
Increased Fall Detection Accuracy in an Accelerometer-based Algorithm
Considering Residual Movement
Panagiotis Kostopoulos
1
, Tiago Nunes
1
, Kevin Salvi
1
, Michel Deriaz
1
and Julien Torrent
2
1
Institute of Services Science, University of Geneva, Geneva, Switzerland
2
Fondation Suisse pour les T´el´eth`eses, Neuchˆatel, Switzerland
Keywords:
Fall Detection, Smartwatch, Sensors, Residual Movement, Accelerometer, Alarm.
Abstract:
Every year over 11 million falls are registered. Falls play a critical role in the deterioration of the health of the
elderly and the subsequent need of care. This paper presents a fall detection system running on a smartwatch
(F2D). Data from the accelerometer is collected, passing through an adaptive threshold-based algorithm which
detects patterns corresponding to a fall. A decision module takes into account the residual movement of
the user, matching a detected fall pattern to an actual fall. Unlike traditional systems which require a base
station and an alarm central, F2D works completely independently. To the best of our knowledge, this is the
first fall detection system which works on a smartwatch, being less stigmatizing for the end user. The fall
detection algorithm has been tested by Fondation Suisse pour les T´el´eth`eses (FST), the project partner for the
commercialization of our system. Taking advantage of their experience with the end users, we are confident
that F2D meets the demands of a reliable and easily extensible system. This paper highlights the innovative
algorithm which takes into account residual movement to increase the fall detection accuracy and summarizes
the architecture and the implementation of the fall detection system.
1 INTRODUCTION
Unintentional falls are frequent and quite dangerous
for elderly people. Yearly, more than 11 million falls
are registered (Brown, 2005), leading to a wide spec-
trum of injuries for this age group. Aside from caus-
ing physical injuries, falls can also have dramatic psy-
chological consequences that reduce elderly people’s
independence (Ryynanen et al., 1992). It has been
found that after falling, 48% of older people report
a fear of falling and 25% report curtailing activities.
Moreover, falls can also lead to disability and de-
creased mobility which often results in increased de-
pendency on others and, hence, an increased need of
being admitted to an institution. Finally, one other se-
rious consequence of falling is the ”long-lie” condi-
tion where a falling person remains on the ground or
floor for more than an hour after a fall. The ”long-lie”
is a sign of weakness, illness and social isolation and
is associated with high mortality rates among the el-
derly. Time spent on the floor can be associated with
a fear of falling, muscle damage, pneumonia, pres-
sure sores, dehydration and hypothermia (Lord et al.,
2001; Nevit et al., 1989).
In an attempt to minimize these serious conse-
quences of falling, various fall detection systems
were developed over the last decade. These systems
are mainly based on video-cameras (Nait-Charif and
McKenna, 2004; Lee and Lee, 2009; Huang et al.,
2008), acoustic (Alwan et al., 2006; Litvak et al.,
2008) or inertial sensors (Hwang et al., 2004) and
mobile phone technology (Sposaro and Tyson, 2009;
Dai et al., 2010; Dumitrache and Pasca, 2013; Aguiar
et al., 2014).
Common fall detection systems are based on
a sensor detecting a strong vertical acceleration,
launching an alarm when a fall event is recognized.
More recent systems usually take into account other
sensors able to detect the device’s orientation in or-
der to determine whether the user is lying or standing.
In (Dai et al., 2010) the authors present PerFallD, a
system which combines the detection and the com-
munication components using mobile phones. They
compare it with existing academic and commercial
solutions and conclude that their system is quite ac-
curate despite the fact that they are using only low-
cost sensors (the ones from an Android G1 phone). In
(Sposaro and Tyson, 2009) the authors present iFall,
another Android application tested on a G1 phone,
which is focused on the communication between the
30
Kostopoulos P., Nunes T., Salvi K., Deriaz M. and Torrent J..
