
Enhanced Flower Pollination Approach Applied to Electromagnetic
Optimization
Carlos Eduardo Klein
1
, Emerson Hochsteiner de Vasconcelos Segundo
2
,
Viviana Cocco Mariani
2,3
and
Leandro dos Santos Coelho
1,3
1
Pontifical Catholic University of Parana, Industrial and Systems Eng. Graduate Program (PPGEPS), Curitiba, PR, Brazil
2
Pontifical Catholic University of Parana, Mechanical Engineering Graduate Program (PPGEM), Curitiba, PR, Brazil
3
Federal University of Parana (UFPR), Department of Electrical Engineering (DEE/PPGEE), Curitiba, PR, Brazil
Keywords: Metaheuristics, Swarm Intelligence, Flower Pollination Algorithm, Electromagnetic Optimization.
Abstract: It is difficult to use the deterministic mathematical tools such as a gradient method to solve global
optimization problems. Flower pollination algorithm (FPA) is a new nature-inspired algorithm of the swarm
intelligence field to global optimization applications, based on the characteristics of flowering plants. To
enhance the performance of the standard FPA, an enhanced FPA (EFPA) approach based on beta
probability distribution was proposed in this paper. In order to verify the performance of the proposed
EFPA, five benchmark functions are chosen from the literature as the test suit. Furthermore, tests using
Loney’s solenoid benchmark, a classical problem in the electromagnetics area, are realized to evaluate the
effectiveness of the FPA and the proposed EFPA. Simulation results and comparisons with the FPA
demonstrated that the performance of the EFPA approach is promising in electromagnetics optimization.
1 INTRODUCTION
Swarm intelligence is the collective behaviour of a
decentralized, self-organized system, and it is able to
distribute the functionality of an overall big system
among smaller, less-expensive and cooperative
agents (Weng et al., 2014). Swarm behavior is one
of the main features of many species in the nature. In
this context, swarm intelligence originated from the
study of colonies or swarms of social organisms
(Engelbrecht, 2007).
Nature-inspired algorithms of the swarm
intelligence field perform powerfully and efficiently
in solving global optimization problems. Recent
research studies in optimization field have led to the
development of new approaches that exhibit certain
advantages over more traditional techniques in
various aspects. Inspired by nature, these
metaheuristic algorithms have obtained promising
performance over continuous domains of
optimization problems, such as ant colony (Dorigo
and Stützle, 2004), artificial bee colony (Karaboga,
2005), krill heard (Gandomi and Alavi, 2012), bat
algorithm (Gandomi and Yang, 2014), cuckoo
search algorithm (Coelho et al., 2013), bat algorithm
(Yang, 2010), and firefly algorithm (Yang, 2009).
In the nature, many floral traits are related to the
pollination and fertilization processes, i.e. floral
traits can be adjusted by selection to ensure pollen
transfer, the subsequent growth of pollen tubes
through the pistil, and finally ovule fertilization
(Fernández et al., 2009). Pollination is a process of
transfer of pollen from male parts of flower called
anther to the female part called stigma of a flower.
Pollination of flowers can be inspiration to generate
new optimization algorithms. Examples of
algorithms based on pollination are presented in
Kasinger and Bauer (2006) and Kaur and Singh
(2012).
Recently, the flower pollination algorithm
(FPA), developed by Xin-She Yang (Yang, 2012),
was proposed. FPA is a swarm intelligence method
based on the features of flowering plants. Being a
stochastic search process, FPA is not free from false
and/or premature convergence, especially over
multimodal fitness landscapes.
The aim of this paper is to improve the FPA to
achieve a better exploration/exploitation trade-off
when applied to continuous optimization problems.
The proposed enhanced FPA (EFPA) is based on
beta probability distribution. To demonstrate the
effectiveness of the proposed EFPA framework, a
223
Klein C., Segundo E., Mariani V. and Coelho L..
Enhanced Flower Pollination Approach Applied to Electromagnetic Optimization.
DOI: 10.5220/0005074502230227
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2014), pages 223-227
ISBN: 978-989-758-052-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

set of two benchmark functions and a numerically
ill-conditioned inverse problem in the
electromagnetic field called Loney’s solenoid
benchmark problem (Di Barba and Savini, 1995;
Ciuprina et al., 2002) are solved. Loney’s solenoid
benchmark problem is a significant testbed of the
rough objective function surface typical of many
electromagnetic problems. Such problem are ideally
suited for stochastic techniques which escape from
local minima. Optimization results and convergence
performance are compared with the classical FPA.
