
Automatic Tooth Identification in Dental Panoramic Images with
Atlas-based Models
Selma Guzel
1
, Ayse Betul Oktay
2
and Kadir Tufan
3
1
Department of Computer Engineering, Gebze Institute of Technology, 41400, Kocaeli, Turkey
2
Department of Computer Engineering, Istanbul Medeniyet University, 34700, Istanbul, Turkey
3
Department of Computer Engineering, Fatih University, 34500, Istanbul, Turkey
Keywords:
Tooth detection, Tooth labeling, Haar, SVM, Atlas-based Model.
Abstract:
After catastrophes and mass disasters, accurate and efficient identification of decedents requires an automatic
system which depends upon strong biometrics. In this paper, we present an automatic tooth detection and
labeling system based on panoramic dental radiographs. Although our ultimate objective is to identify dece-
dents by comparing the postmortem and antemortem dental radiographs, this paper only involves the tooth
detection and the tooth labeling stages. In the system, the tooth regions are first determined and the detection
module runs for each region individually. By employing the sliding window technique, the Haar features are
extracted from each window and the SVM classifies the windows as tooth or not. The labeling module labels
the candidate tooth positions determined by the SVM with an atlas-based model and the final tooth positions
are inferred. The novelty of our system is combining the atlas-based model with the SVM under the same
framework. We tested our system on 35 panoramic images and the results are promising.
1 INTRODUCTION
Decedent identification after catastrophes is very cru-
cial for many reasons including relieving the family’s
distress, issuing a death certificate for legacy, and in-
surance. Using dental panoramic radiographs (See
Figure 1(a)) for decedent identification satisfies the
limitations of the other biometrics, such as DNA and
fingerprint, due to the durable structure of teeth (Sen,
2010). However, if identification is performed manu-
ally, it takes a long time. Moreover, if some change-
able characteristics are utilized, the accuracy rate may
decrease (Zhou and Abdel-Mottaleb, 2005). There-
fore, an automatic dental identification system is very
important for fast and reliable decedent identification.
There exist many studies in the literature (Lin and
Lai, 2009; Mahoor and Abdel-Mottaleb, 2005; Push-
paraj et al., 2013) for identification based on dental ra-
diographs. The Automated Dental Identification Sys-
tem in (Abdel-Mottaleb et al., 2003) isolates the teeth
using the integral intensity projection method and it
is accepted as the pioneer in terms of the tooth isola-
tion approach. In (Zhou and Abdel-Mottaleb, 2005),
the snake method is employed to isolate the teeth in
advance of using the integral intensity projection to
determine the initial contours. These two studies are
tested on bitewing images. In (Jain et al., 2003), the
same method in (Zhou and Abdel-Mottaleb, 2005) is
used for tooth isolation before applying the Bayesian
rule to determine the tooth contours. It is tested on
both bitewing and panoramic images; but, the system
is semi-automatic. The system in (Jain et al., 2003)
eliminates the inaccurate segmentation lines using the
dental pulp which is also utilized in (Frejlichowski
and Wanat, 2011) instead of the gaps between the
teeth for separating the adjacent teeth. In (Lin et al.,
2010), the SVM classifier runs with several geometri-
cal tooth features to classify a tooth. The tooth identi-
fication is completed after labeling the teeth according
to a particular pattern. The system is tested only on
bitewing images. In (Jain and Chen, 2005), the fusion
of three SVM classifiers are used for tooth classifica-
tion and the Markov chain model is used for labeling.
The system is tested on a few panoramic dental radio-
graphs.
In this paper, we propose a novel tooth identifi-
cation system based on machine learning and atlas-
based models (Guzel, 2014). We combine the ap-
pearance information of teeth in panoramic images
with the geometrical information under the atlas-
based model. The appearance of teeth are extracted
with Haar descriptors (Viola and Jones, 2001) and
136
Guzel S., Betul Oktay A. and Tufan K..
Automatic Tooth Identification in Dental Panoramic Images with Atlas-based Models.
