
Intelligent Student Support in the FLIP Learning System based on
Student Initial Misconceptions and Student Modelling
Sokratis Karkalas and Sergio Gutierrez-Santos
Department of Computer Science and Information Systems, School of Business, Economics and Informatics,
Birkbeck, University of London, Malet Street, London WC1E 7HX, U.K.
Keywords:
Student Modelling, Exploratory Learning, Rule-based System.
Abstract:
The ’FLIP Learning’ (Flexible, Intelligent and Personalised Learning) is an Exploratory Learning Environment
(ELE) for teaching elementary programming to beginners using JavaScript. This paper presents a sub-system
in FLIP that can be used to generate individualised real-time support to students depending on their initial
misconceptions. The sub-system is intended to be used primarily in the early stages of student engagement
in order to help them overcome the constraints of their Zone of Proximal Development (ZPD) with minimal
assistance from teachers. Since this is an ongoing project we also report on issues related to potential changes
or enhancements that will enable a more optimised use under real classroom conditions.
1 INTRODUCTION
This paper describes the design of an Exploratory
Learning Environment (ELE) for teaching introduc-
tory programming to University students. It has long
been established that teaching and learning program-
ming at that level is particularly challenging for tutors
and students. Computer programming is one of the
major challenges in computing education (Benned-
sen and Caspersen, 2007) and as composition-based
task it imposes major problems to novices. Students
at that level may suffer from a wide range of difficul-
ties and deficits (Robins et al., 2003). Programming
courses are considered to be hard to attend and statis-
tically that leads to high dropout rates (Robins et al.,
2003; Bennedsen and Caspersen, 2007).
It is evident that this part of computing education
is particularly sensitive and as such it requires a major
effort in terms of design, preparation and implemen-
tation from academic staff. Programming is a craft
and it can only be learnt by doing. Most of the learn-
ing takes place in computer laboratories, where stu-
dents under the supervision of tutors, attempt to solve
programming exercises. It is obvious that there is an
analogy between the effectiveness of the processes
that take place during the practical exercises in the
lab and the actual learning outcome that can eventu-
ally be achieved. If students can utilise as much as
possible of the resources available and the system is
flexible enough so that individualised support is pro-
vided in a timely fashion then it is more likely for
them to achieve an optimum result.
The focus of this paper is to present a system that
is able to provide a flexible and personalised learning
experience to the students without extra investment in
terms of resources. Students will be able to work on
their own in an exploratory manner and receive imme-
diate attention from intelligent virtual tutors whenever
needed. These tutors can provide individualised help
based on the students’ activity logs and the initial mis-
conceptions they may have.
2 RELATED WORK
The need for intelligent computer-supported help in
teaching is not a recent development. Attempts to-
wards this direction had started in the late ’70s. Typi-
cal examples of these attempts are intelligent tutoring
systems (ITS) like (Brown and Burton, 1978; Reiser
et al., 1985; Johnson and Soloway, 1985) targeting
bugs in procedures. A rather different approach is
the ELM-ART (Brusilovsky et al., 1996) which is
more an intelligent adaptive courseware delivery sys-
tem rather than a buggy ruler. Other more recent at-
tempts include (Mitrovic, 2003; Sykes and Franek,
2003; Holland et al., 2009; Peylo et al., 2000). Ac-
cording to (Brusilovsky and Peylo, 2003) systems
may be intelligent and/or adaptive. An intelligent
system is one that applies techniques from the field
353
Karkalas S. and Gutiérrez Santos S..
Intelligent Student Support in the FLIP Learning System based on Student Initial Misconceptions and Student Modelling.
DOI: 10.5220/0005127603530360
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2014), pages 353-360
ISBN: 978-989-758-049-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

of AI in order to provide better support to the users.
An adaptive system is one that takes into account the
user’s individuality in order to change the way it inter-
acts with the users. The system in (Mitrovic, 2003)
is intelligent but not adaptive. It compares student so-
lutions to correct solutions specified by tutors using
domain knowledge that is represented in the form of
constraints. Constraint-based modelling is also used
in J-LATTE (Holland et al., 2009). This system
teaches Java and provides support in both design and
implementation aspects of the language. Another sys-
tem that teaches Java is (Sykes and Franek, 2003).
This is an expert system supported by decision trees to
provide intelligent support and adaptiveness. A rather
different approach is adopted by (Peylo et al., 2000).
Domain knowledge in this case is represented as an
ontology. The system is web-based and teaches Pro-
log.
