
Dynamic Task Allocation for Human-robot Teams
Tinka R. A. Giele
1,2
, Tina Mioch
2
, Mark A. Neerincx
2
and John-Jules C. Meyer
1
1
Utrecht University, Drift 10, 3512 BS Utrecht, The Netherlands
2
TNO, Kampweg 5, 3769 DE Soesterberg, The Netherlands
Keywords:
Human-robot Interaction, Agent Cooperation.
Abstract:
Artificial agents, such as robots, are increasingly deployed for teamwork in dynamic, high-demand environ-
ments. This paper presents a framework, which applies context information to establish task (re)allocations
that improve human-robot team’s performance. Based on the framework, a model for adaptive automation
was designed that takes the cognitive task load (CTL) of a human team member and the coordination costs of
switching to a new task allocation into account. Based on these two context factors, it tries to optimize the level
of autonomy of a robot for each task. The model was instantiated for a single human agent cooperating with
a single robot in the urban search and rescue domain. A first experiment provided encouraging results: the
cognitive task load of participants mostly reacted to the model as intended. Recommendations for improving
the model are provided, such as adding more context information.
1 INTRODUCTION
Teams are groups consisting of two or more actors
that set out to achieve a joint goal. A good task al-
location is crucial for team performance, especially
when teams have to cope with high-demand situations
(e.g., at disaster responses). Task allocation should be
flexible: when an environment is dynamic or states
of team members change, reallocating tasks could
be beneficial for team performance (Brannick et al.,
1997). Making a (human) team member responsible
for dynamically allocating tasks, causes extra work-
load (Barnes et al., 2008). To avoid this, tasks should
be reallocated automatically. Such allocation is im-
portant for mixed human-robot teams (Burke et al.,
2004), for example rescue teams including an robot
to explore terrains unsafe for humans. The dynamic
allocation of tasks to human or robot is called adaptive
automation, distinguishing intermediate levels of au-
tonomy for each task in a joint effort to complete the
task. An example is way-point navigation, in which
the operator sets the way-points and the robot drives
along them. Recent research shows that dynamically
adapting autonomy levels of robots could help opti-
mizing team performance, when this process is auto-
mated (Calhoun et al., 2012).
An important challenge in adaptive automation is
deciding when to change the level of autonomy of the
robot, and to which level. This can be done based
on the cognitive task load of the operator (Neerincx,
2003), as cognitive task load has an influence on per-
formance (Neerincx et al., 2009). In addition, cog-
nitive task load itself is influenced by changing lev-
els of automation, as the level of autonomy and op-
erator task load are inversely correlated if other fac-
tors remain stable (Steinfeld et al., 2006). This does
not hold for the relation between autonomy levels and
operator performance. Setting robot autonomy very
high might cause human-out-of-the-loop problems,
whereas setting autonomy very low might cause task
overload for the operator; both decrease performance.
This study, first, aims at the design and formaliza-
tion of a general dynamic task allocation framework
that specifies concepts and their effect on team per-
formance, which can be used to dynamically allocate
tasks. Subsequently, this framework is used to design
a practical model for adaptive automation, based on
cognitive task load. Finally, the model is instantiated
for an experimental setting in the urban search and
rescue domain for a first validation of the model.
2 BACKGROUND
Team Performance. Team performance is a mea-
sure of how well a common goal is achieved. Early
frameworks describing team performance commonly
follow the Input-Process-Output structure. For exam-
117
R. A. Giele T., Mioch T., A. Neerincx M. and C. Meyer J..
Dynamic Task Allocation for Human-robot Teams.
DOI: 10.5220/0005178001170124
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 117-124
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

ple, McGrath (McGrath, 1964) describes three input
concepts: individual level factors (e.g. cognitive abil-
ity), group level factors (e.g. communication) and en-
vironmental factors (e.g. resource availability, task
difficulty). These factors are input for the team’s in-
teraction processes; the output concept is team perfor-
mance. This framework has some downsides. Feed-
back loops are excluded, e.g., team performance it-
self cannot serve as an input for interaction processes.
Also, the Input-Process-Output structure suggests lin-
ear progression, but interactions between various in-
puts and processes or between different processes are
also possible (Ilgen et al., 2005). Outside McGrath’s
framework, a vast amount of research has focused on
the numerous factors that influence individual perfor-
mance (Matthew et al., 2000), for example cognitive
task load (Neerincx, 2003).
Dynamic Task Allocation. Dynamic task allocation
benefits team performance (Brannick et al., 1997), it
can be effectuated in numerous ways. First, responsi-
bility can be distributed, or it can be centralized. Dis-
tributed responsibility for dynamic task allocation has
the disadvantage that it causes extra workload for (hu-
man) team members (Barnes et al., 2008). Disadvan-
tages of centralized coordination are that it might be
unfeasible to implement for very large teams, and that
task reallocations need to be clearly communicated to
the team members. Second, Inagaki (Inagaki, 2003)
argues that a dynamic form of comparison allocation
is the best strategy for task allocation. Comparison
allocation means tasks are allocated based on capa-
bilities of actors.