DOI: 10.5220/0005179701360141
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 136-141
ISBN: 978-989-758-077-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
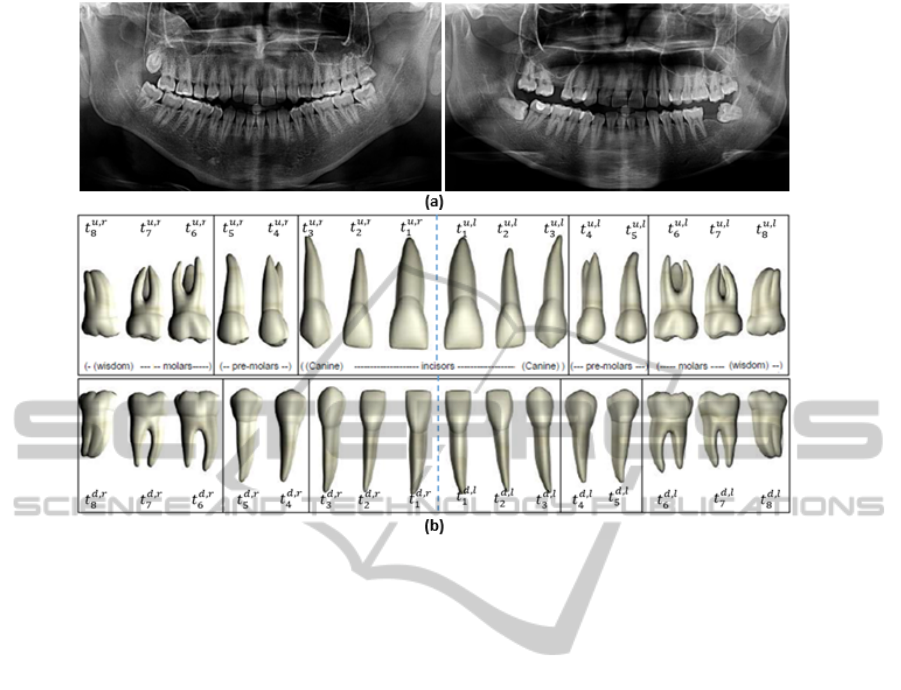
Figure 1: (a) Examples of dental panoramic radiographs, (b) layout of the teeth where t
j,s
i
represents the i
th
tooth on the jaw
j ∈ {up, down} and the side s ∈ {right, le ft}.
the Candidate Tooth Positions (CTP) are found by the
SVM. The final tooth labels are determined accord-
ing to the CTP and their spatial relationship using an
atlas-based framework.
Our method has several advantages. First, the can-
didate teeth are detected with the textural descriptors
without requiring a template for each tooth. The can-
didate teeth determined according to the local appear-
ance are incorporated efficiently with the atlas-based
models which are constructed considering the geo-
metric information about the teeth. In addition, our
system may work on intra-oral X-ray images with
small modifications.
The organization of this paper is as follows: The
framework of the proposed system is introduced in
Section 2. Section 3 presents the detection module
and Section 4 presents the labelling module. In Sec-
tion 5, the experimental results are evaluated and Sec-
tion 6 concludes the paper.
2 THE FRAMEWORK OF THE
PROPOSED SYSTEM
Our system consists of two modules which are candi-
date tooth detection module and the labeling module
(Figure 2). In the candidate tooth detection module,
the SVM detects the CTP based on the Haar features.
Then, in the labeling module, the optimal tooth po-
sitions are identified using the atlas-based modeling
approach.
3 TOOTH DETECTION MODULE
Each tooth has unique shape and appearance charac-
teristics. Most of the studies in the literature (Jain
et al., 2003; Abdel-Mottaleb et al., 2003; Zhou and
Abdel-Mottaleb, 2005) directly use the intensity val-
ues via histogram projection in order to detect the
teeth. However, in panoramic images the gap between
the teeth disappears and occlusions may occur be-
cause of stitching partial X-ray images taken from the
circular shaped jaw onto a 2-D image (Frejlichowski
and Wanat, 2011). Therefore, instead of detecting
the teeth with intensity change information, we pro-
pose using the textural and intensity descriptors to-
gether without requiring a model for each tooth. Note
that, the intensity based techniques (Abdel-Mottaleb
et al., 2003; Zhou and Abdel-Mottaleb, 2005) use lo-
cal image intensity information between the neighbor-
ing teeth, while our technique uses non-local informa-
tion including the intensity and texture of the teeth.