Increased Fall Detection Accuracy in an Accelerometer-based Algorithm Considering Residual Movement.
DOI: 10.5220/0005179100300036
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 30-36
ISBN: 978-989-758-077-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

fall detection system and the alarm notification mod-
ule, instead of the sensors only.
Most of the current fall detection systems require
a base central. In this paper we propose a fall de-
tection system (F2D) which works on a smartwatch,
therefore completely independent from a base station.
Using such a device is less stigmatizing for the user.
In addition, it can be offered for less than half of the
cost of existing systems on the market. Our system
meets the requirements of reliability, ease of installa-
tion and restriction of false positives (Doughty et al.,
2000) which are essential for a properly built fall de-
tection system.
F2D works on a smartwatch and therefore fixed
on the wrist of the person. We have avoided the dis-
advantages of (He et al., 2012) where the solution of
the waist-mounted smartphone the authors provide is
not feasible for two reasons: 1) Normally people do
not wear their phones on the waist but in their pockets.
2) The system will be working only when the smart-
phone is mounted on the waist and not at other times.
Other problems such as the usage of intrusive devices
exist in (Hou et al., 2012) and (Li et al., 2012), where
the accelerometer and Bluetooth unit are bounded as
a wearable unit and placed on the subject’s waist or
chest.
Nowadays, simple smartwatches are very power-
ful and have a set of sensors that can be used and
diverted from their original intent. More computing
power and storage on these devices offer greater op-
portunities. Using a single smartwatch as a device for
running the F2D application satisfies the condition of
ease of installation of the fall detection system.
In general the fall detection algorithms wait for
a response of the user after a possible fall in order
to make a decision if the situation is critical or not.
But this is not always applicable and convenient for
the end user, especially for elderly people who are the
target group of our research. In F2D we propose an
accelerometer-based algorithm considering the resid-
ual movement after the fall. This analysis is per-
formed in the decision module of the F2D application
which is responsible for the classification of a possi-
ble fall pattern being a real fall event or not.
The rest of this paper is organized as follows. In
Section 2 our designed fall detection system is de-
scribed in detail emphasizing the innovative fall de-
tection algorithm. Experimental results are reported
and discussed in Section 3. Future improvements of
our work to make F2D more robust are presented in
Section 4. Finally, a brief conclusion is given in Sec-
tion 5.
2 SYSTEM DESIGN
Our fall detection system is an Android application
running on an AW-420.RX smartwatch of Simvalley
Mobile. We have chosen the Android based solution
because it is an open source framework designed for
mobile devices. The Android SDK provides the API
libraries and developer tools necessary to build, test
and debug applications for Android. We implemented
the prototype in Java using the Android SDK API 19.
The fall detection algorithm, which is explained be-
low, is implemented as a background service. When a
fall is detected the service informs the main applica-
tion, which notifies the caretakers (family or friends).
There are several notification channels the user can
choose from: call, SMS or email.
2.1 System Overview
We collect data from the accelerometer sensor of the
smartwatch. Then we apply filters to detect patterns
corresponding to a fall. We use a threshold based
algorithm for the fall detection which takes into ac-
count the residual movement of the user after the fall.
The thresholds were selected based on experiments
with different profiles of users (age, weight, height
are factors that were taken into account). The deci-
sion module combines different data coming from the
filters as depicted in Figure 1, in order to make a deci-
sion whether a possible fall corresponds to a real fall.
If it is the case, the information is transmitted to the
alarm module. When a potentially critical situation is
detected, the smartwatch uses different communica-
tion means (call, SMS, email) to inform the caretak-
ers. Another important difference with the traditional
systems is that the smartwatch communicates directly
with the caretakers with no involvement of a base sta-
tion and a centralized alarm.
Figure 1: System architecture.
