
Developing a Novel fMRI-Compatible Motion Tracking System
for Haptic Motor Control Experiments
M. Rodríguez
1
, A. Sylaidi
1
and A. A. Faisal
1,2
1
Brain and Behaviour Lab, Department of Bioengineering, Imperial College London, London, U.K.
2
Brain and Beahvioural Lab, Department of Computing, Imperial College London, London, U.K.
Keywords: fMRI, Motion Tracking, Low Cost, Object Manipulation, Neuroimaging.
Abstract: Human neuroimaging can play a key role in addressing open questions in motor neuroscience and embodied
cognition by linking human movement experiments and motor psychophysics to the neural foundation of
motor control. To this end we designed and built fMOVE, an fMRI-compatible motion tracking system that
captures 3DOF goal-directed movements of human subjects within a neuroimaging scanner. fMOVE
constitutes an ultra-low-cost technology, based on a zoom lens high-frame rate USB camera and, our
adaptation library for camera-based motion tracking and experiment control. Our motion tracking algorithm
tracks the position of markers attached to a hand-held object. The system enables to provide the scanned
subjects a closed-loop real time visual feedback of their motion and control of complex, goal-oriented
movements. The latter are instructed by simple speed-accuracy tasks or goal-oriented object manipulation.
The system’s tracking precision was tested and found within its operational parameters comparable to the
performance levels of a scientific grade electromagnetic motion tracking system. fMOVE thus offers a low-
cost methodological platform to re-approach the objectives of motor neuroscience by enabling ecologically
more valid motor tasks in neuroimaging studies.
1 INTRODUCTION
On a daily basis, humans acquire new motor skills or
enhance their performance on already encountered
motor tasks. Occasionally, they may also re-acquire
skills, which are difficult to perform or cannot be
executed because of injury or disease. The motor
learning experience in all these cases involves a
number of different processes, which support motor
behaviour through interacting and/or hierarchical
roles.
At the level of information extraction, skilled
performance is based on the efficient gathering of
information from the environment. Humans use task
dependent attentional mechanisms to actively select
(Friston, Daunizeau, and Kiebel, 2009; Friston,
2010) and integrate multisensory stimuli. They
uncover the dynamics of a task by learning key
properties of their body and the world (Faisal Syladi
and Faisal, 2012; Brayanov, Press, and Smith,
2012). Crucially, they determine the necessary
motor commands so as to optimize their
performance according to task goals, e.g. to
minimise variability and noise (Todorov and Jordan,
2002; Todorov, 2004; Faisal and Wolpert 2009;
Faisal et al, 2008). This process ranges from high-
level decision making that dictates the structure of
an effective control policy to low-level optimization
of the execution of the selected policy.
Although motor behaviour has been
systematically studied for more than 100 years, the
mechanisms that underlie motor learning and the
formation of control policies remain unclear. A large
body of research has examined motor behaviour
through motor psychophysical experiments, which
provide insight into the patterns of adaptive
responses in tasks that introduce changes in the
target, the workspace or the force-field (Shadmehr
and Moussavi, 2000; Shadmehr and Mussa-Ivaldi,
1994; Wolpert, Diedrichsen, and Flanagan, 2011;
Faisal and Wolpert, 2009). Such studies have relied
primarily on high-resolution behavioural data and
have inspired a number of computational approaches
that describe abstract mechanisms of the interplay
between perception and action, as well as
mechanisms of generalisation of learned activity
(e.g. optimal feedback control, reinforcement
learning, Bayesian inference).
25
Rodríguez M., Sylaidi A. and Faisal A..
Developing a Novel fMRI-Compatible Motion Tracking System for Haptic Motor Control Experiments.
DOI: 10.5220/0005094700250030
In Proceedings of the 2nd International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX-2014), pages 25-30
ISBN: 978-989-758-056-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
A novel strand of research in the field has focused
on ecologically more valid tasks shifting away from
strict lab protocols and thereby enabling subjects to
move freely (within the confines of their task and
calibration) in naturalistic settings (e.g. flint stone
tool making). Such settings were used in motor
studies carried out in parallel with neuroimaging
approaches, which investigated the related demands
on the brain (e.g. Faisal et al, 2010; Hecht et al.,
2014). This work provided insight into human
natural movement statistics (Ingram et al 2008,
Faisal et al. 2010), as well as into the predictable
structure and sequence of movements with
immediate implications for Brain-Machine Interface
and prosthetic control (Thomik et al, 2013; Haber et
al 2014).
