
An Autonomic System for Intelligent Truck Parking
Jose F. Garc
´
ıa
1
, Vicente R. Tom
´
as
2
, Luis A. Garc
´
ıa
2
and Juan J. Mart
´
ınez
1
1
Institute of robotics and information and communication technologies (IRTIC), University of Valencia, Paterna, Spain
2
Engineering and Computer Science Department, University Jaume I, Castell
´
on de la Plana, Spain
Keywords:
Autonomic Systems, Multi-agent Systems, Intelligent Truck Parking, Negotiation Systems.
Abstract:
Traffic and road transport conditions are strongly influenced by the decisions of drivers. The more informa-
tion they receive, the better decisions may be taken about their behavior. This is especially important in the
transport of goods, since drivers are subject to traffic laws about maximum driving time and minimum time
rest. In this paper a multi-agent system for negotiated management of parking spaces in road rest areas is
presented. This system dynamically adapts itself to the preferences and needs of the drivers of goods about
parking requests. The system is shown to be robust to incidents regarding the closure of road rest areas and
an increased volume of freight traffic. The results also show that the number of illegal parkings is reduced
resulting in greater road safety.
1 INTRODUCTION
The domain of road traffic and transport involves an
inherently distributed environment. Several traffic or-
ganizations must act in a coordinated way to improve
the traffic safety and status, for example by identify-
ing traffic flow problems and by proposing actions to
alleviate them. This coordination is fundamental in
Long Distance Corridors (LCD). A LDC is a road net-
work corridor that includes a common platform with a
co-ordinated setup of different systems and services,
contributing to improve traffic management and in-
formation for travelers and freight transport on long
distances (Aumund, 2004). The main use of these
corridors are the transport of goods. Therefore, route
planning plays an important role in the goods road
transport domain. However, route planing does not
only include the itinerary but also the rest road ar-
eas to park and rest because journey time exceeds the
maximum driving time required by law. Moreover, if
drivers park in not allowed places, they can produce
problems in traffic safety and be fined. The impor-
tance of the parking spaces in Europe is reflected in
several institutional or research actions: ITS direc-
tive (Commission, 2010) , the EU ITS Action Plan
(Commission, 2008) and the deployment guideline
for Intelligent truck parking developed in the Easy-
Way project (EasyWay, 2012).
An Intelligent Truck Parking system (ITPs) is de-
fined as an ITS service that support drivers in two
ways: a) information and guidance (on truck parking
areas) and b) reservation (of truck parking spaces).
ITPs could be classified attending the level of Ser-
vice (LoS). LoS defines the specific characteristics
that the ITP offers to the drivers. In (EasyWay, 2012),
5 different levels are defined, from A (lower level) to
E (high level). Currently, several organizations and
projects have developed ITPs projects regarding level
A to C. These systems are based on static informa-
tion, based on books and journey routes periodically
edited (ParkMyRig, 2014) (Project SETPOS, 2014).
Regarding level of service D, systems with dynamic
information, there are also different systems (Sndor
and Csiszrr, 2013) (Vennekens, 2014). These book-
ing systems are based on pre-trip systems, i.e. the
driver has to book the place to rest before to begin the
journey.
In (ParkYA, 2014), a new application for mobile
devices has been developed to make easier to find car
parking spaces in real-time. Despite it is a good ap-
proach, its main problem is that only drivers use it, the
parking areas are not involved in the system. Thus,
the parking availability is defined by drivers, that in-
form, in a qualitative and subjective way, the occu-
pancy of areas.
So, current systems present several difficulties be-
cause drivers do not know the traffic behavior in ad-
vance, so they might even not reach the parking area
booked, or when they reach it the area could not have
free places. Therefore, an ITP system where drivers
810
Garcia J., Tomás López V., García Fernández L. and Martínez Durá J..
An Autonomic System for Intelligent Truck Parking.
