
Facial Expression Recognition based on EOG toward Emotion
Detection for Human-Robot Interaction
Aniana Cruz
1
, Diogo Garcia
1
, Gabriel Pires
1,3
and Urbano Nunes
1,2
1
Institute of Systems and Robotics, University of Coimbra, Coimbra, Portugal
2
Department of Electrical and Computer Engineering, University of Coimbra, Coimbra, Portugal
3
Department of Engineering, Polytechnic Institute of Tomar, Tomar, Portugal
Keywords: EOG Signal, Facial Expression, Avatar, Classification.
Abstract: The ability of an intelligent system to recognize the user’s emotional and mental states is of considerable
interest for human-robot interaction and human-machine interfaces. This paper describes an automatic
recognizer of the facial expression around the eyes and forehead based on electrooculographic (EOG)
signals. Six movements of the eyes, namely, up, down, right, left, blink and frown, are detected and
reproduced in an avatar, aiming to analyze how they can contribute for the characterization of facial
expression. The recognition algorithm extracts time and frequency domain features from EOG, which are
then classified in real-time by a multiclass LDA classifier. The offline and online classification results
showed a sensitivity around 92% and 85%, respectively.
1 INTRODUCTION
Emotion is a complex process that characterizes the
human feeling and it is associated with a specific
pattern of physiological activity (Schacter, 2009). It
is fundamental in human behaviour, since it has
influence in the personality, disposition, motivation
and interaction between people. Emotion can be
expressed through: facial expressions such as
surprise, fear, disgust, anger, happiness and sadness;
the sound of the voice; the body posture and the
arousal of the nervous system, for example, rapid
heartbeat and breathing and muscle tension (Ekman
and Friesen, 1975). Machine emotional intelligence,
i.e., the ability of an intelligent system to recognize
the user’s emotional state and interact accordingly,
is an interesting aspect that can improve the human-
machine interaction. This topic has received
increasing attention by the research community.
Ekman and Friesen proposed an universal facial
expression which is independent to human cultures
and origins. The first computer-based recognition
system of facial expression appeared later in 1990s
(Mase, 1991; Terzopoulus and Waters, 1993). Most
of these studies classify facial expression or vocal
emotion based on a single data modality, such as
static image or speech and video sequences (Black
and Yacoob, 1997; Bartlett et al., 1999; Nwe et al.,
2001; Cohen et al., 2003; Buenaposada et al., 2008;
Verma and Singh, 2011). Bimodal approaches,
combining the two modalities, image and speech,
were also proposed in (Huang et al., 1998; De Silva
and Ng, 2000; Emerich et al., 2009). Recognition of
hand gestures, body pose and body motion can
improve the robustness of emotion recognition
(Busso et al., 2004; Castellano et al., 2008; Metri et
al, 2011).
Image-based recognition of facial expressions is
very sensitive to illumination, image quality,
human's position and movements. Approaches based
on biosignals such as electromyography (EMG) and
electroencephalography (EEG) have been proposed
recently. In (Hamedi et al, 2011), a method based on
surface EMG (sEMG) is used to recognize five
different facial gestures (rest, smile, frown, rage, and
gesturing ‘notch’ by pulling up the eyebrows). In
(Koelstra and Patras, 2013) a multi-modal approach
combining facial expressions, recorded by a frontal
camera, with EEG signals was proposed for the
generation of affective tags. Electrooculography
(EOG) can also be used for detection of eye
movements, providing useful information to
characterize facial expressions. Although the EOG is
used in a variety of applications including clinical
and human machine interfaces (Barea et al., 2002;
Shayegh and Erfanian, 2006; Duchowski, 2007;
Banerjee et al., 2013), its use in emotion recognition
31
Cruz A., Garcia D., Pires G. and Nunes U..
Facial Expression Recognition based on EOG toward Emotion Detection for Human-Robot Interaction.
DOI: 10.5220/0005187200310037
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2015), pages 31-37
ISBN: 978-989-758-069-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

has been up to now not very significant.
Electrocardiography (ECG), galvanic skin response
(GSR) are some other sensors useful to characterize
emotion (Monajati et al., 2012; Kurniawan et al.,
2013). Biosignals provide proprioceptive
information that is impossible to detect with video/
speech/gesture, and therefore are a good
complement to these sensing systems. Moreover,
biosignal acquisition systems are affordable and can
measure simultaneously several types of biosignals.
