
Image Stitching with Efficient Brightness Fusion
and Automatic Content Awareness
Yu Tang and Jungpil Shin
Graduate School of Computer Science and Engineering, The University of Aizu, Tsuruga, Ikki-machi,
Aizuwakamatsu City, 965-8580, Fukushima, Japan
Keywords: Image Stitching, Brightness Fusion, Content Awareness.
Abstract: Image Stitching, also be called photo stitching, is the process of combining multiple photographic images
with overlapping fields of view to produce a segmented panorama or high-resolution image. Image stitching
is challenging in two fields. First, the sequenced photos taken from various angles will have different
brightness. This will certainly lead to a un-nature stitched result with no harmony of brightness. Second,
ghosting artifact due to the moving objects is also a common problem and the elimination of it is not an easy
task. This paper presents several novel techniques that make the process of addressing the two difficulties
significantly less labor-intensive while also efficient. For the brightness problem, each input image is
blended by several images with different brightness. For the ghosting problem, we propose an intuitive
technique according to a stitching line based on a novel energy map which is essentially a combination of
gradient map which indicates the presence of structures and prominence map which determines the
attractiveness of a region. The stitching line can easily skirt around the moving objects or salient parts based
on the philosophy that human eyes mostly notice only the salient features of an image. We compare result of
our method to those of 4 state-of-the-art image stitching methods and it turns out that our method
outperforms the 4 methods in removing ghosting artifacts.
1 INTRODUCTION
Image stitching could be widely used in a lot of
fields. One striking application of image stitching is
that, it has been used extensively in panoramic
photography. Image stitching method helps the
panoramic photography to capture images with
elongated fields of view. Photographers need to
assemble multiple images of a view into a single
wide image. Crude form of image stitching could be
only the image matching and then registration
(Baumberg, 2000; Brown, 1992; Brown, et al., 2004;
Brown et al., 2005), the stitched result would be
very unsatisfactory since the seam area will always
be blurring. So image blending is crucial in solving
this problem. The purposes of image blending as
reflected in the pertinent literatures can be grouped
as follows in our opinion: (1) de-blurring in the seam
area. (Azzari and Bevilacqua, 2006; Jia and Tang,
2008; Brown and Lowe, 2007). Blurring is usually
resulted from mismatching during the image
registration process or by parallax. (2) de-ghosting.
Ghosting artifacts is due to the moving objects or
scene movements (Tang and Jiang, 2009; Uyttedaele
and Eden, 2001; Yeh and Che, 2008; Yingen, 2009;
Yao, 2008; Tang and Shin, 2010). (3) Eliminating
visible seam. Visible seam is due to the various
image brightness (Jia and Tang, 2008; Allene and
Pons, 2008; Yeh and Che, 2008; Yao, 2008; Levin
and Zomet, 2004). For the problem of brightness
fusion, Burt (Burt et al., 1993) proposed to use
image fusion to create a high quality image from
bracketed exposures. But the measures could not be
adjusted as flexible as our method. Tone mapping
operators is applied spatially uniform remapping of
intensity to compress the dynamic range (DiCarlo
and Wandell, 2000; Drago et al., 2003; Fattal et al.,
2002; Reinhard et al., 2002; Tumblin and
Rushmeier, 1993). Their main merits are speed but
difficult to produce a satisfactory image. A pyramid
image decomposition method has been proposed by
Li (Li et al., 2005) and attenuate the coefficients of
the different exposures at each level to compress the
dynamic range. Our method is also based on
pyramid decomposition but works on the
coefficients of the different brightness.
60
Tang Y. and Shin J..
Image Stitching with Efficient Brightness Fusion and Automatic Content Awareness.
DOI: 10.5220/0005087200600066
In Proceedings of the 11th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2014), pages 60-66
ISBN: 978-989-758-046-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure1: General architecture of the proposed method.
Figure 2: 1st row and 2nd row are a group of images taken
under different exposure for left scene and right scene
respectively. The last row is about the fused results for the
sequenced images in the 1st row and 2nd row.
