
User-driven Nearest Neighbour Exploration of Image Archives
Luca Piras, Deiv Furcas and Giorgio Giacinto
Department of Electrical and Electronic Engineering, University of Cagliari, Piazza D’armi, Cagliari, 09123, Italy
Keywords:
Feature Space Exploration, Nearest Neighbour, Relevance Feedback, Query Shifting, Image Retrieval.
Abstract:
Learning what a specific user is exactly looking for, during a session of image search and retrieval, is a problem
that has been mainly approached with “classification” or “exploration” techniques. Classification techniques
follow the assumption that the images in the archive are statically subdivided into classes. Exploration ap-
proaches, on the other hand, are more focused on following the varying needs of the user. It turns out that
image retrieval techniques based on classification approaches, though often showing good performances, are
not prone to adapt to different users’ goals. In this paper we propose a relevance feedback mechanism that
drives the search into promising regions of the feature space according to the Nearest Neighbor paradigm. In
particular, each image labelled as being relevant by the user, is used as a “seed” for an exploration of the space
based on the Nearest Neighbors paradigm. Reported results show that this technique allows attaining higher
recall and average precision performances than other state-of-the-art relevance feedback approaches.
1 INTRODUCTION
Nowadays, the high availability of pictures that dig-
ital cameras, tablets and smart-phones allows us to
quickly capture, makes more and more pressing the
need for systems that categorize and label our image
archives in a “smart” way. While search engines on
the internet such as Google and Bing play this role
very well for images published on the web, effec-
tive approaches for personal and professional image
archive search still require further investigation (Sivic
and Zisserman, 2008).
Over the years, Content Based Image Retrieval
(CBIR) techniques proved to be a good choice. Users
query the system using a sample image, and expect
that the system returns a set of images of the same
category of the query. To perform this task, im-
ages are described through low-level features such as,
for example, color, texture, shapes, or characteristic
points. It is easily understood that the way in which
these characteristics are represented inevitably con-
strains the results that can be obtained (Datta et al.,
2008; Thomee and Lew, 2012). In addition, these ap-
proaches are always dependent on the choice of the
low-level features and the used metrics (Lew et al.,
2006; Pavlidis, 2008).
One of the main problems to face when a user is
interested in performing a so-called “category” search
is that different users have different perceptions of
similarity and, often, at the beginning of the search
process, the user may not have a clear idea of the im-
ages she is looking for. It is a common experience that
at the time the user begins the search, she has in mind
a rough idea of what she wants, and only after having
seen several examples, and having explored part of
the archive, she can focus her search more precisely.
In order to “help” Image Retrieval Systems to fol-
low the user in this path, it is necessary to provide
the system with a mechanism that interprets the will
of the user and adapt itself to it. In the past years,
several Relevance Feedback (RF) mechanisms have
been proposed for this task, where the user can judge
the images that the system returns as being relevant or
not w.r.t. the user’s query, and label them accordingly
(Zhou and Huang, 2003). Over the years, the problem
of learning what a specific user is exactly looking for
has been mainly approached in two different ways,
i.e., by “classification” or “exploration” approaches.
The first approach is essentially based on training a
pattern classifier using the set of images that the user,
at each relevance feedback iteration, labels as being
relevant or not (Thomee and Lew, 2012). In this way
it is possible to incrementally create a training set that
allows the classifier to “understand” the user’s tastes.
Several approaches follow this line of thinking and,
as in other fields of Pattern Recognition and Machine
Learning, Support Vector Machines (SVM) have been
widely employed (Rao et al., 2006; Chen et al., 2001;
181
Piras L., Furcas D. and Giacinto G..
User-driven Nearest Neighbour Exploration of Image Archives.
DOI: 10.5220/0005183401810189
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 181-189
ISBN: 978-989-758-076-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Hoi et al., 2009; Zhang et al., 2001; Tong and Chang,
2001). Even if SVMs are often used for Image Re-
trieval tasks, reported results often do not disclose the
fact that good performance is strictly dependent on
the choice of the most appropriate SVM kernel and
the associated parameters. In addition, classification
approaches, due to their own characteristics, tend to
be static and not prone to adapt to the fickle needs
of the user, because the underlying assumption is that
the images in the archive can be thought as being stat-
ically subdivided into classes, and user’s feedback is
used to sample the class distribution of images.
On the other hand, approaches based on “explo-
ration” paradigms aim to explore the feature space not
only in the area of the initial query image, but also in
different neighborhoods computed according to rel-
evance information. Thanks to this prerogative, ex-
plorative approaches tend to be highly responsive be-
cause they are explicitly designed to follow the user’s
needs. For example, approaches based on the Nearest
Neighbor (NN) paradigm can be used to easily im-
plement explorative approaches (Piras et al., 2012),
thanks to the very limited number of parameters to be
set (Boiman et al., 2008).
Another issue that has been investigated in the past
in the Relevance Feedback field, is related to the way
the images are presented to the user. Often, the first
n best ranked images are shown to the user, and, usu-
ally, these images are located in a limited area of the
feature space quite close to the initial query. In this
way, after the first few iterations, the system might
not be able to find new relevant images to present to
the user if the search converges towards a local opti-
mum (Piras et al., 2012).