Despite all these advantages, current biosignal
electrodes are still somehow intrusive,
uncomfortable, unaesthetic and difficult to setup,
which justifies their low widespread use. Yet, new
wearable devices with dry electrodes are emerging
(Barea et al., 2011).
This paper is focused on the detection of EOG
signals to recognize facial expressions from the eyes
and forehead region. The work herein described is
part of a system to detect discrete emotional/mental
states (Figure 1), which integrates EEG/EOG/ EMG
and GSR signals, for human-machine
interface/interaction purposes. The system will be
used to adapt robot behaviour according to human
emotional/mental state. In particular, the EOG
detector recognizes the movements up, down, right,
left, blink and frown, which are then reproduced in
an Avatar. Most of the researches related with the
eye’s movement do not analyze frown movements.
We introduce it here since it brings information for
detecting anger or surprise.
2 METHODOLOGY
Figure 2 shows a block diagram of the proposed
online classification system: 1) the raw EOG signals
from vertical and horizontal channels are filtered in
the band of interest; then 2) a sliding window is used
to automatically detect the onset of a movement; 3)
features are extracted; and finally 4) features are
classified in up, down, right, left, blink or frown. A
multiclass linear discriminant analysis (LDA) is
used to classify the 6 movements.
Figure 1: Overview of the system to detect discrete human
emotion/mental states for human-robot interface/inter-
action.
2.1 Data Acquisition
EOG measures the potential difference between the
cornea and the retina which varies from 0.4 to 1 mV
changing with eye’s orientation (Malmivuo and
Plonsey, 1995). EOG signals can be used to measure
vertical and horizontal eye movements by placing
the electrodes in specific positions (see Figure 3).
Four electrodes were mounted in a bipolar
configuration: left and right electrodes in the outer
canthus to detect horizontal movements (EOG
h
) and
below and above the eye to measure vertical
movements (EOG
v
). EOG signals were recorded
with a g.MOBIlab bioamplifier, at a sampling rate of
256 Hz.
Five healthy subjects with ages between 23 and
28 years old performed a training session which
consisted on the repetition of the six movements.
Participants seated in front of a computer, and
followed the movements of a moving ball that
moved in four directions: right, left, up and down.
The remaining movements were instructed by
messages displayed at the screen, namely "frown
forehead” and "blink". Each movement was
performed during 2 seconds with a rest interval of 2
seconds. A full sequence of movements is completed
in 24 seconds. A training dataset containing 40
repetitions of the same movement (40x6 data
Figure 2: Algorithm structure of the proposed EOG online detector.
Attention, fatigue,
workload, stress
detection
EEG/EMG/EOG/
GSR
Facial expression
detection
(eyes and forehead
region)
EOG/EMG
Facial expression
detection
(face and mouth
region)
EMG
Emotion
detection
interaction
Machine/
computer
Mental
state
detection
Robot
interface
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
32
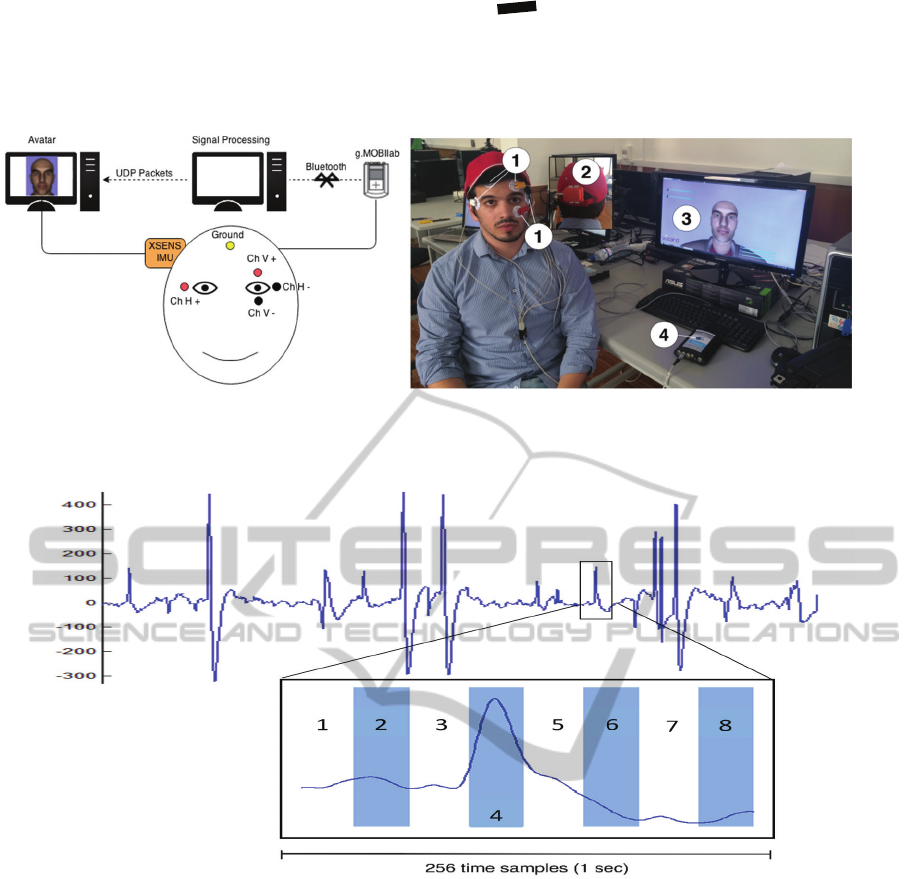