Adaptive Automation. Traditionally, tasks in mixed
human-robot teams are allocated either fully to a hu-
man or fully to a robot, e.g. based on a list of static
human versus robot capabilities (Fitts et al., 1951).
This way of allocating tasks has the problem that it
is overly coarse. In addition, static task allocation
is insufficient for dynamic environments, as capabil-
ities needed for a task could change (Inagaki, 2003).
Adaptive task allocation addresses these issues.
Numerous studies have shown the positive effects
of dynamic task allocation via adaptive automation in
single human-single robot teams, e.g., improved per-
formance, enhanced situation awareness and reduced
cognitive workload (Greef et al., 2010), (Bailey et al.,
2006), (Calhoun et al., 2012). A few studies have
looked at adaptive automation in the context of sin-
gle human-multiple robot teams (Parasuraman et al.,
2009), (Kidwell et al., 2012). In these studies how-
ever, only the level of autonomy of a single robot or
of a separate system on a single task was adapted.
Different techniques for triggering reallocation are
possible, for example techniques based on perfor-
mance (Calhoun et al., 2012), psycho-physiological
measures (Bailey et al., 2006), operator cogni-
tion (Hilburn et al., 1993), environment (Moray et al.,
2000) or hybrid techniques (Greef et al., 2010). How-
ever, not all tasks allow for real-time performance
measurement, psycho-physiological measures are not
suitable for all settings, and environment-based tech-
niques in isolation fail to capture changing states of
team members. Hybrid techniques are more robust
as multiple factors can be used (Greef et al., 2010).
Only a limited amount of studies have used hybrid
techniques (Greef et al., 2010).
Cognitive Task Load. An important factor
for dynamic task allocation in teams, operating
in high-demand situations, is cognitive task load
(CTL) (Guzzo et al., 1995). A model of CTL was
proposed by Neerincx (Neerincx, 2003). The model
describes how task characteristics are of influence on
individual performance and mental effort. CTL can
be described as a function over three metrics. The
time occupied is the amount of time a person spends
performing a task, the number of task-set switches is
the number of times that a person has to switch be-
tween different tasks. The level of information pro-
cessing is the type of cognitive processes required by
recent tasks. When the values for the three metrics fall
into a certain range (corresponding to a certain region
in CTL-space), the operator is diagnosed to be in a
certain mental state, i.e., vigilance, underload, over-
load, and cognitive lock-up. Being in such a state
has a negative influence on performance. The CTL
model has been experimentally validated in the naval
domain (Neerincx et al., 2009).
3 DYNAMIC TASK ALLOCATION
FRAMEWORK
Dynamic task allocation can be seen as optimizing
a utility (evaluation) function. Firstly, possible role
assignments are generated from context information.
Role assignments are a combination of a robot and
a set of tasks this robot could execute. These role
assignments are then evaluated using context infor-
mation relevant to how well the robot is able to exe-
cute the set of tasks. Secondly, an optimization algo-
rithm is applied, which finds the collection of options
which has the highest utility and allocates every task
to a robot. This collection of options is a task alloca-
tion (Gerkey and Matari
´
c, 2004).
This approach has some limitations. The utility
of a robot-task pair is assumed not to be influenced
by other tasks the robot might be doing. Also, this
analysis does not include mixed human-robot teams.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
118

More importantly, multi-robot task allocation prob-
lems are reduced to optimization problems, but some
important steps that are needed to realize this reduc-
tion are underspecified: generating the feasible role
assignments and how to evaluate these. Our frame-
work builds on Gerkey and Matari
´
c’s analysis, and
improves it on these aspects. We specifically address
the issues of option generation and utility calculation.
Once we have dealt with these issues, we reduce the
task allocation problem to the set-partitioning prob-
lem (SPP). Although the SPP is strongly NP-hard, it
has been studied extensively and many heuristic algo-
rithms that give good approximations have been de-
veloped (Gerkey and Matari
´
c, 2004).