The remainder of this paper is organized as
follows. Section 2 covers background information
on the FPA and EFPA. Section 3 provides the
description of the Loney’s solenoid benchmark.
Section 4 presents the simulation results and
discussions. Finally, we present concluding remarks
on this work in Section 5.
2 FPA AND EFPA ALGORITHMS
Swarm intelligence is based on self-organized
individuals, generally called agents, whose actions
and interaction add up to intelligent global behavior.
In particular, agents communicate to one another
merely by modifying their local environment. These
local interactions finally yield to the global self-
properties that make a system self-managing.
This section describes the classical FPA and the
proposed EFPA, both swarm intelligence
approaches. First, the fundamentals of the FPA are
introduced, and finally the mechanisms of the
proposed EFPA are mentioned.
2.1 FPA
FPA is a swarm intelligence inspired paradigm by
the flow pollination process of flowering plants.
FPA is useful to solve multimodal continuous
optimization problems. For simplicity, we use the
following four rules in the FPA, all rules suggest by
Yang (2012):
1. Biotic and cross-pollination can be considered
as a process of global pollination process, and
pollen-carrying pollinators move in a way which
obeys Lévy flights (Rule 1).
2. For local pollination, abiotic and self-
pollination are used (Rule 2).
3. Pollinators such as insects can develop flower
constancy, which is equivalent to a reproduction
probability that is proportional to the similarity of
two flowers involved (Rule 3).
4. The interaction or switching of local
pollination and global pollination can be controlled
by a switch probability p in the range [0, 1], with a
slight bias towards local pollination (Rule 4).
In reality, each plant can have multiple flowers,
and each flower patch often release millions and
even billions of pollen gametes. However, for
simplicity, we assume that each plant only has one
flower, and each flower only produce one pollen
gamete (Yang, 2012).
In order to formulate updating formulas, we have
to convert the aforementioned rules into updating
equations. For example, in the global pollination
step, flower pollen gametes are carried by
pollinators such as insects, and pollen can travel
over a long distance because insects can often fly
and move in a much longer range (Yang, 2012).
Therefore, Rule 1 and flower constancy can be
represented mathematically as:
])([)()()1( BtxL txtx
iii
(1)
where
)(tx
i
is the pollen i or solution vector
i
x at
iteration t, and B is the current best solution found
among all solutions at the current
generation/iteration. Here γ is a scaling factor to
control the step size. In addition, L(λ) is the
parameter that corresponds to the strength of the
pollination, which essentially is also the step size.
Since insects may move over a long distance with
various distance steps, we can use a Lévy flight to
imitate this characteristic efficiently.
The Lévy distribution, named for the French
mathematician Paul Lévy (Lévy, 1925), is important
in the study of Brownian motion. Lévy stable
distribution (Nolan, 2010) is a rich class of
probability distributions. It is worthy of noting that
the well-known Gaussian and Cauchy distributions
are its special cases.
A Lévy flight is a random walk in which the
step-lengths have a probability distribution that is
heavy-tailed. That is, we draw L>0 from a Lévy
distribution:
)0( ,
12/sin
~
0
1
SS
S
L
(2)
Here, Γ(λ) is the standard gamma function, and
this distribution is valid for large steps S > 0. Then,
to model the local pollination, both Rule 2 and Rule
3 can be represented as
])()([)()1( txtx Utxtx
kjii
(3)
where )(tx
j
and )(tx
k
are pollen from different
flowers of the same plant species. This essentially
imitates the flower constancy in a limited
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
224
neighborhood (Abdel-Raouf et al., 2014).
In order to imitate this, we can effectively use the
switch probability like in Rule 4 or the proximity
probability p to switch between common global
pollination to intensive local pollination.
The procedure for implementing the FPA can be
summarized by the following steps:
Step 1: Initialization of a population of flo-
wers/pollen gametes: Initialize a vectors population
(floating-point representation) of flowers/pollen
gametes in the n-dimensional problem space using
uniform probability distribution function. The
counter of generations t is initialized too.
Step 2: Evaluation of population’s fitness:
Evaluate each flower’s fitness value.
Step 3: Determine the best solution in the
population: Find the best solution B in the initial
population.
