
An Insect Inspired Object Tracking Mechanism for
Autonomous Vehicles
Zahra Bagheri
1,2
, Benjamin S. Cazzolato
1
, Stevend D. Wiederman
2
,
Steven Grainger
1
and David C. O'Carroll
3
1
School of Mechanical Engineeing, The University of Adelaide, Adelaide, Australia
2
Adelaide Centre for Neuroscience Research, The University of Adelaide, Adelaide, Australia
3
Department of Biology, Lund University, Lund, Sweden
1 PROJECT SUMMARY
Target tracking is a complicated task from an
engineering perspective, especially where targets are
seen against complex natural scenery. Due to the
high demand for robust target tracking algorithms
much research has focused in this area. However
most engineering solutions developed for this
purpose are either unreliable in real world conditions
or too computationally expensive to be used in many
real-time applications. Insects, such as the
dragonfly, solve this task when chasing tiny prey,
despite their low spatial resolution eye and small
brain suggesting that nature has evolved an efficient
solution for target detection and tracking problem.
This project aims to develop a robust, closed-
loop model inspired by the physiology of insect
neurons that solves this problem, and to integrate
this into an autonomous robot. This system is tested
in software simulations using MATLAB/Simulink.
In near future this system will be integrated with a
robotic platform to examine its performance in real
world environments to demonstrate the usefulness of
this approach for applications such as wildlife
monitoring.
2 STAGE OF THE RESEARCH
This project is started in April 2013 as PhD project
and it is at intermediate stage. The computational
model inspired by physiology of insects has been
tested and optimized using MATLAB/Simulink. The
results of simulations show that the model can
robustly detect and pursue targets of varying contrast
against complex natural backgrounds. The current
stage of this project is implementing this model in a
hardware platform and testing its ability in real
world conditions.
3 OUTLINE OF OBJECTIVES
The aim of this project is to develop a robust,
efficient, and cost effective closed loop algorithm to
track and chase targets for autonomous terrain
robots. This prototype will be designed to track
small objects based on the recent findings from
flying insect behavior and electrophysiological
recordings of their neural system. The objectives of
this project can be categorized as two primary goals:
1- To develop a robust closed loop algorithm
to track and chase targets even against cluttered
background and in the presence of other distracters.
2- To implement the model on a hardware
platform to provide a base for applications such as
surveillance and wildlife monitoring.
4 RESEARCH PROBLEM
Detecting and tracking a small moving object
against a cluttered background is one of the most
challenging tasks for both natural and artificial
visual systems. Due to the increasing demand for
automation, developing a robust tracking algorithm
has been the focus of much research during the last
decade (Cannons, 2008). The potential applications
for such visual target tracking systems include
autonomous vehicle navigation, map building,
surveillance systems, wildlife study, human
assistance mobile robots, and bionic vision. All these
applications and many others identify a common
requirement for technology that can successfully
extract features of interest, track them robustly
within complex environments through long
trajectories and do so even in the presence of other
distractions.
Many algorithms have been developed over the
last decade to address the problem of object
30
Bagheri Z., S. Cazzolato B., D. Wiederman S., Grainger S. and C. O’Carroll D..
An Insect Inspired Object Tracking Mechanism for Autonomous Vehicles.
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

detection and tracking for different scenarios. Most
of these methods use assumptions to simplify the
situations and make the tracking problem tractable.
For instance, smoothness of motion, minimal
amount of occlusion, illumination constancy, high
contrast with respect to background, etc., are the
common simplifications in most of the developed
algorithms (Yilmaz et al., 2006). Consequently,
most of these methods collapse when it comes to
tracking objects in real world situations, within a
distracting environment or in the absence of relative
background motion. Moreover, most of these
methods and techniques involve complex and time
consuming computational mechanisms which
require huge processing capacity that makes them
impractical in many applications. This identifies a
clear need for an alternative and more efficient
approach to solving at least a subset of the target
tracking problem.
While engineering methods try to solve the
problem of target detection and tracking by using
high resolution cameras, fast processors, and
computationally expensive methods, studies of
insect visual systems and flying behavior suggest
there is a simpler solution. Insects are an ideal group
to draw inspiration from in this context since they
have a low spatial acuity visual system, angular
resolution of approximately 1° (Stavenga, 2003),
and a small size, light-weight and low-power
neuronal architecture. Nonetheless, they show
remarkable visual guided behavior in chasing other
insects, e.g. for predation, territorial or mating
behavior, even against complex moving
backgrounds (Collett and Land, 1975, Wehrhahn,
1979) or in the presence of distracting stimuli
(Corbet, 1999, Wiederman and O'Caroll, 2013).
These features have motivated extensive research to
investigate the neural system that underlies
processing for such a complex task.