All the aforementioned systems, despite their dif-
ferences, converge in one thing. They all presuppose
the selection of a given task and they offer guidance in
a controllable manner. The difference between FLIP
and systems like the above is the fact that FLIP is
an Exploratory Learning Environment (ELE). Typi-
cal ITS of the past are designed to provide assistance
to problem-based learning (PBL) scenarios (Savery,
2006) in a very controllable way. A student is given
a specific well-defined problem to solve and is not
’allowed’ to make mistakes during the process. The
system automatically detects mistakes and corrects
them. The scenario with FLIP is quite different. Stu-
dents are given open-ended problems (inquiry-based
learning scenarios (Savery, 2006)) and try to discover
knowledge in an exploratory manner. FLIP does not
intervene in this process in a strict and intrusive way.
The process is not controllable. Help is always avail-
able but is only given on demand. Another impor-
tant difference is that FLIP is designed to target stu-
dent misconceptions and not bugs in code. A bug is a
section of code that does not conform to the program
specification. In FLIP there is no program specifica-
tion at that level. Furthermore, bugs may not always
be related to student misconceptions. In that respect,
fixing a bug might not be equally beneficial to fixing
a misconception in terms of learning outcome.
3 THE PROBLEM
Teaching programming is a very labour intensive pro-
cess especially if the intended class is a cohort of be-
ginners. Programming is a craft and as such it in-
volves hands-on laboratory work. This is normally
an Inquiry-Based Learning (IBL) or Problem-Based
Learning (PBL) based practical exercise that takes
place in a computer laboratory. Learners develop
their knowledge through this process under the assis-
tance of a facilitator (tutor). Students normally ask
for assistance every time they feel they cannot cope
with some problem relating to the syntax or the logic
of their program. Debugging is a tedious process
and can be a very daunting experience especially for
young programmers. If the student cannot receive the
amount of help needed in a timely fashion to over-
come the problem this can have a significant effect on
their confidence and consequently a negative impact
on their studies.
Ideally the learning experience in the computer
laboratory must be a sequence of successive itera-
tions that follow Kolbs learning cycle (Kolb et al.,
1984; Konak et al., 2014). The students’ engagement
with the task should be a cyclical process. In every
round the students make an attempt to develop some-
thing that moves them closer to the completion of the
given task. This attempt is interrupted when they hit
the boundaries of the inner circle within their partic-
ular ZPD (Vygotski
˘
ı et al., 1978). This is where
the facilitator comes into play. The student asks for
help and the available tutor inspects the problem and
tries to motivate the student to move on by provid-
ing help in small increments. The intention in this
case is to provide only enough and relevant help so
that the student can overcome the issue and carry on
with the rest of the development without problems.
During this little interval the student and the facilita-
tor are engaged within a conversation where the fa-
cilitator helps her to understand the issues raised and
to develop an abstract conceptualisation that is then
transformed to active experimentation in the next cy-
cle (Kolbs Learning Cycle) (Kolb et al., 1984; Konak
et al., 2014). After each successful cycle a little bit
of learning is achieved and gradually (possibly after
many iterations) the ZPD (Vygotski
˘
ı et al., 1978) cir-
cles expand. This, of course, is based on the assump-
tion that there is real substance in these cycles and
actual learning is achieved. If students cannot receive
the help they need in a timely fashion then it is less
likely to achieve their full potential in the given time
for laboratory work. In other words it is less likely
to perform as many cycles as they would if help was
immediately available. Another issue is related to the
relevancy and the amount of help. Experienced tutors
that are aware of the typical student misconceptions
can easily switch from problem to problem and focus
quickly on the type of help that needs to be provided
both in terms of size and relevancy. Tutors, though,
are human beings and their performance might be in-
fluenced by a wide variety of factors: personal, social
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
354

etc. Therefore, relevancy and proper size of help can-
not be guaranteed either.
Human tutors cannot be substituted by machines.
This is not the intention of this work. The intention
is to delegate as much as possible of these tasks to
intelligent agents. If the system knows what student
misconceptions to anticipate and how to provide rele-
vant help then the students will be able to receive im-
mediate help whenever needed. This help will always
be focused and consistent with the actual need. That
will also keep the interaction between the students and
the teachers to a minimum and promote independent
and constructive learning. The students will learn to
work autonomously and utilise as much of their back-
ground knowledge as possible. This is in full com-
pliance to the constructivist approach (Huitt, 2003;
Bruner, 1966; Vygotski
˘
ı et al., 1978), which is to-
day’s predominant educational paradigm: new knowl-
edge is constructed on the basis of existing knowl-
edge. The students will be able to engage in a highly
constructive and rewarding learning experience where
they will appreciate their own contribution and they
will build up their confidence. The process will also
be more inclusive since the amount and depth of help
received will always be the same regardless of socio-
cultural factors. On the other hand tutors will be given
space to offer more high level support and deal with
aspects of support that machines are unable to cope
with. The net result is expected to be a better and
more effective learning experience which in turn will
result in higher student retention in a subject that tra-
ditionally suffers from high dropout rates (Robins
et al., 2003).
