
Self-reorganizing Dynamic Formations of Mobile Autonomous Robots
for Communication Network Optimization
Philip Necsulescu and Klaus Schilling
Chair of Computer Science VII, Universit¨at W¨urzburg, W¨urzburg, Germany
1 STAGE OF THE RESEARCH
This doctoral research intends to study a method to
autonomously self reorganize a formation of mobile
robots to optimize network performance.
Currently, a program has already been developed
that allows the robots to retrieve the received signal
strength of their neighbours along with positional in-
formation of themselves and their neighbours. A rout-
ing protocol has also been developed and tested that
uses the signal strength. It is intended to improve
this protocol with the addition of positional data of
each robot. Further studies will be conducted in un-
common environments, such as underground mines,
to further its applications.
Control algorithms have been developed and sim-
ulated to autonomously reorganize a small forma-
tion of car like robots to optimize communication
links. These algorithms will also be used to auto-
matically set up communication networks using drop-
pable, non-moving routing nodes. Along with being
simulated, experiments will be conducted in physical
environments.
2 OUTLINE OF OBJECTIVES
Although a lot of routing protocols for MANETs al-
ready exist and have been thoroughly simulated, there
has been little actual experimentation in realistic en-
vironments and scenarios. Using the signal strength
of each connection to establish routing is also a rarity,
especially in actual implementations on robots. Rel-
ative distance of each robot will also be used to im-
prove route selection.
Expending on studying the use of signal strength
for routing in MANETs, the PhD work will also
design and implement control algorithms for au-
tonomous topology control of swarms of robots to op-
timize communication network performance.
Both the routing algorithms and the autonomous
control of swarms will be studied in various environ-
ments, including indoors, outside, and in underground
environments.
The main objectives of this work are:
• Develop a routing protocol based on signal
strength.
• Incorporate relative distance information in rout-
ing protocol.
• MANET routing protocol experimental studies
and comparisons with various route cost calcula-
tion equations.
• Develop algorithm for placement of robots and
autonomous reorganization of their topology in a
swarm towards the goal of optimizing the commu-
nication network.
• Simulations of the robot control algorithm au-
tomation.
• Experimental studies of automatic placement of
robots and their autonomous self reorganization
towards the goal of optimizing the MANET‘s per-
formance..
3 RESEARCH PROBLEM
The field of swarm robotics is quickly expending.
One on the key issues in controlling a swarm of robots
is the communication between the operator and the
robots, and between the robots themselves. The com-
munication network used by these swarms is typically
called a Mobile Ad-Hoc Network. (MANET).
MANETs generally use the IEEE 802.11 stan-
dard for wireless computing. Their dynamic nature
required routing protocols to be used as the routes
cannot be manually reprogrammed as with fixed and
static networks. The use of signal strength of each
individual link between the agents in the MANET
requires the extraction of this information, the link
cost calculation, its propagation throughout the net-
work, and the total route cost calculation. This raises
some issues such as the amount of processing power
48
Necsulescu P. and Schilling K..
Self-reorganizing Dynamic Formations of Mobile Autonomous Robots for Communication Network Optimization.
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

required and the amount of network overhead, espe-
cially when scaling to very large MANETs.
It is hoped that by using signal strength, along
with incorporating relative distance information for
cost calculations and studying various cost calculation
equations for different environments, the new proto-
col can improve the MANET performance under vari-
ous scenarios where other common protocols perform
poorly or fail. The main metric that is targeted is the
time needed for routing change, therefore reducing
the amount of time to establish a new route when a
link is broken. Other targeted metrics are reducing
latency and increasing bandwidth.
When controlling a swarm of robots, some of the
robots are normally autonomous. With only one op-
erator normally, only one robot can be controlled at
a time, the others must act autonomously, or remain
idle. The issue of controlling the autonomous robots,
with the scope of optimizing the MANET, is also a
main goal of this research.
4 STATE OF THE ART
Routing based on signal strength has been discussed
since the first uses of MANETs, however, most of the
common wireless routing protocols do not make use
of this information. The proposed routing protocols
are rarely implemented and are usually only studied
in simulations.
The Signal Strength based Adaptive Routing
(SSA) Protocol is described in (Dube et al., 1997).
The protocol is a reactive protocol that selects routes
based on their continuous link connectivity duration
and the average signal strength of the connection.