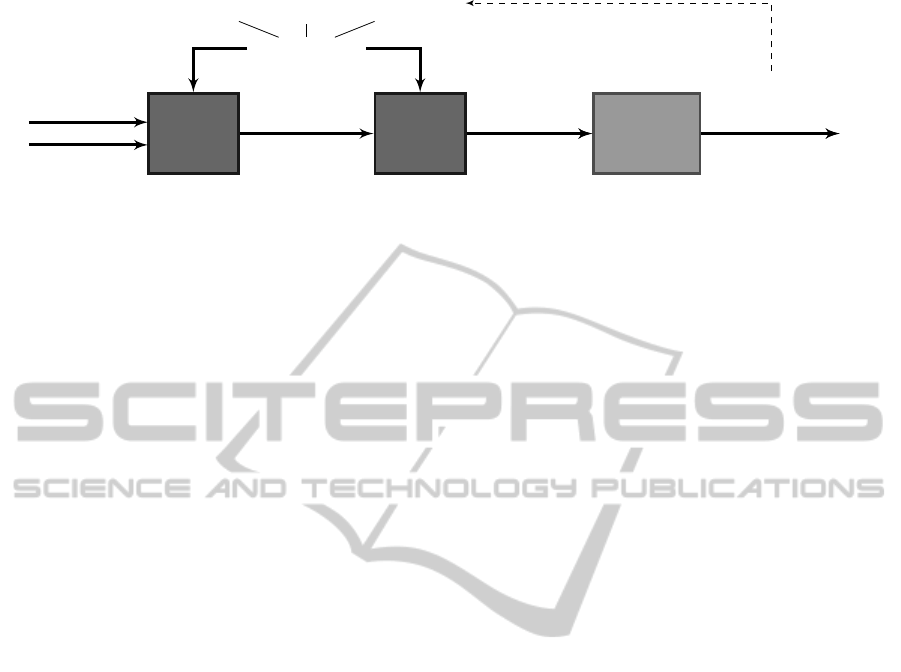
An overview of the proposed framework is shown
in Figure 1. Three categories of factors that influence
task allocation (individual, environmental, and task
factors) are represented by the three input concepts
in the top of the figure.
Task models represents task factors: S
T
(T,t)
where S
T
is a name of a property or state, T is a task
and t is a time point. Task models contains functions
from a specific task to its properties (static) and states
(dynamic) at a certain point in time. Examples in-
clude location and resource requirement.
Environment models represent environmental fac-
tors: S
E
(E,t) where E is an environment. Environ-
ment models are functions that describe states and
properties of the environment that are dependent on
the location and possibly the time (e.g. resource avail-
ability and weather conditions).
Actor models represent individual factors. Actor
models are functions that describe for each actor their
relevant abilities and states, associated with a certain
point in time: S
A
(A,t) where A is an actor. Abili-
ties are static, for example IQ, personality traits and
skills. The dynamic counterpart of actor abilities are
actor states, for example emotion, location and fa-
tigue. An important influence on task allocation is the
cost caused by the reallocation of tasks (Barnes et al.,
2008); for that reason, our framework includes a feed-
back loop for the task allocation itself (denoted by the
dashed arrow). The current task allocation itself thus
is an actor state.
Some factors influencing task allocation can only
be described by combining factors from the categories
mentioned above. These factors are represented by
the concept of situation models in our framework:
S
I
(hA,T i,t) where T is a set of tasks. Situation
model functions are always described using functions
from actor models, environment models and/or task
factors. An example is the distance between an ac-
tor and a task, a function that is described using both
actor location and task location.
To come to an optimal task allocation, three pro-
cesses are identified, namely option generation and
pruning, utility calculation, and determining the opti-
mal task allocation (see colored boxes in Figure 1).
The first process is option generation and pruning.
An option is a actor-task set combination, O = hA,T i.
Options are generated from the set of actors (input)
and the set of tasks (input). Then, restrictive factors
are used to prune the set of possibilities. For example,
an actor might lack the proper sensors to execute a
task.
The second process is utility calculation. For this
process, preference factors are used. Preference fac-
tors give an indication of how well the task set can be
executed by the actor. For example, if an actor has
been assigned a single, but difficult task, he might do
better on this task than if he has also been assigned to
do several other tasks. All actor-task set combina-
tions are mapped to a utility value using some func-
tion that combines the outcomes of all the preference
factors.
The final process is determining the optimal task
allocation. With the utility function and the set of
possible actor-task set pairs, we can use a SPP solving
algorithm (Gerkey and Matari
´
c, 2004) to arrive at the
best task allocation for a specific time.
Solving the task allocation problem by using the
SPP introduces the assumption that all tasks need
to be allocated to an actor. This excludes scenarios
where it might not be possible or preferable to allo-
cate all tasks. We relieve this assumption by intro-
ducing a placeholder for tasks that are not executed,
a dummy actor. Tasks allocated to the dummy ac-
tor are not executed. We can now model mandatory
tasks by defining a restrictive factor that prunes role
assignments that assign the dummy actor to manda-
tory tasks. Also, the costs of not executing certain
tasks can be easily modeled using a preference factor,
since the set of tasks that are not executed is the set of
tasks assigned to the dummy actor.
4 MODEL FOR ADAPTIVE
AUTOMATION
In adaptive automation, tasks are dynamically allo-
cated at a specific level of autonomy. Based on the
framework, we build the model by defining the factors
to be included as influence on adaptive automation.