2.2 Fall Detection Algorithm
The fall detection algorithm is implemented in a back-
ground service and is running continuously. The user
can operate his smartwatch as usual. F2D does not
cause any interference with the normal usage of in-
stalled applications. The algorithm is threshold based
like (Dumitrache and Pasca, 2013), relying on the
captured data of the accelerometer of the smartwatch.
IncreasedFallDetectionAccuracyinanAccelerometer-basedAlgorithmConsideringResidualMovement
31

We decided to use a threshold based algorithm and
not a machine learning approach like (Aguiar et al.,
2014) as it is less complex and therefore requires the
lowest computational power (Habib et al., 2014). In
the typical scenario, the user will use the application
on his smartwatch normally during the day without
the requirement of charging it much more than usu-
ally. Since the fall detection system will run continu-
ously, we should optimize the battery consumption of
the device. Therefore, only the tri-axial accelerometer
signal is used since it is the most informative sensor
regarding the fall detection.
The algorithm distinguishes daily activities from
falls. Activities of Daily Living (ADL) are normal
activities such as walking, standing or running. The
pattern of a fall must be different from the patterns
of these activities. Acceleration data is sampled at 40
Hz from the 3-axis accelerometer sensor embedded
in the Android smartwatch. Specifically, the sensor
which provides acceleration information without the
gravity component (linear acceleration) is used. We
calculate the norm of the acceleration for each mo-
ment as described in Equation 1.
acceleration =
p
x
2
+ y
2
+ z
2
(1)
We have analyzed a set of data with 150 different
simulated falls from different people involved in the
experiments, as reported in Table 2, from our project
partner FST. This company has a long experience
in creating and using innovative products adapted to
people with disabilities. Thanks to this data we have
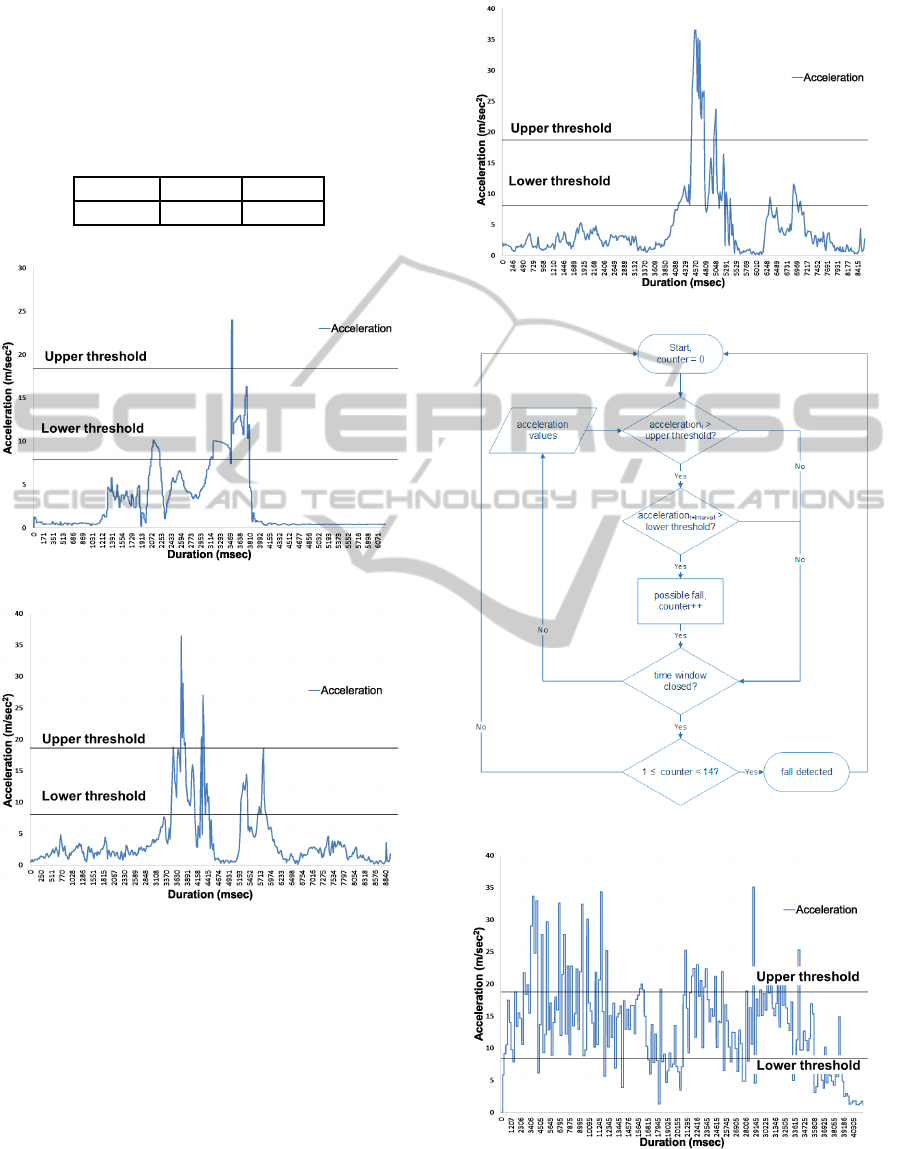
improved the detection of possible falls. We observed
that all falls follow one of the three patterns which we
have called smooth, strong and sharp. They are given
in Figures 2, 3 and 4 respectively. The main differ-
ence between them is the time interval of the residual
movement after the fall Table 1. More specifically,
when a fall takes place, the peak that exceeds the up-
per threshold of the acceleration corresponds to the
hit. After this, the pattern of the fall has a second
peak, lower than the first one and exceeding the lower
threshold. Finally, the acceleration returns to normal
values. This behaviour of the acceleration after the