(a) (b)
Figure 3: a) Setup for data acquisition using the g.MOBIlab + system with vertical channel (Ch V+/-) and horizontal
channel (Ch H +/-). b) Picture of experimental setup with: (1) electrodes (2) IMU (3) avatar, (4) g.MOBIlab +.
Figure 4: Sliding window to detect up movement (vertical EOG signals).
segments), was used to train the classifier for online
operation. The computational time for obtaining the
classification models is less than 10 seconds.
2.2 Pre-processing and Onset
Movement Detection
EOG signals are often affected by noise coming
from the electrode-skin contact, muscular artifacts
and powerline. To reduce these interferences, EOG
signals were filtered in the band of interest using a
notch filter at 50 Hz and a 4th-order Butterworth
band-pass filter with lower cutoff frequency of 0.2
Hz and a higher cutoff frequency of 30 Hz. While in
the training session, the user is instructed to perform
a specific movement, during the free online
operation, the onset of each movement must be
automatically detected before being classified. This
is achieved by applying a sliding window approach,
dividing the EOG signal in non-overlapped
segments of 1-second. Each segment is sampled
yielding a data vector =
⋃
…⋃
composed of eight
subintervals, each with 32
samples (Figure 4). To adjust its position to capture
the entire movement, the absolute maximums are
computed for each subinterval. If the maximum
value of a subinterval (vertical and horizontal
channels) exceeds a given threshold (adjusted after
the training session of each individual) and it is more
than the other subinterval, the center of the window
is shifted to this subinterval. The rules to detect a
movement (Mov) are formally presented below.
=
,
>
∪
>
,
(1)
where
is the vertical threshold,
is the
horizontal threshold,
and
are the absolute
maximum of vertical and horizontal channel
FacialExpressionRecognitionbasedonEOGtowardEmotionDetectionforHuman-RobotInteraction
33

(a) (b)
Figure 5: Vertical (a) and horizontal (b) EOG signals for a sequence of six eye movements: blink, right movement, left
movement, frown, up movement and down movement, recorded during a training session.
maximum of vertical and horizontal channel
respectively calculated as:
=max
v
jϵ{1,…,NS} (2)
=maxh
jϵ{1,…,NS} (3)
=0.7×
1
max(|
v
|)
(4)
=0.8×
1
max(|h
|)
(5)
where NS=8 is the number of subintervals,
is
the number of vertical movements and
is the
number of horizontal movements performed during
training sessions. The vertical threshold (equation 4)
is 70% of the mean of the absolute maximum value
of the up and down eye movement recorded from
vertical channel. The horizontal threshold (equation
5) is 80% of the mean of the absolute maximum
value of the right and left eye movement recorded
from horizontal channel. The center of the window
is the subinterval with the maximum absolute value.
2.3 Feature Extraction
After the detection of the onset of a movement, a
feature extractor is applied to the segment of 256
samples. As we can see in Figure 5, when the
subject blinks his/her eyes, there is a higher positive
peak and a weaker negative peak in the vertical
channel. The same occurs when the subject frowns
his/her forehead, but with a smaller amplitude.