The above considerations motivate the proposal in
this paper, i.e., to exploit the simplicity of the NN
paradigm, based on the concept that similar images
are located in adjacent areas of the feature space.
In particular, we introduce the concept of “transitive
similarity”, where two patterns I
1
and I
3
can be con-
sidered similar if I
2
is in the neighborhood of I
1
and I
3
is in the neighborhood of I
2
. This concept is not new,
and it has been inspired by the notion of data point
k − NN consistency for data clustering (Ding and He,
2004). We used this concept for computing, at each
iteration, an exploration seed point that takes into ac-
count the set of relevant and not relevant images re-
trieved so far. Then, we evaluate the neighborhood
of this seed point, and, for each neighbor, we con-
sider its nearest neighbors. In this way, we avoid to
focus on a limited area of the feature space by consid-
ering a large number of neighbors of the initial seed,
as it may contain a large fraction of non-relevant im-
ages. On the other hand, the proposed mechanism al-
lows exploring a larger number of search directions of
the representation space, thus driving the search into
“new” regions of the feature space where to find rele-
vant images.
To illustrate in detail the proposed mechanism,
this paper is organized as follows. Section 2 briefly
reviews the related works on relevance feedback.
Section 3 describes the proposed relevance feedback
technique, that we named “Nearest Neighbour Ex-
ploration Path”. Experimental results are reported in
Section 4. Conclusions are drawn in Section 5.
2 RELEVANCE FEEDBACK AND
EXPLORATION OF THE
FEATURE SPACE
The problem of finding and showing to the user
new relevant images during her exploration of im-
age archives has been addressed in the field of CBIR
in different ways. One of the first techniques used
to perform relevance feedback, that is still used in a
number of image retrieval applications, is based on
the query shifting paradigm. Originally, the query
shifting mechanism has been developed in the text re-
trieval field, and based on the Rocchio formula (Roc-
chio, 1971). This formula has been then proposed
for relevance feedback for CBIR tasks in (Rui et al.,
1997):
Q
opt
=
1
N
R
∑
i∈D
R
D
i
−
1
N
T
−N
R
∑
i∈D
N
D
i
(1)
Where D
R
and D
N
are the sets of relevant and non rel-
evant images respectively, N
R
is the number of images
in D
R
, N
T
the number of the total documents, and D
i
is the representation of an image in the feature space.
This approach is motivated by the assumption that the
query may lie in a region of the feature space that is
in some way “far” from the images that are relevant to
the user. On the contrary, according to the Eq.(1), the
optimal query should lie near to the euclidean center
of the relevant images and ‘far” from the non relevant
images. The same line of thinking has been also fol-
lowed in (Giacinto and Roli, 2004a) where a Bayesian
model for estimating the decision boundary between
relevant and non-relevant images has been employed
(see Section 3.1).
Relevance Feedback has been also formulated in
terms of a pattern classification task using neural
networks, self-organizing maps (SOMs) (Laaksonen
et al., 2002) or approaches based on SVM. The latter
have been widely used to model the concepts behind
the set of relevant images, and adjust the search ac-
cordingly (Zhang et al., 2001; Chen et al., 2001). In
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
182

these cases, it is usually difficult to produce a high-
level generalization of a “class” of objects as it is dif-
ficult to provide a general model that can be adapted
to represent different concepts of similarity. In addi-
tion, the number of available cases may be too small
to estimate the optimal set of parameters for such a
general model. This kind of problems have been par-
tially mitigated thanks to the use of the active learn-
ing paradigm (Cohn et al., 1994), where the system
is trained not only with the most relevant images ac-
cording to the user judgement, but also with the most
informative images that allow driving the search into
more promising regions of the feature space. One of
the approaches used to select informative images is
based on choosing the patterns closest to the decision
boundary, as described in (Hoi et al., 2009; Tong and
Chang, 2001) where SVM based on active learning
are used. In addition, Nearest Neighbor techniques
have been used in the context of the active learning
paradigm: in (Lindenbaum et al., 2004) the authors
proposed to perform selective sampling for Nearest
Neighbor classifiers. In order to choose the most in-
formative patterns, the authors suggest to consider
the effect of its classification on the remaining unla-
beled points. Their algorithm is based on sampling
sequences of neighboring patterns of length k, and se-
lects an example that leads to the best sequence. The
best sequence is the one whose samples have the high-
est conditional class probabilities.
The Nearest Neighbor paradigm over the years
has been adapted in several forms for the exploita-
tion of relevance feedback. One of these forms ex-
ploits relevance feedback by comparing all the images
of the database against relevant and non-relevant im-
ages, and assigns to each image a Relevance Score
(Giacinto, 2007) as follows:
rel
NN
(I) =
k
I − NN
nr
(I)
k
k
I − NN
r
(I)
k
+
k
I − NN
nr
(I)
k
(2)
where NN
r
(·) and NN
nr
(·) denote the nearest relevant
and non relevant image of the image I respectively,
and k · k is the metric defined in the feature space at
hand. In (Arevalillo-Herr
´
aez and Ferri, 2010) the au-
thors propose to modify that formulation introducing
a smoothed NN estimate (SNN) in order to increase
the importance of the images more relevant to the
user query. In (Arevalillo-Herr
´
aez and Ferri, 2013)
instead, an improved score using a reliability estimate
has been proposed.