Yet despite this substantial progress in the study
and understanding of motor control processes and in
the predictability of movements, less methodological
advancement has been achieved in linking motor
psychophysics and computational models of
behaviour to their underlying neurophysiological
correlates. Brain imaging based on fMRI, one of the
predominant technological paradigms to access the
neural implementation level, has been primarily used
in studies that examine purely cognitive tasks. In the
less common cases, in which fMRI has been
employed in motor neuroscience research, the
examined functions refer to very simple, lab-
constrained movements (e.g. finger-tapping) and the
designed experiments instruct non-realistic open-
loop tasks, which do not provide any sensory
feedback of performance so as to encourage
learning. The main reason for this restriction lies in
the technical constraints, which are interwoven with
the fMRI function and which often make its use
incompatible to most advanced motion tracking
systems.
Here we designed and built an fMRI-compatible
motion tracking system that allows us to examine
how humans learn complex motor tasks. Our system,
fMOVE, constitutes a technology capable of
acquiring information about 3D motion inside an
fMRI scanner in a three-degrees-of-freedom context.
The designed platform can host closed-loop motion
studies by establishing continuous motion tracking
and providing human subjects with online virtual
feedback of their motor behaviour and performance.
fMOVE thus provides an expansion of conventional
motion tracking methods used in fMRI studies,
which are trying to improve the analysis of fMRI
data (compensation for head and/or body motion), or
to adjust the block design to the actual motion start
and pause.
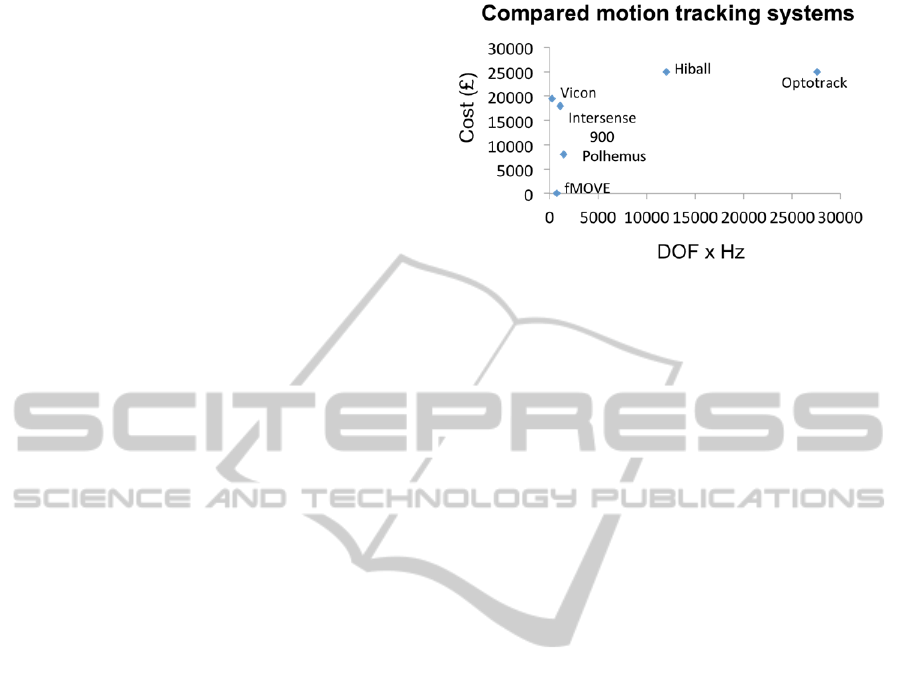
Figure 1: Comparison of fMOVE and commercial motion
tracking systems. fMOVE corresponds to the lowest cost
level and possesses motion tracking performance within
the range covered by established motion trackers (e.g.
Polhemus, Vicon). The processing power of the displayed
systems is estimated as the product of DOF and sampling
frequency (both of which should be maximised, but are
often treated as trade-offs in conventional motion tracking
systems).