Electrophysiological recordings have been used to
examine sensitive cells to small moving objects in
different species such as blowfly (Wachenfeld,
1994), dragonfly (O'Carroll, 1993), fleshfly (Gilbert
and Strausfeld, 1991), and hoverfly (Collett and
Land, 1975).
Moreover, flying insects uncouple the eye from
their bodies to actively control their gaze direction
and stabilize the image during flight. This active
gaze control may simplify and improve tracking
strategies for many real-world applications, yet it is
a strategy little used in existing artificial vision
systems that face many of the same problems of
limited spatial and temporal resolution as insects.
Figure 1: Insects must have evolved a relatively simple
and efficient solution to a task that challenges the most
sophisticated robotic vision systems - the detection,
selection and pursuit of moving features in cluttered
environments.
Fortunately, as a result of the recent breakthroughs
in understanding biological vision we are now at a
point where modeling and implementing similar
strategies in an autonomous system is a practical
possibility. This project therefore aims to adopt a
bio-inspired approach to target tracking and pursuit,
based largely on recent research on the insect visual
system, and will implement it on a ground robotic
platform, complete with an active gaze control
system.
5 STATE OF THE ART
Traditionally, computer vision techniques divide the
problem of target tracking into two subproblems:
detection of moving objects and tracking of moving
objects (Ren et al. 2003). Dependent on the method,
object detection might be required in every frame or
when the object first appears in the video (Yilmaz et
al., 2006). The object tracker locates the position of
the target in every frame of the video and generates
its trajectory (Yilmaz et al., 2006). In recent years,
some research has shown that the integration of
image-based target detection and tracking improves
the robustness of the overall system (Wang et al.
2008, Kalal et al. 2012).
5.1 Detection of Moving Objects
In the literature, three typical approaches are used in
object motion detection: optical flow, temporal
difference and background subtraction:
5.1.1 Optical Flow
Optical Flow methods involve calculation of
AnInsectInspiredObjectTrackingMechanismforAutonomousVehicles
31

estimates for local motions in an image, and the
determination of the relocation of each pixel in
sequential image frames. Most optical flow methods
use spatial and temporal partial derivatives to
determine the velocity of each pixel in successive
images. This method is capable of detecting moving
objects even in the presence of camera motion and
background changes, though these changes should
be relatively small due to a ‘smoothness constraint’
(Lu et al., 2008). One common assumption in
developing optic flow algorithms which limits its
applicability in real world scenarios is illumination
uniformity (Zelek, 2002). Furthermore, the
computational complexity of these methods makes
them less suitable for implementation in real-time
applications.
5.1.2 Temporal Difference
These methods find contours of moving objects via
the difference of two successive frames in a multi-
frame image, assuming illumination is constant and
the background is stationary. This method applies a
threshold on the absolute time difference of two
adjacent frames to identify moving objects. The
temporal difference method can effectively
accommodate environmental changes, but it is
usually unable to completely represent shapes of
moving objects. The main advantage of this method
is its simplicity and low computational complexity,
however, it is very sensitive to threshold. A small
threshold causes noisy outcomes, while a large one
leads to losing essential information of the objects
(Yi and Liangzhong, 2010). Moreover, in temporal
difference methods a very fast moving object might
be detected as two distinct objects (Yi and
Liangzhong, 2010).
5.1.3 Background Subtraction
This method is the most popular and developed
method for moving objects detection. This method
uses a reference frame as a “background image” and
this reference frame is kept updated to represent the
effect of varying luminance and geometry settings
(Piccardi 2004). Therefore, the moving objects are
detected by finding the deviation of the current
frame from the background image.
Background subtraction provides high quality
motion information and has less computational
complexity than optical flow. Nevertheless, like the
temporal difference method, it requires a stationary
background scene with respect to the viewpoint and
it is sensitive to scene changes caused by light,
weather etc.
5.2 Tracking of Moving Objects
Methods for tracking of moving objects can be
categorized as (i) discrete feature trackers, (ii)
contour trackers, and (iii) region-based trackers:
5.2.1 Discrete Feature Trackers
Discrete feature trackers use image features such as
discrete points, edges and lines to track an object.
Point trackers match the object frame-to-frame
based on the previous object position and motion.
Both edge trackers and 3D model trackers focus on
line elements of the object as many man-made
objects are composed of numerous straight lines.
The difference between these two classes is whether
or not the tracker uses a three dimensional object
model.
Many successful tracking methods have been
developed based on point trackers (Veenman et al.,
2001, Sahfique and Shah, 2003). The work of
Sahfique and Shah (2003) shows a high level of
accuracy despite a significant level of noise in the
scene. Although some proposed point tracking
methods can cope with occlusions and foreground
clutter, these methods have not effectively addressed
the effect of illumination changes (Cannons, 2008).