As argued in Section 2, cognitive task load is a good
candidate as it affects performance and is influenced
by the tasks an actor has. Specifically, it is likely to be
influenced by at which level of autonomy an allocated
task is. We will include the predicted cognitive task
DynamicTaskAllocationforHuman-robotTeams
119
Situation models
Option
generation
and pruning
Utility
calculation
Determining
optimal task
allocation
Task
models
Environment
models
Actor
models
Restrictive
factors
Preference
factors
*Options are combinations of an actor and a set of tasks (allocated to that actor), i.e. a role assignment.
Set of actors
Set of tasks
Set of options*
Set of options*
with utility
Optimal
task allocation
Figure 1: Overview of the proposed framework. Boxes denote processes, arrows represent flow of information. Opposite to
Gerkey and Matari
´
c’s (Gerkey and Matari
´
c, 2004) focus, we focus on the process of pruning generated options and calculating
utility of options (darker boxes) and less on the process of optimization (lighter box).
load of an actor on a set of tasks as a preference fac-
tor in our model. Cognitive task load encompasses the
metric task switching. We define this metric to only
cover task switches that are not caused by task reallo-
cations, but only by an actor switching between tasks
he is both assigned to (for example switching between
driving and looking around while exploring an area).
We define costs that are caused by task reallocations
as coordination costs and include this as a separate
preference factor. Team performance could benefit
from an actor switching between different (levels of
autonomy of) tasks if it reduces the negative effect on
performance of the cognitive state he is in, but only
if the coordination costs do not outweigh the cost of
the negative effect on performance of the cognitive
state (Inagaki, 2003).
Levels of Autonomy. Tasks that have multiple possi-
ble levels of automation are replaced in the task model
by a separate version of the task for each different
level of autonomy, T becomes {T
1
,T
2
,..., T
k
}. Tasks
at intermediate levels of autonomy (for example way-
point driving) are divided into two subtasks, one for
an operator (setting way-points) and one for a robot
(driving along the way-points). The separate versions
all need to be described in terms of task state con-
cepts. The same task at several different levels of
autonomy can be modeled as several mutually exclu-
sive subtasks. All but one of the mutually exclusive
tasks (which could consist of two subtasks) should be
forcibly allocated to the dummy actor, ensuring a task
is only allocated at a single level of autonomy to a real
actor.
Cognitive Task Load. We use the predicted CTL
level of an actor on a task set to help decide how well
this task set is suited to be executed by the actor (rel-
ative to other tasks sets). All three metrics of CTL are
situation state concepts, they are some function over
an option (actor-task set), using the properties of the
tasks in the task set. Using the three metrics, we can
estimate whether the CTL level of an actor will be in a
problem region given a set of tasks. Task allocations
that keep actors out of CTL problem regions should
be preferred. Timing is also an important aspect in
CTL. The longer a person’s CTL is in a problem re-
gion, the more negative the effect on performance will
be. Typically, vigilance and underload problems oc-
cur only after some time (900 seconds), while over-
load and cognitive lock-up problems can occur even
if the CTL has only been in the problem region for a
short time (300 seconds) (Neerincx, 2003). Cognitive
task load as proposed by Neerincx only makes sense
in the context of humans, not for robots. For example,
robots cannot suffer from vigilance problems if they
are bored, because generally robots cannot be bored.
The formal description of the preference concept
CTL can be seen in Equation 1. Preference based on
CTL ranges from 1 (most preferred) to 0 (least pre-
ferred). The ’isHuman’ function describes whether
an actor is a human, the ’cognitiveState’ functions
describe whether an actor is in a certain cognitive
state and the ’cognitiveStatePast’ functions describe
for how long (seconds) an actor has been in a certain
cognitive state.
The first line of the equation describes that prefer-
ence of a actor-task set pair based on CTL is 1 if the
actor is not human or the actor’s CTL is not is a prob-
lem region. The second to fifth line describe the pref-
erence to be in between 0.7/0.5 and 0.2/0, depending
on how long an actor has been in the corresponding
problem region (preference decreasing faster for over-
load and cognitive lock-up as they can occur faster
than other problem states). As cognitive lockup is
slightly less problematic than the other states the per-
son can be in, the preference associated therewith is
set somewhat higher.