The Haar descriptors are used for feature extrac-
AutomaticToothIdentificationinDentalPanoramicImageswithAtlas-basedModels
137
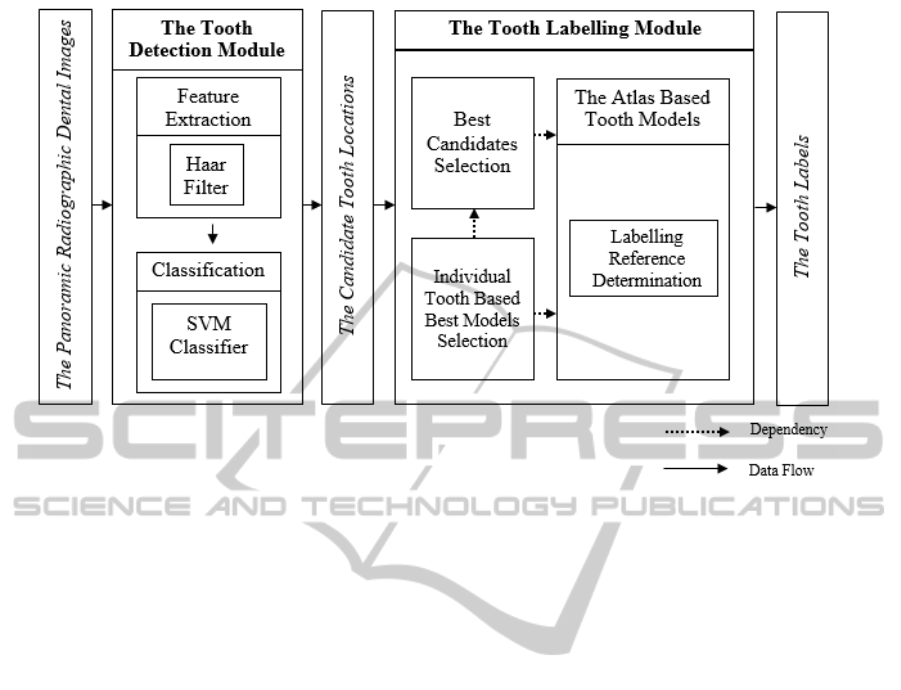
Figure 2: The proposed tooth identification system.
tion. The Haar features are similar to Haar basis func-
tions (Papageorgiou et al., 1998) and they extract the
intensity and texture features effectively.
There are 32 teeth in a normal adult mouth where
8 of them are incisors, 4 of them are canines, 8
of them are premolars, and 12 of them are molars.
Let t = {t
j,s
1
, t
j,s
2
, ..., t
j,s
8
} be the tooth labels on a jaw
where j ∈ {up, down} is the upper or lower jaw and
s ∈ {le ft, right} is the side of the mouth. We divide
the teeth on one side of the jaw into 3 different subsets
where t
m
= {t
j,s
1
, t
j,s
2
, t
j,s
3
} are the molar teeth on side
s of jaw j, t
pm
= {t
j,s
4
, t
j,s
5
} are the premolar teeth on
side s of jaw j, and t
i
= {t
j,s
6
, t
j,s
7
, t
j,s
8
} are the incisors
and canine teeth on side s of jaw j (Figure 1b).
Each tooth subset {t
j,s
m
, t
j,s
pm
, t
j,s
i
} on a jaw j is
trained and tested separately with the SVM. For train-
ing, we use the manually delineated tooth images for
positive samples and non-tooth regions around the
tooth locations as negative samples. In testing, we
use a sliding window approach. For a pair {v, y}, let v
be the feature vector and y = {0, 1} be the class where
y = 0 is the non-tooth and y = 1 is the tooth class. The
windows classified as tooth (y = 1) , are called as the
CTP and they are used in the tooth labeling module.
