
Defending Autonomous Agents Against Attacks in Multi-Agent Systems
Using Norms
Jan Kantert
1
, Sarah Edenhofer
2
, Sven Tomforde
2
, J¨org H¨ahner
2
and Christian M¨uller-Schloer
1
1
Institute of Systems Engineering, Leibniz University Hanover, Appelstr. 4, 30167 Hanover, Germany
2
Lehrstuhl f¨ur Organic Computing, Augsburg University, Eichleitnerstr. 30, 86159 Augsburg, Germany
Keywords:
Adaptive Control Loop, Multi-Agent-Systems, Trust, Norms, Desktop-Grid System.
Abstract:
The Trusted Desktop Grid (TDG) is a self-organised, agent-based organisation, where agents perform com-
putational tasks for others to increase their performance. In order to establish a fair distribution and provide
counter-measures against egoistic or malicious elements, technical trust is used. A fully self-organised ap-
proach can run into disturbed states such as a trust breakdown of the system that lead to unsatisfying sys-
tem performance although the majority of participants is still behaving well. We previously introduced an
additional system-wide control loop to detect and alleviate disturbed situations. Therefore, we describe an
Observer/Controller loop at system level that monitors the system status and intervenes if necessary. This
paper focuses on the controller part which instantiates norms as reaction to observed suspicious situations. We
demonstrate the benefit of our approach within a Repast-based simulation of the TDG. Therein, the impact of
disturbances on the system performance is decreased significantly and the time to recover is shortened.
1 INTRODUCTION
Self-organised volunteer computing shares compu-
ting resources of a potentially large set of participants
in a distributed manner. Agents can utilise resources
of others to get their jobs computed as fast as possible
and thereby decrease their processing time. Typically,
such a system is realised as open system – meaning
that everyone is free to join if following the basic pro-
tocol.
Since openness attracts egoistic or even mali-
cious elements, counter-measures are needed to iso-
late these unwanted elements and provide a perfor-
mant platform for normal and benevolent users. In
previous work, we demonstrated that technical trust
is a perfect instrument to achieve this goal – lead-
ing to a Trusted Desktop Grid (TDG) (Bernard et al.,
2010). However, a fully self-organised solution has
drawbacks that become visible in disturbed situations.
For instance, an orchestrated joining of malicious ele-
ments can cause a trust breakdownthat also affects the
trust relations of normal agents (Klejnowski, 2014).
In this paper, we present a novel concept to han-
dle these disturbed situations – once they were de-
tected. Since the effects are not visible for isolated
agents, a system-wide management has to be estab-
lished. Previously, we proposed to utilise the Ob-
server/Controller concept as introduced by the Or-
ganic Computing initiative (Tomforde et al., 2011) as
basis for such a system-wide control and presented an
approach to detect such situations. Since agents are
autonomous and we cannot control their implemen-
tations, a guided self-organisation is aimed for. This
is achieved by publishing and controlling norms that
have to be followed by agents at runtime. As a result,
we establish a system-wide control loop that issues
norms in disturbed situations and thereby manages the
overall behaviour.
The remainder of this paper is organised as fol-
lows: Section 2 describes the TDG as application sce-
nario with a special focus on the agents’ goals, the
system goal, and the trust mechanism. It also explains
the trust breakdown that serves as motivation of this
work in more detail. Afterwards, Section 3 introduces
the norm-based system control with its observer and
controller componentsas well as the system under ob-
servation and control. Section 5 presents our novel
concepts and details the approach. In addition, Sec-
tion 4 puts the approach into the context of related and
preliminary work. This is followed by a simulation-
based evaluation in Section 6 that demonstrates the
benefit of our approach with respect to decreasing
the impact of disturbances on the system performance
and the time to recover. Section 7 summarises the pa-
149
Kantert J., Edenhofer S., Tomforde S., Hähner J. and Müller-Schloer C..
Defending Autonomous Agents Against Attacks in Multi-Agent Systems Using Norms.
DOI: 10.5220/0005202101490156
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 149-156
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

per and gives an outlook to current and future work.
2 APPLICATION SCENARIO
In this work, we investigate and improve open dis-
tributed systems. To analyse such systems, we model
nodes as agents and run a multi-agent system in simu-
lation. Our application scenario is an open distributed
Desktop Grid System. Every agent works for a user
and periodically gets a job, which contains multiple
parallelisable work units. It aims to get all work units
done as fast as possible and it accomplishes this by
requesting other agents to work for it. Since we con-
sider an open system, agents are autonomous and can
join or leave at any time.
