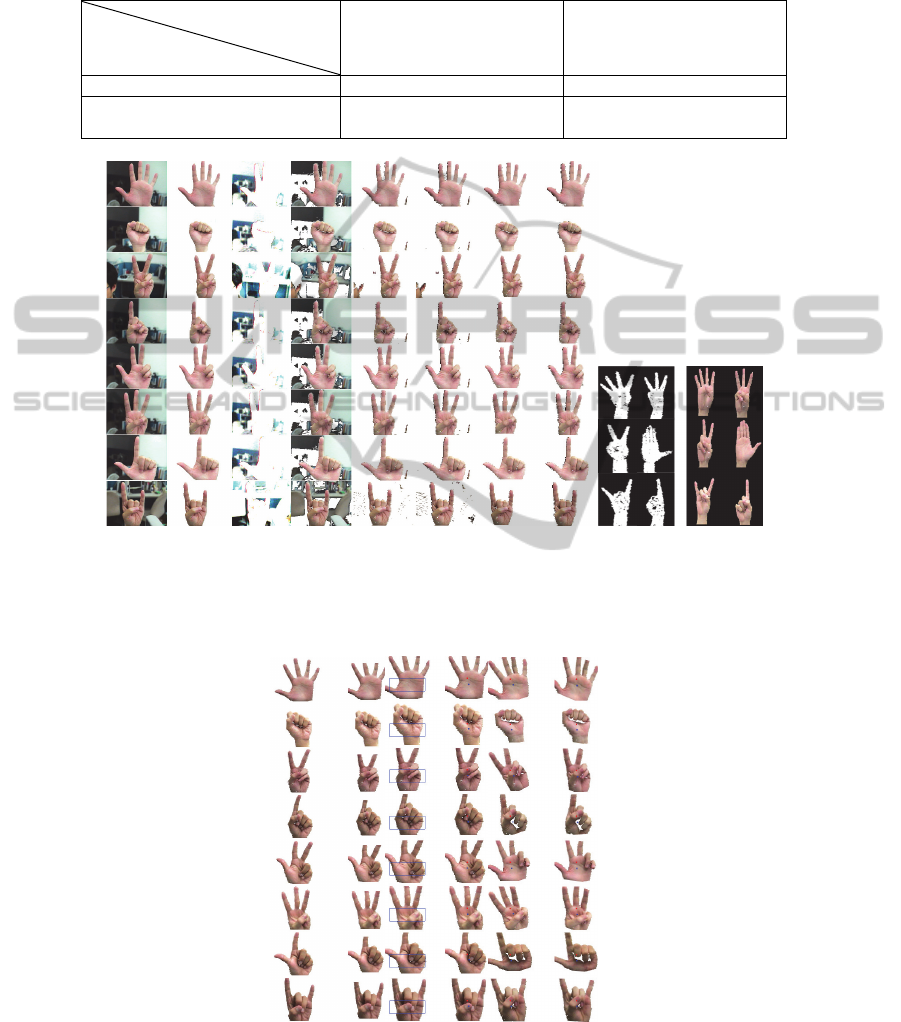
channels. Each image of eight classes is shown in
Fig. 1(a), and the ground truth of hand extraction is
shown in Fig. 1(b). The result of SVDIE is shown in
Fig. 1(c).
In the next stage, we subtracted the SVDIE
image from the original one, and the results are
shown in Fig. 1(d). To remove the remaining
background around the hand, we performed a
chrominance-based SCD segmentation with the
Y
C
b
C
r
color model. The Y value represented the
luminance component, whereas the
C
b
and
C
r
values represented the chrominance component
of the image. When a background-subtracted image,
as shown in Fig. 1(d), was presented to the system, a
modified Y
C
b
C
r
model (Kumar et al., 2003) was
applied to build an adaptable skin color cue to
enable robust hand detection (Fig. 1(e)). Compared
to the manual ground truth shown in Fig. 1(b), our
method achieved a high detection rate with a low
false alarm, producing a recall rate of 96.46% and a
precision rate of 92.51% for 100 images (Table 1).