At the same time fMOVE possesses motion
tracking performance in the same range as
established fMRI-incompatible motion tracking
methods (e.g. Vicon with motion tracking at 1DOF
and 250Hz, Intersense 900 at 6DOF and 180Hz,
Polhemus Liberty at 6DOF and 240Hz) and is
significantly cheaper than other fMRI-incompatible
technologies with better information processing
features (e.g. Hiball with motion tracking at 6DOF
and 2000Hz, Optotrack at 6DOF and 4600Hz, see
Fig. 1). The development of our software that
supports this platform makes use of ARToolkit, a
software library for building Augmented Reality
applications. The motion tracking setup was
developed inside a simulated fMRI environment to
match the deployment in the Clinical Imaging
Facility at Hammersmith Hospital, London.
2 MATERIALS AND METHODS
2.1 Hardware Development
Our system consists of the motion tracking
installation inside the fMRI environment and the
software that runs the experiment by adapting its
phases and provided feedback to the subject's
captured performance. In particular, subjects lay
inside the fMRI-scanner holding the fMOVE object
in their dominant hand. The fMOVE adjusted
camera is installed at the distal end of the scanner
room with its telezoom lens facing the foot-end view
of the scanner cylinder with the hand-held object
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
26
clearly visible (Fig. 2B). Camera images are
processed in real-time by a laptop-based system
which controls the experiment and can present real-
time feedback to the patient via the scanner’s visual
display setup. We used a PlayStation 3 Eye camera
(SONY, Tokyo) to track the motion of markers
attached to a hand-held object. This camera is able
to work with frame rates of 120Hz at a 320 x 240
pixel resolution and can also work with frame rates
of 60 Hz at 640 x 480 if more resolution is needed.
In addition, this device can be set for close up
framing at 56º field of view or 75º for long shot
framing. All these features provide the camera a
satisfying image acquisition quality for the needs of
our motion tracking setup. Its single component
price of 23£ (at time of printing) constitutes the sole
cost of fMOVE and therefore establishes the latter as
the cheapest 3DOF motion tracking technology
amongst a number of commercially available
systems (Fig. 1).
fMOVE’s motion tracking accuracy was tested
for 3 different camera lenses in order to examine
whether the markers are captured successfully both
for smaller and larger distances to the camera. We
selected the variable lens focal lengths taking into
account three different distances to the camera
(0.5m, 1m, 2.5m) based on:
∙
(1)
where denotes the focal length,
the width
of the CMOS sensor (3.98mm), the Field Of
View (400mm), the distance between the camera
and the tracked marker. The focal lengths for the
different distances were estimated as 6.35mm,
12mm and 35mm.
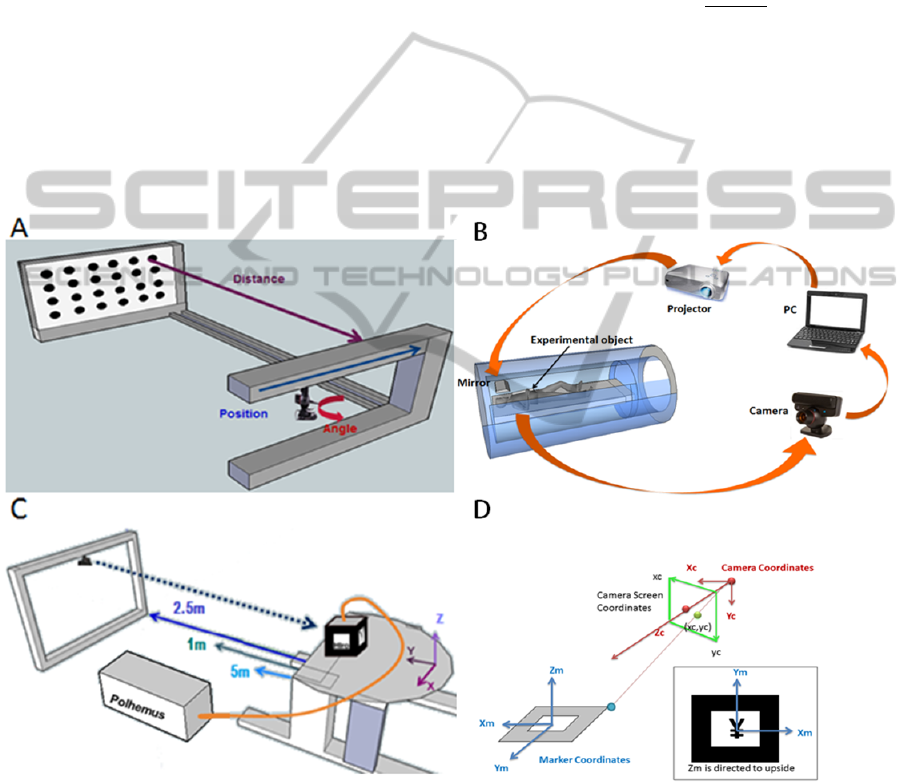