2.1 Agent Goal
The performance is measured by the speedup σ. In
Equation (1), τ
self
is the time it would take an agent to
calculate a job with multiple work units without any
cooperation. τ
distributed
represents the time it took to
calculate all work units of one job with cooperation
of other workers including all communication times.
Speedup can only be determined after the result of the
last work unit has been returned.
σ ≔
τ
self
τ
distributed
(1)
If no cooperation partners can be found, agents need
to calculate their own work units and achieve a
speedup value equal to one (i.e. no speedup at all).
In general, agents behave selfishly and only cooper-
ate if they can expect an advantage. They have to
decide which agent they want to give their work to
and for which agents they want to work themselves.
We do not control the agent implementation, so they
may be uncooperative or even malicious. In contrast
to other work from state of the art, we do not assume
the benevolence of the agents (Wang and Vassileva,
2004). Such an open system is vulnerable to different
kinds of attacks. For instance, a Freerider can simply
refuse to work for other agents and gain an advantage
at the expense of cooperative agents.
2.2 System Goal
The global goal is to enable agents, which act ac-
cording to the system rules, to achieve the best pos-
sible speedup. We measure the global achievement
og the goal either by the average speedup of the well-
behaving agents or by the number of cooperation (4)
combined with the average submit-to-work-ratio of
all agents (5). submit(A
i
, A
j
) represents the number of
work units, which agent A
i
successfully calculated for
agent A
j
. Accordingly, work(A
i
, A
j
) counts the work
units A
i
submitted to A
j
. work(A
i
) is the number of
work units A
i
submitted to all other agents (3). Ac-
cordingly, submit(A
j
) shows the count of work units
an agent calculated for other agents (2).
submit(A
i
) ≔
n
∑
j=1, j,i
submit(A
i
, A
j
) (2)
work(A
i
) ≔
n
∑
j=1, j,i
work(A
i
, A
j
) (3)
cooperation ≔
n
∑
i=1
work(A
i
) (4)
fairness ≔
n
∑
i=1
min
submit(A
i
)
work(A
i
)
,
work(A
i
)
submit(A
i
)
n
(5)
The system solves a distributed resource allocation
problem. Since work units can be calculated faster
when agents cooperate, we reward and maximise co-
operation. Additionally, a high fairness value en-
sures equal resource distribution (cf. (Jarn, 1996;
Demers et al., 1989; Bennett and Zhang, 1996)).
2.3 Trust Metric
To overcome the problems of an open system, where
no particular behaviour can be assumed, we intro-
duced a trust metric. Agents receive ratings for all
their actions from their particular interaction part-
ners. This allows us to make an estimation about
the general behaviour of an agent based on its pre-
vious actions. In our system, agents receive a good
rating if they work for other agents and a bad rat-
ing if they reject or cancel work requests. As a
result, we can isolate malevolent agents and main-
tain a good system utility in most cases. We call
this system a Trusted Desktop Grid (Bernard et al.,
2010) (Klejnowski, 2014).
An agent has multiple ratings with a value be-
tween −1 and 1 (6). The amount of ratings k is lim-
ited to implement oblivion. The global average over
all ratings for a single agent is called the reputation
ρ
i
(7).
ratings
i
∈ [−1, 1]
k
(6)
ρ
i
≔
k
∑
j=1
ratings
ij
k
(7)
2.4 Agent Types
We consider the following agent types in our system:
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
150
• Adaptive Agents - These agents are cooperative.
They work for other agents who earned good rep-
utation in the system. How high the reputation
value has to be generally depends on the estimated
current system load and how much the queue of
the agent is filled up.
• Freerider - Such agents do not work for other
agents and reject all work requests. However,they
ask other agents to work for them. This increases
the overall system load and decreases the utility
for well-behaving agents.
• Egoists - These agents only pretend to work for
other agents. They accept all work requests but
return fake results to other agents, which wastes
the time of other agents. If results are not vali-
dated, this may lead to wrong results. Otherwise,
it lowers the utility of the system.
We simulate an attack by adding new malicious
agents to the system at start-up or during runtime.
Since these malicious agents distribute their work, the
speedup for well-behaving agents decreases. How-
ever, those agents get bad ratings such that their rep-
utation in the system is reduced. At this point, other
agents stop to cooperate with these isolated agents.
Thus, we try to minimise the impact and duration of
these disturbances, but they still decrease the system
utility (Klejnowski, 2014).