4 MODELLING CONCEPTS AND
LEARNERS
The two most important entities in FLIP are concepts
and students (learners). The main components of the
learner model can be summarised as follows:
1. Misconceptions identified (journal of temporal
data): This information can be a useful indica-
tor of the student’s progress. If the system keeps
recording the same misconceptions, then proba-
bly no progress is being made. The frequency of
occurrence per session can be particularly useful
in that respect. This data can also be useful for the
automatic production of recommendations to the
student in terms of material, exercises etc.
2. Misconceptions covered (journal of temporal
data): This information can be used to make
teaching adaptive to the student’s needs. If the
help given the first time was not enough, then the
system can provide a deeper analysis of the prob-
lem possibly using the aid of visual or other tools.
If it is established that the system cannot provide
more help, then the human tutor can be asked to
intervene.
3. Frequency of help use: This information, in con-
junction with the previous sets, can be used to
show the usefulness of the intelligent support sub-
system. It can also be used to profile students’
behaviour. These profiles can then be used to pro-
vide more insight to the intelligent support tools.
4. Student activity/inactivity: Activity in this case
means actions performed in the editor. If the stu-
dent uses the editor to write and experiment with
code then the system considers the session active.
Long inactivity periods during the laboratory ses-
sions might be an indication of problems. These
problems cannot be detected by the intelligent
support subsystem because the detection mecha-
nism is dependent on code. If inactivity is identi-
fied, then the system provokes the intervention of
the tutor.
5. Use of language reference: In practical terms this
can enhance the student’s experience by providing
direct access (links) to parts of the language refer-
ence that are more relevant to the student’s needs.
These parts can also be prefetched and cached for
efficiency (responsiveness).
As said above concepts represent known stu-
dent initial misconceptions. In practical terms these
misconceptions correspond to certain formations of
source code. These formations (patterns) could ef-
fectively be represented as sets of characteristics in
the form of logical expressions. The first step in
the process of modelling is to identify the patterns
that indicate such misconceptions. As stated before
in this text, FLIP’s intended target group is students
with no prior experience in programming. It is as-
sumed that these students will be using the system
in an introductory programming course that does not
fully cover all the complexities of the JavaScript lan-
guage and the more advanced object-oriented features
of it. Therefore, in this very first stage of FLIP the in-
tention was to capture only the misconceptions that
correspond to basic language use and elementary al-
gorithmic thinking. In this project the concept elici-
tation process involved 111 students from 3 introduc-
tory programming courses. Two of them were post-
graduate courses taught in Java comprising 42 and
44 students respectively and the remaining one was
a undergraduate course taught in JavaScript. The in-
tention was to identify misconceptions that are com-
IntelligentStudentSupportintheFLIPLearningSystembasedonStudentInitialMisconceptionsandStudentModelling
355
mon in both languages. The research was conducted
at the Department of Computer Science and Informa-
tion Systems, Birkbeck, University of London during
the academic years 2012-13 and 2013-14. Collecting
data from the JavaScript course proved to be particu-
larly useful since we were able to identify language-
specific misconceptions too. The general research ap-
proach followed was more of an exploratory nature
rather than confirmatory. We thought that it would be
best not to constrain the domain by interviewing vol-
unteers using existing classifications of already recog-
nised misconceptions in the literature. Therefore, the
data collection technique used was the systematic reg-
istration of every issue that took place in the practical
laboratory sessions during these three terms (follow-
ing a process similar to Grounded Theory (Strauss
and Corbin, 1994)). The Java courses were fast-
paced, intense courses and covered much more ma-
terial and in greater depth. Therefore, the data collec-
tion part for these courses took place only for the first
four sessions of each term. The data collection was
carried out by two teaching assistants and the lecturer.