Apart from the techniques based on active learn-
ing, that are, however, based on a classification ap-
proach, there are not many papers focused on the ex-
ploration of the feature space. It is worth to note that
also the approaches based on the Nearest Neighbor
paradigm, that have a more clear explorative voca-
tion, have been usually focused on maximizing the re-
trieval precision rather than on the exploration of the
feature space, thus maximizing the recall. Our work
aims to fill this gap.
3 NEAREST NEIGHBOR
EXPLORATION PATH
Let us assume that the set of low-level features that
we have extracted from each image of an archive, are
such that a pair of images judged by the user as being
similar to each other is represented by two near points
in the feature space. While often CBIR tasks have
been formulated in terms of a user that is interested in
retrieving images belonging to a specific “category”,
we formulate the problem in terms of a user that is
looking for “something similar” to the submitted im-
age query, without any clear specification of a “cate-
gory” the images should belong to. According to the
first assumption, the images the user is interested in
lie in a neighborhood of the query. If this assumption
turns out to be true, i.e., the query lies in a region of
the feature space where other similar images surround
it, an isotropic search based on the Nearest Neighbor
paradigm would allow retrieving a large number of
relevant images.
Unfortunately, this configuration of the initial im-
age query does not occur very frequently, and, in any
case, being particularly easy to deal with, does not
deserve further investigation. Much more interesting
are the cases in which the initial query is close to re-
gions containing images that are not relevant to the
user’s needs. In these cases we can distinguish be-
tween two possible configurations that are depicted in
Fig. 1: a more favorable one in which the boundary
between relevant and non-relevant images can be ap-
proximated as a convex hull within the area of influ-
ence of the query (Fig. 1(a)), and another one in which
the separation between relevant and non-relevant im-
ages is not so clear (Fig. 1(b)). In the last case, an
approach that just explores the feature space in the
neighborhood of the query according to an isotropic
NN search, is not effective. On the other hand, a tech-
nique that better explores the features space where the
query lies, and is able to find more “interesting” re-
gions where to perform the search for relevant images,
is highly desirable.
In this section we provide the details of the two ex-
ploration methods that we propose in this paper. Both
methods are based on the same anisotropic approach,
that exploits the Nearest Neighbor paradigm in two
different ways. The underlying rationale is the con-
cept of “transitive similarity”, where two patterns I
1
User-drivenNearestNeighbourExplorationofImageArchives
183
(a) The NN paradigm + BQS in
a favorable situation
(b) The NN paradigm + BQS in
an unfavorable situation
(c) The NN paradigm + “NN Exploration path” in
a favorable situation
(d) The NN paradigm + “NN Exploration path” in
an unfavorable situation
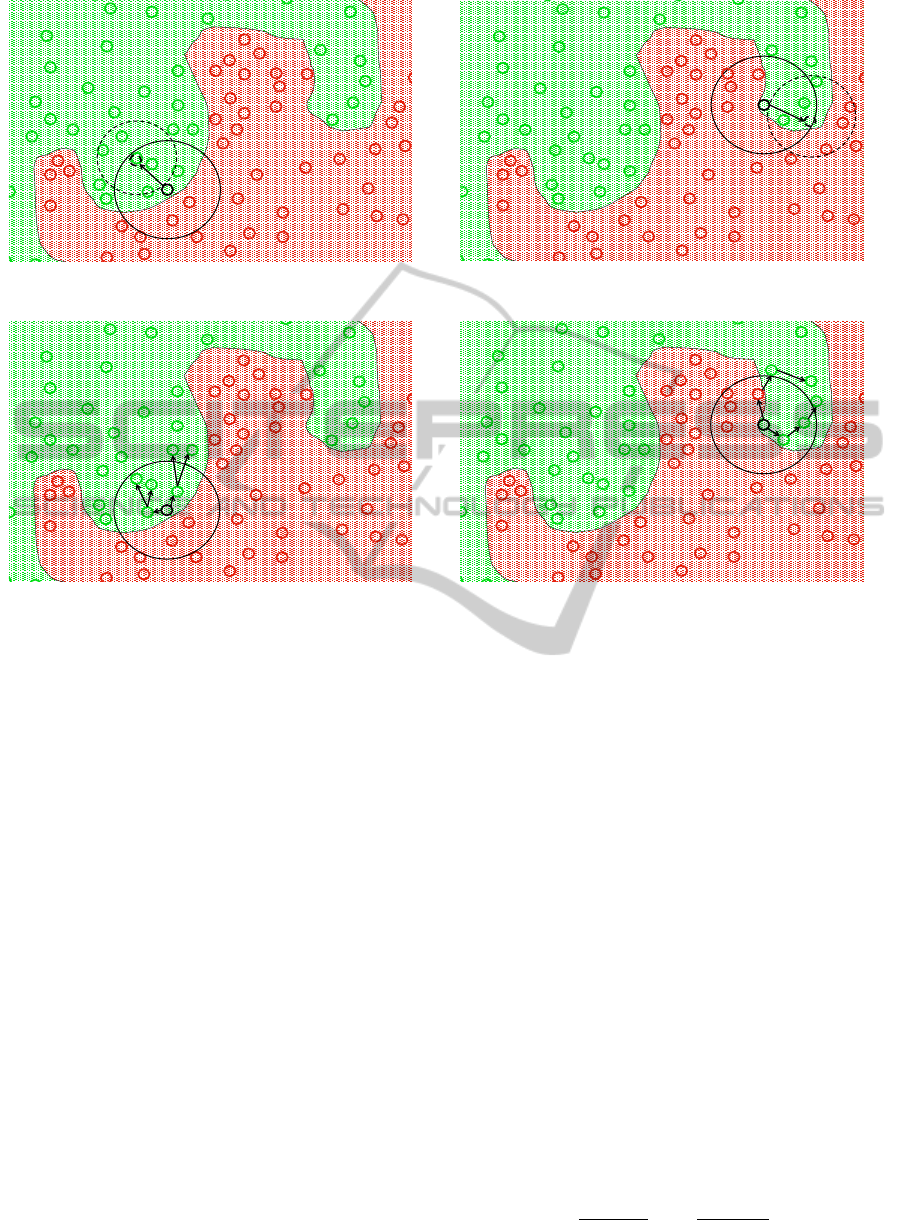
Figure 1: The proposed Nearest Neighbor Exploration path algorithm in different situation compared to the BQS technique.