Coordination Costs. The coordination costs have
to take into account two aspects of switching between
tasks, namely how much attention is needed to switch
to a new task set, and how often task reallocations
take place. The first aspect covers how much atten-
tion is needed to switch to a new task set. The formal
description of this aspect is seen in Equation 2. If the
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
120

ctl
I
(hA,T i,t) =
1 if ¬isHuman
A
(A,t) or neutral
I
(hA,T i,t)
0.7 − 0.5 ∗ (min(300, cognitiveLockUpPast
A
(A,t))/300) if cognitiveLockUp
I
(hA,T i,t)
0.5 − 0.5 ∗ (min(300, overloadPast
A
(A,t))/300) if overload
I
(hA,T i,t)
0.5 − 0.5 ∗ (min(900, vigilancePast
A
(A,t))/900) if vigilance
I
(hA,T i,t)
0.5 − 0.5 ∗ (min(900, underloadPast
A
(A,t))/900) otherwise (if underload
I
(hA,T i,t))
Eq. 1: Formal description of the preference concept CTL. The function min(x,y) returns the lesser of its two arguments. All
parameters used here and in other formulas are based on relevant literature and were tweaked using data from pilot studies.
task set of an actor does not change, there are no co-
ordination costs, which is preferable (fourth line of
Eq. 2). If a task gets assigned to an actor that was not
previously assigned to this actor at all, this has a rel-
atively high cost (first line). If a task gets assigned to
an actor that was previously assigned to this actor, but
at a different level of autonomy, there are two scenar-
ios. The level of autonomy of a robot could increase,
in this case the coordination costs for the human actor
are small (third line). If the level of autonomy of a
robot decreases, the cost is a bit higher as the human
actor has increased responsibilities (second line).
The second aspect that coordination costs have
to take into account is how often task reallocations
take place. Changing the level of autonomy too of-
ten could cause extra workload (Inagaki, 2003). The
formal description of this aspect is seen in Equation
3. The first line describes that there is no effect if
the last task reallocation is more than 300 seconds
ago or if the task was already assigned to the actor at
the same autonomy level. The second line describes
that a task reallocation in the last 300 seconds gives a
penalty to the preference (the longer ago, the smaller
the penalty).
The full preference function for coordination costs
is seen in Equation 4. It defines preference based on
coordination costs of a actor-task set pair to be the
average preference based on coordination costs for all
separate tasks in the task set.
Utility Function. The utility function maps role
assignments at a certain point in time to their utility.
The utility of a role assignment is some combination
of all preference concepts, in this case the preference
based on CTL and the preference based on coordina-
tion costs (CC). Team performance benefits from an
actor switching between different (levels of autonomy
of) tasks if the the negative effect on performance
of the cognitive state he is in outweighs the costs of
switching. The utility of a role assignment thus is
the preference of the role assignment based on CTL
minus the coordination costs. The preference concept
CC is high if the coordination costs are low (because
this is preferred) and vice versa. Therefore the
utility of a role assignment is the addition of the two
preference concepts CTL and CC. We define that the
lowest utility equals 0 and the highest utility equals 1.
To fit this range, we scale the sum of the preference
concepts CTL and CC (which also both range from 0
to 1) by dividing it by two. More formally, the utility
of a role assignment (an option) O = hA,T i at time t
is: utility(O,t) = (ctl
I
(O,t) + cc
I
(O,t))/2
5 EXPERIMENT
An experiment was set-up to test if the model reallo-
cates tasks at the right moment and if it chooses the
appropriate reallocations. We instantiated the model
to be used for a single operator-single robot team in
the urban search and rescue domain. This involved
specifying tasks, possible levels of autonomy of these
tasks and task properties. Furthermore, we used an
existing model that calculates CTL specifically for the
urban search and rescue domain (Colin et al., 2014).
Experimental Method. Twelve participants (aged
21 to 38) completed three fifteen minute sessions and
one participant performed a single session. Partici-
pants were given the role of robot operator and asked
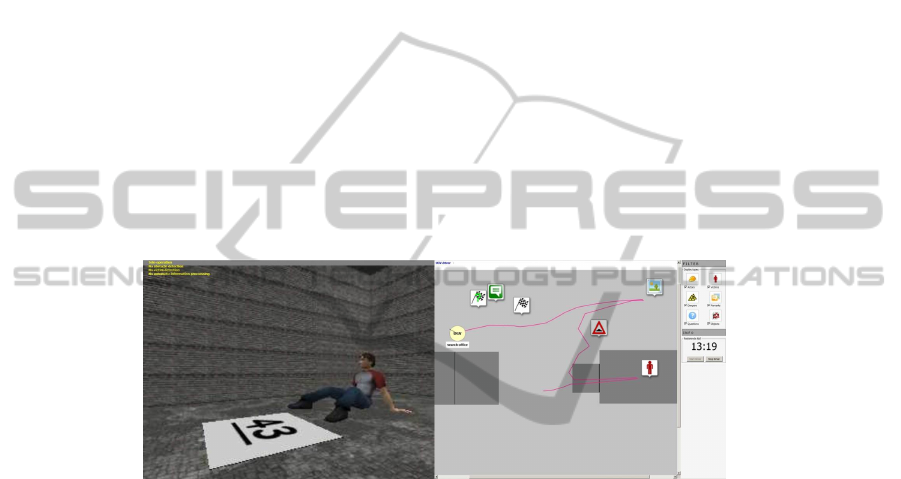
to execute a typical urban search and rescue task. The
task was to explore a virtual office building with a
virtual robot after an earthquake, and to map the situ-
ation in the building. This was done by navigating the
robot through the building and adding findings (large
obstacles and victims) to a tactical map, a screen shot
of the interface is seen in Figure 2. Sometimes infor-
mation appeared on the map (e.g., “We think there are
two people in this room.”). As there might be victims
in the building in need of medical attention, partici-
pants were told to hurry. The tasks were allocated to
the participants by the task allocation model: the op-
timal level of autonomy for the robot, as calculated
by the model, was chosen. Four tasks were specified:
navigation, obstacle recognition & avoidance, victim
recognition and information processing. The level of
autonomy of the robot could change separately for
each of these four tasks. During task execution, the
CTL of the participant was calculated. When the CTL
was in a problem region, the task allocation model
was run. If the task allocation model determined that
a task reallocation was needed, this new task alloca-
tion was communicated to the robot and its operator.