The other groups of discrete feature tracking,
edge (Zhang and Faugeras, 1992, Jonk et al., 2001,
Mörwald et al., 2009) and 3D model trackers (Leng
and Wang, 2004, Lepetit et al., 2005), are less
developed compared with point trackers. These
groups of trackers are mostly robust to illumination
since spatiotemporal filtering is applied on their
front end, and they are capable of handling some
extent of occlusion. Unlike the edge trackers, 3D
model based ones can deal with scale changes.
However, both of these methods have mostly been
examined only under simple and controlled
environments. Hence, their performance under real
world conditions and cluttered environments is, as
yet, largely unknown (Cannons, 2008).
5.2.2 Contour Trackers
A contour tracker is defined as any system that
follows a target from frame-to-frame and represents
the target with an open or closed curve that adheres
to its outline. Although both contour trackers and
line trackers track the boundaries of targets within
the scene, line trackers are limited to following
straight line segments. Therefore, since boundary
representation of the contour trackers are drastically
different from a straight line (e.g., a circle), the
ICINCO2014-DoctoralConsortium
32

techniques used for these two types of trackers are
quite different.
Contour trackers have been significantly
improved since their original inception. Different
contour trackers have been proposed (Paragios and
Deriche, 2000, Li et al., 2006, Mansouri, 2002,
Yilmaz et al., 2004, Bibby and Reid, 2008, Bibby
and Reid, 2010) to address some of the issues related
to object tracking, such as automatic initialization
and occlusion. Although these approaches have
successfully solved some issues, none are truly
robust to background clutter.
5.2.3 Region-based Trackers
A region-based tracker is a type of tracker which
represents the target by maintaining feature
information across an area. The types of features that
are used in region trackers include color, texture,
gradient, spatiotemporal energies, filter responses,
and even combinations of the above modalities.
Research based on region trackers shows very
robust results in terms of occlusion (Comaniciu et
al., 2000, Cannons and Wildes, 2007). This class of
trackers can handle background clutter more
robustly than other classes as long as the clutter in
the background is stationary and occlusion is not
significant (Comaniciu et al., 2000, Birchfield and
Rangarajan, 2005, Cannons and Wildes, 2007, Yin
and Collins, 2007). Nonetheless, these types of
trackers are very sensitive to changes in
illumination.
5.3 Estimation Tools
In some tracking research, algorithms tools such as
Kalman filter, Extended Kalman filter, Unscented
Kalman filter, and particle filter have been employed
to enhance the accuracy of target tracking (Boykov
and Huttenlocher, 2000, Li and Chellappa, 2000, Rui
and Chen, 2001, Li et al. 2003).
5.3.1 Kalman Filter and its Variations
The Kalman filter is a prediction and correction tool
which uses the states of the previous time step and
observable measurements to compute a statistically
optimal estimate for the hidden states of a system.
Although a Kalman filter can provide a powerful
estimation tool, it has limitations. The mathematical
model of the Kalman filter assumes that the dynamic
model is linear but some systems are not well-
described by linear equations. Another limitation of
the Kalman filter arises from modeling the
measurement uncertainties by white Gaussian noise
processes. There are many instances where this
simplified model is not appropriate such as tracking
a target throughout a cluttered environment, where
the measurement distribution might not be a
unimodal Gaussian.
The 'Extended Kalman Filter' (EKF) is a
variation of the Kalman filter developed to provide
prediction and correction for non-linear models. In
the extended Kalman filter framework, Taylor series
expansion is used as a linear approximation of non-
linear models. The strength of the EKF lies in its
simplicity and computational efficiency.
Nonetheless, unlike the Kalman filter, the extended
Kalman filter in general is not an optimal estimator.
In addition, due to the extended Kalman filter’s
sensitivity to linearization errors and covariance
calculations, the filter may quickly diverge.
The 'Unscented Kalman Filter' (UKF) is another
popular non-linear variation of the Kalman filter.
The UKF utilizes deterministic sampling methods to
represent the measurement and state variables. The
UKF tends to be more robust and more accurate than
the EKF in its estimation of error. However, neither
the EKF nor the UKF solve the cases where white
Gaussian noise cannot be used as estimation
descriptor of measurement uncertainties.
5.3.2 Particle Filter
A particle filter or sequential Monte Carlo filter
maintains a probability distribution over the state of
the object being tracked by using a set of weighted
samples, or particles. Each 'particle' represents a
possible instantiation of the state of the object. In
other words, each particle is a guess representing
one possible location of the object being tracked and
the denser the portion of particles is at one location,
the more likely the target is there.
The main advantage of a particle filters over a
Kalman filter and its variations is its applicability to
nonlinear models and non-Gaussian noise processes.
Although with sufficient number of samples particle
filters are more accurate than either the EKF or
UKF, when the simulated sample is not sufficiently
large, they might suffer from sample
impoverishment.
The addition of these filters to tracking
algorithms decreases the noise in the image and
produces a more accurate estimation of the position
of a target within the scene. Although the robustness
of described tracking algorithms (Section 5.2)
increases in conjunction with these filters, the
AnInsectInspiredObjectTrackingMechanismforAutonomousVehicles
33

computational complexity associated with these
algorithms still remains an unsolved issue.