Step 4: Apply local or global pollination:
Randomly with a switch probability p if a global
pollination using Lévy distribution is applied or a
local pollination using a uniform probability
distribution function. This procedure is applied to all
flowers in the population. Update t = t + 1;
Step 5: Repeating the evolutionary cycle: Return
to Step 2 until a stopping criterion is met. In this
paper, evolutionary process is performed predefined
maximum number of generations (adopted as
stopping criterion) t
max
is reached.
2.2 Proposed EFPA
In spite of the prominent merits, sometimes FPA
shows the premature convergence and slowing down
of convergence as the region of global optimum is
approached. In this context, a trade-off between
exploration and exploitation actions must be
developed. Exploration is the process of visiting
entirely new regions of a search space, whilst
exploitation is the process of visiting those regions
of a search space within the neighborhood of
previously visited points.
In the classical FPA, the proximity probability p
is constant during the optimization process and p
takes values in the range [0, 1]. However, no optimal
choice of p was proposed in Yang (2012). This
means p is strongly problem-dependent and the user
should choose p carefully after some trial and error
tests.
In this paper, the proposed EFPA presents three
modifications in Step 4 in relation to the classical
FPA using beta probability distribution. The use of
the beta probability distribution (Ali, 2007) can be
useful to preserve diversity and helps to explore
hidden areas in the search space. The modifications
are the following:
1. The EFPA incorporates the tuning of p during the
evolutionary cycle given by:
)1.0,(5.0)
max
/(5.0 rrttp
(4)
where
)1.0,( rr
is a beta distribution probability, r
is a random number generated with uniform
distribution in range [0,1], r and
r1.0 are beat
distribution parameters (see script betarnd in
MatLab environment).
2. The EFPA uses beta distribution probability
instead of Lévy distribution (see equation (1)) to
global pollination given by:
])([)1.0,()()1( Bt
i
xrr t
i
xt
i
x
(5)
where
is a scale parameter (adopted
=1.6 in
this paper).
3. The EFPA uses beta distribution probability
instead of uniform probability distribution (see
equation (3)) to local pollination given by:
if ra > 0.7 then
1
else
5.0)
max
/(5.0
tt
end
])()([)1.0,()()1( t
k
xt
j
xrrt
i
xt
i
x
where ra is a random number generated with
uniform distribution in range [0,1] and
is a scale
parameter.
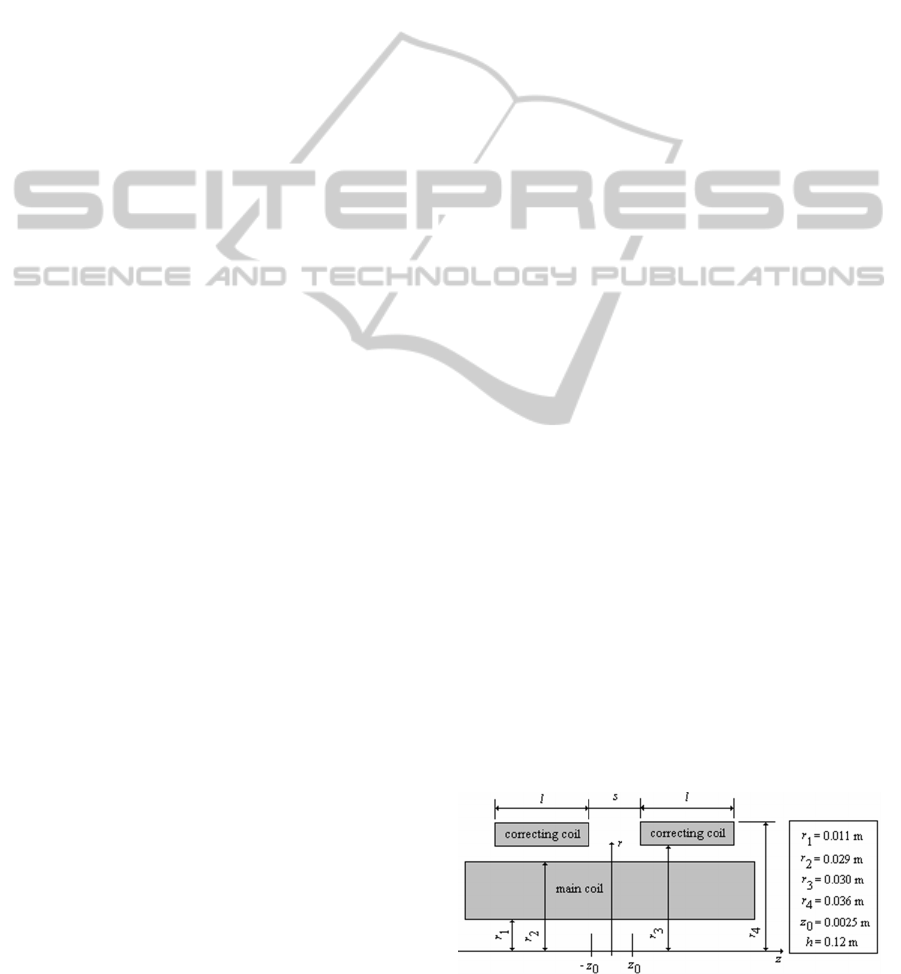
3 LONEY'S SOLENOID DESIGN
Loney’s solenoid design problem is to find the
dimensions called position (l) and size (s) of two
coils to generate possibly uniform magnetic field on
the segment (-z
0
, z
0
). This is a minimization problem
with non-analytical objective function. The box
constraints are
cm 200
s
and
.cm 200 l
The
upper half plane of the axial cross-section of the
system is presented in Fig. 1.