first peak represents the residual movement that we
take into account in the decision module for the char-
acterization of a possible fall event as a real fall.
2.2.1 Time Window
The time window is an essential part of the fall de-
tection algorithm. We have defined a time window in
which we are able to recognize a fall pattern. This
window is set to 6 seconds, a value which has been
selected after conducting experiments, using the set
of data from simulated falls mentioned above. The
main goal of the algorithm is the detection of all falls
and at the same time the elimination of false positives.
Building and testing our system we concluded that
less than 6 seconds is not enough for the detection of
all different types of falls. However, setting the win-
dow to higher values creates a bigger occurrence of
false positives.
2.2.2 Fall Pattern
The next step of the algorithm is the detection of a
possible fall. In order to consider an activity as a pos-
sible fall the two following conditions must be satis-
fied: 1) If the acceleration exceeds an upper thresh-
old which is set to 18 m/sec
2
. 2) If after a given
time interval the acceleration exceeds a lower thresh-
old which is set to 7 m/sec
2
. The two thresholds have
been selected based on the basic trade-off between de-
tecting all falls and avoiding false positives. This time
difference between the two peaks represents the resid-
ual movement of the user after a fall. The intensity of
this movement depends on the profile of the individ-
ual user. The three possible values of the time interval
are given in Table 1.
If the two conditions are satisfied during the time
window of 6 seconds then a possible fall is suspected.
We can see in Figures 2 - 4 that this time window
is sufficient for the satisfaction of the two conditions
that should happen in order to detect a fall pattern.
2.2.3 Decision Module
The final step of the fall detection algorithm is the
classification of the fall pattern as real. In this deci-
sion module a counter increases every time that both
conditions of exceeding the thresholds are satisfied.
The critical range of the values of the fall counter
is (1 ≤ counter < 14). If (counter ≥ 14), then it is
due to another activity being performed (e.g., run-
ning) which gives the difference in the acceleration
values as we can see in Figure 6. On the other hand if
(counter < 1) it means the user at most did a sudden
movement with his wrist and so the threshold condi-
tions were not satisfied (e.g., when a user was going
down the stairs in Figure 8). The graphical explana-
tion and the structure of the fall detection algorithm is
given in Figure 5.