2.5 Trust Breakdown
One special problem of attacks by Freeriders is that
they create a large amount of bad ratings in the sys-
tem. In general, it is easy for agents to detect Freerid-
ers, because they do not accept any work. When
agents detect a Freerider, they refuse to work for this
agent. But the Freerider still tries to distribute its
work and gives bad ratings to other agents for not
cooperating. This leads to a Trust Breakdown, dur-
ing which eventhe reputation of well-behaving agents
decreases. As a result, well-behaving agents can
no longer differentiate between malicious and other
well-behaving agents allowing Freeriders to exploit
all agents. In total, the average Speedup decreases
for all agents. Usually, a significant period is needed
to restore normal system behaviour by isolating all
Freeriders (Stegh¨ofer et al., 2010).
3 NORM-BASED SYSTEM
CONTROL
In our Trusted Desktop Grid (Bernard et al., 2010)
(TDG), different attacks by malevolent agents can
Norm Manager
Agent A
Agent B
Agent C
Norm set
Agent E
Agent D
Observationmodel
Change norms
Distribute
norms
Collect data
on agents
Agent A
Agent B
Agent C
Agent
E
Agent D
Ob
se
rv
at
io
nm
od
el
Norm set
Change norms
Observer Controller
Situation
Description
Detect
situation
SuOC
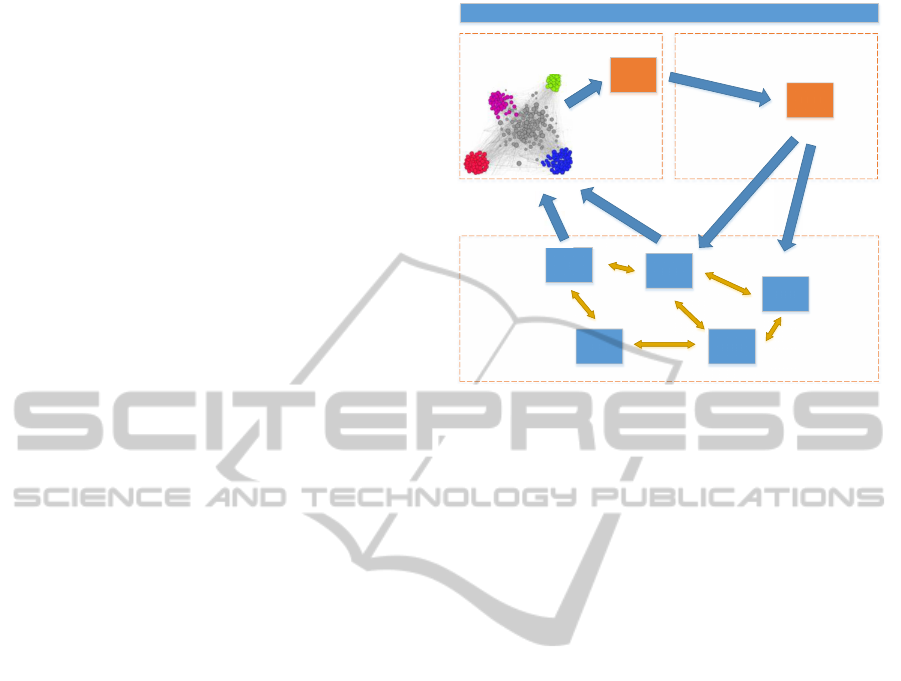
Figure 1: System overview.
occur (for instance, the aforementioned Trust Break-
down). We implemented various counter and security
measures to maintain a good utility for well-behaving
agents. However, most of these measures appear with
some attached costs. Although we do not benefit from
those mechanisms under normal operations, they are
essential under attack or at least lead to a significantly
faster recovery from attacks (Kantert et al., 2014b).
Additionally, we can configure our reputation sys-
tem and change the effect of ratings. This may in-
crease or decrease robustness, but it also influences
how fast new agents are integrated into the system.
Giving larger incentives leads to a faster system start-
up and a better speedup when well-behaving agents
join the system. However, it also gets easier to exploit
the system for malevolent agents.
In the TDG, a variety of different parameters exist
which influence the system behaviour. They must be
set before system start. For example, they enable or
disable security measures or change the influence of
a rating to the reputation system. Some settings result
in a better speedup when no attacks occur, but lead
to a higher impact on the performance in case of the
system being under attack. There is no global optimal
value for most of these scenarios. The ideal value or
setting depends on the current situation.