The teaching assistants collected the data which was
then reviewed by the lecturer. The author was a teach-
ing assistant in the Java courses and the lecturer of the
JavaScript course. The co-author was the lecturer of
the Java courses. After the data was collected we clas-
sified it using the Concept Inventory (CI) presented in
(Goldman et al., 2008). According to the results, the
following categories were applicable in our sample:
We did not expect our sample to exhaustively
cover all the concepts identified by the Delphi experts
in (Goldman et al., 2008). The concepts covered were
16 out of 32 in the CI (50%). The 3 concepts in the
grey area were not part of the original CI proposed in
(Goldman et al., 2008). The actual misconceptions
that emerge in each course may depend on many fac-
tors like the students’ background, the language and
programming paradigm used, the material covered,
the intended learning outcomes, the tutors’ contribu-
tion and so on. Assuming that these things remain
fixed for our courses, the aim of this work was to iden-
tify what is the actual need of our students in terms
of help. The fact that the concepts identified cover a
large part of the Delphi CI and overlap at a propor-
tion of 60% with the student misconceptions identi-
fied in (Kaczmarczyk et al., 2010) is an indication
that the elicitation process was effective. The asterisk
under the ’D’ column in the above table indicates that
the same concept was also found in (Kaczmarczyk
et al., 2010). There were no object-oriented miscon-
ceptions identified (apart from one) since JavaScript
is a prototype object-based (class-less) language and
the related misconceptions would not be relevant.
Table 1: Concept Categories Identified in the Sample.
Procedural Programming Concepts
ID Topic D
1 PA1 Parameters/Arguments I
2 PA2 Parameters/Arguments II
3 PA3 Parameters/Arguments III
4 PROC Procedures/Functions/Methods
5 TYP Types *
6 BOOL Boolean Logic
7 COND Conditionals *
8 SVS Syntax vs Semantics
9 AS Assignment Statements *
10 SCO Scope
Object Oriented Concepts
1 PVR Primitive and Ref Variables *
Algorithmic Design Concepts
1 IT2 Iteration/Loops II *
2 IT3 Iteration/Loops III
3 IT4 Iteration/Loops IV
4 IT5 Iteration/Loops V
5 REC Recursion
6 AR1 Arrays I *
7 AR2 Arrays II
8 AR3 Arrays III
Furthermore, most of the difficult aspects of object-
oriented development, like inheritance, are not part of
the JavaScript introductory course. Also, it was prob-
ably very difficult for the program design concepts to
reveal themselves in the code, at least in this initial
stage. There have been recorded incidents in the lab
regarding design-related concepts but there was no us-
able code involved. Therefore, this category was ex-
cluded from the set. The CI that was formed after our
analysis is presented in the Appendix.
5 SUPPORTING STUDENTS
FLIP utilises a rule-based expert system that interacts
with the student when there is a misconception to be
resolved. It takes the role of the teacher and repeti-
tively exchanges information with the student in order
to assess the current situation, identify the problems
and provide individualised support whenever possi-
ble.
This system accepts two inputs: rules (miscon-
ceptions) and facts (current student understanding).
Rules are inserted by experts and form the knowledge
base of the system. The conditional part of these rules
corresponds to one or more characteristics identified
in the code (facts). The consequent part corresponds
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
356
to the action that needs to take place in case they fire.
Facts are inserted dynamically into the system during
the development process. The student’s code is stati-
cally analysed and divided into distinguishable char-
acteristics that can be extracted in the form of a vec-
tor. These characteristics take the form of atomic for-
mulae (variable/predicate pairs) and are inserted auto-
matically into the system as facts. One or more char-
acteristics combined with Boolean operators can form
an equivalent representation of a potential misconcep-
tion. Facts can also be generated by the system itself.
5.1 A Typical Usage Scenario
The student is trying to do an exercise in the lab. Part
of this exercise is to compute the sum of numeric val-
ues in an array. She has tried many times using dif-
ferent approaches but the result is still not satisfactory
and she decides to ask for help. She selects the (fol-
lowing) problematic part of the code and presses the
button ’help’.