2.3 Emergency Actions
If the algorithm decides that a fall has happened then
the background service notifies the main application,
which in turn sends a message to the caretakers.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
32
The smartwatch communicates directly with the
caretakers. In case of an alarm the loudspeaker of
the watch is automatically turned on at a high volume
and calls from caretakers are automatically answered.
This allows the user to communicate even in uncom-
fortable positions that could result after a fall.
Table 1: The three possible time intervals.
Smooth Strong Sharp
100 ms 300 ms 500 ms
Figure 2: Smooth fall.
Figure 3: Strong fall.
3 EVALUATION
For the evaluation of the reliability of the fall detec-
tion mechanism in F2D we performed a series of ex-
periments. We collected different types of falls’ data
(i.e., forwards, backwards, sideways). We also col-
lected activities of daily living data (e.g., walking, go-
ing down the stairs, going up the stairs) as we can
see in Figures 7 - 9. Since it is very difficult to test
a fall detection mechanism with elderly people, as it
can more easily cause injuries, we performed the ex-
Figure 4: Sharp fall.
Figure 5: Fall detection algorithm.
Figure 6: Running activity.
periments with healthy adults. The test subjects were
wearing smartwatches while falling on a mattress.
IncreasedFallDetectionAccuracyinanAccelerometer-basedAlgorithmConsideringResidualMovement
33
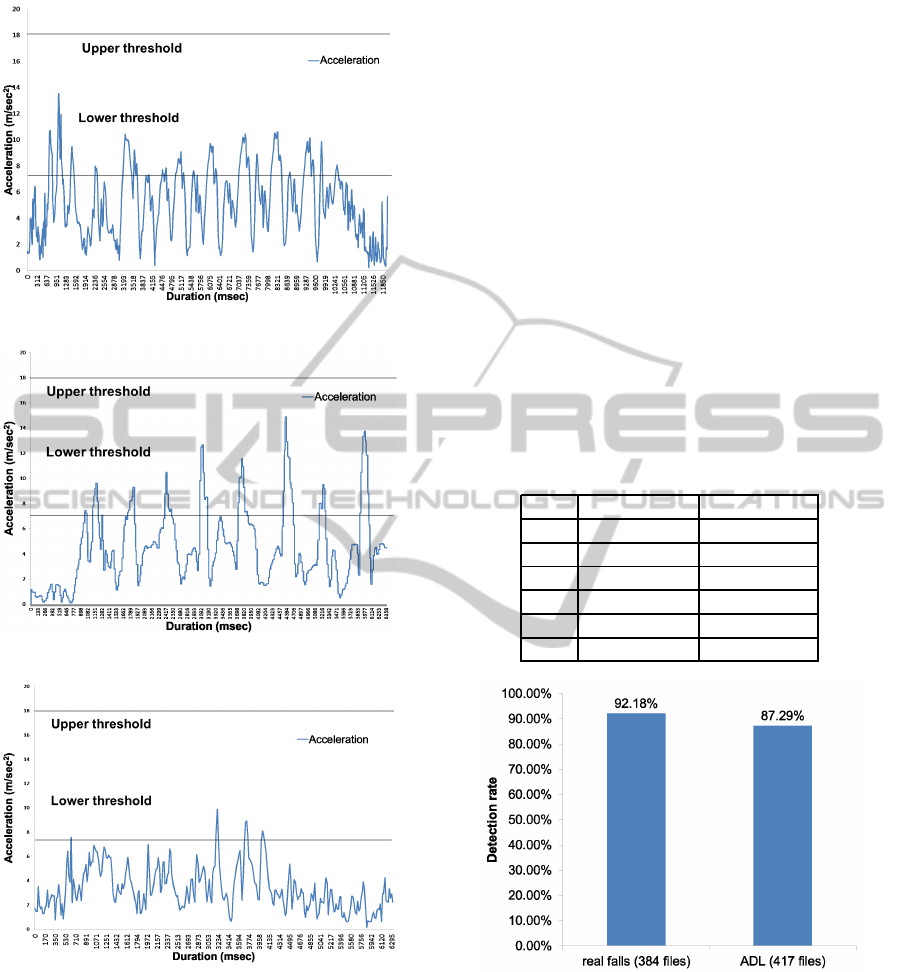
Figure 7: Walking activity.