SSA is composed of two separate protocols. The
Static Routing Protocol (SRP) is used to retrieve and
record the signal strength information in the signal
stability table. The second part, the Dynamic Rout-
ing Protocol (DRP), maintains the routing table.
Using the beacons sent by the wireless adapters
firmware, the signal strength is simply classified as
either strongly or weakly connected. The length of
time that the beacons have been continuously received
over that link is also stored. When a node attempts
to forward a packet, it first searches for a route in the
routing table maintained by DRP. If the route does not
exist, a route search is initiated. When a route is bro-
ken, the node that is attempting to forward the packet
will notify the source node, which will then search for
another route. If the notification of the broken route
is unable to arrive to the source, the source will send
a request for a new route after a timeout period.
The route selected will use only strongly con-
nected links when possible. If a route consisting
solely of strongly connected links is unavailable, it
will search for a route that includes weakly connected
links.
The SSA routing protocol is simulated and com-
pared with a simple routing algorithm that chooses
the smallest number of hops. It is determined that the
SSA routing protocol significantly reduced the num-
ber of route reconstructions vs. the simple hop min-
imizing algorithm. The usefulness of the continuous
connectivity lifetime is found to vary greatly depend-
ing on the scenario and must be configured properly
for each case. It does not seem that this protocol has
been implemented outside of a simulation environ-
ment.
A mechanism to improve TCP performance in ad-
hoc networks using signal strength is proposed by
(Klemm et al., 2005). It is found that the causes
of 802.11 link performance degradation can be at-
tributed to congestion of the shared channel medium
or to the mobility of the nodes. The paper‘s objectives
are to reduce the packet losses due to the mobility of
nodes in MANETs.
Suggestions to reduce link failures are made to re-
act to the loss of a link. When a link failure is de-
termined to be due to a node moving out of range,
the transmission power of the network adaptor is tem-
porarily increased and a search for a new route is ini-
tiated. Care is taken not to include routes of links that
have temporarily increased transmission power. By
using signal strength information, it is possible to de-
termine when a route is approaching failure and then
pro-activelysearch for a new route. If the route degra-
dation is due to congestion and it is determined that
the neighbour is most probably in range from prior
signal strength data, the node will persist overa longer
period of time to communicate with its neighbour in-
stead of searching for better routes.
A problem is found that signal strength degrades
as the networks channel becomes congested. To de-
termine if the links degradation is due to congestion
or due to the node moving out of range, the number
of packets overheard by the node is counted. If the
count is large, then the degradation can be attributed
to channel congestion. Care must be taken not to in-
crease transmission power in this case as it can lead
to further deterioration of the communication link.
It is determined through simulations using net-
work simulator 2 that under low load, the TCP per-
formance is increased by up to 75%. On a congested
network under heavy load, TCP performance is in-
creased by 14-30%. TCP performance is determined
from the number of packets lost.
In the above papers, by using simulations, the use
Self-reorganizingDynamicFormationsofMobileAutonomousRobotsforCommunicationNetworkOptimization
49
of signal strength information in route finding is dis-
covered to be very beneficial. It is however very rare
to find any of these proposals implemented and tested
on real hardware. Because loss in signal strength and
network performance can be due to multiple causes,
further improvement in routing can be accomplished
by determining its cause.
(Necsulescu and K.Schilling, 2013) investigated
the cost calculation and performance evaluation for a
signal strength based MANET routing protocol. In
this paper, a signal strength based routing protocol
is evaluated. The evaluation consists of an experi-
ment where a mobile, car-like robot, is remotely op-
erated down a hallway with multiple network access
nodes located in the offices. This results in a dynamic,
multi-hop WiFi network. A camera is mounted to the
front of the robot providing live video streaming for
the operator. The performance of the protocol is then
evaluated with respect to video frames received per
section for various parameters. Results using BAT-
MAN, OLSR, and BABEL protocols are also pro-
vided for comparison.
(Qian et al., 2012) and (Nagatani et al., 2011) pre-
sented interesting results regarding the use of signal
intensity in controlling robot motion for the case of
nuclear radiation source finding. These results were
found relevant for the development of the robot con-
trol using signal intensity in this paper.