5.3.3 Physiological Approaches
As an alternative to the traditional engineering
approaches, there has been recent research which
has used biologically inspired approaches for
detection and tracking. Wiederman et al. (2008)
developed a size selective, velocity tuned, contrast
sensitive bio-mimetic model based on
electrophysiological experiments (Figure 2) from
‘small target motion detector’ (STMD) neurons, in
response to the presentation of various visual
stimuli. This 'elementary small target motion
detector' model (ESTMD) emulates the different
stages of visual processing in flying insects
consisting: (i) fly optics, (ii) photoreceptors, (iii)
large monopolar cells and (iv) rectifying transient
cells.
(i) Optics of the insect compound eye consisted of
thousands of arranged facet lenses which their
diffraction limit the spatial resolution of the eye to
approximately 1°.
(ii) Photoreceptors in the retina dynamically adapt
to background luminance (Laughlin, 1994), reduce
noise and improve the SNR by altering their contrast
gain (Juusola et al., 1994).
(iii) Large Monopolar Cells (LMCs) in the insects'
lamina remove redundant information (Coombe et
al., 1989) by acting as a spatiotemporal contrast
detector (Wiederman et al., 2008).
(iv) Rectifying Transient Cells (RTC) of the
medulla have independent adaptation of ON and
OFF channels (reverse polarities).
Figure 2: Electrophysiological recordings from STMD
neurons. The visual stimuli are displayed, whilst the
electrical potential (spikes) from inside the brain cell is
being recorded.
Recent studies on dragonflies reveal that one type of
STMD neuron, CSTMD1, has a facilitatory role in
tracking targets. The spiking activity of CSTMD1
builds over time in response to targets that move
through long, continuous trajectories (Nordström et
al., 2011). Dunbier et al. (2011, 2012) recorded the
response of these neurons to stimuli traversing in
interrupted paths. These electrophysiological
recordings show that these neurons responses reset
to a naive state when there are large breaks (~7°) in
the trajectory path. This facilitatory mechanism can
enhance the response to weak stimuli. Moreover,
this mechanism directs the attention to the estimated
reappearance location of the object which increases
the robustness of pursuit even if the target is
temporarily invisible. The same analogy can be
found in probabilistic approaches such as Kalman
filtering which provides an optimal estimation of
hidden states of a system by analyzing observable
measurements.
We hypothesize this facilitation underlies the
highly robust target tracking observed in dragonflies.
Therefore, a bio-inspired facilitation is proposed in
this research project to enhance the performance of
the existing bio-inspired models.
Moreover, these types of neurons have shown
competitive selection of one target in presence of
other distracters (Wiederman and O'Carroll, 2013).
Electrophysiological recordings of CSTMD1 neuron
show that irrespective of target size, contrast, or
separation, this neuron selects one target from the
pair and perfectly preserves the original response as
if the distracter was not present (Wiederman and
O'Carroll, 2013). These results bring insight to
robust control of target pursuit in the presence of
other distracters.
5.3.4 Insect Gaze Control
Studies of fly flight behavior show that they control
the direction of flight along with their gaze direction
through short and fast saccadic movements where
their head and body turn independently (Van
Hateren and Schilstra, 1999). This uncoupling of the
eye from its support enables the insect to maintain
the orientation of the gaze even when disturbances
occur which affect its body. Moreover it reduces the
temporal blurring effects and may promote ‘popout’
of a target against a background as a result of the
high-pass nature of key stages of visual processing
During a pursuit, an insect has to control its
forward velocity and distance to the target while
fixating the target in the frontal visual field. Two
different gaze control strategies have been seen
among flying insects (Figure 3); tracking as
described from male houseflies (Wehrhahn et al.