Figure 8: Going down the stairs.
Figure 9: Going up the stairs.
For testing the ADL the test subjects wore the
smartwatches for 24 hours. Testers were doing all
their daily life activities. As we can see in the Fig-
ures 7 - 9 the acceleration values do not exceed the
upper threshold. Hence, a suspected fall is not classi-
fied as a real fall because the counter must exceed 0
in order to detect a real fall.
Moreover, we evaluated our fall detection algo-
rithm using a set of simulated falls and another set
with ADL data, that we received from our project
partner FST. This set consists of a subset of 384 sim-
ulated falls and 417 ADL. The set of data that we
are using is much larger comparing with other sys-
tems (Dumitrache and Pasca, 2013) where only 34
simulated falls and 200 daily activities simulated by
a single young person were used. Our data has been
collected from 6 people with different profiles as re-
ported in Table 2. The simulated falls took place in a
room falling on a mattress in order to avoid injuries.
Also the ADL were the following: walking, going up
the stairs, going down the stairs, stand up from a chair,
sit down on a chair, running. Based on these facts,
it can be noted that the accuracy of our algorithm is
quite high. We achieved a true positive rate (sensi-
tivity) of 92.18% for the set of simulated falls and a
true negativerate (specificity) of 87.29% for detecting
the ADL data. The average of sensitivity and speci-
ficity represents the accuracy of the system which is
equal to 89.74%. The analytical results are presented
in Figures 10 and 11.
Table 2: Different profiles.
Age Height (cm) Weight (kg)
22 185 76
26 176 69
27 182 63
29 184 53
30 186 93
40 177 75
Figure 10: Accuracy using real data from partner.
We conclude that the F2D system works reliably.
Some false alarms were detected when the testers per-
formed sudden movements with residual activity try-
ing to simulate the same pattern of a fall event.
4 FUTURE WORK
The first step for further improvement of the robust-
ness of our fall detection system is the reduction of
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
34
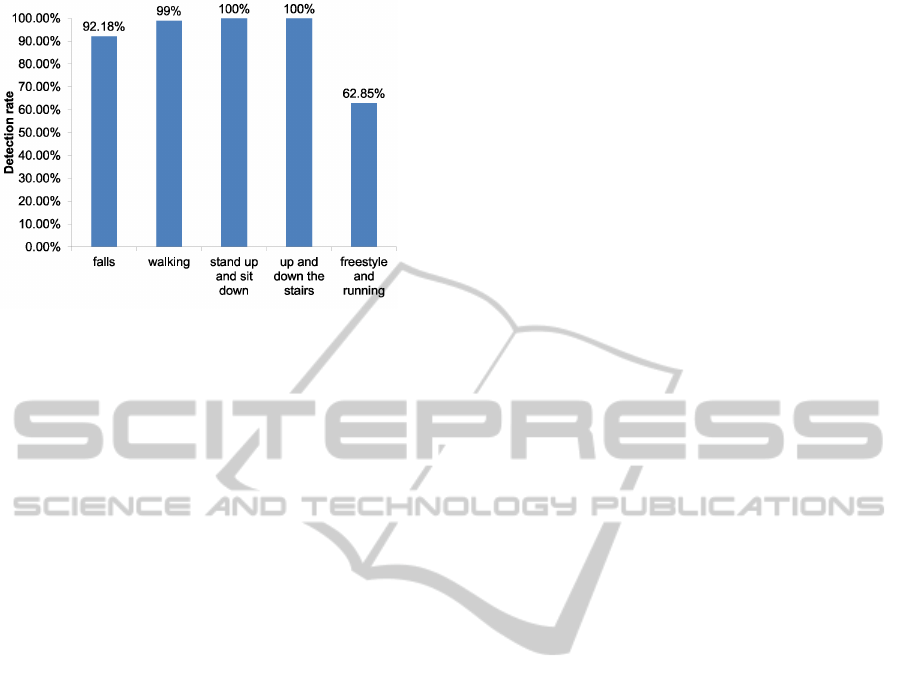
Figure 11: Decomposition of ADL and respective detection
rate.