The black circle represents the query, the green circles the images relevant to the query, the red circles the non relevant ones.
Figure (c) shows the NN Exploration path through the N + N · M nearest points where N = 2, M = 2, and k = 6. Figure (d)
shows the NN Exploration path through the N · M nearest points where N = 2, M = 3, and k = 6.
and I
3
can be considered similar if I
2
is in the neigh-
borhood of I
1
and I
3
is in the neighborhood of I
2
. This
concept is inspired by the notion of data point k − NN
consistency for data clustering (Ding and He, 2004).
In particular, if we are interested in retrieving k im-
ages relevant to the query (Q), instead of extracting
the k nearest neighbors of Q, we use N < k nearest
neighbors of Q, and then, for each neighbor, we com-
pute its nearest neighbors, so that the total number of
images is k (see Fig. 1(c)). In this way, we consider
the closest neighbors of Q, that are the most similar to
Q by definition, and then we consider the most similar
patterns to the neighbors of Q. Thus we do not take
into account those images that may be loosely related
to the query as their distance from it is larger than the
distance of the nearest neighbors of each image in the
neighborhood of Q.
The proposed methods are based on the computa-
tion of a reference point that we will call the “seed” in
the following. Basically, we explore the feature space
starting from the nearest point of the current seed. At
the first step the role of seed is assigned to the query
image, that the system receives as an input data. From
the second iteration onwards, the role of the seed is
taken by the query shifting mechanism computed ac-
cording to (Giacinto and Roli, 2004a) that is briefly
reviewed in the next subsection. Then, distances from
the seed and each other image are calculated.
3.1 Bayesian Query Shifting (BQS)
In order to limit the exploration in regions not too far
away from the region where known relevant images
lie, the exploration approaches, that we show in the
next sections, are seeded by a query point movement
strategy (QPM) (Rocchio, 1971). In particular, in this
paper at each iteration the role of the seed is played by
a modified query vector computed according to the
Bayes decision theory (Bayes Query Shifting, BQS)
(Giacinto and Roli, 2004a):
Q
BQS
= m
R
+
σ
k
m
R
−m
N
k
1 −
k
R
−k
N
max(k
R
,k
N
)
(m
R
− m
N
)
(3)
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
184

where m
R
and m
N
are the mean vectors of relevant
and non-relevant images respectively, σ is the stan-
dard deviation of the images belonging to the neigh-
borhood of the original query, and k
R
and k
N
are the
number of relevant and non relevant images, respec-
tively. The new query Q
BQS
lies on the line connecting
the two means, in the m
R
m
N
direction, the magnitude
of the shift depending on the proportion of relevant
and non-relevant images retrieved.
3.2 NN Exploration Path through the
N + N · M Nearest Points
In order to explore the feature space in different di-
rections, the first method we propose begins the ex-
ploration from N different points around the current
seed Q (i.e., the initial query, or the BQS) that we
can indicate as belonging to the set S
0
= {NN
i
(Q) |
i = 1, . . . , N} where NN
i
(Q) is the i
th
nearest point
of the seed Q. With the purpose of maximizing the
exploration area, this algorithm is designed to avoid
overlaps between the portions of space explored by
different seeds. From these new seed points the algo-
rithm continues to explore considering their M nearest
images in S
0
= {NN
j
(x) | x ∈ S
0
, j = 1, . . . , M}. The
values of N and M are chosen such that N + N ·M = k
where k is the number of images to show to the user
(e.g., Fig. 1(c)). The algorithm can be summarized in
the following steps:
1. Let Q the first seed point and NN(·) the func-
tion that denote the nearest image, for i = 1, . . . , N
evaluate NN
i
(Q).
2. Given the set S
0
= {NN
i
(Q) | i = 1, . . . , N}, ∀x ∈
S
0
evaluate NN
j
(x) for j = 1, . . . , M.