1 var x = [2,5,1,8,9];
2
3 for (var i = 0; i <= 5; i++)
4 {
5 var sum = 0;
6 sum += x[i];
7 }
8
9 alert(sum);
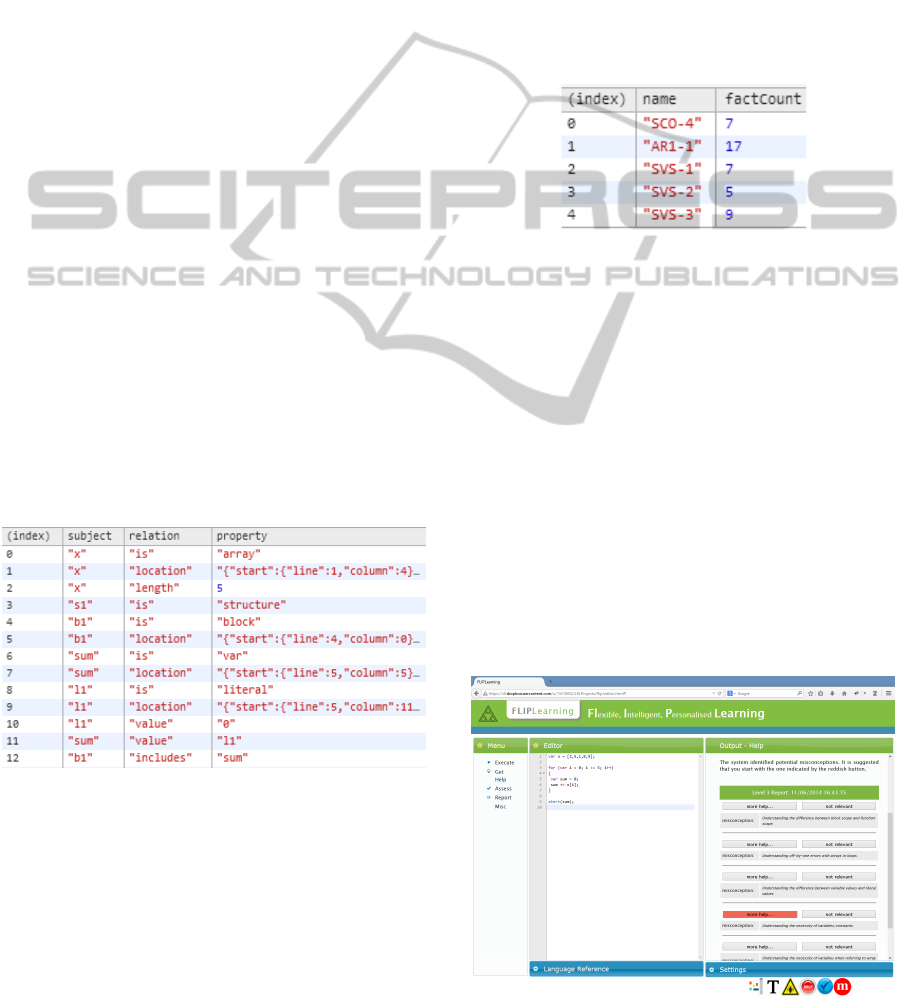
The system parses/analyses the code and gener-
ates a series of facts. An extract of this vector is given
in the following figure:
Figure 1: Facts (Code Status).
Entities that are not explicitly named in the code
such as programming structures (if, for) and blocks
of code are given identifiers by the analyser (s1, s2, ..,
sn) and (b1, b2, .., bn) respectively.
The rules that correspond to the following miscon-
ceptions get activated (their conditional part is satis-
fied by the facts):
1. (SCO-4) Understanding the difference between
block scope and function scope. (7 Facts)
2. (AR1-1) Understanding off-by-one errors when
using arrays in loop structures. (17 Facts)
3. (SVS-1) Understanding the difference between
variable values and literal values. (7 Facts)
4. (SVS-2) Understanding the necessity of vari-
ables/constants. (5 Facts)
5. (SVS-3) Understanding the necessity of variables
when referring to array length. (9 Facts)
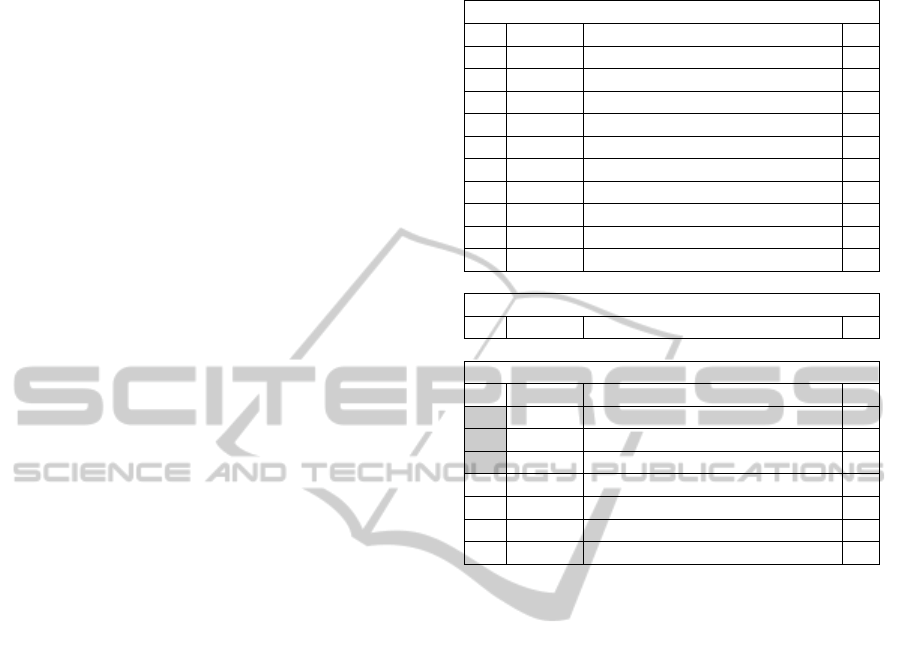
The following figure shows the contents of the
’agenda’ which is the component that stores the ac-
tive rules in the reasoner:
Figure 2: Active Rules.