To obtain the best overall performance, we need to
change these parameters and settings during runtime
according to the current situation. For this, a proper
system state detection is a prerequisite. However, we
cannot detect global system states like Trust Break-
down from a local viewpoint of an agent. It is also
not possible to influence agents directly since they are
autonomous. Therefore, there needs to be a higher-
level instance which can detect the current system
DefendingAutonomousAgentsAgainstAttacksinMulti-AgentSystemsUsingNorms
151

state with an option to indirectly influence all agents
in the system. We call this higher-levelinstance Norm
Manager (NM).
In Fig. 1, we show our concept of the
Norm Manager (NM), which uses the common Ob-
server/Controller pattern (Tomforde et al., 2011). To
detect the current system state, the observer monitors
work relations of all agents. For this purpose, it cre-
ates a work graph with agents as nodes and edges
between agents which have cooperated in the mon-
itored period. The intensity of the cooperation be-
tween two agents determines the weight of the edge
connecting them. Additionally, the observer creates a
trust graph with agents as nodes and trust relations as
edges. Trust relations between agents can be obtained
from the reputation system.
Since we cannot see the internals or implementa-
tions of agents, we need to observe them from the out-
side. We could monitor interactions between agents,
but this may lead to a bottleneck in larger systems.
However, it is easy to monitor the actions indirectly:
We can observe the reputation system and use the ra-
tings which agents give their partners after every in-
teraction. When we collect those ratings, we can build
a trust-graph. Multiple ratings will be merged using
an arithmetic mean.
We evaluated the effect of attacks on different
metrics. Based on those measurements, we clustered
and classified groups of agents based on their be-
haviour (Kantert et al., 2014b). Using this informa-
tion, we create a situation description which is can be
used by the controller to guide the system. In this pa-
per, we focus on the controller side.
4 RELATED AND PREVIOUS
WORK
4.1 Desktop Grid and Trust
Our application scenario is a Desktop Grid Sys-
tem. These systems are used to share resources
between multiple administrative authorities. The
ShareGrid Project in Northern Italy is an exam-
ple for a peer-to-peer-based system (Anglano et al.,
2008). A second approach is the Organic Grid, which
is peer-to-peer-based with decentralised schedul-
ing (Chakravarti et al., 2004). Compared to our sys-
tem, these approaches assume that there are no mali-
cious parties involved and every node behaves well.
Another implementation with a central tracker is the
Berkeley Open Infrastructure for Network Computing
Project (BOINC) (Anderson and Fedak, 2006).
We model our grid nodes as agents. Agents have
a local goal which differs from the global system
goal (Rosenschein and Zlotkin, 1994). We consider
agents as black boxes. This means, we cannot ob-
serve the internal state. Thus, their actions and be-
haviour cannot be predicted (Hewitt, 1991). Our TDG
supports Bag-of-Tasks applications (Anglano et al.,
2006).
A classification of Desktop Grid Systems can be
found in Choi et al. (2007). A taxonomy can be found
in Choi et al. (2008). It is highlighted that there has to
be some mechanism to detect failures and malicious
behaviour in large-scale systems. Nodes cannot be
expected to be unselfish and well-behaving.
In contrast to other state-of-the-art works,
we do not assume the benevolence of the
agents (Wang and Vassileva, 2004). To cope with this
information uncertainty, we introduced a trust metric.
A general overview about trust in Multi-Agent
Systems can be found in Castelfranchi and Falcone
(2010). Another implementation of trust in a Desktop
Grid System was evaluated in Domingues et al.
(2007).
4.2 Norms
Explicit norms are similar to laws and can be ex-
pressed in deontic logic and argumentation. Individ-
uals can reason based on these norms. Since there
are multiple actions available, they may use addi-
tional factors or preferences (Sartor, 2005). Other
approaches use Defeasible logic (DL) to efficiently
model (Nute, 1994) and reason (Nute, 1988) about
norms. They separate facts and rules, which can be
strict rules, defeasible rules and exceptions from de-
feasible rules (called defeaters). To resolve conflicts
between two rules reasoning about the same action,
priorities can be specified (Nute, 2003). All reason-
ing can be done in linear time and is stable even when
norms are not consistent (Billington, 1993).
We base our norm format on Urzic˘a and Gratie
(2013). The authors developed a model for repre-
senting norms using context-awarepolicies with sanc-
tions. They take reputation into consideration when
making decisions based on norms. We use a con-
ditional norm structure as described in Balke et al.