5 METHODOLOGY
5.1 Signal Strength Routing Protocol
The calculation of the cost of a link between two
nodes is derived from the free space path loss of radio
waves. The path loss can also be denoted as the lo-
cal average received signal power at the receiver node
relative to the transmission power of the transmission
node. The equation for path loss ( 1) is retrieved from
(Andersen et al., 1995):
L = L(d
0
) + 10∗ n∗ log
10
d
d
0
+ X
0
(1)
Where: L = path loss in (dB), d is distance in m,
L(d
0
) is the path loss at a known, close distance d0, n
is the power law relationship between distance and re-
ceived power, and X
o
is a zero mean Gaussian random
variable
By letting X
0
= 0, d
0
as 4π/λ, L(d
0
) = 0(L →
0 as d → 0), and n = 2 for free space as specified by
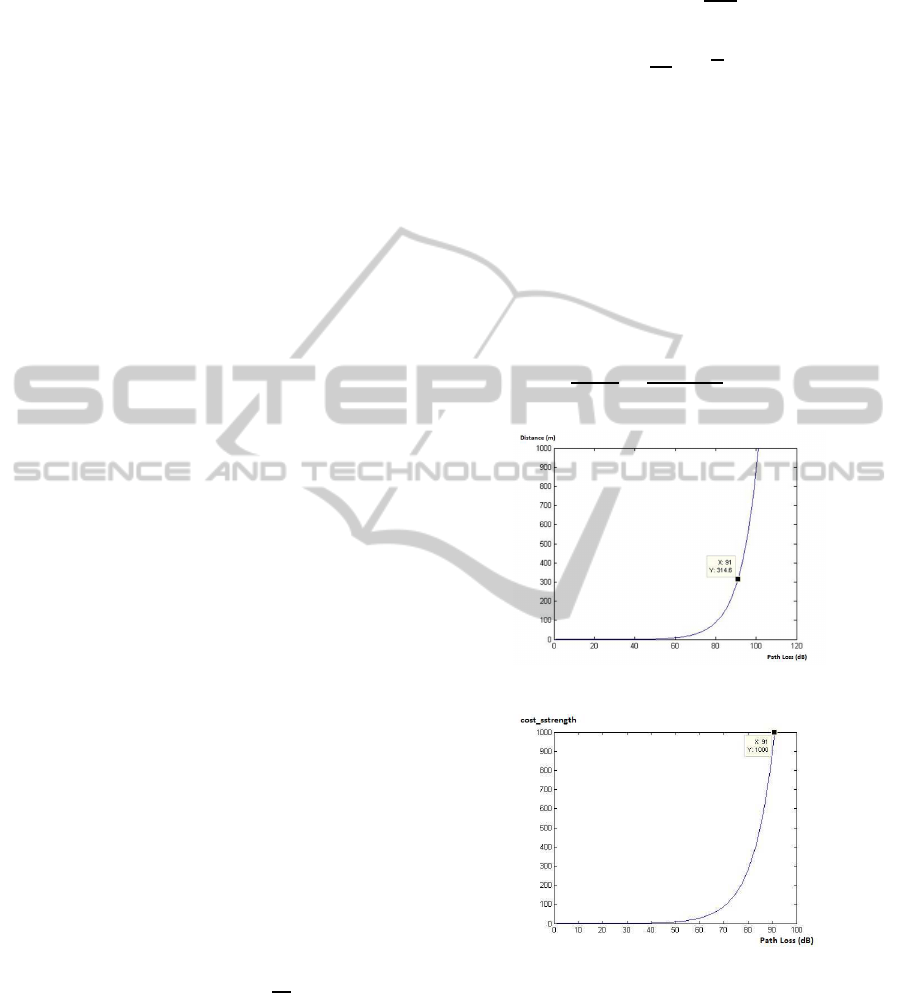
(Andersen et al., 1995), the path loss becomes ( 2). It
is then solved for d in ( 3), which is shownin Figure 1.
L = 20log
10
4πd
λ
(2)
d =
λ
4π
∗ 10
L
20
(3)
Through experimentation, it was determined that
the connection between two nodes becomes unusable
around 91-92dB. A cost of 1000 is therefore chosen
to represent 91dB, which corresponds to a distance
of 314.6m from equation ( 3), or d = 314.6 for L =
91dB. To assign a cost of 1000 for the value of 91dB,
( 3) is multiplied by the constant a.
cost
strength
= a ∗ d (4)
where:
a =
1000
L(91)
=
1000
314.5576
= 2.8334 (5)
Figure 1: Distance with respect to path loss.