Results. In the experiment, we evaluated whether
DynamicTaskAllocationforHuman-robotTeams
121
cc
attention
(hA,T
v
i,t) =
0 if ¬∃w : T
w
∈ currentTasks
A
(A,t)
0.2 if ∃w : T
w
∈ currentTasks
A
(A,t) ∧ v < w
0.5 if ∃w : T
w
∈ currentTasks
A
(A,t) ∧ v > w
1 otherwise (if ∃w : T
w
∈ currentTasks
A
(A,t) ∧ v = w )
Eq. 2: The function describing preference based on how much attention is needed for switching between tasks. The ’current-
Tasks’ function describes the set of tasks currently allocated to an actor.
cc
time
(hA,T
v
i,t) =
cc
attention
(hA,T
v
i,t) if reallocation(hA,T
v
i,t) ≥ 300 or cc
attention
(hA,T
v
i,t) = 1
max(0,cc
attention
(hA,T
v
i,t) − penalty) otherwise
where penalty = ((300 − reallocation(hA, T
v
i,t))/300) ∗ 0.25
Eq. 3: The preference function also taking into account how often task reallocations take place. The ’reallocation’ function
describes how long ago the last reallocation of a task was (in seconds).
cc
I
(hA,T i,t) =
∑
∀T
v
∈T
cc
time
(hA,T
v
i,t)
!
/|T | if isHuman
A
(A,t)
1 otherwise (A is a robotic or dummy actor)
Eq. 4: The full preference function describing preference based on the cost of switching between tasks.
Figure 2: A screen shot of the practice level. The left screen shows the building through the camera mounted on the robot. A
victim can be seen, accompanied by a number that could be used to look up information about the victim. The right screen
shows the tactical map. The circle on the left corresponds to the location of the robot, the trail to the driven route. Other items
shown on the map are (from left to right) a point of interest, a remark, a waypoint, an obstacle, a victim and a picture.
the participants thought that the task reallocations of
the model were done at the right time, whether the
task reallocations were thought to be appropriate, and
whether, after a task reallocation, the CTL of the par-
ticipants changed as predicted by the model.
Six statements about timing of reallocations were
given to participants after the experiment. Cronbach’s
alpha was used to check the internal consistency of
these six statements, which yielded 0,607. This is
quite low, but expected as the concept of timing is
rather broad and we use only six statements. The
average response over all six statements describes if
participants think the model reallocated tasks at the
right moment ranging from 1 (strongly disagree) to 5
(strongly agree). The average value over all partici-
pants is 2,65 (standard deviation 0,68). Participants
are thus quite neutral about the timing of the model.
We cannot say, based on this data, that the model re-
allocates tasks at the right moment. Conversely, we
also cannot say the timing of the model was fully off.
Five statements about the appropriateness of re-
allocations were given to participants after the exper-
iment. Cronbach’s alpha yielded 0,694. The aver-
age response over the five statements describes if par-
ticipants think the model chose appropriate task re-
allocations, ranging from 1 (strongly disagree) to 5
(strongly agree). Averaged out over all participants,
this value is 2,10 (standard deviation 0,39). Partic-
ipants are thus quite negative about the appropriate-
ness of the reallocations. We cannot say, based on
this data, that the model chooses appropriate reallo-
cations. Conversely, we can say participants think the
model does not choose appropriate reallocations.
The real shift in CTL was compared to the pre-
dicted shift in CTL for each task reallocation. This
comparison was done separately for the three metrics.
We checked whether the difference between the pre-
dicted CTL for the old and new task allocation is the
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
122

same as the difference between the average real CTL
in the two minutes before and after the reallocation.
