
Visualization of a Virtual Caenorhabditis elegans in WebGL
Andoni Mujika, Gorka Epelde, Alessandro De Mauro and David Oyarzun
Vicomtech-IK4, Mikeletegi Pasealekua,57, 20009, Donostia-San Sebastian, Spain
Keywords:
WebGL, Visualization, Physically-based Modeling, Caenorhabditis elegans.
Abstract:
This paper presents the work that has been done in Si elegans project in order to visualize the locomotion
and the behaviour of a virtual reproduction of the nematode Caenorhabditis elegans, one of the most studied
animal in neuroscience. The project aims to develop the first hardware-based computing framework that will
accurately mimic this worm. It will enable complex and realistic behaviour to emerge through interaction
with a rich and dynamic simulation of a natural or laboratory environment. In order to visualize the physical
behaviours that emerge from the neuronal system that has been constructed in the project, a web environment
has been designed where the user will be able to define an assay and to run it in a WebGL-based 3D virtual
arena. For that a relation has been defined from the physics based simulation (run on the server side) and the
simplified web rendering of it.
1 INTRODUCTION
The Si elegans project aims to emulate the neuronal
system of a nematode called Caenorhabditis elegans
(C. elegans) (Altun and Hall, 2009). The behaviour
that emerges from this emulation will be simulated
in a virtual arena, in three dimensions. C. elegans is
one of the best known organisms in the world and it
is widely used, since its genome is completely known
and its manipulation for chemical and genetic tests
is relatively easy. Moreover, the relative simplicity
of its neuronal system (the hermaphrodite C. elegans
has 302 neurons) and its rich behavioural repertoire
(e.g. locomotion, feeding and even certain social be-
haviours) make this nematode a perfect organism to
study and learn from, in the way to understand more
complex organisms.
Despite the fact that the connectivity of those 302
neurons is known, the knowledge of the scientific
community does not cover every behaviour generated
by the neurons and their effects in the worm. That is
why Si elegans project aims to provide the scientific
community with an emulation alternative to the labo-
ratory experiments for their research, accelerating and
enhancing the research process.
For that, a web-based three-dimensional virtual
arena is being constructed where the user will define
the environment (obstacles, air or liquid, etc.), and the
behavioural experiments that will be emulated (e.g.
touching the worm, placing food or toxic in the plate,
applying vibrations to the whole environment). The
experiment definition will be transferred to a set of
Field Programmable Gate Arrays (FPGAs) where the
neuronal emulation will be held. The neuronal net-
work will process and compute the behaviour of the
worm and a physics engine will calculate the locomo-
tion of the worm based on it. Finally the physics sim-
ulation results will be rendered in the web browser.
Additionally, the web-based user interface will dis-
play detailed results of the experiment at neuron, mus-
cle and the environment level.
This paper describes the work that has been done
in order to connect the web browser and the physics
engine so that the user will be able to define the assay
easily and will visualize it in a 3D environment. In
the following, section 2 reviews the state of art on the
C. elegans locomotion simulation and its visualiza-
tion. Section 3 and section 4 describe the physics en-
gine and the web-based interface and finally, section
5 draws conclusions and discusses the future work.
2 RELATED WORK
Since early nineties, several works that try to simu-
late the locomotion of C. elegans have been presented.
The simulations are becoming more and more realis-
tic, but there is a lot of work to do in order to achieve
a perfect reproduction of the worm.
Most of the works that have been done in this
164
Mujika A., Epelde G., De Mauro A. and Oyarzun D..
Visualization of a Virtual Caenorhabditis elegans in WebGL.
DOI: 10.5220/0005168301640168
In Proceedings of the 2nd International Congress on Neurotechnology, Electronics and Informatics (-2014), pages 164-168
ISBN:
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

field (Suzuki et al., 2005) (Bryden and Cohen, 2008)
(Voegtlin, 2011) follow the pioneering work by
Niebur and Erd
¨
os (Niebur and Erd
¨
os, 1991), regard-
ing the shape of the worm and the forces that are ap-
plied on it to obtain the locomotion. They construct
a 2D reproduction of the nematode with straight seg-
ments that represent the muscles. Different forces are
applied to those muscles to make the body move in a
similar way to the real worm: internal pressure of the
worm, elasticity of the cuticle (”skin” of the worm),
muscle forces and environmental forces.