Figure 2: Cost Calculated from Path Loss.
An experiment was conducted to test this protocol
and compare its performance against other commonly
used wireless routing protocols.
The experiment consists of a mobile node and
three fixed nodes. The fixed nodes are identical
Lenovo X61t laptops with Intel based WiFi adap-
tors. The mobile node is a 4 wheeled car like robot
which has an on-board x86 PC with an Atheros5000
based WiFi network adaptor. The laptops are run-
ning Xubuntu 12.04 and the mobile robot is running
ICINCO2014-DoctoralConsortium
50
Ubuntu 12.04 Server. An AXIS IP camera is mounted
to the front of the mobile robot.
An operator, using a laptop, sits in a corner office.
The two other laptops are placed such that the opera-
tor and the farthest laptop have no direct connection.
The transmission values of the laptop and robot WiFi
adaptors were modified as well and automatic power
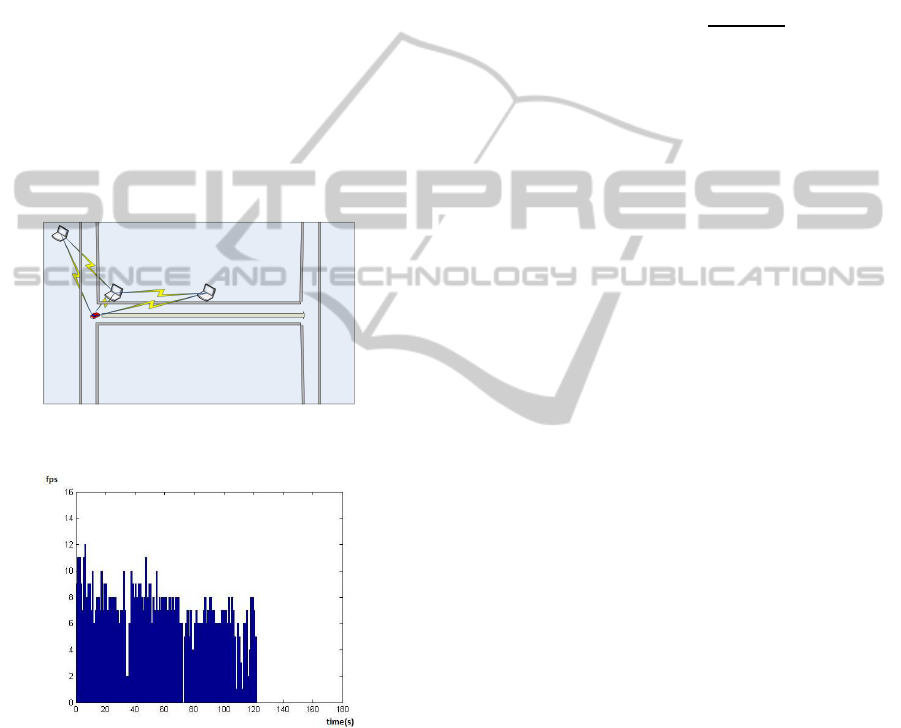
management turned off. The robot is then placed at
one end of the corridor and is driven remotely by the
operator to the other end. The route changes accord-
ing to the signal strengths. The initial setup of the
experiment is shown in Figure 3.