For the problem of de-ghosting, although existing
image studies are various and have different focuses
but not many specialized in eliminating the ghosting.
A tonal registration method (Azzari and Bevilacqua,
2006) which is robust to moving, however, this
works only when the presence of same moving
objects in consequent frames which will not alter the
overall histogram.
Uyttedaele (Uyttedaele and Eden, 2001) presents
a weighted vertex cover algorithm to remove ghost
effects, yet, this method is not failsave. Since the
algorithm only prefers removing regions that are
near the edge of the image because the vertex
weights are computed by summing the feather
weights in the ROD (Uyttedaele and Eden, 2001).
Multi-blending (Allene and Pons, 2008; Brown and
Lowe, 2007; Yao, 2008) is effective for de-ghosting
but not in the case of presence of so many moving
objects. Stitching line method conceived in (Tang
and Jiang, 2009; Han and Lin, 2006) is good but
cannot always find a satisfactory stitching line. Our
paper still adopts stitching line method but the
distinct feature is that our method can detect the
prominent objects with automatic-awareness and
thus can always search out an optimal stitching line
to remove ghosting with least distortion.
2 BRIEF GENERAL SCHEME
The scheme presented here is quite a simple while
efficient architecture for tackling the two tough
problems: brightness variance and ghosting artifacts.
Step1: Brightness fusion. Considering that
brightness variance always occurs when taking
multiple photos, especially in outdoor because if the
camera is back to Sunshine, image will be so dark.
Otherwise, image will be so bright. We take multiple
photos with different exposure (automatically set by
camera with different exposure parameters) for each
scene and then fuse the multiple photos to one image
with appropriate brightness.
Step2: In this paper, we skip explaining the
image matching part and registration part. SIFT
feature based image matching (Baumberg, 2000;
Brown, 1992; Brown et al, 2004; Brown et al., 2005)
is already a very mature and efficient method for
image registration. For blending and deghosting (In
the left image, there is a car. While in right image,
there is no car. We need to eliminate the ghosting
artifact) in the seam area, we present an intuitive
technique for finding an optimal stitching line which
is automatically aware of the content and thus skirts
around the salient objects. And then stitch the
images according to this stitching line. The
preciseness of the salient object awareness is
satisfactory. We could see this in the experiment
section.
3 BRIGHTNESS FUSION
There are multiple images taken with different
exposure for each same scene. And we assume that
the images are perfectly aligned. To achieve that, we
need to be sure that the position of the camera
should be fixed or there will be no any parallax
movement of the camera. If it is unavoidable, we
should possibly use a registration algorithm (Ward,
2003).
The fusion methods we propose will kick out
bad parts and keep only the “best” parts in the
multiple-brightness image sequence.
ImageStitchingwithEfficientBrightnessFusionandAutomaticContentAwareness
61

Figure 3: (a) and (b) are the two input images, (c) is image stitching result generated by feathering method (Uyttedaele and
Eden, 2001). (d) multi-band method (Brown et al., 2007) € structure deformation method (Jia and Chi-Keung, 2008). The
orange line indicates the shape of the traffic way is bent to curve. (f) to (h) is for our previous work (Yu and Huiyan,
2009)where subtracted image (f) shows the stitching line calculated by gradient map (g) and (h) is the stitching result. (i) to
(k) is for the method of this work where subtracted image (i) shows the stitching line calculated by improved energy map (j)
and (k) is the stitching result. Our result (k) shows the best.
We set three Brightness measures and make a
weight map. Based on this weight map, we do the
weighted blending of the multiple images.
3.1 Brightness Measures
To measure the images in the stack is well exposed
or not, we apply the following measures to assign
the weight. The regions in the image is under or
overexposed, should receive less weight, while the
area containing bright color should be preserved.
Exposedness (Measure E): Within the a channel we
weight each intensity i based on how close it is to
0.5 using a Gauss curve:
expi 0.5^2/2σ^2
We apply the Gauss curve to each channel
separately.
Figure 4: (a) Tentative detection based on global contrast.