Regarding 2D simulation of locomotion, Boyle et
al. (Boyle et al., 2012) have been developing one of
the most advanced models, where the behaviour of
the virtual worm is very similar to the real one in
different environments (water, gelatin or agar). In-
deed, they showed that the different locomotion of the
worm does not emerge from the worm, i.e. its muscles
work equally in any environment but the environment
makes C. elegans move in different ways. They also
constructed a neuronal model that makes the worm
adapt to the environment with a minimal sensory in-
put.
In recent years, there have been some efforts to
upgrade previous 2D works to 3D worlds. Their aim
is to offer a perfectly realistic (to go beyond a sim-
ple representation in two dimensions) reproduction
of C. elegans and a easier way to explore its body.
The model presented by Mailler et al. (Mailler et
al., 2010), using a limited neural model and a worm
made by 25 rigid cylindrical sections, obtain a sim-
ilar movement to those obtained by above described
models, but in three dimensions.
The main active project in the field of simulation
of C. elegans is the OpenWorm Project (OpenWorm,
2014). In this case, the physical model is based on
the work of Palyanov et al. (Palyanov et al., 2012),
where the virtual worm is composed of point masses
and springs to model skin and muscles. The neuronal
system of this model uses the 23 neurons that han-
dle forward locomotion (Chalfie et al., 1985). At the
moment, in the OpenWorm project they are integrat-
ing Predictive-Corrective Incompressible Smoothed-
Particle Hydrodynamics (PCI-SPH) (Solenthaler and
Pajarola, 2009) to model the behaviour of all the parti-
cles that take part in the simulation (including fluids).
The realism they want to achieve is very high, but the
performance is too slow for the moment.
In regard to visualization of the results obtained
by the physical engine described above, the Open-
Worm Project has made two different approaches.
First, they developed a WebGL-based browser (Open-
WormBrowser, 2014), where the user can explore a
3D reproduction of C. elegans with all its cells (mus-
cles, neurons and other organs). However, there is
no locomotion in this browser. On the other hand,
they constructed a web version of their physical en-
gine Geppetto (Geppetto, 2014), where the user can
launch some simple particle simulations and watch
some neuronal information.
Our work is similar to the OpenWorm project, but
there are some differences. Firstly, the neuronal sys-
tem of OpenWorm is software-based and in Si ele-
gans, it is implemented using FPGAs. Regarding
physics simulation and its visualization, we aim to
obtain a better balance between realism and perfor-
mance, i.e. we want to obtain a more realistic simu-
lation than other works in the state of the art, without
losing usability because of slowness. On the other
hand, we can say that we are closer to a complete
WebGL-based simulation of the locomotion of C. el-
egans that OpenWorm.
3 PHYSICS SIMULATION AND
WEBGL IMPLEMENTATION
In this section, we describe the physically-based
model that has been defined to make the virtual worm
move forward. Besides, we describe the method
we follow to take this complex simulation to a web
browser.
3.1 Physics Engine
Our physically-based model (Mujika et al., 2014)
makes a simplification in the muscle structure of C.
elegans. Usually, the worm has 95 muscles, divided
in 4 quadrants of 24 muscles, except for the ven-
tral left one which has 23 muscles. However, in
our approach we have considered 96 symmetrically-
distributed muscles, as most works described above
do.
Figure 1: Structure of the virtual C. elegans in the physics
engine.
In our case, biphasic springs are used to model
muscles. A biphasic spring is a regular linear spring
that changes its spring constant at a certain length.
VisualizationofaVirtualCaenorhabditiselegansinWebGL
165

This way, changing the stiffness at a certain point
we stop the elongation of the spring at certain point.
Moreover, in order to generate the locomotion, those
springs must be active, i.e. they must contract and
relax themselves without any external force. That is
why the signal that comes from the neurons (imple-
mented in the FPGAs) is inserted in the equation that
rules the behaviour of the springs.