When the subject moves the eyes to the right, a large
positive peak and a small positive peak occur
respectively in the horizontal and the vertical
channel. The opposite effect appears when the
subject moves the eyes to the left. There is a positive
peak in the vertical channel when the subject moves
the eyes up and a negative peak when the subject
moves the eyes down. These time domain features
are extracted using the maximum (Max), minimum
(Min), total and partial average values. The total
average (MedT) is the mean of the epoch and the
two partial averages (MedP1 and MedP2) are
respectively the means of the segment taking into
account only the samples with amplitudes that are
higher and lower than a given threshold. The
thresholds were empirically set to +20 and -16, by
experimentation. For each segment X the time
domain features are computed as:
=max
(
)
(6)
=min
(
)
(7)
=
1
(8)
1=
1
∀
>20
(9)
2=
1
∀
<−16
(10)
where L is the length of the segment X, L
1
and L
2
are
respectively the number of time samples satisfying
>20 and
<−16. The frown movement is
also characterized by frequencies resulting from
muscular contraction in the forehead. Therefore,
features were also extracted in the frequency domain
through a relative power measure for the frequency
bands {10-15; 15-20; 20-25 and 25-30 Hz},
according to:
=100×
∑
jϵ{1,…,NB}
(11)
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
34

where RP
j
is the relative power for each frequency
band, NB=4 is the number of frequency bands,
is the power of band j, and
is the power from 10
to 30 Hz, i.e., the total power. The feature vector
(FV) used for classification has a dimension of 18,
corresponding to 9 features for each EOG channel:
=
[
1
2
1
2
] (12)
where the subindex v and h represent vertical and
horizontal channel respectively.
2.4 Classifier and Performance
Measures
EOG patterns representing each one of the 6 classes
are classified by a multiclass LDA (Duda et al.,
2000). LDA is a generative classifier that finds a
linear combination of features that separates the 6
classes. To evaluate the performance of the
classification, the following parameters were
computed: sensitivity (Sens), specificity (Spec) and
accuracy (Acc) (Zhu et al., 2010):
=
+
×100
(13)
=
+
×100
(14)
=
+
+++
×100
(15)
where TP is the true positive, TN is the true
negative, FN is the false negative and FP is the false
positive.
3 SYSTEM FRAMEWORK
In the current stage of the work, we used an avatar to
mimic (replicate) the movements of the user. The
virtual avatar was developed in Vizard
TM
software.
The 3D model of the head and expressions of the
avatar are designed on Maya Autodesk
TM
. After
importing the 3D models built on Maya to Vizard,
the expressions are represented through a mix of
different faces, reproducing the subject movements.
The avatar receives a trigger code via UDP/IP each
time a movement is recognized in real-time (the
number of movements was limited to a maximum of
one per second). A wired XSENS sensor IMU
(inertial measurement unit) is used to detect and
replicate the movements of the head/neck of the user
on the Avatar.
4 RESULTS AND DISCUSSION
The first step of the recognition system is the
detection of the onset of a movement through the
sliding window. False positive and false negative
rates of 4.9% and 15.4 % were obtained.
Table 1 shows the confusion matrix obtained for the
offline classification of the six movements using the
features in the time domain: maximum, minimum,
total and partial average values. The results reveal
that blink movement has the highest number of true
positives, followed by the down and right
movements. The greatest number of false positives
and false negatives appears in the down and frown
movements, respectively. Frown movement is
mainly confused by down movements. Table 2
shows the confusion matrix using the combination of
the features in time and frequency domains. Adding
the relative power feature increases the true positive
values of frown movement. Table 3 and 4 presents
the accuracy, specificity and sensitivity values using
the features in time domain and combining time and
frequency features, respectively. Analyzing the
results presented in Table 3 we observe that the
blink movement has the highest sensitivity detection.