(2013). Most of our norms can be characterised
as “prescriptions” based on von Wright (1963), be-
cause they regulate actions. Our norms are gen-
erated by a central elected component representing
all agents which classifies them as a “r-norm” ac-
cording to Tuomela and Bonnevier-Tuomela (1995).
By using norms, our agents can reach agree-
ments (Tuomela and Bonnevier-Tuomela, 1995) and
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
152

express commitments (Singh, 1999). However, the
agents can still violate commitments and risk a
sanction. Thereby, the agents stay autonomous.
Hollander and Wu (2011) present a norm lifecycle in-
cluding norm creation, enforcement, and adaption.
4.3 Normative Multi-Agent Systems
This work is part of wider research in the area of
norms in multi-agent systems. However, we fo-
cus more on improving system performance by us-
ing norms than researching the characteristics of
norms (Singh, 1999). Our scenario is similar to man-
agement of common pool resources. According to
game theory, this leads to a “tragedy of the com-
mons” (Hardin, 1968). However, Ostrom (1990) ob-
served cases were this did not happen. She pre-
sented eight design principles for successful self-
management of decentralised institutions. Pitt et al.
(2011) adapted these to normative Multi-Agent Sys-
tems.
Normative Multi-Agent Systems are used in mul-
tiple fields: e.g. Governatori and Rotolo (2008) focus
on so-called policy-based intentions in the domain of
business process design. Agents plan consecutive ac-
tions based on obligations, intentions, beliefs, and de-
sires. Based on DL, social agents can reason about
norms and intentions.
Artikis and Pitt (2009) present a generic approach
to form organisations using norms. They assign a role
to agents in a normative system. This system defines
a goal, a process to reach the goal, required skills, and
policies constraining the process. Agents directly or
indirectly commit for certain actions using a prede-
fined protocol. Agents may join or form an organisa-
tion with additional rules.
The normchange definition describes attributes,
which are required for Normative Multi-Agent Sys-
tems (Boella et al., 2009). Ten guidelines for imple-
mentation of norms to MAS are given. We follow
those rules in our system.
When norms are involved, agents need to make
decisions based on these norms. Conte et al. (1999)
argue that agents have to be able to violate norms to
maintain autonomy. However, the utility of certain
actions may be lower due to sanctions. We did some
previous work, presented in (Kantert et al., 2014a).
Normative Multi-Agent Systems can
be classified according to five cate-
gories (Savarimuthu and Cranefield, 2011): Norm
creation, norm identification, norm spreading, norm
enforcement, and network topology. We use a
leadership mechanism for norm creation and norm
spreading. For norm identification we use data
mining and machine learning. Our network topology
is static. For norm enforcement, we use sanctioning
and reputation.
5 APPROACH
In previous work, we focused on detecting attacks
during runtime in the observer part of a novel higher
level Norm Manager (Kantert et al., 2014b). Using
this knowledge, we want the controller part of our NM
to change norms in the TDG (see Figure 1).
In this paper, we focus on the controller com-
ponent. The controller is responsible for guid-
ing the overall system behaviour by applying
norms. Such a norm contains a rule and a sanc-
tion (Urzic˘a and Gratie, 2013). Agents are still au-
tonomous and can violate norms with the risk of sanc-
tioning.
Based on the information obtained by the ob-
server, the controller decides whether the system
norms need to be changed. Norms cannot directly
influence agents but modify their actions. To be
more specific, norms can impose sanctions or of-
fer incentives to actions. To defend against attacks,
we can increase sanctions for certain actions under
some conditions or we can allow agents to perform
security measures, which lead to sanctioning other-
wise (Balke et al., 2013). Certainly, changed sanc-
tions of incentives only apply to actions which were
taken after the change.
To counter attacks of malicious agents the con-
troller utilizes various counter measures: change or
create norms; issue incentives or add sanctions. In
Table 1, the default norms of our TDG are shown.
Agents get positive reputation when they finished the
work for other agents. If they reject work they get
a bad rating, unless the reputation of the requesting
agent A
s
is below α.
When an agent enters the system it gets an initial
reputation Ψ. To facilitate integration into the system,
Ψ is greater 0. However, malicious agents can use
this initial trust to exploit other agents. Especially in
sibling attacks, where agents have multiple identities,
this becomes a big issue. Unfortunately, Ψ > 0 is also
needed to efficiently integrate well-behaving agents.
Fortunately, the observer can detect such attacks,
so, the controller can react based on that knowledge.
In our approach, the controller changes α in Norm 1
to a value α > Ψ (see Table 1).