1982) during which a heading is calculated from the
error angle between the target and the central axis of
ICINCO2014-DoctoralConsortium
34
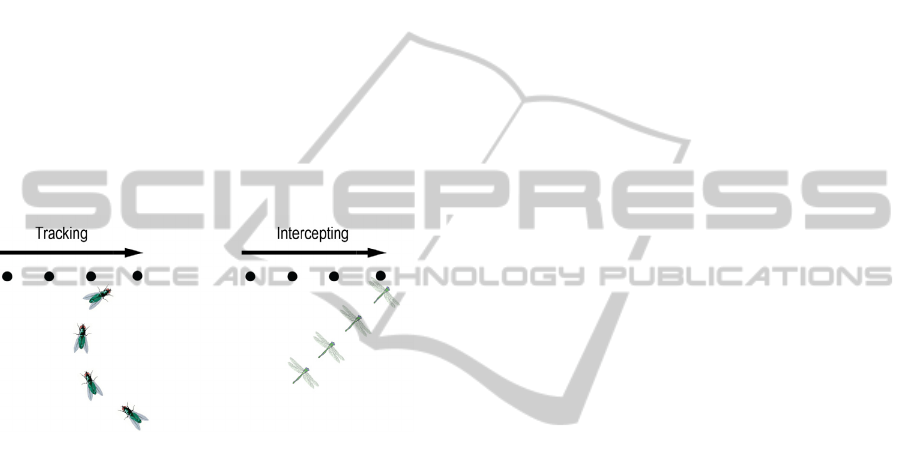
the pursuer’s gaze (Land and Collett 1974,
Wehrhahn et al. 1982); and intercepting as observed
in dragonflies (Olberg et al. 2000) which involves
the calculation of the future trajectory of the target to
intercept its anticipated position. It was found that
dragonflies use steering to minimize the movement
of the prey's image on their retina in order to
estimate the intersection of the target flight
trajectory (Olberg et al. 2000). Using this strategy,
dragonflies chase their target by flying directly to a
point in front of the prey (Olberg et al. 2000). High
prey capture rates in dragonflies seem to be related
to the insect’s ability to maintain its head oriented at
a constant angle with respect to the visual field
(Olberg et al. 2000). Although it is believed that the
pursuit strategy in the dragonfly has a key role in its
high catching rate, to date, the effect of different
pursuit strategies in flying insects have not been
investigated in a robotic platform.
Figure 3: Two main flying insects' pursuit strategies.
6 METHODOLOGY
To achieve the objectives of this research project,
both computational and experimental investigations
will be conducted. The performance of the model
under different conditions has initially been
examined using computational simulation. In the
next stage a robotic platform will be used to further
investigate the performance of the model under
different real world conditions (weather, sunlight,
etc.).
6.1 Computational Methods
For the computational part of this project an
extended version of the previously published
ESTMD model (Wiederman et al., 2008) is used.
The closed-loop pursuit block diagram presented in
Figure 4 is the insect inspired detection and tracking
model which is utilized in the simulations. Different
stages of this model are described briefly in the
following paragraphs.
In order to approximate the spectral sensitivity of
fly photoreceptors that subserve motion processing
(Srinivasan and Guy,1990) and optical blur of an
insect compound eye, this model selects only the
green channel of the RGB input image and applies a
Gaussian spatial blur on it. The output signal goes
through spatiotemporal bandpass filtering which
includes centre-surround antagonism to remove
redundant information in the image, which is
inspired by the same mechanism in photoreceptors
and large monopolar cells. Centre-surround
antagonism is a spatial feature of LMC which
enables edge detection and contrast enhancement. In
the ESTMD model the centre-surround antagonism
is implemented by convolving the image with a
kernel which applies a negative weighting to the
surrounding nearest-neighbor pixels.
The output of early visual processing (Figure 4)
goes through half wave rectification which imitates
the independent ON and OFF channels of insects by
separating reverse polarities. Then each independent
channel is processed via a fast adaptive mechanism.
The fast adaptive mechanism is modeled by using a
fast lowpass filter (τ=3 ms) when the input signal
increases, and a slow lowpass filter (τ=70 ms) when
it decreases. This adaptation process serves to inhibit
repeating bursty inputs, such as noise. Both of the
ON and OFF channels then undergo further centre-
surround antagonism which helps to selectively tune
the model to small sized targets.
The earlier version of the ESTMD model
(Wiederman et al. 2008, Halupka et al. 2011) was
only sensitive to dark targets. But for the purpose of
this project, it has been modified to respond to both
dark and light targets by delaying and multiplying
the relevant contrast polarities (ON and OFF
channels).