On the other hand, the rings that compound the
body of the worm are represented with a square of
biphasic springs and are linked to other rings with
the muscles. This springs are stiffer and maintain the
body shape of the animal. Fig. 1 shows the structure
that has been constructed to simulate the worm. In
each quadrant, there are 24 red segments that repre-
sent the muscles and each ring has 4 green segments.
The first and the last ring are smaller in order to obtain
a more similar shape to the shape of the worm.
Once the structure of the worm has been defined
the forces that will be applied to the masses that are
located in the vertices of the structure must be defined.
• As stated before, the elasticity of the cuticle of the
worm and the activation of the muscles is obtained
by the use of biphasic springs.
• Usual gravity is applied to all the masses.
• As gravity would collapse the whole structure, the
internal pressure of the worm must be simulated.
For that, a force field that creates a similar effect
to a cube made of silicon is defined. The body of
the worm is divided into a grid of hexahedra and a
Finite Element Method (FEM) is used to simulate
the opposition to collapsing tendency of the spring
structure.
• Friction is the key that makes the worm go for-
ward and in our model it is based on Signorini’s
law and Coulomb’s friction law. In each time step
the colliding points (including those of the worm
and those from the floor) are computed. Then,
based on the values of forces in the previous time
step, an iterative process is done to obtain the ac-
tual values of the contact forces.
• Collision with obstacles is detected and the resul-
tant forces are applied to the nematode.
All the physics simulation is run using the Simu-
lation Open Framework Architecture (SOFA), (Allard
et al., 2007). It is an Open Source framework primar-
ily targeted at real-time simulation. It offers a scene
graph editor for an easy creation of complex environ-
ments and it has a wide range of components (solvers,
objects, collision detection algorithms, etc.), includ-
ing the possibility to create new ones.
3.2 WebGL Implementation
The simulation of the locomotion of C. elegans is car-
ried out in a server using SOFA, but it must be trans-
ferred to the web browser. Since most users will be
interested in the behaviour of the worm (and not in the
muscles themselves), we use a realistic 3D reproduc-
tion of the nematode (see Fig. 2) that will be trans-
formed accordingly to the simulation in the physics
engine. To render the 3D environment without any
plug-in installation, Three.js library (Three.js, 2014),
that makes use of WebGL (WebGL, 2014), has been
used.
Figure 2: 3D reproduction of C. elegans.
Besides rendering the virtual nematode, its move-
ment must be synchronized with the locomotion of
the worm in the server. For that, animation bones have
been set along the body of the virtual worm. These
bones will be transformed accordingly to the mass
points of the physics model. The triangle mesh that
represents the body is attached to these bones, so the
mesh moves accordingly to the transformations of the
bones. Fig. 3 shows the positions of the 12 animation
bones in respect to the virtual C. elegans.
To synchronize the transformations of the 12 an-
imation bones with the muscle movements generated
in SOFA, our implementation of SOFA generates a
data stream with the positions of the 96 muscles. The
WebGL-based 3D environment takes this data and ap-
plies it to the animation bones. Specifically, the posi-
tion of each bone is set to the center of each second
ring of the worm in SOFA.
Figure 3: Simulation bones of the worm.