Figure 2: (A) Setup for the one-time calibration for any camera system to be used with fMOVE system. Rigid aluminium
frames allow mounting of camera and target calibration pattern at defined position and orientation. (B) fMOVE system in
use: healthy subject lying inside the fMRI-scanner holding the fMOVE object in the dominant hand. Camera installed at the
distal end of the scanner room with its telezoom lens facing the foot-end view of the scanner cylinder with the hand-held
object clearly visible. Camera images are processed in real-time by laptop-based system which controls the experiment and
can present real-time feedback to the patient via the scanner’s visual display setup. (C) Set-up to measure the motion
tracking performance of the fMOVE system against a commercial electromagnetic (i.e. non-optical) motion tracking system
used as reference gold-standard (LIBERTY polhemus). A reference fMOVE object (black cube) which contains the
magnetic motion-tracking sensor is moved at defined distances and orientations (see text for details). (D) The coordinate
systems used by fMOVE include the camera coordinates (X_C, Y_C, Z_C in red), the coordinate system of the camera
view (x_C, y_C in green) and the relative coordinates of the fMOVE object surface(s) (X_m, Y_m, Z_m in blue).
DevelopingaNovelfMRI-CompatibleMotionTrackingSystemforHapticMotorControlExperiments
27
2.2 Calibration
The camera was calibrated in a setup, which consists
of two reference planes; one marker based and one
camera based (Fig. 2A). The marker plane remained
fixed throughout the calibration whereas the camera
plane could be rotated around a reference point and
translated away from or closer to the marker plane.
The camera was positioned at a fixed height on the
camera plane and at variable distances to the camera
plane’s rotation axis. Altogether in each calibration
we tested three different camera positions with
regard to the camera plane rotation axis (11.5cm,
18.5cm, and 25.5cm), three different camera plane
rotation angles (29º, -17º, 19º or/and 65º) and three
different camera plane distances to the marker plane
(either 33cm, 49.5cm, 41cm or 56.5cm, 45cm,
37cm).
2.3 Coordinate systems
fMOVE takes three coordinate systems into account:
a camera screen based (2D), a camera based (3D)
and a marker based (3D) (Fig. 2D). The marker
coordinate system uses as reference the centre of the
marker, having
and
parallel to the borders of
the marker, and
pointing away from the marker.
The marker centre is defined as (
,
,
) =
(0,0,0). The relationship between the camera and
marker coordinate system is determined through
rotational and translational operations. In particular,
we used the following transformation, which reflects
a rotation followed by a translation:
1
0
0
0
1
∙
0
0
/2
1
(2)
where
and
determine the values of the rotation
and translation matrices respectively (Kato &
Billinghurst, 1999) and V denotes an edge of the
cubic component of the object; it has a negative sign
due to the orientation of the axes in the camera
based coordinate system.