3. Given the set S
0
= {NN
j
(x) | x ∈ S
0
, j = 1, . .. , M}
the set of images to be shown to the user will be
S
k
= S
0
∪ S
0
3.3 NN Exploration Path through the
N · M Nearest Points
This second method performs the exploration of the
feature space beginning from the N nearest images to
the current seed Q (i.e., the initial query, or the BQS).
As we showed in Section 3.2, the set of the new seed
points is S
0
= {NN
i
(Q) | i = 1, . . . , N}, and, for each
neighbour, we select its nearest neighbour that will
play the role of a seed in the following phases of ex-
ploration. Accordingly, the set of seed points will be
S
j
= {NN(x) | x ∈ S
j−1
, j = 1, . . . , M}. The values of
N and M are chosen such that N · M = k where k is the
number of images to show to the user (e.g., Fig. 1(d)).
The algorithm can be summarized in the following
steps:
1. Let Q the first seed point and NN(·) the func-
tion that denote the nearest image, for i = 1, . . . , N
evaluate NN
i
(Q).
2. Given the set S
0
= {NN
i
(Q) | i = 1, . . . , N}, ∀x ∈
S
0
evaluate NN(x).
3. Given the set S
j
= {NN(x) | x ∈ S
j−1
, j =
1, . . . , M} the set of images to be shown to the user
will be S
k
= S
0
∪ S
0
∪ ··· ∪ S
M
Summing up, this technique differs from the previous
one in the number of neighbors considered. While
here we consider just the nearest neighbor point for
each of the N points in the neighborhood of the cur-
rent seed, the former technique takes into account M
points for each of the N points in the neighborhood of
the current seed.
Figures 1(c) and 1(d) depict two examples of the
use of the two proposed approaches. The first one
shows the NN Exploration path through the N +N · M
nearest points where N = 2, M = 2, and k = 6.
Fig. 1(d) shows the second approach, i.e., the N · M
nearest points, where N = 2, M = 3, and k = 6. The
black circle represents the initial query, the green cir-
cles the images relevant to the query, the red circles
the non-relevant ones. It is possible to see how in
a favorable situation (e.g., Fig. 1(a) and 1(c)) both
a query point movement strategy (such as the BQS),
and the use of one of the proposed approaches are able
to find images that are relevant to the query. On the
other hand, in an unfavorable situation, an isotropic
NN search would retrieve the k nearest images to the
query, disregarding the fact that the volume that con-
tains these images could have a large radius, and thus
incorporate a large number of images that are non-
relevant to the query. Our approach, instead, ex-
plores the feature space in the neighborhood of the
query “step by step”, through images close to each
other, and thus it is able to find more “interesting”
regions where to perform the search for relevant im-
ages. From Fig. 1(d) it is also possible to observe that
even if one of the nearest images is non-relevant to the
user query, our method is able to “correct” the path.
This behavior could be explained by the assumption
that the extracted features are such that a pair of im-
ages judged by the user as being similar to each other
is represented by two near points in the feature space.
In this situation, is thus likely that the retrieved non-
relevant images are in some-way similar to the rele-
vant ones and near to other relevant images.
User-drivenNearestNeighbourExplorationofImageArchives
185

4 EXPERIMENTAL RESULTS
4.1 Dataset
Experiments have been carried out using a subset of
the Corel dataset obtained from the UCI KDD repos-
itory
1
. The dataset consists of 30,000 images man-
ually subdivided into 71 semantic classes (Giacinto
and Roli, 2004b). Images have been represented us-
ing the four features vectors available at the UCI web
site: Color Histogram, Color Histogram Layout, Co-
Occurrence Texture and Color Moments. Distances
between features have been evaluated using the his-
togram intersection (Swain and Ballard, 1991) on the
color histograms and the Euclidean distance for the
other descriptors, they have been normalized in the
range [0,1], and then summed up (Arevalillo-Herr
´
aez
and Ferri, 2013) in order to obtain a unique value.
4.2 Experimental Setup
In order to test the performance of the proposed ap-
proaches, 500 query images from the dataset have
been randomly extracted, so that they cover all the
semantic classes. Relevance feedback is performed
by marking images belonging to the same class of the
query as relevant, and all other images in the pool of k
to-be-labelled images as non-relevant. Performance is
evaluated in terms of Precision, Recall, and Average
Precision (Wang et al., 2010) that measures the aver-
age value of precision for each different recall value:
AP =
1
R
n
∑
i=1
rel(τ(i))
∑
i
j=1
rel(τ( j))
i
(4)
where R is the number of relevant images, n is the
number of images in the dataset, τ(i) is the image at
the rank i, and rel(τ(i)) is the associated binary rel-
evance label equal to 1 if τ(i) is relevant w.r.t. the
query, and 0 otherwise. The higher the value of AP,
the better the ranking. To measure the Recall, the im-
ages that have been already labelled in a previous it-
eration are not considered as candidate for the next it-
erations. On the contrary, in measuring the Precision,
all the images are considered as candidate in each it-
eration (Arevalillo-Herr
´
aez and Ferri, 2013).