In this new computational model developed for
this research project, the facilitation mechanism
observed in the dragonfly CSTMD1 neuron is
implemented by multiplying the output of the
ESTMD model with a lowpass filtered version of a
‘weighted map’ dependent on the location of the
winning feature but offset in the direction of target
motion. This facilitation mechanism increases the
chance of a repetitive winner to be the superior in
the next time step by enhancing the area around the
estimated location of the winning feature. The role
of the lowpass filter time constant here is to control
the period of the time that the facilitation matrix
enhances the area around the winning feature. The
location of the winning feature in the output of
ESTMD model will be used as the target location
and fed into saccadic pursuit algorithm to calculate
AnInsectInspiredObjectTrackingMechanismforAutonomousVehicles
35
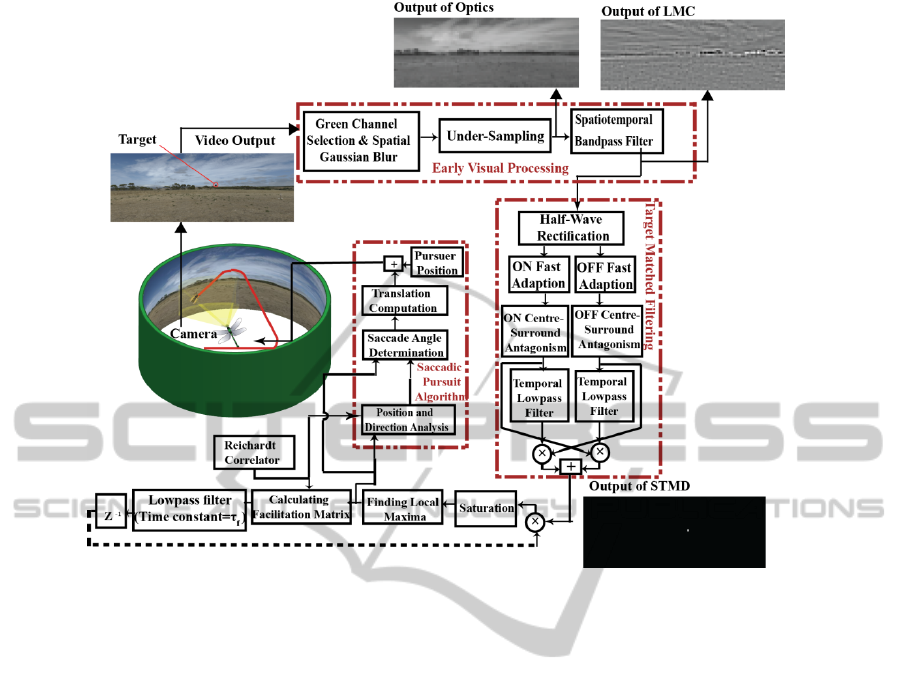
Figure 4: Overview of the closed-loop block diagram of the computational model for simulation and the output of each
stage.
pursuer translation and rotation.
In order to simulate this computational model,
the Simulink 3D Animation Toolbox was used to
create a virtual world as the front-end for the bio-
inspired target detection and pursuit control
algorithm. A cylindrical arena with rendered natural
panoramic images was used as a virtual environment
(Figure 4). In order to move a target within this
environment, randomized three dimensional paths
with biologically plausible constraints on ‘saccadic’
turn angles have been generated. Moreover, the 3D
Animation Toolbox provides the possibility of
embedding 3D objects within this environment to act
as occluding obstacles and foreground clutter.
Within the virtual reality model a viewpoint was
mounted on the pursuer position in these
simulations. The video output of this viewpoint was
fed as an input to the detection and tracking closed-
loop control model.
6.1 Experimental Methods
For the practical part of the project a large payload
(70kg) all-terrain mobile robot developed by
Clearpath Robotics™, Husky A200, will be used as
the platform. This robot operates under Robotic
Operating System (ROS). To test the tracking
algorithm, a Ladybug®2, spherical digital video
camera (Point Grey Inc.) will be integrated with the
Husky to provide a 360° viewpoint of the
environment. The camera control software works
under a Windows server, while ROS is compatible
with Ubuntu. To overcome this problem with
conflicting OSs, a virtualization software package
like VirtualBox is required to load multiple guest
OSs under a single host operating-system (host OS).
The output of the camera will be used as input to the
target detection and tracking model and will be
processed by on board computer (Apple Mac mini).
In the next stage, to test the active gaze control, a
limited view point camera will be mounted on the
robot using a real-time pan-tilt-zoom mechanism,
Yorick, developed by the University of Oxford
(Bradshaw et al. 1994) to actively control the camera
gaze. In order to determine the global position and
orientation of the robot, dGPS and IMU systems will
be utilized. Moreover, IR sensors and possibly
scanning LiDAR will be used to navigate the robot
safely without accident. To test the ability of this
robotic platform to track moving objects a remote
control quadrotor helicopter will be used to navigate
a small object, e.g. a ping-pong ball, in different
ICINCO2014-DoctoralConsortium
36

environment and conditions (e.g. weather, sunlight).
Figure 5: The bio-inspired autonomous robot implements
target detection algorithms derived from
electrophysiological recordings.
7 EXPECTED OUTCOME
Due to the high target density and maneuverability,
high clutter, low visibility arising from terrain
masking, etc., ground target tracking presents unique
challenges not present in tracking other types of
targets. Despite the enormous effort and significant
progress in the field of visual target tracking, the
lack of a robust algorithm capable of tracking
objects in the most complex environments is still
evident. Moreover, most of the developed methods
are computationally expensive and require high
speed processors and high spatial resolution
cameras. The recent studies of insect visual system
and gaze control, suggests that an effective, real-
time and robust bio-inspired method can solve the
visual object tracking problem.
Therefore the expected outcome of this project is
a ground robotic platform which can autonomously
detect and track small moving objects in the most
sophisticated environments. Moreover, this project is
defined to not only contribute to progress of the
active research areas which require robust tracking
algorithms, but also to help raising new questions in
physiology as well. A hardware implementation of
the proposed tracking algorithm can reveal the limits
of the underlying systems for real world application
and raise new questions to investigate the solutions
that have evolved in the insect neural system
REFERENCES
Bibby, C., & Reid, I., 2010. Real-time tracking of multiple
occluding objects using level sets. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
, 1307-1314.