DOI: 10.5220/0005149008100816
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (IVC&ITS-2014), pages 810-816
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
snowzone
carry
chains
snowzone
carry
chains
Truckagent
TISagent
Areaagent
TISagent
snowzone
carry
chains
snowzone
carry
chains
TruckagentTruckagent
Truckagent
Reservationandnegotiationprotocols
Informationprotocols
RealWorld
MASSystem
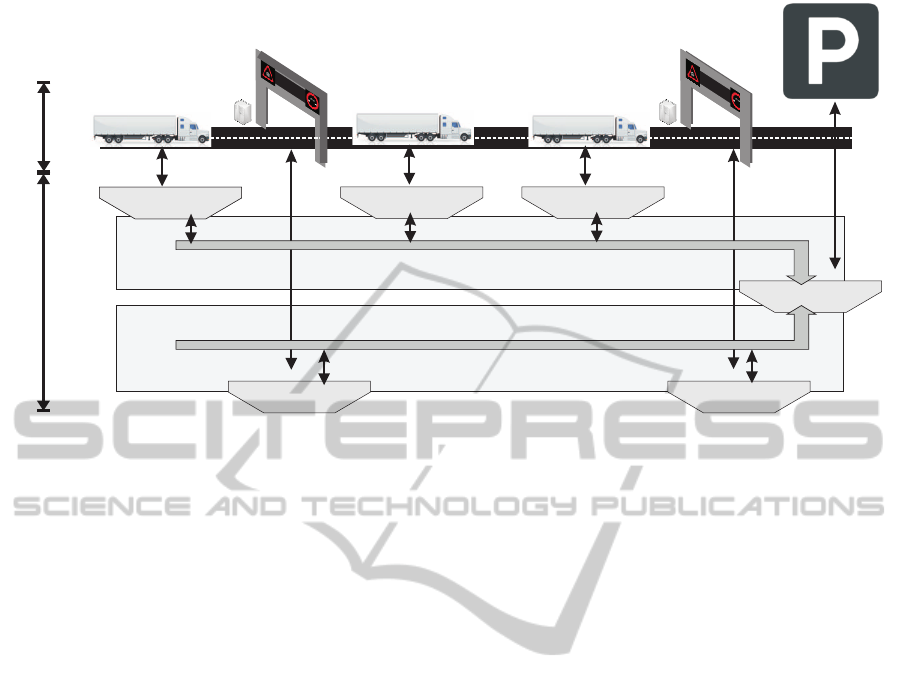
Figure 1: An example of the system architecture. At the top, a real world example is presented, including trucks, variable
message signs and a rest area. On the bottom, the agents that compose the system are showed. Each truck has its own agent,
there is also an agent for VMS and one agent for each area.
could modify their reservation on-trip, depending on
the areas availability, are required. By this way, there
is a demand for ITS services where the real-time com-
munications between vehicles and infrastructure. In
the last years, the advances of the communication
technology have made possible the deployment of co-
operative systems. A cooperative systems is a sys-
tem where the different elements involved in the traf-
fic domain can communicate with each other. These
cooperative systems are usually addressed regarding
the type of elements involved in the communications:
V2V vehicle to vehicle, V2I vehicle to infrastruc-
ture, I2I infrastructure to infrastructure, etc. (Alexan-
der Paier, 2013). But, not only cooperation is impor-
tant, also the way this cooperation enables to run traf-
fic objective functions, even in scenarios in which not
central control is possible as it happens in the traffic
domain. In (COST TU1102, 2015) new ways of de-
signing Road Transportation Support (RTS) systems
based on the ideas of autonomic systems are being
analyzed. The concept of autonomic computing was
defined at the end of the XX century (Kephart and
Chess, 2003) and it defines an autonomic system as
a system able to self-manage without the need of an
external or central manager that identifies the action
to be deployed in each situation or scenario.
In this paper, a new ITP system with self manage-
ment properties is presented. It is defined as a mul-
tiagent architecture following a V2I approach. The
system imposes the coordination between the traffic
elements involved in the solution for an efficient oc-
cupation of the rest areas. It uses a new negotiation
protocol suitable to adapt the dynamically required
places by the trucks to the available places. Besides,
the data exchanged for this negotiation uses the stan-
dard traffic data, DATEX.