On the other hand, the frown movement is the less
accurately detected. The use of relative band power
increases the sensitivity of the frown movement to
12% and the average sensitivity about 2%. All
movements have specificity values above 88%. The
average sensitivity, specificity and accuracy are
92.3, 98.5 and 97.4, respectively. From the five
participants, the three with the highest scores
completed also the online experiments. The
performance of online classification is presented in
Table 5. Subject 3 has the highest performance with
sensitivity close to 90%. These results reflect also
the false positive rate of the detection of
movements’ onset, thereby slightly decreasing the
overall classification performance. The sliding
window was adjusted using a subject-dependent
thresholds. We aim to improve the system in the
near future to include generic thresholds obtained
from a database of several subjects, thus improving
the robustness of the classification model.
Blinks give relevant information for user state
and emotion characterization, since activities that
need thought and attention causes a decrease on
blink frequency. Usually, greater blink rate indicates
lower attention and fatigue (Andreassi, 2000).
Frown movement is an expression that characterizes
emotions like anger or surprise. These movements
are accurately detected, thus the EOG signal can
provide important cues for detecting emotions like
FacialExpressionRecognitionbasedonEOGtowardEmotionDetectionforHuman-RobotInteraction
35
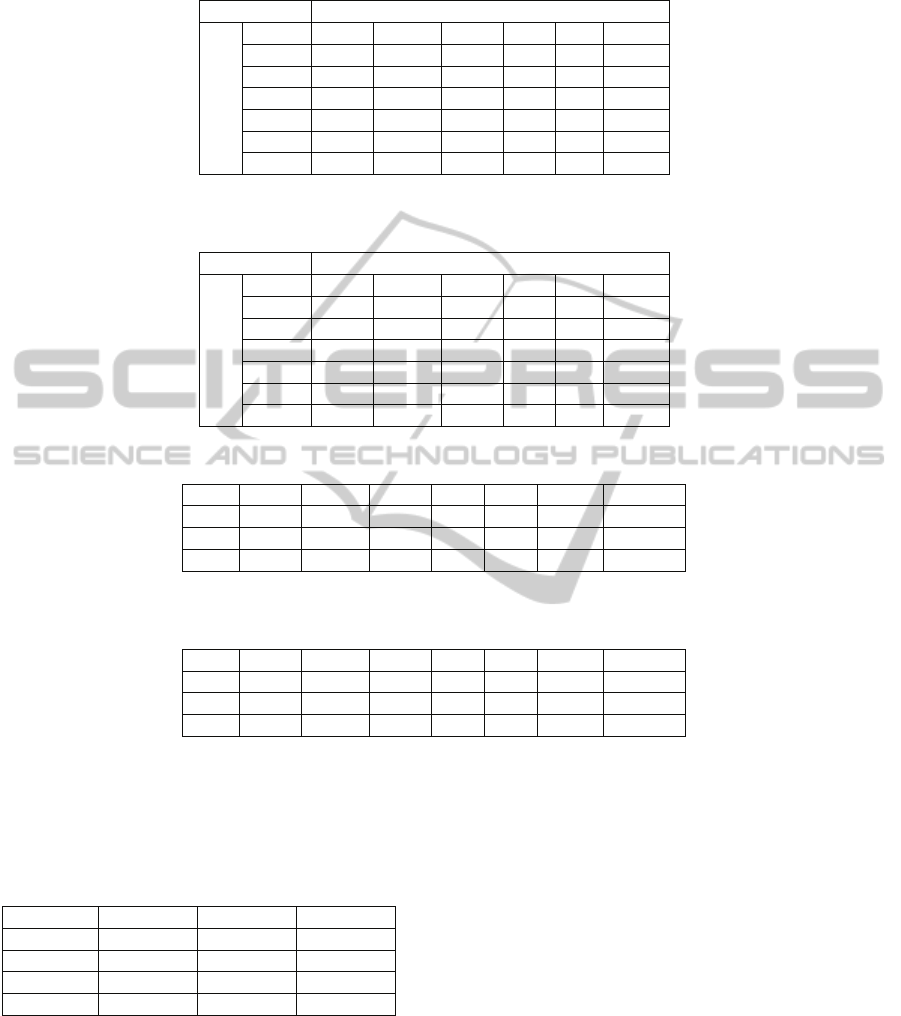
Table 1: Confusion matrix of the offline classification system using only the features in time domain: maximum, minimum,
and total and partial averages.