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
166
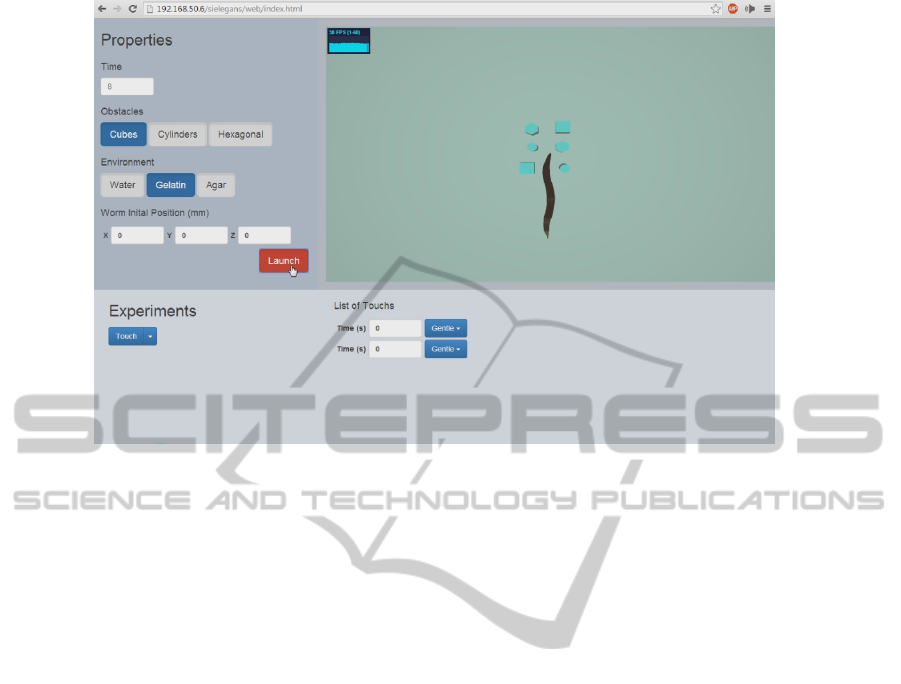
Figure 4: 3D simulation of C. elegans in web.
4 VISUALIZATION
The web browser of Si elegans will have a part where
the user will define all the aspects related to the ex-
periment he wants to carry out. This part will have
three main windows: the environment definition win-
dow, the experiment definition window and the 3D
window.
In the environment definition window the user will
set all the parameters regarding the habitat of the
worm. Some parameters will be discrete (defined with
a dropdown menu) and other continuous (defined with
a numerical value or a slider):
• Shape of the plate (discrete).
• Environmental substance. Discrete (water, air, sil-
icon, etc.) or continuous (density value).
• The initial position of the animal (continuous).
• Friction of the plate. Discrete (different materials)
or continuous (friction value).
There may be some aspects that must be defined
using both the environment definition window and the
3D window. For example, to insert obstacles in the
plate, the user will click in the environment definition
window to choose the obstacle type and then click in
the 3D window to set the place where the obstacle will
be.
On the other hand, the experiment definition win-
dow will be used to define what will happen during
the simulation. Firstly, the user will have to choose an
assay type in a dropdown menu (toxic, feeding, plate
tapping, touch) and then the window will show all the
options related to this experiment. For example, in a
touching experiment, the user will set some touches
with their pressure, their timing and the zone where
they will be done. As in the environment definition
window, some parameters will be set with numerical
values (time), with dropdown menus (different pres-
sure levels) and with the aid of the 3D window (zone).
Finally, in the 3D window, the starting point of
the simulation (obstacles, plate shape, position of the
worm, etc) are rendered using Three.js library. The
user will be able to explore the area with the mouse
and he will also use this window to define some as-
pects of the environment or the experiment, as stated
before.
Fig. 4 shows the first prototype of the web page,
where the user has defined an environment with some
obstacles and the simulation is running.
Once the experiment is completely defined, the
same 3D window will be used to render the move-
ments of C. elegans. As in the experiment definition
tool, the user will be able to explore the area with the
mouse. At the moment, the prototype only renders the
skin of the animal, but in the future, the user will be
able to explore all the cells that compound the body.
In the future, the visualization of the behaviour of
the animal will be customizable. The user may want
to show only some parts of the experiment in the 3D
window, watch it in a slower velocity or stop it, etc.
The user will also see the tracing of the neurons
that he wanted to be traced. This tracing will have
VisualizationofaVirtualCaenorhabditiselegansinWebGL
167

been set in a different user interface. There will be
a list of neurons and their corresponding values in
a timeline (synchronized with the simulation). The
user will be able to remove or add neurons in the list
(among those that have been traced) and change the
tracing mode (voltage values, only spikes, etc.).
5 CONCLUSIONS AND FUTURE
WORK
In this paper we have shown our work to simulate the
locomotion of the worm Caenorhabditis elegans and
render it in a web browser without any plug-in in-
stallation. On the one hand, we created a physically-
based engine that simulates the locomotion of the ne-
matode. The body of the worm is compounded of
biphasic springs and different forces are applied to
them to obtain the locomotion: muscle forces, elas-
ticity, internal pressure and environmental forces.