For comparison purposes, the proposed approach
has been compared against four approaches based on
the NN paradigm: a NN technique enhanced with a
smoothed estimator (SSN) as in (Arevalillo-Herr
´
aez
and Ferri, 2010); a distance based approach where
the image score is improved using a reliability esti-
mate (Distance Based) (Arevalillo-Herr
´
aez and Ferri,
1
http://kdd.ics.uci.edu/databases/CorelFeatures/CorelFeatures.html
2013); an approach where the image relevance is esti-
mated using a Relevance Score that takes into account
the position in the feature space of the known rele-
vant and non-relevant images (NN + BQS) (Giacinto,
2007), and an extension of the previous work where
an exploration component has been introduced (NN +
BQS + EE) (Piras et al., 2012). In the latter approach
the parameters have been set according to the results
obtained by the authors, in particular the parameter
“α” has been set equal to 25%.
User’s feedback has been also used to build the
training set for an active SVM classifier (Tong and
Chang, 2001). The choice of an active approach is
due to its good performance in image retrieval tasks
and in order to compare exploration techniques with
a classification approach at the state of the art under
the best possible setting. As SVM training requires
choosing the kernel and the kernel parameters, a num-
ber of experiments have been performed using differ-
ent kernels and different kernel parameters. Reported
results are related to a Gaussian kernel as described in
the original publication.
In order to provide the reader with a broader com-
parison, other relevance feedback algorithms have
been considered: a query point movement approach
(QPM) as the one described in Section 3.1; a prob-
abilistic framework presented in (Arevalillo-Herr
´
aez
et al., 2010) (Probabilistic); and the self-organizing
map (SOM) method introduced in (Laaksonen et al.,
2002).
4.3 Results
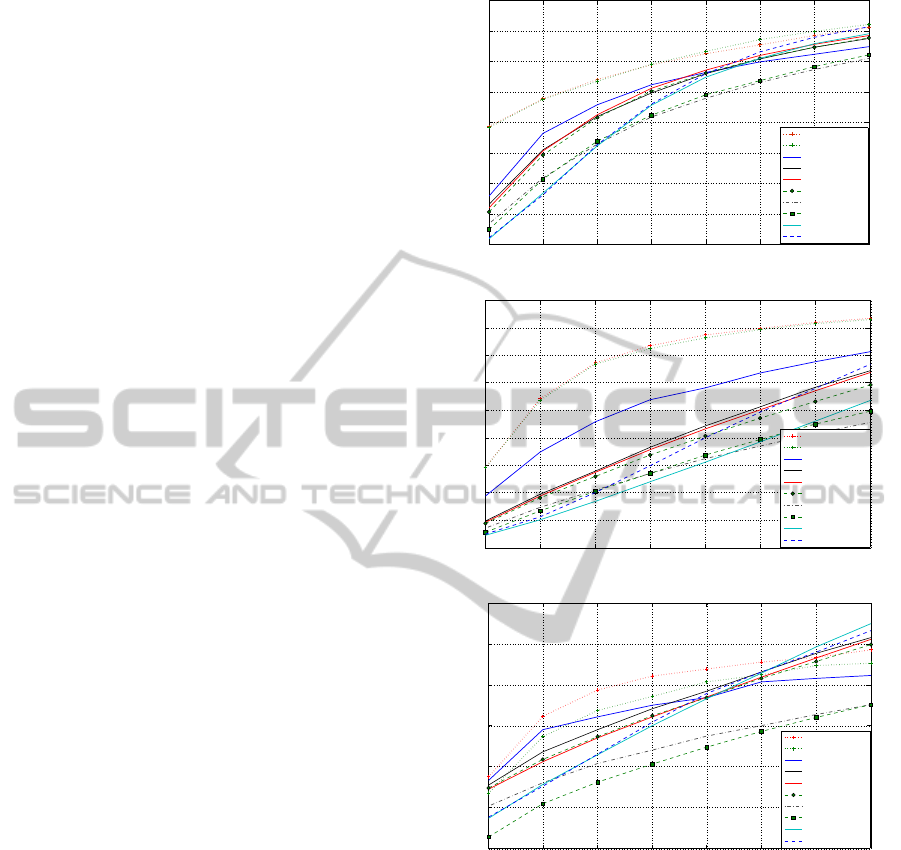
Figure 2 shows the performance for the methods pro-
posed in Sections 3.2 (NN-E (N +N ·M)) and 3.3 (NN-
E (N · M)) using N = 5, M = 4, and k = 20 for the lat-
ter and N = 5, M = 3, and k = 20 for the first one. In
order to choose the parameter that allowed attaining
the highest performance, a number of preliminary ex-
periments have been performed on a small subset of
data.
It is easy to see how the proposed approaches pro-
vide better performance in terms of Precision and Re-
call than all the other methods. By considering the
Average Precision, the proposed methods exhibit a
higher performance than all the other approaches until
the fifth/sixth iteration. Although the Average Preci-
sion may be of less interest for an approach focused
on CBIR, it is interesting to see how the proposed al-
gorithms work very well in the first few iterations, that
are the ones performed by the vast majority of users,
as typically just a tiny fraction of users go on after the
forth/fifth iteration (Tronci et al., 2013).
This behavior can be explained by considering
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
186
that the proposed approaches, after the first few iter-
ations, explore regions where the number of relevant
images is very small and the proposed algorithms are
still able to find some images similar to the query,
even if with a smaller increase than at the first few
iterations.