Figure 1(f) shows that the major drawback of
color-based localization techniques is the variability
of the skin color footprint under varying lighting
conditions, especially for boundary pixels
neighboring a dark background. This frequently
results in undetected skin regions or falsely detected
non-skin textures. As shown in Fig. 1(e), this
problem can be resolved using the proposed SVDIE
and the SCD method. Figure 1(g) shows the
performance of the proposed SVDIE method after
residual purging in comparison with Fig. 1(h). For
further study, as shown in Fig. 1(i), more holes with
different sizes and jagged boundaries were present in
the extracted hands of Yin and Xie’s work (2007)
than in ours. The advantage of the comparison is that
it renders the proposed method more suitable for
hand extraction for handshape recognition.
2.2 Alignment and Finger
Recombination
The need to align, or register, the two hand images is
one of the most important steps toward compact
hand extraction. This stage involves identifying a
spatial mapping that places elements in one hand
image into meaningful correspondence with
elements in a second hand image. This process is
often guided by similarity measures between images
that are computed from the image data. However, in
time-critical applications, the whole-image-data
method for computing similarity is too slow. Instead
of using all the image data to compute similarity, a
subset of pixels can be used to enhance speed;
however, this method may reduce accuracy.
The centroid of an area is similar to the center of
gravity of a body. Calculating the centroid involves
only the geometrical shape of the area. The center of
gravity is equal to the centroid if the body is
homogenous (i.e., if it has a constant density). Based
on the geometric centroid, the coordinates of the
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
188

global centroid (
G
x
,
G
y
) can be obtained. Similarly,
the coordinates (
L
x
,
L
y
) of the local centroid can
be calculated. We define the pan or tilt
of Eq. (4)
below as “the angle between the line passing
through the global centroid of the whole hand region
and the local centroid of the subregion underneath
the global centroid.”
/180
tan
1
xx
yy
LG
LG
.
(4)
The hand image, with rotation in plane
, can be
rotated back to the upright position (orientation
alignment). The detailed hand-alignment algorithm,
where the region of interest (ROI) is determined to
contain as much information as possible (Fig. 2), is
summarized as follows:
1). Given a hand detection image (Fig. 2(a)):
2). Calculate the coordinates of the global
centroid (
G
x
,
G
y
) of the skin region;
3). Block out the ROI with size 100 × 100 pixels,
based on the obtained global centroid (Fig. 2(b));
4). Block out the sub-ROI with size 30 × 80
pixels underneath the global centroid (Fig. 2(c));
5). Calculate the coordinates of the local centroid
(
L
x
,
L
y
) of the segmented subregion (Fig. 2(d));
6). Align the image (Fig. 2(e)), following the
calculation of pan/tilt
(Fig. 2(f)).
2.3 Illumination compensation
Recent research has shown the utility of color in skin
detection. To reduce the effect of illumination on
color, we further applied SVD to compensate for
lighting. To enable partial compensation for
variations in lighting without altering the raw data
and losing skin color information from the facial
image, we suggest adjusting the compensation value
dynamically, according to the ratio of the average
individual RGB values. This method is highly
effective in preserving the skin color data contained
in raw images.
Our observations indicated that an overall
weighting by fixed-ratio illumination compensation
may be unsuitable for all three color channels (R, G,
and B). This method restricts the color variation in
hand images to a constrained dynamic range, thus
failing to display differences between images of
different hands and severely affecting recognition.