Figure 1: Axial cross-section of Loney’s solenoid (upper
half-plane).
EnhancedFlowerPollinationApproachAppliedtoElectromagneticOptimization
225
4 OPTIMIZATION RESULTS
In the following sub-sections, the optimization
results are presented and discussed.
4.1 Benchmark Functions Results
The performance of the EFPA and the classical FPA
has been analyzed over five benchmarks functions
(minimization problems) applied to dimension equal
to 10. The optimization methods, EFPA and FPA,
were employed using the following parameter
settings: population size equal to 50 flowers and the
stopping criterion is 2,000 generations.
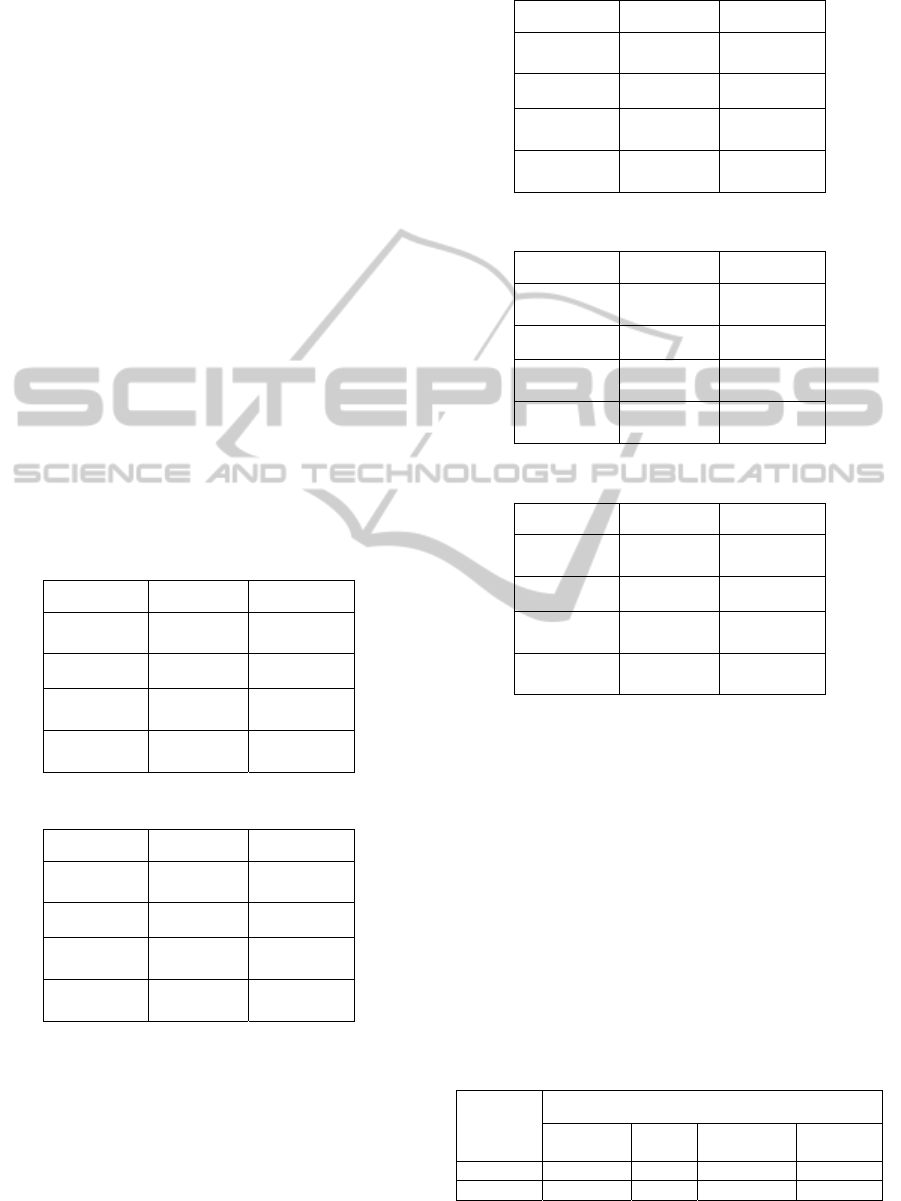
Fifty independent runs of each algorithm on each
problem are taken. The minimum, maximum, mean
and the standard deviation of the best objective
function values (50 runs) are presented in Tables 1-
5. Best entries have been marked in boldface in
Tables 1-5. A closed look in Tables 1-5 reveals that
the EFPA has the ability to avoid local optima and it
presents superior performance when compared with
the FPA. However, FPA presents a promising
performance in the Griewank case.
Table 1: Results of f
1
(Rastrigin function).
Index FPA EFPA
Maximum
(Worst)
35.81 8.19×10
-12
Mean 19.44
2.22×10
-13
Minimum
(Best)
3.98
0
Standard
Deviation
7.61 1.17×10
-12
Table 2: Results of f
2
(Ackley function).
Index FPA EFPA
Maximum
(Worst)
6.28 8.99×10
-13
Mean 3.31
1.07×10
-13
Minimum
(Best)
4.93×10
-12
7.99×10
-15
Standard
Deviation
1.44 1.71×10
-13
4.2 Loney’s Solenoid Results
We used the following parametric setup for tested
FPA and EFPA to optimize the Loney’s solenoid
benchmark problem (with dimension equal to 2):
population size equal to 20 flowers and the stopping