Movements
Automatic
Blink Frown Right Left Up Down
Blink 191 11 2 3 1 2
Frown 7 153 2 3 14 2
Right 0 3 190 1 1 0
Left 0 1 0 189 0 1
Up 1 13 1 4 175 5
Down 1 19 5 0 9 190
Table 2: Confusion matrix of the offline classification system using relative power features in addition to maximum,
minimum, and total and partial averages.
Movements
Automatic
Blink Frown Right Left Up Down
Blink 191 11 2 2 1 2
Frown 7 176 4 7 10 7
Right 0 4 192 1 1 0
Left 0 1 0 189 0 1
Up 1 5 1 1 176 7
Down 1 3 1 0 12 183
Table 3: Overall offline classification results for maximum, minimum, total and partial average values as features.
Blink Frown Right Left Up Down Average
Sens 95.5 76.5 95.0 94.5 87.5 95.0 90.7
Spec 98.1 97.2 99.5 98.9 97.6 96.6 98.1
Acc 97.7 93.8 98.8 98.9 95.9 96.3 96.9
Table 4: Overall offline classification results for maximum, minimum, total and partial average values and relative power as
features.
Blink Frown Right Left Up Down Average
Sens 95.5 88.0 96.0 94.5 88.0 91.5 92.3
Spec 98.2 96.5 99.4 99.8 98.5 98.3 98.5
Acc 97.8 95.1 98.8 98.9 96.8 97.2 97.4
like fatigue, anger or surprise. Moreover, vertical
and horizontal movements provide useful
information to detect stress.
Table 5: Online classification performance for each
subject.
Sens Spec Acc
Subject 1 86.9 97.5 98.0
Subject 2 77.7 97.5 97.9
Subject 3 88.1 98.8 98.9
Average 84.7 97.9 98.3
5 CONCLUSIONS
In this paper, six eye movements (up, down, right,
left, blink and frown) are classified from EOG
patterns and reproduced in an Avatar. This is an
integrated part of a system being developed toward
the recognition of human’s emotion for human-robot
interaction. Offline and online sensitivity of the
EOG classifier were around 92% and 85%,
respectively, which are promising results.
The next research steps will be the integration of
EMG for facial expressions like smile, open/close
mouth, and then the implementation of an emotion
recognizer obtained from the combination of all
detected facial expressions.
ACKNOWLEDGEMENTS
This work has been supported by the FCT project
"AMS-HMI2012 - RECI/EEI-AUT/0181/2012" and
project "ProjB-Diagnosis and Assisted Mobility -
Centro-07-ST24-FEDER-002028" with FEDER
funding, programs QREN and COMPETE.
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
36

REFERENCES
Andreassi, J. L., 2000. Psychophysiology: Human
Behavior and Physiological Response. Lawrence
Erlbaum Associates. London, 4
th
edition.
Banerjee, A., Datta, S., Pai, M., Konar, A., Tibarewala, D.
N., Janarthanan, R., 2013. Classifying Electro-
oculogram to Detect Directional Eye Movements.
International Conference on Computational
Intelligence: Modeling Techniques and Applications
(CIMTA), (10) 67–75.
Barea R., Boquete L., Mazo M., Lopez E., 2002. System
for assisted mobility using eye movements based on
electrooculography. IEEE Transactions on Neural
Systems and Rehabilitation Engineering, 10(4):209-
218.
Barea, R., Boquete, L., Rodriguez-Ascariz, J. M., Ortega,
S., López, E., 2011. Sensory System for Implementing
a Human-Computer Interface Based on
Electrooculography. Sensors, 11 (1), 310-328.
Bartlett, M. S., Hager, J. C., Ekman, P., Sejnowski, T. J.,
1999. Measuring facial expressions by computer
image analysis. Psychophysiology, 36(2):253–263.
Black, M. J., Yacoob, Y., 1997. Recognizing Facial
Expressions in Image Sequences Using Local
Parameterized Models of Image Motion. International
Journal of Computer Vision, 25(1), 23–48.
Buenaposada, J., M., Muñoz, E., Baumela, L., 2008.
Recognising facial expressions in video sequences.
Pattern Analysis and Applications, 11:101-116.
Busso C., Deng, Z., Yildirim S., Bulut, M., Lee, C. M.,
Kazemzadeh, A., Lee, S., Neumann, U., Narayanan S.,
2004. Analysis of Emotion Recognition using Facial
Expressions, Speech and Multimodal Information.