The paper is structured as follows. Next section
presents the proposed system for ITP. It describes
the architecture, including the knowledge and infor-
mation models and the communications and negotia-
tion protocols. Then, in Section 3, the real network
is modeled and the different experiments to test and
evaluate the system are described. Finally, the con-
clusions are exposed.
2 A DISTRIBUTED SYSTEM FOR
ITP
The objective of the system is to support truck drivers
to find a place in the most preferable parking area ac-
cording to their preferences. This system will also im-
prove the parking management, because it can man-
age, in real time, the real occupancy of its parking
places, avoiding bad parking nearby the area.
The system is based on the multiagent (MAS)
paradigm. The definition of this proposed MAS con-
tains: the architecture, the description of agents, the
information and knowledge model, both public and
private for each agent and the negotiation protocol to
manage the reservation of free parking spaces.
AnAutonomicSystemforIntelligentTruckParking
811

2.1 System Architecture
The MAS is composed by several kinds of agents:
area agent, truck agent, TIS agent, DF agent and inter-
face agent. Figure 1 shows the software architecture
of this MAS prototype.
2.1.1 Area Agent
Area agents are in charge of managing parking areas.
Areas are located along the road network and have a
limited number of parking spaces. The agent is re-
sponsible of several tasks:
• to attend the reservation process when places are
available.
• to execute the negotiation protocol when there are
more reservations than available places.
• to exchange information about space availability.
2.1.2 Truck Agent
Vehicles circulate along the road network. Truck
agents are responsible of individual truck vehicles.
Using the current truck location, the mean speed, and
the driving times, it forecasts the possible next areas
where the driver could park to rest. These areas are
selected following the preferred order of the driver.
2.1.3 TIS Agent
The Traffic Information Service agent receives infor-
mation from the different parking areas. It manages
a set of Variable Message Signs and it diffuses in-
formation about the places availability in the parking
spaces. This agent is an extension of the VMS agent
described in (Tomas et al., 2012)
2.1.4 DF Agent
The DF agent provides a yellow pages service. Each
agent can register, deregister and search for other
agents or services available in the MAS platform or in
other platforms. The directory facilitator used is the
DF JADE agent (TILAB, 2014) specified by FIPA.
2.1.5 Interface Agent
The goal of this agent is to show how the system sta-
tus evolves dynamically. This agent is based on a
web application and it displays the road network and
the reservation status via Google Maps. The map has
the normal controls of a Google Maps plus a specific
menu to show all the areas and trucks in the road, in-
cluding their public information.
2.2 Information and Knowledge
The information and knowledge model is structured
in two levels: a) the road network model describing
the elements composing the road, including the park-
ing areas and the truck based on DATEX II standard
(DATEXII, 2014) and b) the reservation and negotia-
tion process information.
2.2.1 Road Network Model
This domain is based on (Martinez et al., 2013). It
has been extended and is composed by the following
elements:
• Segments. They represent two way road sections
and their characteristics (road name, number of
lanes, length, free-flow speed, capacity, traffic re-
strictions, ...).
• Links: They represent the road network elements
where two, or more, adjacent segments are con-
nected. The link objects are subdivided in: bifur-
cations, unions, weavings and merges.
• Areas. They represent the rest areas where vehi-
cles can park. The main characteristics are: seg-
ment, kilometer point (kp), facilities, truck capac-
ity, current occupancy and list of reservations.
• Trucks. It models the trucks circulating by the
road network. The main characteristics are: cur-
rent location (segment and kp), origin, destina-
tion, maximum speed and current driving time.
2.2.2 Reservation and Negotiation Model
• Reservation. It represents an area choice from a
specific truck. It includes the truck, the area, the
expected arrival time according traffic conditions
and the expected permanence time.
• Place occupied. It represents a parking place oc-
cupied by a truck. It includes the truck, the area,
the time the truck parked and the permanence
time.
• Preference. It represents the truck’s driver prefer-
ence to a specific area.