Thus, we devised a method that uses a sliding
adjustment of the compensation weightings for each
R, G, and B color channel. In this method, the pre-
compensation mean for each color channel in the
RGB image is first calculated. Using the highest of
these channels as a reference value, individual
compensation weighting coefficients for the
remaining two channels are derived adaptively,
according to their ratio to the highest mean. This
technique is shown in Eqs. (5)-(8), as follows:
),,Max(
BGR
, (5)
Z
Z
R
gau
R
Max
Max
1,5.0
R
, (6)
Z
Z
G
gau
G
Max
Max
1,5.0
G
,
(7)
Z
Z
B
gau
B
Max
Max
1,5.0
B
, (8)
where
R
,
G
, and
B
are the individual
compensation coefficients for the R, G, and B
channels, and μ
R
, μ
G
, and μ
B
are the color means for
each channel, respectively.
1,5.0
G
Z
represents
the synthesized normalized intensity image (with no
illumination problem and having a Gaussian
probability distribution function with a mean of 0.5
and a variance of 1).
3
EXPERIMENTAL RESULTS
In practical applications, significant variations occur
among fingers for each class of handshapes.
Therefore, the fingers should be disassembled and
recombined to remove gaps before proceeding with
handshape recognition. We selected six handshape
images randomly from our database to examine the
proposed methodology. Specifically, as shown in
Figs. 3(a)-3(c), the fingers are horizontally and
vertically scanned pixel-by-pixel and saved as a
more compact form for robust discrimination. The
compensation results are shown from left to right in
Fig. 3(d). The left column shows the original
images, and the middle column shows the images
after illumination compensation, using the overall
weighting method. Skin color data for same-class
hands were concentrated, but data for different-class
hands were also extremely concentrated,
highlighting overlap among classes being highly
deleterious to handshape recognition. The final right
column shows images after illumination
compensation, using the proposed method, which
produced the following results: (1) the effects of
variations in lighting were greatly ameliorated; and
ImageEnhancementforHandSignDetection
189

(2) skin color data for same-class hands were both
more concentrated and similar to those of the
original images, whereas skin color data for
different-class hands showed a marked difference.
These attributes are highly advantageous for
handshape recognition.
To analyze the clustering performance of original
hands and compensated hands, we used the three
leading eigenhands derived from principal
component analysis (PCA) to examine their
capability to collect similar objects into groups.
With three samples per subject, corresponding to
Fig. 3(d), Fig. 3(e) shows that the results from
compensated hand images were more enhanced than
those of hand images without compensation. The
proposed method substantially outperformed the
overall weighting method in clustering. Figure 3
shows that the method reduced the undesired effects
of lighting variances.
4 CONCLUSIONS
A compact hand extraction algorithm for handshape
recognition of handshapes has been proposed and
tested using our database and video sequences.
Based on our SVDIE criteria, this approach
performed optimally compared to existing methods.
The effectiveness was a result of the ability of the
proposed method to recombine fingers and extract
hand regions precisely.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the support
received from NSC through project number NSC
102-2221-E-151-038.
REFERENCES
Farouk, M., Sutherland, A., and Shoukry, 2009. A. A.,
2009. A Multistage hierarchical algorithm for hand
shape recognition. In IMVIP 2009 - 13th International
Machine Vision and Image Processing Conference, pp.
106-110.
Thangali, A., Nash, J. P., Sclaroff, S., and Carol, N. 2011.
Exploiting phonological constraints for handshape
inference in ASL video. In IEEE Conference on
Computer Vision and Pattern Recognition, pp. 521-
528.
Holt, G. A. T., Reinders, M. J. T., Hendriks, E. A., Ridder,
H. D., and Doorn, A. J. V., 2009. Influence of
handshape information on automatic sign language
recognition. In Proc. Gesture Workshop, pp. 301-312.
Murthy, G. R. S., and Jadon, R. S., 2009. A review of
vision based hand gestures recognition. International
Journal of Information Technology and Knowledge
Management, vol. 2, pp. 405-410.
Butalia, A., Shah, D., and Dharaskar, R. V., 2010. Gesture
Recognition System. International Journal of
Computer Applications, vol. 1, pp. 61-67.