(b) The prominence detection based on local contrast of an
image region with respect to its neighborhood is defined
within a circle of radius r. (c) Filtering the images at one
of the scales in rotate-expanding manner.
Contrast (Measure C): Each image will be applied
a Laplacian filter and take the absolute value of the
filter response. Because of Laplacian filter, it will
assign a high weight to salient parts such as edges.
Saturation (Measure S): According to the
photographing experience, the color will be
desaturated if the photo is exposed for a long time.
We get a saturation measure by computing the
standard deviation within the R, G and B channel at
each pixel.
We combine the measures in a linear form using a
power function to get a weight map:
,
,
,
,
(1)
ω
,ω
,ω
is the weighting exponents of measure
C, S, E. The subscript i, j, k refers to pixel i, j in the
k-th image. If the exponent ω is zero, this measure
will not be taken into account.
3.2 Laplacian Pyramid Fusion
Given the sequenced images
,
, we could get the
fused image I by a weighted blending of the input
images:
,
∑
,
,
(2)
with
the k-th input image in the sequence.
However, applying formula 2 immediately will lead
to disturbing seams. It is because the images we are
combining contain different absolute intensities due
to their exposure times. To address the seam
problem, we use the technique inspired by Burt and
Adelson, their technique blends two images
seamlessly by an alpha mask and use a pyramid
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
62
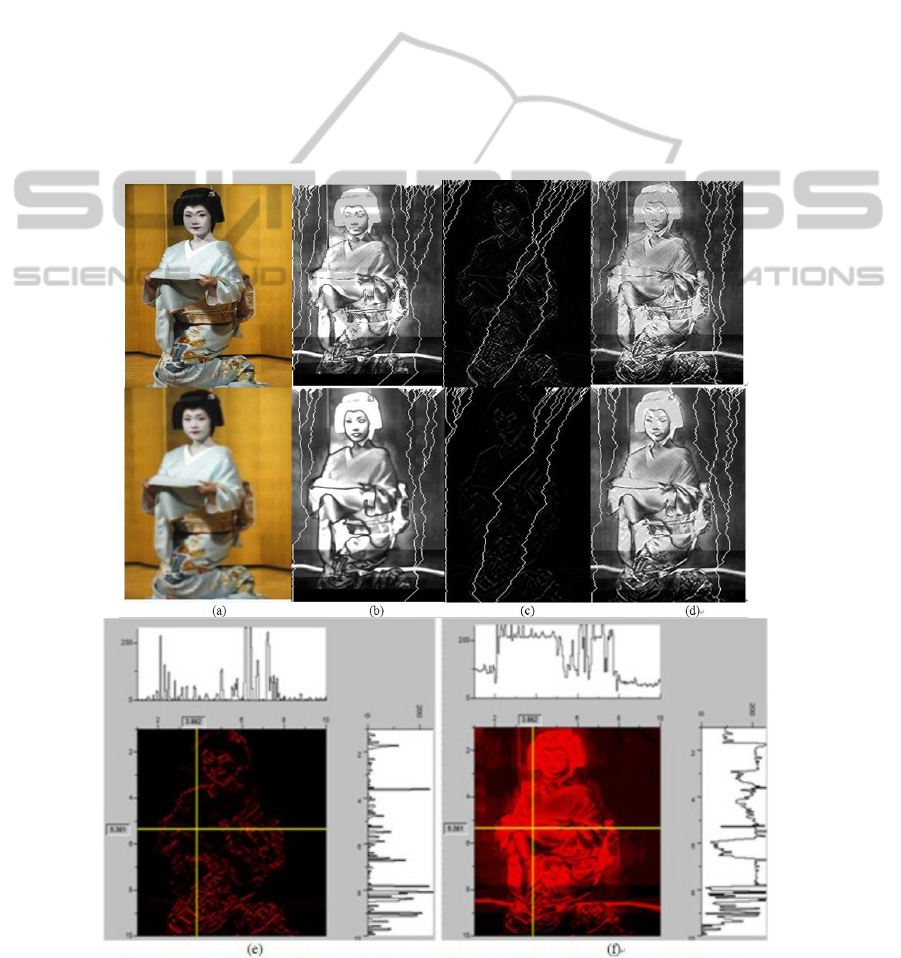
image decomposition. This multi-resolution
blending is quite effective in avoiding seams. We
also adapt this technique to our cases.