4 LABELING MODULE
In order to infer the final positions and labels of
teeth, we use an atlas based model. Let A
k
=
{a
j,s
1
, a
j,s
2
, ..., a
j,s
8
} be an atlas (Figure 3) where each
node a
i
in the atlas represents a tooth t
j,s
i
. We con-
sider the center of the mouth gap as the initial refer-
ence point for labeling to construct the model. Be-
cause, while taking the panoramic X-ray image, the
movement of the patient is prevented by the the den-
tal panoramic system positioning technology which
involves bite fork, forehead support, and chin rest. As
a result, corrupting the teeth order is prohibited. We
use the integral intensity projection method (Zhou and
Abdel-Mottaleb, 2005) to find the center of the mouth
gap.
Consider A = {A
1
, A
2
, ..., A
n
} as the atlas set
learned from the training set. According to the CTP,
our objective is to infer the optimal atlas A
∗
∈ A that
best matches with the geometrical information rep-
resented by the CTP. In order to find A
∗
, we first
eliminate the inappropriate CTP according to the cor-
responding search space in the atlas based models.
After that, the appropriate candidates are labeled for
each tooth model. Let the cost g
c
(l
k
, a
k
) represent the
distance of the candidate tooth position l
k
to the cor-
responding tooth center a
k
. The candidate l
k
which
is the closest one to the center a
k
of the correspond-
ing tooth in the model, namely whose g
c
(l
k
, a
k
) is the
minimum, is selected as the best candidate l
∗
k
of the
same labeled candidates l
k
. In order to find the best
tooth model A
∗
, our approach is to determine the best
tooth model per tooth t
k
∈ t
j,s
d
in the search space. Let
||a
k−1
, a
k
|| represent the distance between the centers
of the adjacent teeth as the optimum distance and let
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
138
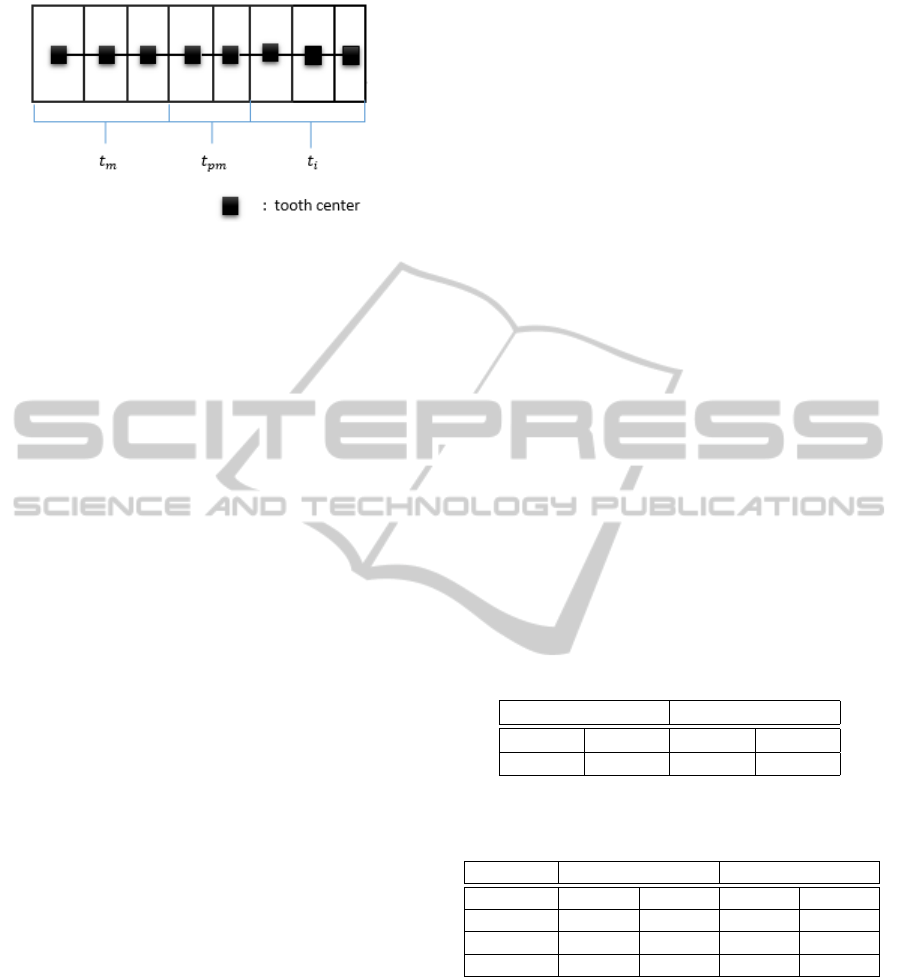
Figure 3: The atlas-based model used for labeling.