Khan, I. R., Miyamoto, H., and Morie, T., 2008. Face and
arm-posture recognition for secure human-machine
interaction. In Proceedings of IEEE International
Conference on Systems, Man and Cybernetics, pp.
411-417.
Rehrl, T., Bannat, A., Gast, J., Wallhoff, F., Rigoll, G.,
Mayer, C., Riaz, Z., Radig, B., Sosnowski, S., and
K¨uhnlenz, K., 2010. Multiple parallel vision-based
recognition in a real-time framework for human-robot-
interaction scenarios. In Proceedings of Third
International Conference on Advances in Computer-
Human Interactions, pp. 50-55.
Kim, C., You, B. -J., Jeong, M. -H, and Kim, H., 2008.
Color segmentation robust to brightness variations by
using B-spline curve modeling. Pattern Recognition,
vol. 41, pp. 22-37.
Yin, X. and Xie, M., 2007. Finger identification and hand
posture recognition for human-robot interaction.
Image and Vision Computing, vol. 25, pp. 1291-1300.
Jimenez-Hernandez, H., 2010. Background subtraction
approach based on independent component analysis.
Sensors, vol. 10, pp. 6092-6114.
Adan, M., Adan, A., Vazquez, A. S., and Torres, R., 2008.
Biometric verification/identification based on hands
natural layout. Image and Vision Computing, vol. 26,
pp. 451-465.
Kakumanu, P., Makrogiannis, S., and Bourbakis, N. G.,
2007. A survey of skin-color modeling and detection
methods. Pattern Recognition, vol. 40, pp. 1106-1122.
Kumar, A., Wong, D. C. M., Shen, H. C., and Jain, A. K.,
2003. Personal verification using palmprint and hand
geometry biometric. In Proceedings of the 4th
International Conference on Audio- and Video-based
Biometric Person Authentication, pp. 668-678.
Bakina, I. G., 2011. Person Recognition by hand shape
based on skeleton of hand image. Pattern Recognition
and Image Analysis, vol. 21, pp. 694-704.
Kalman, D., 1996. A singularly valuable decomposition:
the SVD of a matrix
. The College Mathematics
Journal, vol. 27, pp. 2-23.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
190
APPENDIX
Table 1: Performance evaluation by using the recall rate and precision rate with mean and standard deviation.
Rate
Statistics
Recall (%)
Precision (%)
Mean 96.46 92.51
Standard deviation 0.5514 0.6732
(a) (b) (c) (d) (e) (f) (g) (h) (i)
Figure 1: Background removal with and without the proposed SVDIE method: (a) Input images; (b) Ground-truths; (c)
SVDIE images; (d) Background subtraction; (e) SCD with SVDIE; (f) SCD without SVDIE; (g) Residual purging of (e); (h)
Residual purging of (f); (i) In comparison with our result (right) to the related work of Yin and Xie’s result (2007) (left).
(a) (b) (c) (d) (e) (f)
Figure: 2 Image hand extraction and alignment: (a) Detected hand images, (b) ROI images based on the global centroid, (c)
Sub-region underneath the global centroid, (d) Global centroid in red color point and local centroid in blue point,
respectively, (e) Variation among handshapes, (f) Aligned images of (d).
ImageEnhancementforHandSignDetection
191

-1000
0
1000
2000
3000
4000
5000
-2000
-1500
-1000
-500
0
500
-4000
-3500
-3000
-2500
-2000
-1500
-1000
-500
0
500
-4000
-3500
-3000
-2500
-2000
-1500
-1000
-500
0
500
(a) (b) (c) (d) (e)
Figure 3: Compact handshape images with lighting compensation: (a) Example images, (b) Aligned handshape images, (c)
Compact handshape images, (d) Images of (c) undergone lighting compensation from left to right: original images, overall
weighting method, and proposed method, (e) Clustering distribution observed from various view angles corresponding to
Fig. 3(d).
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
192