As seen from the Fig.2, we take three images of
different exposure for the left scene and right scene
in the first row and second row. We take the images
with highly exposure and middle exposure and low
exposure. We take the images in winter and it is a
dark day, so even under middle exposure, the image
is darker than usual. Using the fusion method
described above, we get the fused results I1,I2 in the
last row for left scene and right scene respectively.
We could see that the fused results are quite
satisfactory.
4 PRELIMINARIES FOR
STITCHING AND BLENDING
Given two input images I
,I
in Fig.3(a) and (b),
after registration we get an aligned image. We define
the part of Image I
in the overlap region as θ
(the
part of I
asθ
,respectively). The subtraction
between two images θ
(x, y) and θ
(x, y) in R, G, B
channel, expressed as:
θ
x, y
θ
x, y
θ
x, y
,i ∈ R,G, B
(3)
The subtracted image θ is shown in Fig.1(f) and
(i) with no green stitching line. In order to remove
the ghosting effects we target on searching a
stitching line in θ which can intelligently go around
the contour of the car. And stitch the two images
according to this line.
Figure 5: Column (a) shows original (above and noise version (below) of the image. Column (b)(c)(d) shows several less
energy stitching lines calculated on prominence map, gradient map, improved energy map. (e) and (f) are profiles of
gradient map and improved energy map respectively.
ImageStitchingwithEfficientBrightnessFusionandAutomaticContentAwareness
63

5 IMPROVED ENERGY MAP
Although (Tang and Jiang, 2009; Xiong, 2009;
Levin and Zomet; 2004) shows that the gradient
enjoys the advantage of respecting structures within
the image thanks to assigning higher value on edges,
the demerit lies in the gradient magnitude can be
misled by trivial and repeated structures and salient
objects are not well detected. In our improved
energy map, we combine it with prominence map
which considers the regions that are attractive but
homogeneous as salient. Based on that, an optimal
stitching line can always be found out for de-
ghosting.
5.1 Prominence Map
1) Tentative Detection: To begin with, we roughly
determine the prominence by evaluating the
Euclidean distance of the average Lab vector value
of an input image with each pixel vector value as:
,
(4)
where Gx, y is the input image, G
is the average
of all Lab pixel vectors of the image, E
,
is the
pixel prominence at position (x,y). We use the Lab
space instead of RGB space since RGB space does
not take lightness of the color into consideration.
Also Lab space also has advantage of approximating
human vision and aspiring to perceptual uniformity.
When E
x, y > T (a threshold value), we impose
a mark (shown as the green blocks in Fig.2(a) on
that pixel which signifies that this pixel might be of
importance since it keeps a large distance from the
other pixels in the whole image. So in this stage, the
prominent pixels are only tentatively identified.
2) Circular Scanning: Last stage, the tentative
detection is based on the global contrast of the
image. In this stage, we determine the prominent
pixels on the basis of the local contrast of an image
region with respect to its neighborhood. Thereby, we
define a pixel as origin O(x, y) and designate its
neighborhood as a circular region with radius r
around it shown as Fig4.(b). The orange block is the
origin O(x, y) while the blue blocks enclosed or
passed by the orange circle are the neighborhood of
origin O. The neighborhood is (2r+1)×(2r+1) block
region in practical terms. The prominence of the
origin O is evaluated as:
As a result, we observed how much educational
effect about learning dictation and stroke order was
emerged from this experiment and how much
differences by learning process can be found.
, ∈
1,2,3
(5)
where
represents the mean vector value of the
neighboring pixels within the circular region with
radius r in Lab space while v(O) denotes the vector
value of origin.
is still the
-norm
measured by Euclidean distance. Parameter i
indicates that the prominence of the pixel is in which
scale. We will calculate the prominence at three
scales in total.
is simply computed as :
∑
(6)
where N is the total pixels of the neighborhood. The
filtering is performed in a rotate-expanding manner
as Fig.4(c) shown.