Proceedings of the 6th international conference on
Multimodal interfaces, 205-211.
Castellano, G., Kessous, L., Caridakis, G., 2008. Emotion
Recognition through Multiple Modalities: Face, Body
Gesture, Speech, Affect and Emotion in Human-
Computer Interaction, 92-103.
Cohen, I., Sebe, N., Garg, A., Chen, L., Huang, T.S.,
2003. Facial expression recognition from video
sequences: Temporal and static modeling. Computer
Vision Image Understand. 91: 160-187.
De Silva, L. C., Ng, P. C., 2000. Bimodal emotion
recognition, In: IEEE International Conference on
Automatic Face and Gesture Recognition, 332–335.
Duchowski, A., 2007. Eye Tracking Methodology: Theory
and Practice, Springer. 2
nd
edition.
Duda R. O., Hart, P. E., Stork, D., G., 2000. Pattern
Classification. John Wiley and Sons Ltd. 2
nd
edition.
Ekman, P., Friesen, W. V., 1975. Unmasking the face. A
guide to recognizing emotions from facial clues.
Englewood Cliffs, New Jersey: Prentice-Hall.
Emerich S., Lupu, E., Apatean, A., 2009. Emotions
recognition by speech and facial expressions analysis.
17th European Signal Processing Conference.
Hamedi, M., Rezazadeh, I. M., Firoozabadi M., 2011.
Facial Gesture Recognition Using Two-Channel Bio-
Sensors Configuration and Fuzzy Classifier: A Pilot
Study. International Conference on Electrical, Control
and Computer Engineering, 338-343.
Huang, T. S., Chen L. S., Tao, H., Miyasato, T., Nakatsu,
R., 1998. Bimodal Emotion Recognition by Man and
Machine. ATR Workshop on Virtual Communication
Environments.
Koelstra, S., Patras, I., 2013. Fusion of facial expressions
and EEG for implicit affective tagging. Image and
Vision Computing, 31(2) 164 –174.
Kurniawan, H., Maslov A. V., Pechenizkiy, M., 2013.
Stress detection from speech and Galvanic Skin
Response signals. International Symposium on
Computer-Based Medical Systems (CBMS), 209-214.
Malmivuo, J., Plonsey, R., 1995. Principles and
Applications of Bioelectric and Biomagnetic Fields.
New York, Oxford, Oxford University Press, Inc.
Mase, K., 1991. Recognition of facial expressions for
optical flow. IEICE Transactions, Special Issue on
Computer Vision and its Applications, E 74(10).
Metri, P., Ghorpade, J., Butalia, A., 2011. Facial Emotion
Recognition using Context Based Multimodal
Approach. International journal on interactive
multimedia and artificial intelligence, 2(1), 171-182.
Monajati, M., Abbasi, S. H., Shabaninia, F., Shamekhi, S.,
2012. Emotions States Recognition Based on
Physiological Parameters by Employing of Fuzzy-
Adaptive Resonance Theory. International Journal of
Intelligence Science, 2, 166-175.
Nwe, T. L., Wei, F. S., De Silva, L. C., 2001. Speech
based emotion classification. Electrical and Electronic
Technology, (1) 297–301.
Schacter, D. S., Gilbert, D. T., Wegner, D. M., 2009.
Psychology. New York: Worth.
Shayegh, F., Erfanian, A., 2006. Real–time ocular artifacts
suppression from EEG signals using an unsupervised
adaptive blind source separation. Engineering in
Medicine and Biology society, 28
th
Annual
International Conference of the IEEE, 5269-5272.
Terzopoulus, D., Waters, K., 1993. Analysis and synthesis
of facial image sequences using physical and
anatomical models. IEEE Trans. Pattern Analysis and
Machine Intelligence, 15(6):569–579.
Verma, G. K., Singh, B. K., 2011. Emotion Recognition
based on Texture Analysis of Facial Expression.
International Conference on Image Information
Processing, 1-6.
Zhu W., Zeng N., Wang N., 2010. Sensitivity, Specificity,
Accuracy, Associated Confidence Interval and ROC
Analysis with Practical SAS® Implementations.
NESUG proceedings: Health Care and Life Sciences,
Baltimore, Maryland.
FacialExpressionRecognitionbasedonEOGtowardEmotionDetectionforHuman-RobotInteraction
37