The number of facts (factCount) corresponds to
the facts that activated the rule. In practical terms
these are the expressions presented in figure 1 that
have been evaluated in the conditional part of the rule.
The reasoner does not make a decision on which
rule to fire. It informs the user that potential miscon-
ceptions have been identified in the code and expects
her to make a decision. In general the reasoner stays
as discreet as possible throughout this process. The
only indication that it has a preference as to which
rule needs to be fired first is the colour of the cor-
responding button (red). This decision is based on
the number of facts each rule refers to. The rule with
the smallest number of facts is probably simpler to
resolve and simple problems should have a priority
over more difficult ones. The following figure shows
Figure 3: FLIP.
IntelligentStudentSupportintheFLIPLearningSystembasedonStudentInitialMisconceptionsandStudentModelling
357
what is presented to the user after the ’help’ button is
pressed:
The user is free to discard misconceptions as not
relevant to the problem under consideration or to se-
lect one and start a tutorial. The latter is equiva-
lent to firing the corresponding rule. If that happens
the reasoner consults the current learner model to see
whether this needs to be taught for the first time. If
this is the case, the system displays a brief explana-
tion of the issue and prompts the user to read the re-
lated part of the language documentation. This is dis-
played in the language reference section. The user is
expected to read the suggested text, possibly watch a
video if there is one available, review the code and try
to solve the problem alone. If that happens the user
can press the help button again to verify the correct-
ness of the change. If the change is successful then the
system will identify only three problems and consider
the conception learnt. If the problem is still there or
the same concept has been taught in the past, then the
system displays a hint as to what might be the solution
to the problem. If, after the next attempt, the problem
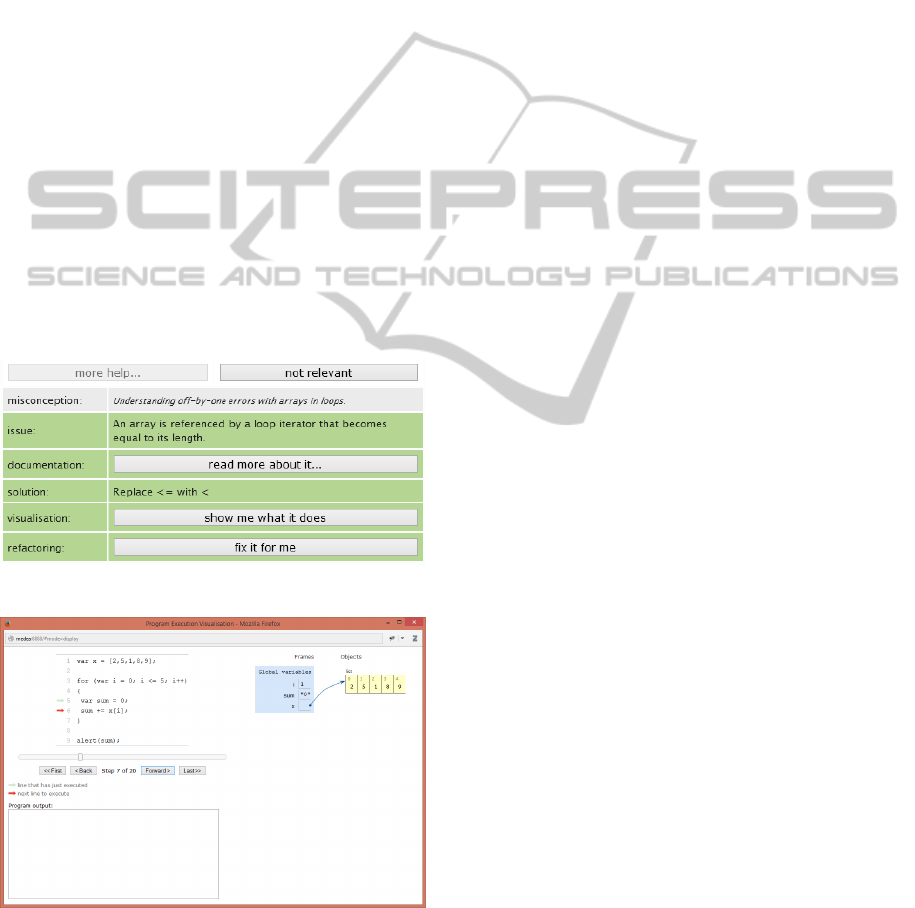
is still there, the system tries to help with a visuali-
sation that shows a memory map and a code tracing
utility.