Bibby, C., & Reid, I. 2008. Robust real-time visual
tracking using pixel-wise posteriors. In Computer
Vision–ECCV, Springer Berlin Heidelberg, 831-844.
Birchfield, S.T., & Rangarajan, S., 2005. Spatiograms
versus histograms for region-based tracking. In IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition, 2: 1158-1163.
Boykov, Y., & Huttenlocher, D.P., 2000. Adaptive
Bayesian recognition in tracking rigid objects. In IEEE
Conference on Computer Vision and Pattern
Recognition, 2 : 697-704.
Bradshaw, K.J., McLauchlan, P. F. Reid, I. D., & Murray,
D.W., 1994. Saccade and pursuit on an active head/eye
platform. Image and Vision Computing, 12(3): 155-163.
Comaniciu, D., Ramesh, V., & Meer, P., 2000. Real-time
tracking of non-rigid objects using mean shift. In IEEE
Conference on Computer Vision and Pattern
Recognition. Proceedings, 2: 142-149.
Cannons, K., 2008. A review of visual tracking. Dept.
Comput. Sci. Eng., York Univ., Toronto, Canada,
Tech. Rep. CSE-2008-07.
Cannons, K., & Wildes, R., 2007. Spatiotemporal oriented
energy features for visual tracking. In Computer
Vision–ACCV, Springer Berlin Heidelberg, 532-543.
Collett, T. S., & Land, M. F., 1975. Visual control of flight
behaviour in the hoverfly Syritta pipiens L. Journal of
Comparative Physiology, 99(1): 1-66.
Coombe, P.E., Srinivasan, M.V., & Guy, R.G., 1989. Are
the large monopolar cells of the insect lamina on the
optomotor pathway? Journal of Comparative
Physiology A: Neuroethology, Sensory, Neural, and
Behavioral Physiology, 166(1): 23-35.
Corbet, P.S., 1999. Dragonflies: Behavior & Ecology of
Odonata, Ithaca, Cornell Univ Press.
Dunbier, J.R., Wiederman, S.D., Shoemaker P.A. &
O’Carroll, D.C., 2012. Facilitation of dragonfly target-
detecting neurons by slow moving features on
continuous paths. Frontiers in Neural Circuits, 6(79).
Dunbier, J.R., Wiederman, S.D., Shoemaker P.A., &
O’Carroll, D.C., 2011. Modelling the temporal response
properties of an insect small target motion detector, In
IEEE 7th International Conference on Intelligent Sensors,
Sensor Networks and Information Processing (ISSNIP),
125-130.
Gilbert, C., & Strausfeld, N.J., 1991. The functional
organization of male-specific visual neurons in flies.
Journal of Comparative Physiology A, 169(4): 395-411.
Halupka, K.J., Wiederman, S.D., Cazzolato, B.S., &
O'Carroll, D.C., 2011. Discrete implementation of
biologically inspired image processing for target
detection. In Seventh International Conference on
Intelligent Sensors, Sensor Networks and Information
Processing (ISSNIP), 143-148.
Jonk, A., van de Boomgaard, R., & Smeulders, A.W.,
2001. A line tracker. Internal ISIS report, Amsterdam
University.
Juusola, M., Kouvalainen, E., Järvilehto, M., &
Weckström, M., 1994. Contrast gain, signal-to-noise
ratio, and linearity in light-adapted blowfly
photoreceptors. The Journal of General Physiology,
104(3): 593-621.
AnInsectInspiredObjectTrackingMechanismforAutonomousVehicles
37

Kalal, Z., Mikolajczyk, K. & Matas, J., 2012. Tracking-
Learning-Detection. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 34(7): 1409-1422.
Land, M. F., & Collett, T. S., 1974. Chasing behaviour of
houseflies (Fannia canicularis). Journal of
Comparative Physiology, 89(4): 331-357.
Laughlin, S.B., 1994. Matching coding, circuits, cells, and
molecules to signals: general principles of retinal
design in the fly's eye. Progress in Retinal and Eye
Research, 13(1): 165-196.
Leng, J., & Wang, H., 2004. Tracking as recognition: a
stable 3D tracking framework. In 8th IEEE
Conference on Control, Automation, Robotics and
Vision, 3: 2303-2307.
Lepetit, V., Lagger, P., & Fua, P., 2005. Randomized trees
for real-time keypoint recognition. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, 2:775-781.
Li, K., Miller, E.D., Weiss, L.E., Campbell, P.G., &
Kanade, T., 2006. Online tracking of migrating and
proliferating cells imaged with phase-contrast
microscopy. In IEEE Conference on Computer Vision
and Pattern Recognition Workshop, 65-65.