• List of preferences. It is a ordered list identifying
the preferences of a specific driver.
• Assignation. An assignation is a pair of elements
< truck
a
, area
i
> indicating that the truck a has
been assigned to an area i.
• Feasible Solution. A feasible solution is a tuple
of Assignations. It includes a possible assignation
for the set of trucks and areas.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
812

• Vote. It represents the score for a specific Feasible
Solution.
• Final Solution. It represents the negotiation solu-
tion. It is the feasible solution that obtained the
higher score.
2.3 Communication Protocols
The communication protocols define the way agents
are related to each other in the platform to exchange
information or to register other agent services. The
communication protocol proposed follows the inter-
action protocols defined by FIPA (Foundation for In-
telligent Physical Agents, 2000). Next, the main sys-
tem protocols are described. The basic protocols like
the registration to DF and similar are not defined.
• Reserve. Request protocol. The truck agent sends
to an area a message to obtain a reservation. If
the protocols ends successfully the area answers
with a reservation. If not, a negotiation protocol
between the area and the trucks begins.
• Ask list preferences. Query protocol. The area
agent ask to the different trucks involved in the
negotiation their preferences.
• Send preferences. Inform protocol. List of pref-
erences sent by trucks to the area agent managing
the negotiation.
• Confirm reservation. Inform protocol. Confirma-
tion sent to trucks involved in the winning solu-
tion.
• Disconfirm reservation. Inform protocol. The
area agent informs to the truck about the cancella-
tion of the requested reservation.
• Park Status register. Request protocol. The TIS
agent sends a message to be registered in the area.
The message contains the occupancy rate. When
the area reaches this percentage, it informs the TIS
agent registered.
• Park Status inform. Inform protocol. The area
sends a message to the registered TIS agents when
the occupancy rates have been reached.
2.4 Negotiation Protocol
The negotiation protocol is launched when an area has
more reservations than available parking places. The
area agent communicates with all involved trucks to
begin the negotiation. The negotiation will be per-
formed using a variation of Borda voting based proto-
col (Capdevila et al., 2013).
The negotiation begins and the area asks to all
trucks their list of preferences. Each truck involved
in the negotiation will assign a value to each of its
preferences. In this approach, the truck preferences
are generated taking into account only the time that
the truck is on the network without stopping, and the
distance to the areas. The preferences ordering is au-
tomatically calculated by means of an heuristic that is
very close to a normal truck driver behavior: drivers
try to maximize driving time without stop stabilized
by law, i.e., the most remote area reachable for the
truck will be the most preferred and the closest area
will be the least preferred area.
Once the area has received all trucks preferences,
it generates the set of feasible solutions which is com-
posed by the set of possible assignations of trucks in
the areas involved in the solution. These feasible so-
lutions are sent to the trucks. Each truck calculates
its votes and then, they are sent to the area. The area
calculates the result and confirms the reservation to
the trucks that have the reservation and disconfirms
the reservation to the truck that is not in the winning
solution. This truck will ask for a reservation in its
following preferred area.
2.5 System Implementation
The system has been implemented in JAVA using a
JADE (TILAB, 2014) platform. JADE is a software
framework to develop agent applications in compli-
ance with FIPA specifications for interoperable intel-
ligent multiagent systems. Figure 2 shows a snapshot
of the interface agent.
Figure 2: Interface agent snapshot. A section of the sys-
tem is presented. Two parking areas, one without parking
places are showed. The information provided via VMS is
also presented.
AnAutonomicSystemforIntelligentTruckParking
813

3 THE MEDITERRANEAN
CORRIDOR: E-15 MOTORWAY
To analyze and evaluate the proposed MAS, a real
road network has been modeled. This road network
is part of the Spanish Transeuropean Road Network
(TERN) and belongs to one of the main european cor-
ridors, the E-15 Long distance corridor. It is used to
transport goods not only from Spain but also from the
North of Africa to Europe.
The modeled part covers the 400 km. of the Va-
lencian Community. The elements modeled includes:
• 1 main road, E-15 (AP-7, A-7 & A-70 national
motorways)
• 27 Segments.