5.2 Comparison and Analysis
As shown in Fig. 5 column (a), given an original
image (first row) and its Gaussian twice-blurred
version(using 3×3 binomial kernel) in the second
row. We explore the stitching lines within
prominence map, gradient map, improved energy
map and in the column (b)(c)(d), respectively.
It is obvious that prominence map and improved
energy map protect the whole body of geisha against
the passing of stitching lines very well. What is
more, the two maps verify their robustness to the
very noise. In contrast, the gradient map shows far
worse results in the two versions since the stitching
lines are either clustered to one side or just cross the
body of geisha. Let us identify the reason for
gradient map’s failure of protecting the salient
objects by comparing the profiles of the three maps
in both local and global manner as Fig. 5(e) to (f).
First, the colored energy maps of prominence map
and improved energy map present that quite a bit of
pixels with high visual significance (prominent
pixels are marked in red) are distributed in the
region of geisha evenly, while gradient map only
assigns visual importance to the edges or trivial
structures.
In other words, the amount of significant pixels
is too few to protect the salient object. Assuming
our stitching lines are horizontal or vertical straight
lines as shown in the colored energy map. The top
and right line charts showing the value of each pixel
of the corresponding position in the horizontal and
vertical stitching lines, respectively. Apparently the
energy of stitching lines in the prominence map and
improved energy map are much higher and more
uniform than that in the gradient map. To fix the
intractable problem of ghosting, safeguarding single
salient object is far insufficient, our improved energy
map is also very effective for protecting multi-
objects.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
64

6 EXPERIMENTAL RESULTS
We demonstrate our method capable of generating
natural image stitching results for presence of either
single moving object or multi-moving-objects.
Comparison with other methods is also given.
In, Fig.3, (a) and (b) show two overlapped
images of an automobile ambulation scene. Ghosting
artifact is obvious in (c) using the Feathering
algorithm (Uyttedaele and Eden, 2001). (d) use the
multi-blend algorithm and presents a much better
result than (c). Nevertheless, apparent blurring
displays in the vincinity of car’s head. At first sight,
(e) is a good stitched mosaic, however, it is not a
true reflection of input pictures since the original
straight shape of the motor way is bent to a curve
due to the deformation method in (Jia and Tang,
2008). (h) is the result of (Tang and Jiang, 2009)
based on gradient map. Due to the stitching line’s
failure of avoiding the prominent object, a small
fraction of car is remained. (k) shows the best result
using our improved energy map(j) and stitching line
(i).
7 CONCLUSION
In this work, we propose a simple while efficient
framework to solve two difficult problems,
brightness overexposed or underexposed and
ghosting artifacts. To solve the problem of
brightness, we take 3 pictures of the scene under
different exposure, and pick good parts of each
picture to be fused to the final result. The criteria for
good or not is flexible and adjustable. It is mainly
based on the measure of color, saturation, contrast.
The number of input pictures is not limited to 3.
More is welcome to enrich the fused details. We
could see that our method works effectively in
brightness fusion in experiment section. To eliminate
ghosting artifacts, we present a novel energy map for
finding an optimal stitching line which is
automatically aware of the content and thus skirts
around the salient objects. Since the energy map is
essentially a combination of gradient map and
prominence map which assigns higher importance to
whole visually prominent regions (not only edges),
the stitching line can easily skirt around the moving
objects. The result section demonstrates that our
method is better than the other four state-of-the-art
(Azzari and Bevilacqua, 2006; Jia and Tang, 2008;
Tang and Jiang, 2009; Brown and Lowe, 2007)
techniques for de-ghosting.
REFERENCES
P. Azzari and A. Bevilacqua. Joint spatial and tonal
mosaic alignment for motion. Proceeding on AVSS
2006, pp.89–102, Nov. 2006.