On the other hand, we developed a web page
where the simulation is shown. The movements of the
muscles are transferred to a realistic 3D reproduction
of the animal using animation bones. The user can set
the parameters of the simulation (environment, posi-
tion of the worm, obstacles, etc.) and will be able
to define the parameters of the experiment (touching
moment, toxins, etc.). Once the simulation is defined,
the web page will run it and will show the information
that the user requires.
Although Si elegans project is advancing fast,
there is still some work to do. Apart from making the
simulation of the locomotion more realistic, regarding
visualization, we identify two main lines of work. On
the one hand, we want to improve the transference of
the information from the physics engine to the web.
This way, we will be able to show all the parts of the
worm (muscles, neurons, organs) in the 3D environ-
ment and offer an innovative way to explore the work-
ing of the organism.
On the other hand, we aim to offer neuroscientists
a useful tool for the study of C. elegans neuronal ac-
tivity. For that, we have to develop a part in the web
page where all the required information will be shown
in a friendly and useful way.
ACKNOWLEDGEMENTS
The Si elegans project is funded by the 7th Frame-
work Programme (FP7) of the European Union un-
der FET Proactive, call ICT-2011.9.11: Neuro-Bio-
Inspired Systems (NBIS).
REFERENCES
Allard, J., Cotin, S., Faure, F., Bensoussan, P.-J., Poyer,
F., Duriez, C., Delingette, H., and L., G. (2007).
Sofa - an open source framework for medical simu-
lation. Medecine Meets Virtual Reality (MMVR15),
pages 1318.
Altun, Z. and Hall, D. (2009). Introduction. wormatlas.
Boyle, J. H., Berri, S., and Cohen, N. (2012). Gait mod-
ulation in c. elegans: An integrated neuromechani-
cal model. Frontiers in Computational Neuroscience,
6(10).
Bryden, A. and Cohen, N. (2008). Neural control of
caenorhabditis elegans forward locomotion: the role
of sensory feedback. Biol. Cybern., 98:339351.
Chalfie, M., Sulston, J., White, J., Southgate, E., J.N., T.,
and Brenner, S. (1985). The neural circuit for touch
sensitivity in caenorhabditis elegans. Journal of Neu-
roscience, 5:956964.
Geppetto (2014). http://live.geppetto.org.
Mailler, R., Avery, J., Graves, J., and N., W. (2010).
A biologically accurate 3d model of the locomotion
of caenorhabditis elegans. In Proceedings of the
2010 International Conference on Biosciences (BIO-
SCIENCESWORLD10), pages 8490.
Mujika, A., de Mauro, A., Robin, G., Epelde, G., and
Oyarzun, G. (2014). A physically-based simulation of
a caenorhabditis elegans. In 22nd International Con-
ference in Central Europe on Computer Graphics, Vi-
sualization and Computer Vision, pages 177184.
Niebur, E. and Erd
¨
os, P. (1991). Theory of the locomotion
of nematodes. Biophysical Journal, 60:11321146.
OpenWorm (2014). http://www.openworm.org/.
OpenWormBrowser (2014). http://browser.openworm.org.
Palyanov, A., Khayrulin, S., Larson, S., and Dibert, A.
(2012). Towards a virtual c. elegans: A framework
for simulation and visualization of the neuromuscular
system in a 3d physical environment. Silico Biology,
11(3):137147.
Solenthaler, B. and Pajarola, R. (2009). Predictivecorrective
incompressible sph. ACM Trans. Graph., 28, 3.
Suzuki, M., Goto, T., Tsuji, T., and Ohtake, H. (2005). A
dynamic body model of the nematode c. elegans with
neural oscillators. Journal of Robotics and Mecha-
tronics, 17(3):318326.
Three.js (2014). http://threejs.org/.
Voegtlin, T. (2011). Clones : a closed-loop simulation
framework for body, muscles and neurons. BMC Neu-
rosci., 12.
WebGL (2014). http://www.khronos.org/webgl/.
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
168