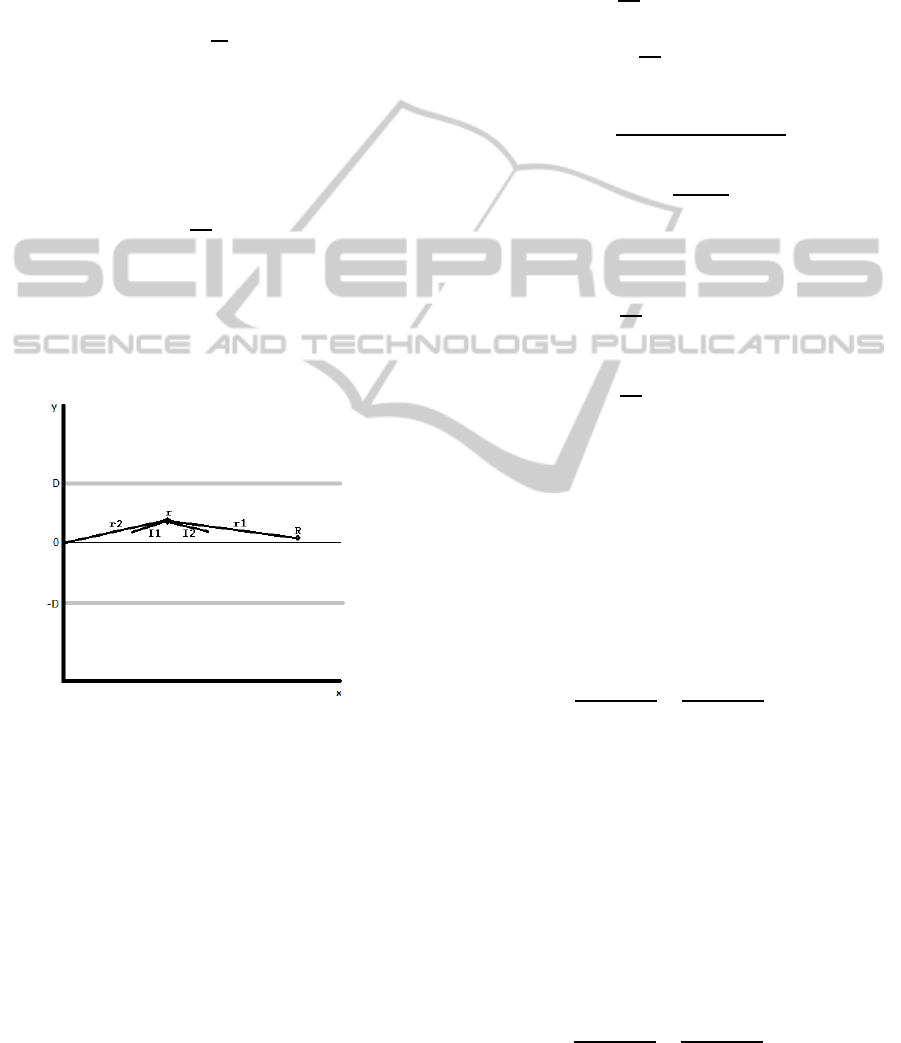
The signal strength routing protocol performed
better than OLSR and BABEL routing protocol and
was comparable to the performance of BATMAN in
this experiment. A historgram of best performance of
the FPS received for the signal strength routing proto-
col for this experiment is shown in Figure 4.
Figure 3: Signal Strenght Routing Protocol Experiment
Setup.
Figure 4: Best Result from Various Parameters of the Signal
Strength Routing Protocol.
Future experimentation using different cost func-
tions as well as more complex scenarios are planned.
5.2 Addition of Distance to Routing
Protocol
The absolute distance of each robot is determined by
using odometry. This is achieved by using the on-
board gyroscope and encoders. The absolute distance
is then kept track of by each robot through dead reck-
oning, and then broadcast throughout the MANET.
After calculating the relative distance the route
score is calculated using path loss equation stated in
(Andersen et al., 1995). Similar to the determination
of the cost function due to signal strength, the cost
function uses the same derivation for cost, however,
the right hand side of the Equation is inverted. This is
shown in ( 6).
cost
dist
= 270log
10
4πd
relative
λ
(6)
Only preliminary testing of this protocol has been
finished. Further work to combine this information
along with signal strength into the routing protocol
is still needed. Future experiments are planned to test
the newcost calculation method along with trying var-
ious cost calculation equations.
5.3 Automation of Swarm Agents with a
Dynamic Topology to Optimize
Communication Network
Swarms of robots often have un-predictable forma-
tions due to their dynamic nature. When a swarm
moves or expends to a new area, the topology
changes. Due to these topology changes, the distances
between the various swarm agents also change, their
neighbours change, and therefore, the routes will also
change. In this section of the doctoral work, we look
at optimizing the topology of the swarm to improve
network communication performance. This is accom-
plished by developing control algorithms for the au-
tonomous robots such that they place themselves in
such a way as to optimize the network.
As a first step to accomplishing this, we develop a
control algorithm and a Matlab simulation of a simple
case with two mobile robots and one operator. The
operator will operate one of the robots down a hall-
way, while the other robot is autonomous and places
itself in such a way as to maintain a good connection
with the operated robot.