• 25 Links.
• 24 VMS.
• 11 storage areas.
Three different scenarios have been developed to
analyze the system: a) the system behavior in a real
situation, b) the system robustness and c) the system
scalability.
A set of 100 simulations have beed developed for
each scenario. The areas and their availability are the
same for all simulations. Truck positions have been
created randomly. In all simulations, trucks drivers
have been driving for some time, so, most of them
will have to park in a rest area in the Valencian Com-
munity. The information of trucks and areas for the
100 simulations have been maintained for the three
scenarios.
3.1 A Real Situation Test
In this scenario, the real traffic on heavy good vehi-
cles have been simulated. The information is based
on the Annual Average Daily Traffic (AADT) for the
year 2012. (Fomento, 2012). The AADT varies little
except in the ring-roads areas of the main cities. In
the ring-roads, the intensity is too high because of the
traffic of goods around cities. This intensity has not
been taken into account because drivers do not drive
long distances. In the E-15, the truck AADT is close
to 1100 veh. The truck intensity in this scenario has
been calculated using the traffic flow distribution in
the E-15 during the day and the time used by drivers
to cross the scenario. So, the intensity used in this
scenario is defined to 400 trucks. The capacity of all
areas has been harmonized to 40 places. This has been
done to make easier the results analysis. The results
are presented in figure 3.
Results show how without negotiation there are a
lot of trucks parking in areas without places and they
have to park on ramps, hard shoulders... This situa-
tion is specially difficult in La Marina. These situ-
ations happen because drivers want to reach the far-
thest area. However, applying the negotiation proto-
col, trucks are distributed in the upstreams areas (Sa-
gunto, Picassent and La Safor). In these areas there
are also truck parking without places, but this num-
ber is decreased a lot. This situation happens due to
the random location of trucks and their driving times.
There are no optimal solution where all vehicles have
a parking area.
3.2 Testing the Robustness
To assess the system robustness, the baseline scenario
has been compared with a new scenario where one of
the areas (concretely La Safor) had a problem and it
can not store trucks. This situation can be caused by
different problems: an incident in the area that does
not allow trucks to access it, or communication prob-
lems and the area could not negotiate its reservations.
Figure 4 presents the results of the same simula-
tions but including the simulation without La Safor
area. The results shows how applying the negotiation
trucks are distributed in the area upstreams. However,
without negotiation trucks park in the previous area,
Picassent. This situation is strongly presented in sim-
ulation 14. It is worth to note from these results that
the behavior of the areas far away to the area cancelled
out is quite similar with respect to their behavior when
all areas are available.
So, the system is robust since in spite of the fail-
ure in one of the areas, the system continues working
and trucks start to negotiate with the following areas
according to their preferences.
3.3 Testing the Scalability
To assess the system scalability, the number of trucks
and the number of parking spaces in the areas have
been increased up to 1000 vehicles and 100 parking
places in each area.
The run-time and the number of messages ex-
changed increase linearly. So, there are no problems
to execute the platform and agents in real time. How-
ever, before to conclude the system scalability results
have to be analyzed.