Figure 4: Levels of Support.
Figure 5: Code Tracing Visualisation.
If the problem persists even after the visualisation,
the system offers automatic code refactoring. This
is a feature that is not heavily used since there is a
penalty that needs to be paid in terms of rule com-
plexity. Therefore it might not be available in every
rule. The information about the location of the prob-
lem and how it can be fixed is encoded in the rules and
that makes the rules lengthy and complicated. This is
an issue that will prossibly be addressed in future ver-
sions of the system. If the rule appears again after this
process, then the system concludes that human inter-
vention is required and records the relevant indicator.
6 CONCLUSIONS
This paper has described how data has been collected,
analysed, and systematically classified to get a tax-
onomy of common misconceptions of novice pro-
grammers in JavaScript, building on previous work
on other programming languages; it has also shown
how this information is used to provide personalised
feedback in the context of an open-ended exploratory
programming session.
Preliminary testing has shown that the system has
achieved its original design goals and it operates as
described in the paper. An evaluation that will mea-
sure the amount of work that the system can offload
from human tutors in the classroom is scheduled for
the next edition of the JavaScript course in the Au-
tumn term and thus falls out of the scope of this paper.
We envision the system to become more sensi-
tive and receptive to user actions and it would also
be desirable to obtain the users’ previous knowledge,
needs, interests, motives, constraints possibly from
other sources like social networking platforms. Hav-
ing a richer and more representative user profile will
facilitate a better and more personalised learning ex-
perience.
REFERENCES
Bennedsen, J. and Caspersen, M. E. (2007). Failure rates
in introductory programming. ACM SIGCSE Bulletin,
39(2):32–36.
Brown, J. S. and Burton, R. R. (1978). Diagnostic mod-
els for procedural bugs in basic mathematical skills*.
Cognitive science, 2(2):155–192.
Bruner, J. S. (1966). Toward a theory of instruction, vol-
ume 59. Harvard University Press.
Brusilovsky, P. and Peylo, C. (2003). Adaptive and in-
telligent web-based educational systems. Interna-
tional Journal of Artificial Intelligence in Education,
13(2):159–172.
Brusilovsky, P., Schwarz, E., and Weber, G. (1996). Elm-
art: An intelligent tutoring system on world wide
web. In Intelligent tutoring systems, pages 261–269.
Springer.
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
358

Goldman, K., Gross, P., Heeren, C., Herman, G., Kaczmar-
czyk, L., Loui, M. C., and Zilles, C. (2008). Iden-
tifying important and difficult concepts in introduc-
tory computing courses using a delphi process. ACM
SIGCSE Bulletin, 40(1):256–260.
Holland, J., Mitrovic, A., and Martin, B. (2009). J-latte: a
constraint-based tutor for java.
Huitt, W. (2003). Constructivism. Educational psychology
interactive.
Johnson, W. L. and Soloway, E. (1985). Proust:
Knowledge-based program understanding. Software
Engineering, IEEE Transactions on, (3):267–275.
Kaczmarczyk, L. C., Petrick, E. R., East, J. P., and Herman,
G. L. (2010). Identifying student misconceptions of
programming. In Proceedings of the 41st ACM techni-
cal symposium on Computer science education, pages
107–111. ACM.
Kolb, D. A. et al. (1984). Experiential learning: Experience
as the source of learning and development, volume 1.
Prentice-Hall Englewood Cliffs, NJ.
Konak, A., Clark, T. K., and Nasereddin, M. (2014). Using
kolb’s experiential learning cycle to improve student
learning in virtual computer laboratories. Computers
& Education, 72:11–22.
Mitrovic, A. (2003). An intelligent sql tutor on the web.