The proposed techniques are also able to perform
better in Recall than the NN + BQS + EE approach,
that, as expected, outperformed the NN + BQS mech-
anism thanks to the exploitation of the relevance feed-
back for exploring the feature space. In this case too,
all the relevance feedback mechanisms based on Ex-
ploration approaches, work well till the fifth iteration
in terms of Precision and Average Precision.
The results attained using the SVM Active ap-
proach show that the performance in the first few
iterations is very low w.r.t. the other approaches.
This is due to the too small number of samples to
learn a model, and this is a problem that we observed
when using approaches based on the “classification”
paradigm, when no constraint is put on the minimum
number of training images.
If we compare the performance attained by the
two proposed approaches, the best results have been
obtained by the exploration through N + N · M near-
est points. The main reason behind this result is
the capability of this approach to expand the search
while remaining close to the area where relevant im-
ages lie. On the other hand, a drawback that can
arise when using the N · M nearest points technique
is that the approach could not be able to correct the
“path” if among the nearest N images there are too
many non-relevant images. The visual inspection of
the retrieval results confirmed the rationale behind the
“classification” approaches, and the “exploration” ap-
proaches. Classification mechanisms provided good
performance for those cases in which similar images
can be considered as “near duplicates”. The pro-
posed exploration mechanisms exhibited better per-
formance when a chain of similarities can be built
among images bearing the same concept, because
only small subsets of them can be considered as “near
duplicates”, the intersection of subsets providing the
link between different images with the same concept.
Thus, the proposed approaches proved to be more ef-
fective in concept retrieval thanks to their exploration
capabilities.
In order to test the significance of our results, the
Friedman test (Garc
´
ıa et al., ) has been performed for
each measure and query. This test demonstrated that
there is statistically significant difference in precision,
recall, and average precision among the proposed ap-
proaches and the best of the other methods (i.e., the
NN + BQS + EE technique) according to a post-hoc
1 2 3 4 5 6 7 8
10
20
30
40
50
60
70
80
90
Iterations
Precision %
Corel
NN−E (N + NM)
NN−E (NM)
NN+BQS+EE
NN+BQS
Distance based
SNN
QPM
SOM
SVM
Probabilistic
(a) Precision
1 2 3 4 5 6 7 8
0
1
2
3
4
5
6
7
8
9
Iterations
Recall %
Corel
NN−E (N +NM)
NN−E (NM)
NN+BQS+EE
NN+BQS
Distance based
SNN
QPM
SOM
SVM
Probabilistic
(b) Recall
1 2 3 4 5 6 7 8
4
6
8
10
12
14
16
Iterations
Average Precision %
Corel
NN−E (N + NM)
NN−E (NM)
NN+BQS+EE
NN+BQS
Distance based
SNN
QPM
SOM
SVM
Probabilistic
(c) Average Precision
Figure 2: Precision, Recall, and Average Precision for eight
rounds of relevance feedback. The proposed methods are
labelled NN − E(N + NM) and NN − E(NM), respectively.
Holm test at significance level α = 0.05. A fortiori, it
is possible to deduce the same for all the other meth-
ods. The only case in which the difference is not sta-
tistically significant, is the comparison between the
average precision obtained by (NN + BQS) and (NN-
E (N · M)) where, as it is possible to see from the Fig-
ure 2(c), the two lines are quite close.
User-drivenNearestNeighbourExplorationofImageArchives
187

5 CONCLUSIONS
In this paper we proposed two exploration approaches
based on the query reformulation and the Nearest
Neighbor paradigms. The main goal attained by the
proposed mechanisms is to be able to explore the fea-
ture space around the images labeled as being rel-
evant by the user, thus following the user’s explo-
rative behavior during a session of image search into
a visual database. Reported results show that the
proposed approach succeeded in showing the user a
greater number of new relevant images during the first
few iterations, in comparison with other techniques
either based on “classification”, or “exploration” ap-
proaches. We believe that the effectiveness of CBIR
systems strongly depends on its adaptive behavior in
response to relevance feedback. Accordingly, fur-
ther experiments aimed at testing the system with real
users are needed in order to assess the effectiveness
of the proposed approach compared to other state-of-
the-art relevance feedback mechanisms.
ACKNOWLEDGEMENTS
We would like to thank Dr. M. Arevalillo-Herrez
and Dr. F. J. Ferri for providing us with the details
of the results reported in (Arevalillo- Herra ez and
Ferri, 2013). This work has been partly supported
by the Regional Administration of Sardinia (RAS),
Italy, within the project Advanced and secure sharing
of multimedia data over social networks in the future
Internet (CRP 17555, L.R. 7/2007, Bando 2009).
REFERENCES
Arevalillo-Herr
´
aez, M. and Ferri, F. J. (2010). Interactive
image retrieval using smoothed nearest neighbor esti-
mates. In Hancock et al. ed., SSPR/SPR, LNCS 6218,
pp 708–717. Springer.
Arevalillo-Herr
´
aez, M. and Ferri, F. J. (2013). An improved
distance-based relevance feedback strategy for image
retrieval. Image Vision Comput., 31(10):704–713.
Arevalillo-Herr
´
aez, M., Ferri, F. J., and Domingo, J. (2010).