Figure 5 presents the result of increasing the num-
ber of trucks. As in previous scenarios, when the ne-
gotiation protocol is used, trucks try to distribute the
parking in their preferred areas, avoiding, if possible,
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
814
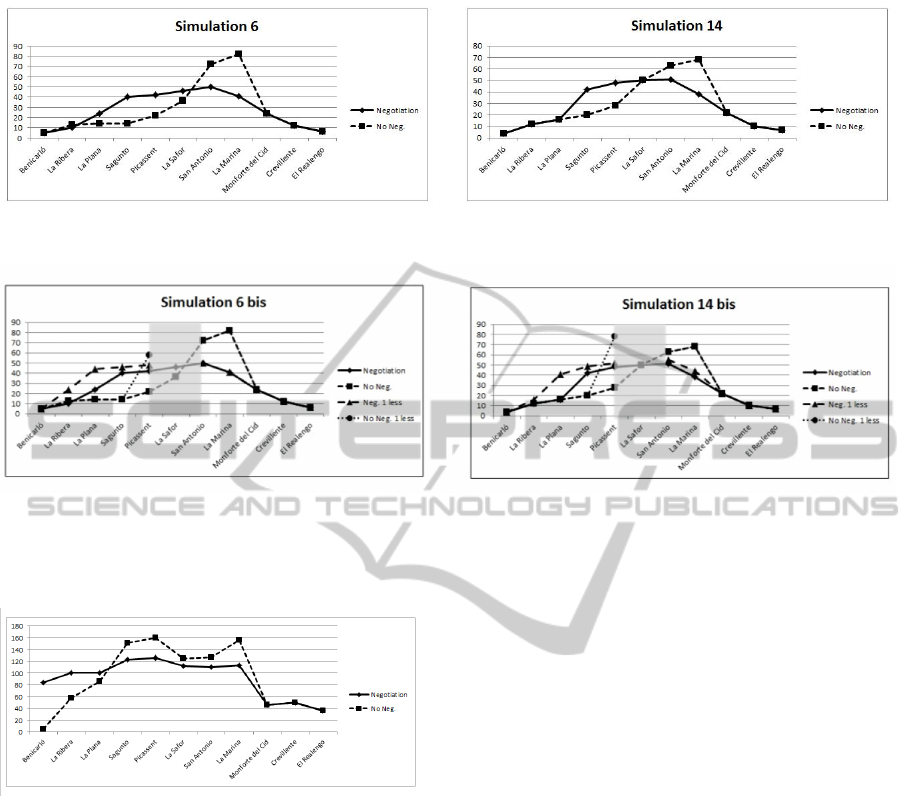
Figure 3: Results of simulation 6 and 14 are presented. The results of parking assignments with and without negotiation are
presented.
Figure 4: Results of simulation 6 and 14 comparing previous scenario and a new one dropping La Safor.
to exceed the areas capacity. This situation does not
happen when the negotiation is not used.
Figure 5: Simulation results increasing the number of trucks
to 1.000.
4 CONCLUSIONS
In this paper, a multiagent system implementing a
new ITP system is presented. The system uses a ne-
gotiation protocol to coordinate the parking of trucks
in rest areas. The ITP protocol tries to guarantee that
all vehicles have a parking space when they reach the
rest area. In this way drivers comply laws about driv-
ing time and rest periods.
This new system improves the current ITP sys-
tems because it takes into account not only the current
parking places but also the preferences of drivers. So,
drivers can know in advance if they have a parking
place reserved.
The negotiation protocol is adapted to the dy-
namic behavior of the traffic. When an area has no
parking places, trucks trying to park in this area start a
negotiation using votes. Each truck votes his best op-
tion from a possible set of solutions. The voting pro-
tocol is a modification of the Borda protocol adapted
to this specific problem.
Negotiation processes and specifically voting sys-
tems always have the possibility of manipulation ei-
ther by coalitions, previous knowledge... In this pa-
per, it is assumed that drivers involved in the negotia-
tion are benevolent. So, if some truck is assigned to an
area that is not his first preference, it parks there. The
system has not been designed from the scratch. Some
agents and the traffic domain ontology have been ex-
tended from previous work. Furthermore, it uses the
FIPA and DATEX II communication standards, so it
is compatible with other existing traffic systems.
Results are very positives and promising. Three
different scenarios were developed to analyze the sys-
tem. In the first scenario, a real situation has been
tested. In all 100 simulations, the results show that
using the system and the negotiation the number of il-
legal parking places is reduced.
In the second scenario, the robustness of the sys-
tem has been tested. To do it, an area was dropped
from the scenario and the results, both using and not
using the negotiation, were compared with the results
of the first scenario. In this situation the illegal park-
ing increases due to the absence of a parking area (40
places less than before). However, using the negoti-
ation the solution improves the results, indicating the
system has the capacity and the ability to deal with
AnAutonomicSystemforIntelligentTruckParking
815

failures in any of its elements.