Li, P., Zhang, T., & Pece, A.E., 2003. Visual contour
tracking based on particle filters. Image and Vision
Computing, 21(1): 111-123.
Li, B., & Chellappa, R., 2000. Simultaneous tracking and
verification via sequential posterior estimation. In
Proceedings of IEEE Conference on Computer Vision
and Pattern, 2: 110-117.
Lu, N., Wang, J., Wu, Q.H., & Yang, L., 2008. An
improved motion detection method for real-time
surveillance. IAENG International Journal of
Computer Science, 35(1): 1-10.
Mansouri, A.R., 2002. Region tracking via level set PDEs
without motion computation. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 24(7),
947-961.
Mörwald, T., Zillich, M., & Vincze, M., 2009. Edge
tracking of textured objects with a recursive particle
filter. In Proceedings of the Graphicon.
Nordström, K., Bolzon, D.M., & O'Carroll, D.C., 2011.
Spatial facilitation by a high-performance dragonfly
target-detecting neuron. Biology letters, 7(4): 588-592.
O'Carroll, D., 1993. Feature-detecting Neurons in
Dragonflies. Nature, 362: 541-543.
Olberg, R.M., Worthington, A.H., & Venator, K.R., 2000.
Prey pursuit and interception in dragonflies. Journal of
Comparative Physiology A, 186(2): 155-162.
Paragios, N., & Deriche, R., 2000. Geodesic active
contours and level sets for the detection and tracking
of moving objects. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 22(3), 266-280.
Piccardi, M. 2004. Background subtraction techniques: a
review. In IEEE International Conference on Systems,
Man and Cybernetics, 4: 3099-3104.
Ren, Y., Chua, C.S., & Ho, Y.K., 2003. Motion detection
with nonstationary background. Machine Vision and
Applications, 13(5-6), 332:343.
Rui, Y., & Chen, Y., 2001. Better proposal distributions:
Object tracking using unscented particle filter. In
Proceedings of IEEE Computer Society Conference on
Computer Vision and Pattern Recognition, 2: 786-793.
Shafique, K. & Shah, M., 2003. A non-iterative greedy
algorithm for multi-frame point correspondence. In
IEEE International Conference on Computer Vision,
110-115.
Srinivasan, M.V., & Guy, R.G.,1990. Spectral properties
of movement perception in the dronefly Eristalis.
Journal of Comparative Physiology A, 166(3), 287-
295.
Stavenga, D., 2003. Angular and spectral sensitivity of fly
photoreceptors. I. Integrated facet lens and
rhabdomere optics. Journal of Comparative
Physiology A, 189(1): 1-17.
Van Hateren, J. H. , & Schilstra, C., 1999. Blowfly flight
and optic flow. II. Head movements during flight.
Journal of Experimental Biology, 202(11), 1491-1500.
Veenman, C.J., Marcel J.R, & Eric Backer, 2001.
Resolving motion correspondence for densely moving
points. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 23(1): 54-72.
Wachenfeld, A., 1994. Elektrophysiologische
Untersuchungen und funktionelle Charakterisierung
männchenspezifischer visueller Interneurone der
Schmeissfliege Calliphora erythrocephala. Doctoral
dissertation, Universität Köln.
Wehrhahn, C., 1979. Sex-specific differences in the
chasing behaviour of houseflies (Musca). Biological
Cybernetics, 32(4): 239-241.
Wiederman, S.D., O’Carroll, D.C., 2013. Selective
Attention in an Insect Visual Neuron. Current Biology,
23:156-161.
Wiederman, S.D., Shoemaker, P.A., & O'Carroll, D.C.,
2008. A model for the detection of moving targets in
visual clutter inspired by insect physiology. PloS One,
3(7):1-11.
Yi, Z., & Liangzhong, F., 2010. Moving object detection
based on running average background and temporal
difference. In IEEE International Conference on
Intelligent Systems and Knowledge Engineering
(ISKE), 270-272.
Yilmaz, A., Javed, O., & Shah, M., 2006. Object tracking:
A survey. ACM Computing Surveys (CSUR), 38(4):
13.
Yilmaz, A., Li, X., & Shah, M., 2004. Contour-based
object tracking with occlusion handling in video
acquired using mobile cameras. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 26(11),
1531-1536.
Yin, Z., & Collins, R., 2007. Belief propagation in a 3D
spatio-temporal MRF for moving object detection. In
IEEE Conference on Computer Vision and Pattern
Recognition, 1-8.
Zhang, Z., & Faugeras, O.D., 1992. Three-dimensional
motion computation and object segmentation in a long
sequence of stereo frames. International Journal of
Computer Vision, 7(3), 211-241.
Zelek, J.S., 2002. Bayesian real-time optical flow. In
Vision Interface, 266-273.
ICINCO2014-DoctoralConsortium
38