criterion is 150 generations. In particular, three
Table 3: Results of f
3
(Sphere function).
Index FPA EFPA
Maximum
(Worst)
100 0
Mean 140
0
Minimum
(Best)
0 0
Standard
Deviation
35.05 0
Table 4: Results of f
4
(Griewank function).
Index FPA EFPA
Maximum
(Worst)
6.65×10
-1
7.40×10
-3
Mean 2.19×10
-1
6.57×10
-4
Minimum
(Best)
3.94×10
-2
0
Standard
Deviation
1.42×10
-1
2.05×10
-3
Table 5: Results of f
5
(Rosenbrock function).
Index FPA EFPA
Maximum
(Worst)
408.49 1.29
Mean 31.22
6.18×10
-2
Minimum
(Best)
1.86×10
-2
6.15×10
-6
Standard
Deviation
69.57 1.99×10
-1
different basins of attraction of local minima can be
recognized in the domain of f with values of f>4·10
-8
(high level region), 3·10
-8
< f < 4·10
-8
(low level
region), and f < 3·10
-8
(very low level region –
global minimum region) (Coelho and Alotto, 2007).
Table 6 summarizes the optimization results of
FPA and EFPA. A result with boldface means the
best values in terms of minimum and mean values in
f found in Table 6.
As seen from Table 6, EFPA outperforms FPA
clearly. The best result (minimum) using EFPA
presented f = 2.0666·10
-8
with s = 11.6013 cm and
l=1.5110 cm. On the other hand, the best f using
FPA was with s = 12.3459 cm and l = 2.0691 cm.
Table 6: Results of Loney’s solenoid problem.
F(s, l)·10
-8
Approach
Maximum
(Worst)
Mean
Minimum
(Best)
Standard
Deviation
FPA 3.9526 3.4920 2.2524 0.5259
EPFA 3.9952
3.0206 2.0666
0.6098
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
226

5 CONCLUSION
Although during the last years, research on and with
swarm intelligence has reached an impressive state,
there are still many open problems, and new
application areas are continually emerging for the
optimization paradigms.