International Journal of Artificial Intelligence in Edu-
cation, 13(2):173–197.
Peylo, C., Teiken, W., Rollinger, C.-R., and Gust, H. (2000).
An ontology as domain model in a web-based edu-
cational system for prolog. In FLAIRS Conference,
pages 55–59.
Reiser, B. J., Anderson, J. R., and Farrell, R. G. (1985).
Dynamic student modelling in an intelligent tutor for
lisp programming. In IJCAI, pages 8–14.
Robins, A., Rountree, J., and Rountree, N. (2003). Learning
and teaching programming: A review and discussion.
Computer Science Education, 13(2):137–172.
Savery, J. R. (2006). Overview of problem-based learning:
Definitions and distinctions. Interdisciplinary Journal
of Problem-based Learning, 1(1):3.
Strauss, A. and Corbin, J. (1994). Grounded theory method-
ology. Handbook of qualitative research, pages 273–
285.
Sykes, E. R. and Franek, F. (2003). A prototype for an intel-
ligent tutoring system for students learning to program
in java (tm). In Proceedings of the IASTED Interna-
tional Conference on Computers and Advanced Tech-
nology in Education, June 30-July 2, 2003, Rhodes,
Greece, pages 78–83.
Vygotski
˘
ı, L. S., Cole, M., and John-Steiner, V. (1978).
Mind in society.
APPENDIX
The following list presents the misconceptions iden-
tified in our work. Every misconception is given an
identifier comprising the ID of the concept that cor-
responds to the Delphi CI plus a numeric value that
distinguishes it from similar misconceptions associ-
ated with the same concept.
1. PA1-1: Understanding the difference between
’call by reference’ and ’call by value’ semantics.
2. PA1-2: Understanding the implications of mask-
ing an object reference within a function.
3. PA2-1: Understanding the difference between
’formal parameters’ and ’actual parameters’.
4. PA3-1: Understanding the scope of parameters,
correctly using parameters in procedure design.
5. PROC-1: Understanding the difference between
definition and execution of function.
6. PROC-2: Understanding the role of the return
value.
7. PROC-3: Understanding the usability of a func-
tion.
8. TYP-1: Understanding the difference between
numeric values and their textual representation.
9. TYP-2: Understanding the difference between
Boolean values and their textual representation.
10. TYP-3: Understanding the difference between
null value and its numeric representation.
11. TYP-4: Understanding the difference between ar-
rays of values and their possible numeric repre-
sentation.
12. TYP-5: Understanding the implications of leav-
ing variables uninitialised (undefined).
13. BOOL-1: Understanding the fact that a Boolean
expression must yield a Boolean value.
14. COND-1: Understanding how to remove unnec-
essary conditions from multiple selection struc-
tures.
15. COND-2: Understanding the correct use of the
else clause.
16. COND-3: Understanding the potential danger of
testing different variables in multiple selection
structures.
17. COND-4: Understanding the potential danger of
not using break in switch structures.
18. COND-5: Understanding that repetition of code
inside multiple selection blocks imply non-
dependency.
19. SVS-1: Understanding the difference between
variable values and literal values.
20. SVS-2: Understanding the necessity of vari-
ables/constants.
21. SVS-3: Understanding the difference between
variable declaration and variable reference.
IntelligentStudentSupportintheFLIPLearningSystembasedonStudentInitialMisconceptionsandStudentModelling
359

22. AS-1: Understanding the difference between as-
signment and equality operation.
23. SCO-1: Understanding the implications of not
declaring a variable.
24. SCO-2: Understanding the difference between a
global and a local variable.
25. SCO-3: Understanding that a (homonymous) lo-
cal variable masks a global one.
26. SCO-4: Understanding the difference between
block scope and function scope.
27. PVR-1: Understanding the difference between
variables which hold data and variables which
hold memory references.
28. IT2-1: Understanding that loop variables can be
used in expressions that occur in the body of a
loop.
29. IT3-1: Understanding the implications of having
an empty body in a loop structure.
30. IT4-1: Understanding the semantics behind dif-
ferent loop structures.
31. IT5-1: Understanding that loop variables can help
in loop termination.
32. REC-1: Understanding the implications of not us-
ing a base case in a recursive function.
33. REC-2: Understanding the implications of not us-
ing the return values from recursive calls within a
function.
34. AR1-1: Understanding off-by-one errors when
using arrays in loop structures.
35. AR2-1: Understanding the difference between a
reference to an array and an element of an array.
36. AR3-1: Understanding the declaration of an array
and correctly manipulating arrays.
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
360