||l
k−1
, l
k
|| represent the distance between the CTP as
the actual distance. The tooth cost cost(t
k
) computes
the difference between the optimum and the actual
distance as
cost(t
k
) = abs(||a
k−1
, a
k
|| − ||l
k−1
, l
k
||), (1)
where abs is the absolute value function. The pro-
cedure of computing the cost(t
k
) is repeated for all of
the teeth t
k
∈ t
j,s
d
and for all of the atlas models A
k
∈ A.
For each tooth, the tooth costs, which are computed
according to the atlas models, are summed up to find
the best model A
∗
per tooth and the teeth are labeled
according to the selected atlas models for each tooth
with the following equation:
A
∗
= argmin
cost
j,s
i
∑
cost
j,s
i
(t
k
), (2)
where cost
j,s
i
represents the cost of tooth t
i
on jaw j
and side s.
5 EXPERIMENTAL RESULTS
The proposed system is tested on a dataset contain-
ing panoramic dental images. The images are taken
from 35 different subjects over 18 years old. The
panoramic images involve implants, dental works,
and missing teeth. In the detection stage, the SVM is
trained using 50 positive and 100 negative delineated
tooth images. The maximum size of the training tooth
images is used as the window size.
Our software, which is written in C++, utilizes the
Haar filters of the OpenCV library for feature extrac-
tion and uses the SVM function in the Waikato En-
vironment for Knowledge Analysis (WEKA) (Hall,
2009) program for classification.
The prediction accuracy of the detection module
is evaluated using the metric which calculates the rate
of the accurate predictions to all the predictions. In
order to measure the accuracy rate, we initially es-
tablish reference images for each test image in which
the contours of the teeth are marked using our system
according to the expert information. A prediction is
evaluated as accurate if a tooth in the reference im-
age is inside the corresponding window at least %70
rate. Table 2 shows the numerical results and Figure
4 shows the visual results of the detection module.
The accuracy rate of the detection module is low
due to the similarity of teeth in the different tooth sets.
Because the structure of the molars are very similar
to the premolars, the neighboring molars are also de-
tected as premolars. In addition, the extracted features
may not be representative enough to detect a particu-
lar tooth of a tooth set in a dental panoramic image.
Despite of the fact that the accuracy is increased by
the labelling module, more robust features may be in-
vented to get better results. It should be emphasized
that this module only tries to find the CTP which limit
the search space for the labeling module.
In the labeling module, we establish 7 atlas based
models taking the minimum and the maximum tooth
widths in the training set into account. We evaluate
the labeling module using a similar metric with the
detection module. However, in this module, a predic-
tion is accepted as accurate if the center of the pre-
dicted window is inside the corresponding reference
tooth contours. The numerical and visual results of
the labeling module are presented by Table 1 and Fig-
ure 5, respectively.
Table 1: The average accuracy rates of the tooth labeling
module.
Upper Jaw Lower Jaw
Right Left Right Left
0.813% 0.808% 0.835% 0.800%
Table 2: The average accuracy rates of the proposed tooth
detection module.