In the third scenario, the scalability has been
tested. 1000 trucks were in the road. The system
running behavior is not affected in a sensible way.
The run-time and the increase of messages exchanged
does not affect the system. Furthermore, the results
using the negotiation were better again than the re-
sults without using it.
The self management autonomic property of the
system has been demonstrated. This property has
been reached in two levels: a) at individual level,
areas manage their capacity and prevent the excess
of parking and trucks are guaranteed to access to
their preferred area; and b) at network level, although
trucks deal on their preferred areas, the overall sys-
tem performance is greatly improved, since trucks
have information in real-time and illegal parking is
reduced.
Despite the positive results, there are still work to
do. Currently, an improvement of the negotiation pro-
tocol is being developed. This improvement consists
in using the duration of the rest and the speed of trucks
perform a small negotiation between pairs of trucks in
the area, instead of begining a new negotiation among
all trucks with a reservation.
ACKNOWLEDGEMENTS
This work has been supported by a Universitat Jaume
I-Fundaci
´
o Caixa-Castell
´
o research project number
P11B2011-46.
REFERENCES
Alexander Paier, Refi-Tugrul Guner, W. B. (2013). V2X Co-
operative systems On the way to next generations ITS.
Prace Naukowe Politechniki Warzawskiej, Vienna.
Aumund, H.-J. (2004). VIKING Long Distance Corri-
dor Feasibility Study. VIKING TEMPO Programme
MIP03, Hannover.
Capdevila, M., Tom
´
as, V. R., Garc
´
ıa, L. A., and Prades, M.
(2013). Dynamic management of parking spaces with
automatic negotiationt. IEEE International Confer-
ence on Systems, Man, and Cybernetics (SMC).
Commission, E. (2008). Action plan for the deploy-
ment of Intelligent Transport Systems in Europe.
COM/2008/0886. EU, Brussels.
Commission, E. (2010). Directive 2010/40/EU of the euro-
pean parliament and of the council of 7 July 2010 on
the framework for the deployment of Intelligent Trans-
port Systems in the field of road transport and for in-
terfaces with other modes of transport. EU, Brussels.
COST TU1102 (2013-2015). TUD COST Action TU1102,
Towards Autonomic Road Transport Support Systems.
www.cost-arts.org. http://www.cost-arts.org. Vienna.
DATEXII (2014). www.datex2.eu.
EasyWay, P. (2012). DG-FLS-DG01.-Intelligent Truck
Parking and Secure Truck Parking. Deployment guide-
line. EW-DG, Brussels.
Fomento, M. (2012). Heavy good vehicles and hazardous
goods. Traffic Map. http://jade.cselt.it, Madrid.
Foundation for Intelligent Physical Agents, F. (2000). Fipa
interaction protocol library specification.
Kephart, J. and Chess, D. (2003). The vision of autonomic
computing. computer. Computer, 36(1).
Martinez, J., Tomas, V., Martinez, J., and F., S. (2013).
Tmeteosafety: A multiagent system to support the au-
tomated activation of traffic management plans for ad-
verse weather situations. TRB Annual Meeting.
ParkMyRig (2014). The Ultimate Truck Parking Guide -
3nd Edition. http://www.parkmyrig.com/Truck Park-
ing Guide.html. Visited June 2014.
ParkYA, T. (2014). ParYA app. http://parkya.com. Dublin.
Project SETPOS (2014). The european truck information
Portal. http://www.truckinform.eu.
Sndor, Z. P. and Csiszrr, C. (2013). Development Stages
of Intelligent Parking Information Systems for Trucks.
Acta Polytechnica Hungarica.
TILAB (2014). Java Agent Development framework
(JADE). http://jade.cselt.it.
Tomas, V., Marti, I., Saez, A., and Martinez, J. (2012).
Agent-based test-bed for road information systems.
Intelligent Transport Systems, IET, 6(4):404–412.
Vennekens, B. (2014). Parkr system. DATEX User Forum,
Prague.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
816