Jia jia, Chi-Keung Tang. Image stitching using structure
deformation. Pattern Analysis and Machine
Intelligence IEEE Transactions. 30(4):617-631, Apr.
2008.
Yu Tang, Huiyan Jiang. Highly efficient image stitching
based on energy map. CISP’09 , pp.1-5, Oct. 2009.
Allene, C, Pons, J. Seamless image-based texture atlases
using multi band blending. ICPR 2008, pp.1-4,
Dec,2008
Han,B, Lin, X. A novel hybrid color registration algorithm
for image stitching. Consumer Electronics, IEEE
Transcations, 52(3):1129-1134, Aug. 2006
M.Brown, D.G. Lowe. Automatic panoramic image
stitching using invariant features. International
Journal of Computer Vision, Pp. 59-73, August. 2007
M.Uyttedaele, A.Eden. Eliminating ghosting and
exposure artifacts in image mosaics. CVPR2001,
pp.509-516, Dec.2001.
Tien-Der Yeh, Yon-Ping Che. An image stitching process
using band-type optimal partition method. Asian
Journal of Information Technology, 7(11):498-509,
2008.
Xiong, Yingen. Eliminating ghosting artifacts for
panoramic images. ISM’09 pp: 14-16, Dec. 2009
Li Yao. Image mosaic on SIFT and deformation
propagation. Knowledge Acquisition and Modeling
Workshop, 2008, pp: 848-851, Dec. 2008.
Anat Levin, Assaf Zomet. Seamless image stitching in the
gradient Domain. ECCV 2004, pp:377-389,May.2004
Baumberg, A. (2000). Reliable feature matching across
widely separated views. In IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition (CVPR’2000), pages 774–781, Hilton
Head Island.
Brown, L. G. (1992). A survey of image registration
techniques. Computing Surveys, 24(4), 325–376.
Brown, M., Szeliski, R., and Winder, S. (2004). Multi-
Image Matching Using Multi-Scale Oriented Patches.
Technical Report MSR-TR-2004-133, Microsoft
Research.
Brown, M., Szeliski, R., and Winder, S. (2005). Multi-
image matching using multi-scale oriented patches. In
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition(CVPR’2005), pages
510–517, San Diego, CA
P. J. Burt, K.Hanna, and R.J. Kolczynski. Enhanced image
capture through fusion. In Proceedings of the
Workshop on Augmented Visual Display Research,
pages 207-224. NASA-Ames Research
Center.,Dec.1993.
J. DiCarlo and B. Wandell. Rendering high dynamic range
images,. In Proceedings of SPIE, volume 3965, Jan.
2000.
F. Drago, K. Myszkowski, T. Annen, and N. Chiba.
Adaptive logarithmic mapping for displaying high
ImageStitchingwithEfficientBrightnessFusionandAutomaticContentAwareness
65

contrast scenes. Computer Graphics Forum, 22:419–
426, 2003.
R. Fattal, D. Lischinski, and M. Werman. Gradient domain
high dynamic range compression. ACM Transactions
on Graphics, 21(3):249–256, July 2002.
E. Reinhard, M. Stark, P. Shirley, and J. Ferwerda.
Photographic tone reproduction for digital images.
ACM Transactions on Graphics, 21(3):267–276, July
2002.
J. Tumblin and H. E. Rushmeier. Tone reproduction for
realistic images. IEEE Computer Graphics and
Applications, 13(6):42–48, Nov. 1993.
Y. Li, L. Sharan, and E. H. Adelson. Compressing and
companding high dynamic range images with subband
architectures. ACM Transactions on Graphics,
24(3):836–844, Aug. 2005.
G. Ward. Fast, robust image registration for compositing
high dynamic range photographcs from hand-held
exposures. Journal of Graphics Tools: JGT, 8(2):17–
30, 2003.
Yu Tang, Jungpil Shin. De-ghosting for Image Stitching
with Automatic Content-Awareness. Pattern
Recognition (ICPR), 2010 20th International
Conference on 23-26 Aug. 2010 2210 – 2213.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
66