5.3.1 Control Algorithm Formulation
An intermediate robot is assumed to be autonomous
with a controller that searches for locations that most
efficiently relay the signal from a fixed station to the
tele-operated robot to increase operational range and
network performance. In contrast to the case of tra-
ditional robot control where a desired position is de-
fined, in this case such a position has to be found by
the robot while moving (Qian et al., 2012) and (Na-
gatani et al., 2011).
Self-reorganizingDynamicFormationsofMobileAutonomousRobotsforCommunicationNetworkOptimization
51
In actual applications signal intensity at a relay
robot is obtained from measurement on board (An-
dersen et al., 1995) and (Klemm et al., 2005). For
simulations signal intensity has to be calculated as-
suming known relative distance d of the source with
regard to the relay robot.
The signal intensity I(d) in dB, at a distance d
from the signal source with intensity I(0), is subject
to a logarithmic loss 20log[
2π
λ
d]. The radio engineer
formula that is based on the Friis transmission equa-
tion (Gaertner and Nuallain, 2012) and (Necsulescu
and K.Schilling, 2013), is
I(d) = I(0) − L(d)
= I(0)
= I(0) − 20log
2π
λ
d
(cosθ − jsinθ)
(7)
It is assumed that the position vectors of the in-
termediate robot, located at (x
r
,y
r
) with regard to the
tele-operated robot d1 , located at (X,Y), and with re-
gards to the fixed base, d
2
are known at all times (See
Figure 5).
Figure 5: Schematic of Hallway Experiment.
d
1
= d
1
(cosθ
1
= jsinθ
1
) (8)
d
2
= d
2
(cosθ
2
= jsinθ
2
) (9)
Intermediate robot control should drive the robot
toward where the signal intensity vectors, I
1
and I2
are:
I
1
= I
1
(cosθ
1
= jsinθ
1
) (10)
I
2
= I
2
(cosθ
2
= jsinθ
2
) (11)
I
1
and I
2
are along the vectors d
1
and d
2
. While the
signal strength I
1
and I
2
are sensed on board, the an-
gles are determined from the relative position vectors
d
1
and d
2
.
The controller of the intermediate robot has to find
the position of the robot where the difference I
1
− I
2
becomes insignificant, where:
I
1
− I
2
=
(I
1
(0) − 20log
2π
λ
d
1
(cosθ
1
− jsinθ
1
)
− (I
2
(0) − 20log
2π
λ
d
1
(cosθ
2
− jsinθ
2
)
(12)
for
d
1
=
q
(X − x
r
)
2
+ (Y − y
r
)
2
(13)
d
2
=
q
x
2
r
+ y
2
r
(14)
Signal loss vectors are given by:
L
1
(d
1
) = 20log
2π
λ
|d
1
|
(cosθ
1
− jsinθ
1
) (15)
L
2
(d
2
) = 20log
2π
λ
|d
2
|
(cosθ
2
− jsinθ
2
) (16)
A second goal of the intermediate robot is to avoid
collisions during motion. Here, collision avoidance
will be presented for the case that the robots move
in a corridor of width 2D, assumed for convenience
along x-axis (See Figure 5).
The distance of the intermediate robot with regard
to the upper wall at y = D is D− y
r
and with regard to
the lower wall at y = −D is D+ y
r
(See Figure 5). Ve-
locity command to avoids collisions with these walls
is given by:
−1
D− y
r
+ ε
+
1
D+ y
r
− ε
(17)
where ε, of a very small value, is included to avoid
singularities. These functions give zero velocity com-
mand when y
r
= 0 and 1/ε, a very large value, when:
y
r
= D or y
r
= −D (18)
The velocity command vector for the intermediate
robot results as
v
d
=
− K{[I
1
(0) − L
1
(d
1
)](cosθ
1
+ jsinθ
1
)
− [I
2
− L
2
(d
2
)](cosθ
2
+ jsinθ
2
}
+ jK
B
−1
D− y
r
+ ε
+
1
D+ y
r
− ε
(19)
or, after separating real and imaginary part:
ICINCO2014-DoctoralConsortium
52

v
d
=
− K{[I
1
(0) − L
1
(d
1
)]cosθ
1
− [I
2
− L
2
(d
2
)](cosθ
2
}
+ j{[I
1
(0) − L
1
(d
1
)]sin[I
2
(0) − L
2
(d
2
)]sinθ
2
}
+ jK
B
−1
D− y
r
+ ε
+
1
D+ y
r
− ε
(20)
K and K
B
are gains to be determined at the con-
troller design stage.