A naive relevance feedback model for content-based
image retrieval using multiple similarity measures.
Pattern Recognition, 43(3):619–629.
Boiman, O., Shechtman, E., and Irani, M. (2008). In de-
fense of nearest-neighbor based image classification.
In CVPR 2008. IEEE Computer Society.
Chen, Y., Zhou, X. S., and Huang, T. (2001). One-class
svm for learning in image retrieval. In ICIP 2001,
volume 1, pp 34 –37.
Cohn, D. A., Atlas, L. E., and Ladner, R. E. (1994). Im-
proving generalization with active learning. Machine
Learning, 15(2):201–221.
Datta, R., Joshi, D., Li, J., and Wang, J. Z. (2008). Image
retrieval: Ideas, influences, and trends of the new age.
ACM Computing Surveys, 40(2):1–60.
Ding, C. H. Q. and He, X. (2004). K-nearest-neighbor con-
sistency in data clustering: incorporating local infor-
mation into global optimization. In Haddad et al. ed.,
SAC 2004, pp 584–589. ACM.
Garc
´
ıa, S., Herrera, F., and Shawe-taylor, J. An extension
on “statistical comparisons of classifiers over multiple
data sets” for all pairwise comparisons. Journal of
Machine Learning Research, pp 2677–2694.
Giacinto, G. (2007). A nearest-neighbor approach to rele-
vance feedback in content based image retrieval. In
CIVR ’07, pp 456–463, New York, NY, USA. ACM.
Giacinto, G. and Roli, F. (2004a). Bayesian relevance
feedback for content-based image retrieval. Pattern
Recognition, 37(7):1499–1508.
Giacinto, G. and Roli, F. (2004b). Nearest-prototype rele-
vance feedback for content based image retrieval. In
ICPR 2004, pp 989–992.
Hoi, S. C. H., Jin, R., Zhu, J., and Lyu, M. R. (2009).
Semisupervised svm batch mode active learning with
applications to image retrieval. ACM Trans. Inf. Syst.,
27(3):16:1–16:29.
Laaksonen, J., Koskela, M., and Oja, E. (2002). PicSOM-
self-organizing image retrieval with MPEG-7 content
descriptors. IEEE Transactions on Neural Networks,
13(4):841–853.
Lew, M. S., Sebe, N., Djeraba, C., and Jain, R. (2006).
Content-based multimedia information retrieval: State
of the art and challenges. ACM Trans. Multimedia
Comput. Commun. Appl., 2(1):1–19.
Lindenbaum, M., Markovitch, S., and Rusakov, D. (2004).
Selective sampling for nearest neighbor classifiers.
Machine Learning, 54(2):125–152.
Pavlidis, T. (2008). Limitations of content-based image re-
trieval. Technical report, Stony Brook University.
Piras, L., Giacinto, G., and Paredes, R. (2012). Enhanc-
ing image retrieval by an exploration-exploitation ap-
proach. In Perner, P. ed., MLDM 2012, LNCS 7376,
pp 355–365. Springer.
Rao, Y., Mundur, P., and Yesha, Y. (2006). Fuzzy svm en-
sembles for relevance feedback in image retrieval. In
Sundaram et al. ed., CIVR 2006, LNCS 4071, pp 350–
359. Springer.
Rocchio, J. J. (1971). Relevance feedback in information re-
trieval. In Salton, G. ed., The SMART Retrieval System
- Experiments in Automatic Document Processing, pp
313–323. Prentice Hall, Englewood, Cliffs, New Jer-
sey.
Rui, Y., Huang, T. S., and Mehrotra, S. (1997). Content-
Based image retrieval with relevance feedback in
MARS. In International Conference on Image Pro-
cessing Proceedings, pp 815–818.
Sivic, J. and Zisserman, A. (2008). Efficient visual search
for objects in videos. Proceedings of the IEEE,
96(4):548 –566.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
188

Swain, M. J. and Ballard, D. H. (1991). Color indexing. In-
ternational Journal of Computer Vision, 7(1):11–32.
Thomee, B. and Lew, M. S. (2012). Interactive search in
image retrieval: a survey. IJMIR, 1(1):71–86.
Tong, S. and Chang, E. Y. (2001). Support vector machine
active learning for image retrieval. In ACM Multime-
dia, pp 107–118.
Tronci, R., Murgia, G., Pili, M., Piras, L., and Giacinto, G.
(2013). Imagehunter: A novel tool for relevance feed-
back in content based image retrieval. In Lai et al. ed.,
New Challenges in Distributed Information Filtering
and Retrieval, pp 53–70. Springer Berlin Heidelberg.
Wang, M., Yang, K., Hua, X.-S., and Zhang, H. (2010). To-
wards a relevant and diverse search of social images.
IEEE Transactions on Multimedia, 12(8):829–842.
Zhang, L., Lin, F., and Zhang, B. (2001). Support vector
machine learning for image retrieval. In ICIP 2001,
pp 721–724.
Zhou, X. S. and Huang, T. S. (2003). Relevance feedback in
image retrieval: A comprehensive review. Multimedia
Syst., 8(6):536–544.
User-drivenNearestNeighbourExplorationofImageArchives
189