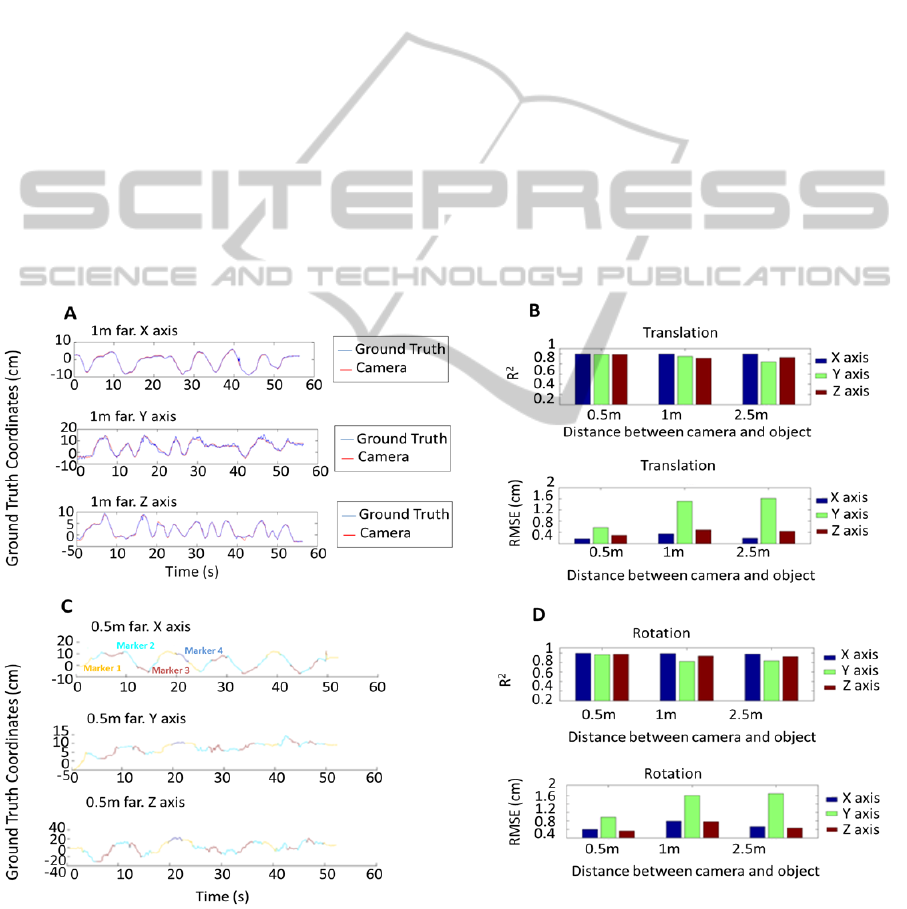
Figure 3: (A) Spatial and temporal alignment of fMOVE and Polhemus data during translational movements in the X, Y and
Z axis. (B) fMOVE and ground truth comparison based on R
2
and Root Mean Squared Error (RMSE) for translational
movements in the X, Y and Z axis. (C) Spatial and temporal alignment of fMOVE and Polhemus data during rotational
movements in the X, Y and Z axis. (D) fMOVE and ground truth (Polhemus, Liberty) comparison based on R
2
and RMSE
for rotational movements in the X, Y and Z axis.
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
28

2.4 Testing the Tracking Accuracy
In order to assess the tracking accuracy of fMOVE,
the system was compared with Polhemus Liberty, a
commercial electromagnetic motion tracker (Fig.
2C). One Polhemus sensor was positioned exactly
in the centre of an exemplary multi-marker object.
The designed object was free of metal so as to suit
usage inside the fMRI scanner. It consisted of a
wooden handle and a plastic cube at the surfaces of
which we attached four different ARToolkit
compatible markers. These markers can be
identified by the image-processing algorithm of our
system and assigned to a different label according
to the pattern they display. Labelling the different
patterns enabled the identification of rotational
movements.
In this setup, the object’s 3D position could be
tracked simultaneously by the calibrated camera of
fMOVE and the electromagnetic sensor. The two
streams of motion data were subsequently
compared after their respective reference coordinate
systems were aligned. The estimated error between
them was used as a performance measure for
fMOVE’s motion tracking accuracy in translational
and rotational movements of the object.
Translational movements were constrained
between the borders of a specified workspace.
During translation, the camera was always tracking
the same face and consequently the same marker on
the object. On the other hand, during rotational
movements within the same workspace borders, the
system’s motion tracking switched between the
different markers positioned on the object surfaces.
3 RESULTS
We assessed the tracking accuracy of fMOVE by
testing its position measurements against a widely
used electromagnetic motion tracker (Polhemus
Liberty). The comparison was performed for three
different distances between camera and object plane
(0.5m, 1m and 2.5m). For each of these three cases
we tested 15 trials of pre-specified motor tasks. In
10 of these the object was translated and in the
remaining 5 it was rotated.