Upper Jaw Lower Jaw
Right Left Right Left
molar 0.472% 0.478% 0.677% 0.685%
premolar 0.432% 0.423% 0.359% 0.419%
incisor 0.587% 0.595% 0.800% 0.842%
The labeling is based on (i) the candidate tooth lo-
cations, (ii) the mouth gap, (iii) the labeling model,
and (iv) the labeling method. Therefore, the results
may be enhanced if (i) the detection stage is im-
proved, (ii) the image is enhanced before detection,
(iii) more complex models such as the Markov chain
graphical model is utilized to represent the mouth
and the teeth better, and (iv) the methods are en-
hanced such that both the global and local relations
between the teeth and the mouth are considered suf-
ficiently. The results of the detection module is dis-
AutomaticToothIdentificationinDentalPanoramicImageswithAtlas-basedModels
139
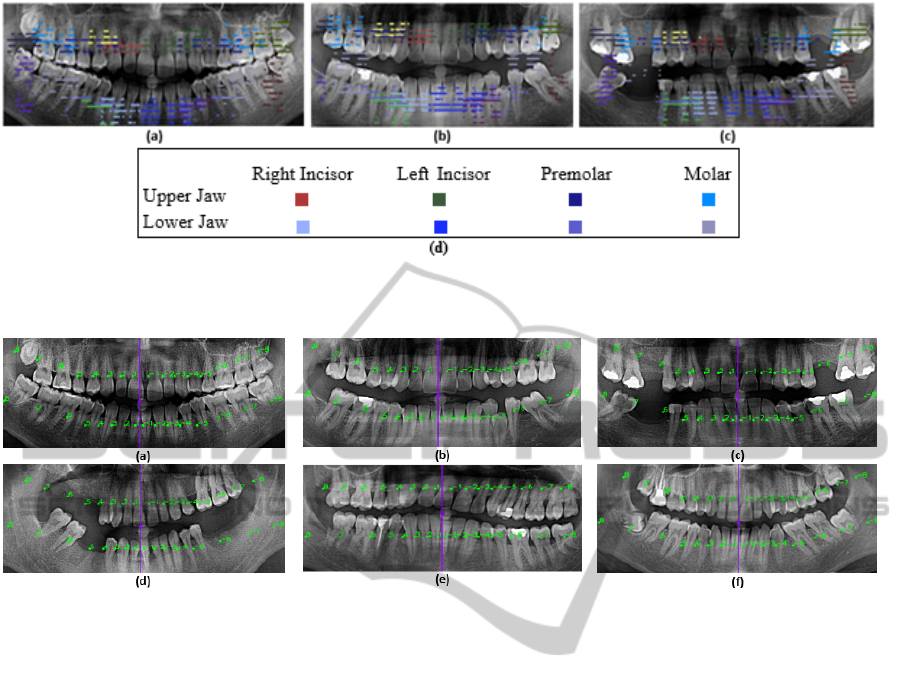
Figure 4: (a-c) The visual detection results. Each color represents one tooth class t
j,s
c
where c ∈ {molar, premolar, incisor},
jaw j ∈ {up, down}, and side s ∈ {right, le f t}, and (d) represents the colors and corresponding tooth classes.
Figure 5: (a-f) The final labels determined by our system. In the images (a-c) the final labels are accurately determined;
however in the images (d-f) some of the labels are inaccurately determined because of inaccurate mouth gap prediction in (d)
and (f) and the obliquity in (e).
cussed above. In addition, instead of binary values,
probability scores representing the accuracy degree
may be produced for the candidate detections and
these values may be utilized for labeling. Further-
more, different feature descriptors and classifiers may
be fused to determine the most probable candidates.
6 CONCLUSIONS
In this paper, we introduce a tooth identification sys-
tem consisting of the detection and labeling modules.