false positives. We are planning to achieve this goal
in three steps. The first step is the elimination of mis-
leading direction of the movement of the smartwatch.
We cannot expect to detect a fall when the direction
of smartwatch is going up. Thanks to this recognition
of the movement direction we will avoid some false
positivescoming from sudden movementswhich have
similar patterns with a fall but in which the direction
of the movement is going up.
The second step for reducing false positives is the
use of adaptive thresholds. With the selected thresh-
olds we cover most of the cases of a fall based on the
experiments carried out in our lab and the data that
we received from the end users of our project partner.
With the adaptivity of the upper and lower thresholds
we will make our fall detection system more generic
and therefore allow a tailored response for each spe-
cific end user. We expect further improvements to the
fall detection as well as a reduction of the false posi-
tives.
The third and last step in decreasing false positives
is taking into account the users’ context. Common
fall detection systems are based on a sensor detect-
ing a strong vertical acceleration. But smoother falls
(e.g., a person grabbing a chair, a table, or any other
object) are not detected while some particular situa-
tions (a user that sits abruptly on his sofa) lead to false
alarms. To distinguish only the critical situations, we
will take into account contextual data. For example,
what happened before the fall, after the fall, at which
place in the room, at what time of the day, or next to
what object in a room. A user’s profile, continuously
updated with his habits or particular behaviour, will
bring additional data to the user’s context. The cur-
rent context (e.g., position, time) will be used in two
different manners. The first is to define the variables
of the filters in order to better differentiate the pos-
sible (expected) patterns. For example, we can take
into account the users’ height and weight as parame-
ters for the algorithm. The second manner is to help
the decision module. Once a possible fall is detected
by the algorithm, we will check if it is likely that it is
a real fall according to the current context.
Finally, thanks to the experience of our project
partner with elderly end users, we will be able to test
our fall detection system with real-world fall data in
the future. Testing our algorithm in real-life condi-
tions will give us the opportunity to create a more ro-
bust automated alarm system with higher acceptance.
5 CONCLUSION
Fall detection is a research field that has a big impact
on the improvementof the daily life of elderly people.
In this paper we propose the first fall detection system
designed to run on an independent smartwatch (F2D).
There is no base station (which limits the range), no
central alarm station (which is more difficult to man-
age) and it works on a standard smartwatch. It implies
that it is less stigmatizing for the end user, quite cheap
comparing to existing systems and it is easily extend-
able. F2D uses an innovative fall detection algorithm
which takes into account the residual movementof the
user in order to match a fall pattern to a real fall.
We have conducted a range of experiments in our
lab and used real data from our project partner FST
who has relevant experience in the domain involving
real end users. These experiments demonstrated that
the fall detection system is robust.
Based on the reliability of the fall detection and
the restriction of false positives, which are guaran-
teed by the fall detection algorithm, we have built a
system which meets the requirements for deployment
and use.
ACKNOWLEDGEMENTS
This work was supported by the Swiss Commission
for Technology and Innovation (CTI grant 15876.2
PFES-ES). The authors would like to thank Anastasija
Collen who helped to improve the quality of this pa-
per.
REFERENCES
Aguiar, B., Rocha, T., Silva, J., and Sousa, I.