After temporally and spatially aligning the
position measurements of the marker-based fMOVE
and the sensor-based Polhemus Liberty, we noticed
that our motion tracking system acquires data
streams that accurately match our ground truth. This
matching is evident in the overlaid position plots for
both translational and rotational trials (Fig. 3A,C).
In fact, during rotational movements fMOVE
manages to efficiently avoid tracking omissions, by
switching from one marker to another (as is evident
in the color-coding of Fig. 3).
Two measures of comparison of the acquired
data streams (R
2
and RMSE) verify the efficiency
of fMOVE in motion tracking (Fig. 3B,D). In
translational movements R
2
reflects over 84%
accuracy for all tested distances between camera
and tracked object. The lowest R
2
level (R
2
= 0.846)
is estimated for the largest distance (2.5 m) in the y-
dimension. The same case produces the highest
RMSE (RMSE = 1.6181 cm). Throughout all cases,
the y-dimension produces the highest error levels,
which reflects the fact that fMOVE is mostly
sensitive along the axis that connects the camera
centre with the marker centre. Even these instances
however, do not significantly affect the R
2
levels as
displayed in Fig. 3B.
Similarly, in rotational movements our
assessment verifies a matching between the
measurements of our system and the ground truth.
The lowest R
2
level (R
2
= 0.8214) is estimated again
for the largest distance (2.5 m) in the y-dimension
(Fig. 3C) for which the corresponding RMSE =
1.6181cm (Fig. 3D). As in the translational
movements, the largest tracking errors here are
noted again in the y-dimension. It is thus evident
that fMOVE displays its highest sensitivity in the y-
direction for a broader range of movements.
4 DISCUSSION
Based on our experience in designing extremely
affordable Neurotechnology for eye-tracking
(Abbott and Faisal, 2012, Abbott et al, 2013),
wearable motion tracking and muscle signal
systems (Gavriel et al. 2013, Fara et al. 2013), we
now designed and built fMOVE, a first low-cost
fMRI-compatible marker-based motion tracking
system capable of capturing 3 DOF movement. The
system acquires behavioral data from subjects,
while they manipulate a marked object inside an
fMRI scanner and it provides to them online visual
feedback of motion and task performance.
We tested the efficiency of the system against
Polhemus Liberty, a commercial electromagnetic
motion tracker, which operates with high accuracy
at 240 updates per second. We found that fMOVE
achieves high tracking accuracy for both
translational and rotational movements of the
markers and preserves this accuracy for variable
distances of the camera to the moving object.
DevelopingaNovelfMRI-CompatibleMotionTrackingSystemforHapticMotorControlExperiments
29

fMOVE poses technical advantages since it allows
high frequency data acquisition inside the fMRI
environment which is commonly incompatible to all
widely used motion tracking technologies, due to
the applied magnetic field. Our system is amenable
to further customization depending on the needs of
the experimental study, designed to be carried out
inside the scanner. Such customization can include
developing a multiple-marker tracking algorithm, so
as to increase the motion tracking accuracy, avoid
false marker detections and cover the motion of
multiple body parts or more complex behavioural
tasks.
Importantly, apart from its compatibility to the
fMRI environment, fMOVE constitutes an ultra-
low-cost motion tracking technology, that limits
expenses to the price of the used camera. At the
same time, the methodological platform it supports,
offers promising advantages for future studies of
motor behaviour (Wolpert, et.al., 2011, Wolpert and
Flanagan, 2010). It namely enables a tight
integration of psychophysical and functional
imaging studies and can thereby guide
investigations of the still unknown neural
foundation of cortical action selection and motor
learning rules.
REFERENCES
Abbott, W. W.; Faisal, A. A. (2012) Ultra-low-cost 3D
gaze estimation: an intuitive high information
throughput compliment to direct brain–machine
interfaces, Journal of Neural Engineering, 9
(4),046016
Abbott, W. W.; Zucconi, A.; Faisal, A. A.; Large-field
study of ultra low-cost, non-invasive task level bmi
(2013) IEEE/EMBS Conf. Proc. on Neural Eng.