This difference is calculated by subtracting the value
for the new task allocation from the value for the old
one. The correlation coefficients are 0,32 (p < 0, 05)
for LIP, 0,43 (p < 0,01) for TO, and 0,29 (p = 0,06)
for TSS. The correlations for LIP and TO are signifi-
cant (p < 0,05), the correlation for TSS is not. Based
on this data, we can validate that the LIP and TO re-
spond to the task reallocations as the model predicts.
6 DISCUSSION
Trust in Model. During the experiment, partici-
pants found it hard to trust the model and to have no
control over the task allocation. Making work agree-
ments could help improve trust as they give an op-
erator room to restrict which tasks can be done by
the robot(s) and when. Work agreements can also
give insight into what tasks actors can expect to be
reallocated and when reallocations occur. To further
give actors insight and even some influence, we could
adapt the level of automation of the task reallocation
model itself. A hybrid approach might be most suit-
able. The model could decide for high workloads
and suggest for low workloads (operator decides).
Furthermore, it benefits trust if the actor has insight
into how the model chooses a task reallocation, e.g.,
through showing how options are rated. It needs to be
further specified and evaluated how the internal pro-
cesses of the model can be made visually available to
the user to improve his understanding and trust of the
model. In addition, future research on work agree-
ments and hybrid models is needed to investigate how
trust affects the effectiveness of the model.
Factors in Choosing a Task Allocation. CTL
is a very important factor in choosing a task alloca-
tion, but two possible additional factors were identi-
fied during the experiment. The first factor is the ca-
pability of an actor to do a task. A second factor is
the preference for particular tasks of the actor. Tak-
ing this into account could greatly benefit actor trust
towards the model and reduce reluctance to accept its
decisions. Also, the actor is probably more likely to
execute a task well that he likes. Future research is
needed to explore the effects of including additional
factors such as capability and preference, both on the
trust and on the performance of the tasks.
Configuration. The exact moment of a task allo-
cation relies on the configuration of the CTL model.
Participants’ opinion about the timing of the task al-
location model will likely benefit from personaliz-
ing configuration of CTL problem region boundaries,
which was not done in the current experiment. Fu-
ture research should be executed to determine these
boundaries and to explore the effects of personal con-
figuration. Configuration poses additional challenges:
Results of experiments using task allocation models
with different configurations are hard to generalize
and configuration takes a lot of time and effort. Ide-
ally, models will need to become self-learning, adapt-
ing themselves to novel tasks and actors when needed.
Representation and Notification. This study did
not address how to communicate this task allocation
to the actors using the model. More research is needed
to investigate how to keep all actors aware of which
tasks are allocated to themand how to do this in the
most intuitive and understandable way.
7 CONCLUSION
A high-level framework for dynamic task alloca-
tion, aimed at improving team performance in mixed
human-robot teams, was presented. The framework
describes important concepts that influence team per-
formance and can be used to dynamically allocate
tasks. The framework applies to a wide array of prob-
lems, including heterogeneous teams that might in-
clude multiple human actors and multiple robots or
agents, a variety of tasks that might change over time
and complex and dynamic environments.
We used the framework as a basis for designing
a model for adaptive automation triggered by cogni-
tive task load. The framework was general and flex-
ible enough to cover all aspects needed to formalize
the model, mainly cognitive task load (as a preference
factor) and adaptive automation (as dynamic task allo-
cation). We noticed that although cognitive task load
is an important factor, some other factors are also im-
portant, such as capability, preference and trust or per-
ceived capability. As the adaptive automation model
is based on the framework, it can be quite easily ex-
tended to include other factors, which will be done in
future work. The model addresses a wider range of
problems than most current adaptive automation re-
search, as it focuses on multiple tasks each with their
own variable level of autonomy.
We designed an experiment using the model, to
explore the effects of the resulting adaptive automa-
tion. The model was instantiated for a single hu-
man agent cooperating with a single robot in the ur-
ban search and rescue domain. An experiment was
conducted aimed at testing the model. The experi-
ment did not result in conclusive evidence that the
model worked as it should, but encouraging results
were found. Two of the three cognitive task load met-
DynamicTaskAllocationforHuman-robotTeams
123

rics (both the level of information processing and the
time occupied) of participants could be managed us-
ing the model. Furthermore, important focus points
for improving the model and furthering research on
adaptive automation in general were identified.
ACKNOWLEDGEMENTS
This research is supported by the EU-FP7 ICT Pro-
grammes project 247870 (NIFTi) and project 609763
(TRADR).
REFERENCES
Bailey, N. R., Scerbo, M. W., Freeman, F. G., Mikulka,
P. J., and Scott, L. A. (2006). Comparison of a brain-
based adaptive system and a manual adaptable system
for invoking automation. Human Factors: The Jour-
nal of the Human Factors and Ergonomics Society,
48(4):693–709.
Barnes, C. M., Hollenbeck, J. R., Wagner, D. T., DeRue,
D. S., Nahrgang, J. D., and Schwind, K. M. (2008).
Harmful help: The costs of backing-up behavior in
teams. Journal of Applied Psychology, 93(3):529.