(2014). Accelerometer-based fall detection for smart-
phones. In Medical Measurements and Applications
(MeMeA), 2014 IEEE International Symposium on.
IncreasedFallDetectionAccuracyinanAccelerometer-basedAlgorithmConsideringResidualMovement
35

Alwan, M., Rajendran, P., Kell, S., Mack, D., and Dalal, S.
(2006). A smart and passive floor-vibration based fall
detector for elderly. In Proc. ICTTA’ 06.
Brown, G. (2005). An accelerometer based fall detec-
tor: Development, experimentation, and analysis. In
EECS/SUPERB.
Dai, J., Bai, X., Yang, Z., Shen, Z., and Xuan, D. (2010).
Perfalld: A pervasive fall detection system using mo-
bile phones. In Pervasive Computing and Communi-
cations Workshops (PERCOM Workshops), 2010 8th
IEEE International Conference on.
Doughty, K., Lewis, R., and McIntosh, A. (2000). The
desigh of a practical and reliable fall detector for
community and institutional telecare. In Journal of
Telemedicine and Telecare.
Dumitrache, M. and Pasca, S. (2013). Fall detection al-
gorithm based on triaxial accelerometer data. In E-
Health and Bioengineering Conference (EHB), 2013.
Habib, M. A., Mohktar, M. S., Kamaruzzaman, S. B.,
Lim, K. S., Pin, T. M., and Ibrahim, F. (2014).
Smartphone-based solutions for fall detection and
prevention: challenges and open issues. In
http://www.mdpi.com/journal/sensors.
He, Y., Li, Y., and Bao, S.-D. (2012). Fall detection by
built-in tri-accelerometer of smartphone. In Biomedi-
cal and Health Informatics (BHI), 2012 IEEE-EMBS
International Conference on.
Hou, Y., Li, N., and Huang, Z. (2012). Triaxial
accelerometer-based real time fall event detection. In
Information Society (i-Society), 2012 International
Conference on.
Huang, B., Tian, G., and Li, X. (2008). A method for fast
fall detection. In Proc 7th World Congr Intell Contr
Autom.
Hwang, J., Kang, J., Jang, Y., and Kim, H. (2004). Devel-
opment of novel algorithm and real-time monitoring
ambulatory system using bluetooth module for fall de-
tection in the elderly. In Proc 26th IEEE EMBS Ann
Int Conf.
Lee, Y. and Lee, H. (2009). Multiple object tracking for
fall detection in real-time surveillance system. In Proc
11th Int Conf Adv Commn Tec.
Li, Y., Chen, G., Shen, Y., Zhu, Y., and Cheng, Z. (2012).
Accelerometer-based fall detection sensor system for
the elderly. In Cloud Computing and Intelligent Sys-
tems (CCIS), 2012 IEEE 2nd International Confer-
ence on.
Litvak, D., Zigel, Y., and Gannot, I. (2008). Fall detection
of elderly through floor vibrations and sound. In Proc
30th IEEE EMBS Ann Int Conf.
Lord, R., Sherrington, C., and Menz, H. (2001). Falls in
older people: risk factors and strategies for prevention.
In Cambridge University Press. Cambridge.
Nait-Charif, H. and McKenna, S. (2004). Activity summari-
sation and fall detection in a supportive home environ-
ment. In Proc 17th Inte Conf Patt Recog. Cambridge
UK.
Nevit, M., Cummings, S., Kidd, S., and Black, D. (1989).
Risk factors for recurrent nonsyncopal fall. a prospec-
tive study. In J Am Med Ass.
Ryynanen, O. P., Kivela, S. L., Honkanen, R., and Laippala,
P. (1992). Falls and lying helpless in the elderly. In Z
Gerontol.
Sposaro, F. and Tyson, G. (2009). ifall: An android applica-
tion for fall monitoring and response. In Engineering
in Medicine and Biology Society, 2009. EMBC 2009.
Annual International Conference of the IEEE.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
36