We undertook a comparative study of EFPA with
classical FPA over a test-suite comprising 5 well-
known numerical benchmarks and the Loney’s
solenoid problem. Our simulation results indicate
that the EFPA remains always better than FPA. In
near future, we are planning to compare the EFPA
with good performing algorithms available in
literature, such differential evolution and covariance
matrix adaptation evolution strategy.
REFERENCES
Abdel-Raouf, O., El-Henawy, I., Abdel-Baset, M. (2014).
A novel hybrid flower pollination algorithm with
chaotic harmony search for solving Sudoku puzzles,
International Journal of Modern Education and
Computer Science, 3: 38-44.
Ali, M. M. (2007). Synthesis of the β-distribution as an aid
to stochastic global optimization. Computational
Statistics & Data Analysis, 52(1): 133-149.
Ciuprina, G., Ioan, D., and Munteanu, I. (2002). Use of
intelligent-particle swarm optimization in
electromagnetics. IEEE Transactions on Magnetics
38(2): 1037-1040.
Coelho, L. S. and Alotto, P. (2007). Loney’s solenoid
design using artificial immune network with local
search based on Nelder-Mead simplex method,
COMPUMAG, Aachen, Germany.
Coelho, L. S., Guerra, F. A., Batistela, N. J., and Leite, J.
V. (2013). Multiobjective cuckoo search algorithm
based on Duffing’s oscillator applied to Jiles-Atherton
vector hysteresis parameters estimation. IEEE
Transactions on Magnetics 49: 1745-1748.
Dorigo, M. and Stützle, T. (2004). Ant colony
optimization, MIT Press.
Di Barba, P. and Savini, A. (1995). Global optimization of
Loney’s solenoid by means of a deterministic
approach. International Journal of Applied
Electromagnetics and Mechanics 6(4): 247-254.
Eberhart, R. C., Shi, Y., and Kennedy, J. (2001). Swarm
intelligence. The Morgan Kaufmann Series In
Evolutionary Computation.
Engelbrecht, A. P. (2007). Computational intelligence: an
introduction, 2nd edition, John Wiley & Sons Ltd.,
New York, USA.
Fernández, V. A., Galetto, L., and Astegiano, J. (2009).
Influence of flower functionality and pollination
system on the pollen size-pistil length relationship.
Organisms Diversity & Evolution 9(2): 75-82.
Gandomi, A. H. and Yang, X. -S. (2014). Chaotic bat
algorithm. Journal of Computational Science 5(2):
224-232.
Gandomi, A. H., Alavi, A. H. (2012). Krill herd: a new
bio-inspired optimization algorithm. Communications
in Nonlinear Science and Numerical Simulation
17(12): 4831-4845.
Karaboga, D. (2005). An idea based on honey bee swarm
for numerical optimization. Technical Report-TR06,
Erciyes University, Engineering Faculty, Computer
Engineering Department, Turkey.
Kasinger, H., Vauer, B. (2006). Beyond swarm
intelligence: building self-managing systems based on
pollination. GI Jahrestagung 1 93, LNI, 169-176.
Kaur, G., Singh, D. (2012). Pollination based optimization
for color image segmentation. International Journal of
Computer Engineering & Technology 3(2): 407-414.
Lévy, P. (1925). Calcul des probabilites. Gauthier Villars,
Paris, France.
Nolan, J. P. (2010). Stable distributions: models for heavy
tailed data, Birkhauser, Boston, USA.
Weng, L., Liu, Q., Xia, M., Song, Y. D. (2014). Immune
network-based swarm intelligence and its application
to unmanned aerial vehicle (UAV) swarm
coordination. Neurocomputing 125: 134-141.
Yang, X. -S. (2010). A new metaheuristic bat-Inspired
algorithm. In: Gonzalez J. R. et al. (editors). Nature
Inspired Cooperative Strategies for Optimization
(NISCO 2010). Berlin: Springer, 65-74.
Yang, X. -S. (2009). Firefly algorithms for multimodal
optimization. Stochastic Algorithms: Foundations and
Applications, SAGA. Lecture Notes in Computer
Sciences vol. 5792, 169-178.
Yang, X. -S. (2012). Flower pollination algorithm for
global optimization. Unconventional Computation and
Natural Computation, Lecture Notes in Computer
Science, vol. 7445, 240-249.
EnhancedFlowerPollinationApproachAppliedtoElectromagneticOptimization
227