(NER),723-726
Brayanov, J. B., Press, D. Z., and Smith, M. A. (2012).
Motor Memory Is Encoded as a Gain-Field
Combination of Intrinsic and Extrinsic Action
Representations. Journal of Neuroscience.
Faisal, A. A. , Selen, L. P. J. and Wolpert, D. M. (2008)
Noise in the nervous system, Nature Reviews
Neuroscience, 9 (4),292-303
Faisal, A. A. , Stout, D., Apel, J. and Bradley, B. (2010)
The manipulative complexity of Lower Paleolithic
stone toolmaking,PloS one, 5(11): e13718,2010
Fara, S.; Vikram, C. S. , Gavriel, C.; Faisal, A. A. Robust,
ultra low-cost mmg system with brain-machine-
interface applications (2013) IEEE/EMBS Conf. Proc.
on Neural Eng. (NER),723-726
Gavriel, C.; Faisal, A. A.; ",Wireless kinematic body
sensor network for low-cost neurotechnology
applications “in-the-wild” (2013) IEEE/EMBS Conf.
Proc. on Neural Eng. (NER), 1279-1282
Thomik, A. A. C.; Haber, D. ,Faisal, A. A. (2013); Real-
time movement prediction for improved control of
neuroprosthetic devices, IEEE/EMBS Conf. Proc. on
Neural Eng. (NER), 625-628
Hecht, E. E.; Gutman, D. A.; Khreisheh, N.; Taylor, S.
V.; Kilner, J.; Faisal, A. A.; Bradley, B .A.;
Chaminade, T.; Stout, D.; (2014) Acquisition of
Paleolithic toolmaking abilities involves structural
remodeling to inferior frontoparietal regions, Brain
Structure and Function 1863-2653, 1-17
Haber, D.; Thomik, A. A. C.; Faisal, A. A. (2014).
Unsupervised time series segmentation for high-
dimensional body sensor network data streams, IEEE
Conf Wearable and Implant. Body Sensor Networks
(BSN),121-126,
Friston, K. (2010). The free-energy principle: a unified
brain theory? Nature Reviews. Neuroscience, 11(2),
127–138.
Friston, K. J., Daunizeau, J., and Kiebel, S. J. (2009).
Reinforcement learning or active inference? PLoS
ONE, 4. doi:10.1371/journal.pone.0006421
Ingram, J., Körding, K. P. , Howard, I. S. and Wolpert, D.
M. (2008) The statistics of natural hand movements,
Experimental Brain Research 188 (2), 223-236
Kato, H. and Billinghurst, M., 1999. Marker Tracking and
HMD Calibration for a Video-based Augmented
Reality Conferencing System. In Augmented Reality,
1999.(IWAR'99) Proceedings. 2nd IEEE and ACM
International Workshop on, pp. 85-94.
Shadmehr, R., and Moussavi, Z. M. (2000). Spatial
generalization from learning dynamics of reaching
movements. The Journal of neuroscience : the official
journal of the Society for Neuroscience (Vol. 20, pp.
7807–7815). doi:20/20/7807 (pii)
Shadmehr, R., and Mussa-Ivaldi, F. A. (1994). Adaptive
representation of dynamics during learning of a motor
task. The Journal of Neuroscience : The Official
Journal of the Society for Neuroscience, 14, 3208–
3224. doi:8182467
Syladi A., Faisal A.A. (2012). What is the hierarchical
representation of tasks involving objects with
complex internal dynamics? Frontiers in
Computational Neuroscience.doi:10.3389/conf.fncom
.2012.55.00129
Todorov, E. (2004). Optimality principles in sensorimotor
control. Nature Neuroscience, 7, 907–915. doi:10.
1038/nn1309
Todorov, E., and Jordan, M. I. (2002). Optimal feedback
control as a theory of motor coordination. Nature
Neuroscience, 5, 1226–1235. doi:10.1038/nn963
Wolpert, D. M., Diedrichsen, J., and Flanagan, J. R.
(2011). Principles of sensorimotor learning. Nature
Reviews. Neuroscience, 12(12), 739–51. doi:10.1038/
nrn3112
Wolpert, D. M. and Flanagan, J. R., 2010. Motor
learning. Curr Biol, pp. 467-472.
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
30