The system first produces the CTP by the SVM classi-
fier which uses the Haar features. After that, the label-
ing is employed according to the optimal atlas based
model within the probable models which are con-
structed based on the geometrical information. The
optimal model selection is performed with the cost
function minimization technique. The cost function
computes the distances of the candidate locations and
the expected locations. The results show that our al-
gorithm is promising to detect and label the teeth in
the panoramic radiographic images.
As future work, we plan to enhance both the detec-
tion and the labeling approaches by taking the global
appearance of the panoramic image into account and
by using more salient tooth features for tooth detec-
tion. Moreover, the best candidates may be deter-
mined by fusing the results of several feature descrip-
tors and the classifiers, such that each component in-
creases the probability score if the candidate is de-
tected. In summary, the system is capable to be en-
hanced to produce more accurate results.
ACKNOWLEDGEMENTS
This work was supported by TUBITAK project
named “113E114- Human Identification using Dental
Radiographs as Biometrics”.
REFERENCES
Abdel-Mottaleb, M., Nomir, O., Nassar, D., Fahmy, G.,
and Ammar, H. (2003). Challenges of developing an
automated dental identification system. In Circuits
and Systems, 2003 IEEE 46th Midwest Symposium on,
volume 1, pages 411–414 Vol. 1.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
140

Frejlichowski, D. and Wanat, R. (2011). Extraction of teeth
shapes from orthopantomograms for forensic human
identification. In Real, P., Diaz-Pernil, D., Molina-
Abril, H., Berciano, A., and Kropatsch, W., editors,
Computer Analysis of Images and Patterns, volume
6855 of Lecture Notes in Computer Science, pages
65–72. Springer Berlin Heidelberg.
Guzel, S. (2014). Automatic tooth detection and labelling
from panoramic radiographic images. Master’s thesis,
Thesis, Fatih University.
Hall, M., F. H. P. R. W. (2009). The weka data mining
software:an update.
Jain, A., Chen, H., and Minut, S. (2003). Dental biomet-
rics: Human identification using dental radiographs.
In Kittler, J. and Nixon, M., editors, Audio- and Video-
Based Biometric Person Authentication, volume 2688
of Lecture Notes in Computer Science, pages 429–
437. Springer Berlin Heidelberg.
Jain, A. K. and Chen, H. (2005). Registration of dental at-
las to radiographs for human identification. In Jain,
A. K. and Ratha, N. K., editors, Biometric Technology
for Human Identification II, volume 5779 of Society
of Photo-Optical Instrumentation Engineers (SPIE)
Conference Series, pages 292–298.
Lin, P. and Lai, Y. (2009). An effective classification sys-
tem for dental bitewing radiographs using entire tooth.
In Intelligent Systems, 2009. GCIS ’09. WRI Global
Congress on, volume 4, pages 369–373.
Lin, P., Lai, Y., and Huang, P. (2010). An effective classi-
fication and numbering system for dental bitewing ra-
diographs using teeth region and contour information.
Pattern Recognition, 43(4):1380 – 1392.
Mahoor, M. H. and Abdel-Mottaleb, M. (2005). Classifica-
tion and numbering of teeth in dental bitewing images.
Pattern Recognition, 38(4):577 – 586.
Papageorgiou, C., Oren, M., and Poggio, T. (1998). A gen-
eral framework for object detection. In Computer Vi-
sion, 1998. Sixth International Conference on, pages
555–562.
Pushparaj, V., Gurunathan, U., and Arumugam, B. (2013).
An effective dental shape extraction algorithm using
contour information and matching by mahalanobis
distance. Journal of Digital Imaging, 26(2):259–268.
Sen, D. R. (2010). Forensic Dentistry. CRC Press.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Computer Vi-
sion and Pattern Recognition, 2001. CVPR 2001. Pro-
ceedings of the 2001 IEEE Computer Society Confer-
ence on, volume 1, pages I–511–I–518 vol.1.
Zhou, J. and Abdel-Mottaleb, M. (2005). A content-based
system for human identification based on bitewing
dental x-ray images. Pattern Recogn., 38(11):2132–
2142.
AutomaticToothIdentificationinDentalPanoramicImageswithAtlas-basedModels
141