Brannick, M. T., Salas, E., and Prince, C. (1997). Team
Performance Assessment and Measurement: Theory,
Methods, and Applications. Series in Applied Psy-
chology. Lawrence Erlbaum Associates.
Burke, J. L., Murphy, R. R., Rogers, E., Lumelsky, V. J., and
Scholtz, J. (2004). Final report for the DARPA/NSF
interdisciplinary study on human-robot interaction.
Systems, Man, and Cybernetics, Part C: Applications
and Reviews, IEEE Transactions on, 34(2):103–112.
Calhoun, G. L., Ruff, H. A., Spriggs, S., and Murray, C.
(2012). Tailored performance-based adaptive levels
of automation. Proceedings of the Human Factors and
Ergonomics Society, 56(1):413–417.
Colin, T., Mioch, T., Smets, N., and Neerincx, M. (2014).
Real time modeling of the cognitive load of an urban
search and rescue robot operator. In The 23rd IEEE
International Symposium on Robot and Human Inter-
active Communication (RO-MAN2014).
Fitts, P. M., Viteles, M. S., Barr, N. L., Brimhall, D. R.,
Finch, G., Gardner, E., Grether, W. F., Kellum,
W. E., and Stevens, S. S. (1951). Human engineering
for an effective air-navigation and traffic-control sys-
tem. Technical report, Ohio State University Research
Foundation Columbus.
Gerkey, B. P. and Matari
´
c, M. J. (2004). A formal analysis
and taxonomy of task allocation in multi-robot sys-
tems. The International Journal of Robotics Research,
23(9):939–954.
Greef, T. E. d., Arciszewski, H. F. R., and Neerincx, M. A.
(2010). Adaptive automation based on an object-
oriented task model: Implementation and evaluation
in a realistic C2 environment. Journal of Cognitive
Engineering and Decision Making, 4(2):152–182.
Guzzo, R. A., Salas, E., and Goldstein, I. L. (1995). Team
Effectiveness and Decision Making in Organizations.
Jossey-Bass San Francisco.
Hilburn, B., Molloy, R., Wong, D., and Parasuraman, R.
(1993). Operator versus computer control of adaptive
automation. In The Adaptive Function Allocation for
Intelligent Cockpits (AFAIC) Program: Interim Re-
search Guidelines for the Application of Adaptive Au-
tomation, pages 31–36. DTIC Document.
Ilgen, D. R., Hollenbeck, J. R., Johnson, M., and Jundt, D.
(2005). Teams in organizations: From input-process-
output models to IMOI models. Annual Review of
Psychology, 56:517–543.
Inagaki, T. (2003). Adaptive automation: Sharing and trad-
ing of control. In Handbook of Cognitive Task Design,
pages 147–169. Mahwah, NJ: Lawrence Erlbaum As-
sociates.
Kidwell, B., Calhoun, G. L., Ruff, H. A., and Parasuraman,
R. (2012). Adaptable and adaptive automation for su-
pervisory control of multiple autonomous vehicles. In
Proceedings of the Human Factors and Ergonomics
Society, pages 428–432.
Matthew, G., Davies, D. R., Westerman, S. J., and Stam-
mers, R. B. (2000). Human Performance: Cognition,
Stress, and Individual Differences. Psychology Press.
McGrath, J. E. (1964). Social Psychology: A Brief Intro-
duction. Holt, Rinehart and Winston.
Moray, N., Inagaki, T., and Itoh, M. (2000). Adaptive au-
tomation, trust, and self-confidence in fault manage-
ment of time-critical tasks. Journal of Experimental
Psychology: Applied, 6(1):44.
Neerincx, M. A. (2003). Cognitive task load design: Model,
methods and examples. In Handbook of Cognitive
Task Design, pages 283–305. Mahwah, NJ: Lawrence
Erlbaum Associates.
Neerincx, M. A., Kennedie, S., Grootjen, M., and Grootjen,
F. (2009). Modeling the cognitive task load and per-
formance of naval operators. In Schmorrow, D., Es-
tabrooke, I., and Grootjen, M., editors, Foundations of
Augmented Cognition, volume 5638 of LNCS, pages
260–269. Springer Berlin / Heidelberg.
Parasuraman, R., Cosenzo, K. A., and Visser, E. d. (2009).
Adaptive automation for human supervision of multi-
ple uninhabited vehicles: Effects on change detection,
situation awareness, and mental workload. Military
Psychology, 21(2):270–297.
Steinfeld, A., Fong, T., Kaber, D., Lewis, M., Scholtz, J.,
Schultz, A., and Goodrich, M. (2006). Common met-
rics for human-robot interaction. In Proceedings of the
1
st
Conference on Human-Robot Interaction, pages
33–40. ACM.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
124