In actual applications, I
1
and I
2
are obtained from
on-board signal intensity measurement, while the rel-
ative distances D− y
r
of the relay robot with regard
to the upper wall and with regard to the lower wall
D+ y
r
are obtained from on board proximity sensors.
Denoting:
v
d
= A + jB (21)
Results in:
v
d
=
p
A
2
+ B
2
(22)
θd = tan
−1
B
A
(23)
After each iteration the new position of the inter-
mediate robot is calculated as:
x
r
(t + ∆t) = x
r
(t) + v
d
∆tcosθ
d
(24)
y
r
(t + ∆t) = y
r
(t) + v
d
∆tcosθ
d
(25)
The results of the simulation showed that the
equations work and appear to be suitable for use in
controlling a robot.
In Figure 6, the x position of both the tele-operated
and relay robot are plotted with respect to time. It is
shown that the relay robot places itself at the point
where the signal intensities are equal.
Figure 6: X-position of tele-operated robot and relay robot
with respect to time.
In Figure 7, the magnitude of the velocity of the
relay robot is shown. The maximum speed it reaches
is 0.8m/s which is reasonable for robotus in an indoor
environment.
Figure 7: Absolute value of velocity with respect to time.
Future work is planed to do the simulation in an
experiment in the hallway used for the signal strength
routing experiment. Further work is also planned to
expend the method for more complicated scenarios
and to simulate those scenarios.
6 EXPECTED OUTCOME
At the end of the PhD work, it is hoped that the fol-
lowing is accomplished:
• A new routing protocol, customizable to use sig-
nal strength and/or distance, adaptable to the en-
vironment, and with different possible route cost
functions is completed. It is hoped that it can im-
prove performance and a variety of different envi-
ronments and scenarios.
• Methods to automate swarm agents for commu-
nication network optimization are developed and
simulated. It is hoped to also use these methods
in actual deployments and realistic scenarios with
dynamic topologies.
• To develop methods to setup wireless communi-
cation networks autonomous by using static rout-
ing nodes that are dropped by an autonomous
robot. The placement of these nodes will be op-
timized through various techniques, including the
use of 3D mapping. The above developed routing
protocols will also be tested on these networks.
• Further expansion of the different technologies to
be used in uncommon environments, such as un-
derground mines, with harsh conditions. This in-
cludes high humidity, poor lighting, and large lev-
els of airborne particles.
REFERENCES
Andersen, J., Rappaport, T., and Yoshida, S. (1995). Prop-
agation measurements and models for wireless com-
munications channels. Communications Magazine,
IEEE, 33(1):42–49.
Self-reorganizingDynamicFormationsofMobileAutonomousRobotsforCommunicationNetworkOptimization
53

Dube, R., Rais, C. D., yeh Wang, K., and Tripathi, S. K.
(1997). Signal stability based adaptive routing (ssa)
for ad-hoc mobile networks. IEEE Personal Commu-
nications, 4:36–45.
Gaertner, G. and Nuallain, E. O. (2012). Link Quality Pre-
diction in Mobile Ad-Hoc Networks, pages 61–94. In-
Tech.
Klemm, F., Ye, Z., Krishnamurthy, S. V., and Tripathi, S. K.
(2005). Improving tcp performance in ad hoc net-
works using signal strength based link management.
Ad Hoc Netw., 3(2):175–191.
Nagatani, K., S., K., Okada, Y., Tadokoro, S., Nishimura,
T., Yoshida, T., Koyanagi, E., and Hada, Y. (2011).
Redesign of rescue mobile robot quince. In Safety,
Security, and Rescue Robotics (SSRR), 2011 IEEE In-
ternational Symposium on, pages 13–18.
Necsulescu, P. and K.Schilling (2013). Signal strength
based manet routing protocol: Cost calculation and
performance evaluation. In Proceedings of the
3rd IFAC Symposium on Telematics Applications
(TA2013), Seoul, South Korea.
Qian, K., Song, A., Bao, J., and Zhang, H. (2012). Small
teleoperated robot for nuclear radiation and chemi-
cal leak detection. International Journal of Advanced
Robotic Systems, pages 1–9.
ICINCO2014-DoctoralConsortium
54