We expect a decrease in the impact of attacks by
Freeriders and Egoists since they will no longer be
able to cause Trust Breakdown with their initial rep-
utation. This effect can be measured by the time be-
DefendingAutonomousAgentsAgainstAttacksinMulti-AgentSystemsUsingNorms
153
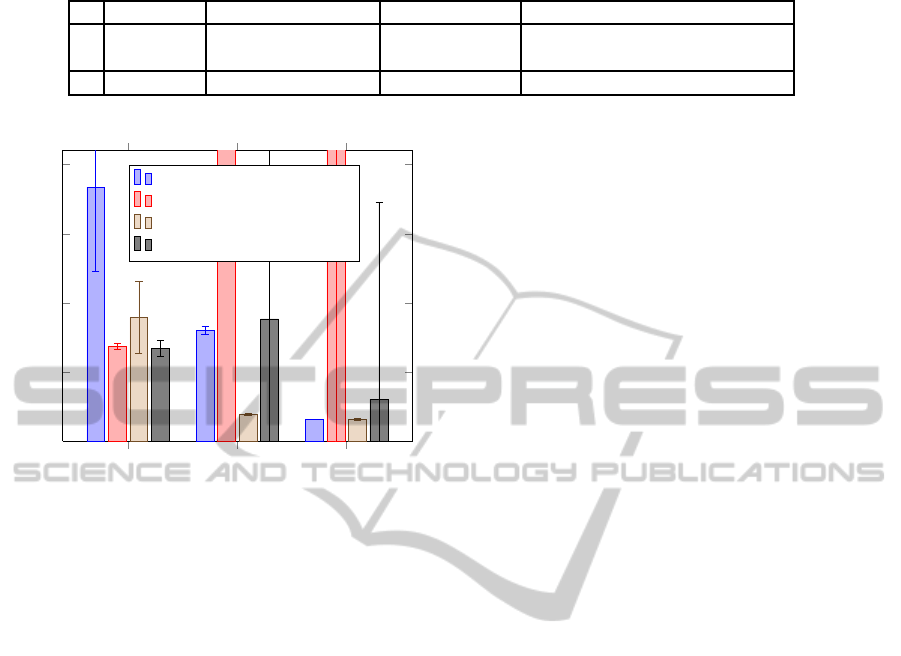
Table 1: Simplified norms for Worker Component in Trusted Desktop Grid.
Evaluator Action Context Sanction/Incentive
1 Worker RejectJob(A
w
, A
s
) T(A
w
, A
s
) > α T(A
s
, A
w
) -= Penalty
reject
T(A
w
, A
s
) ≤ α -
2 Worker ReturnJob(A
w
, A
s
) T(A
s
, A
w
) += Incentive
workDone
Adaptive Agents Freeriders Egoists
0
0.5
1
1.5
2
·10
4
Duration [ticks]
Low load with Norm
Low load without Norm
Normal load with Norm
Normal load without Norm
Figure 2: Duration of isolation/integration per agent group.
tween attack start and the point where all attackers
are isolated. We want to minimize this duration of
isolation. As our approach also affects well-behaving
agents, we also measure the increase of duration to
integrate them into the system.
6 EVALUATION AND
DISCUSSION
We consider attacks by Freeriders and Egoists and
evaluate both attacks by adding each 100 attacker
agents to a system of 200 Adaptive Agents. To mea-
sure the effect on well-behaving agents we repeat the
experiment with 100 Adaptive Agents entering the
system. The described norm change (see Section 5)
is performed at the beginning of the attack. Addi-
tionally, we run a reference experiment without norm
change for all agent types. Since isolation and inte-
gration of agents is slower during low load situations,
we added this as a scenario. Every experiment is re-
peated one-thousand times - resulting in 12.000 ex-
periments.
After the attack starts at τ
start
, we periodically cal-
culate the speedup σ (defined in Equation (1)) for
the attacking agents. τ
end,isolation
is defined to be the
smallest value with τ
end
> τ
start
∧ σ ≤ 1 (8). The du-
ration of isolation δ
isolation
is then determined as the
difference of τ
end
and τ
start
(9).
τ
end,isolation
≔ min{τ : τ > τ
start
∧ σ
τ
≤ 1} (8)
δ
isolation
≔ τ
end,isolation
− τ
start
(9)
For Adaptive Agents, we similarly calculate the
duration of integration δ
integration
(11). In a reference
experiment without norm change, we determine the
final speedup after integration σ
ref
. τ
end,integration
is
then defined to be the first time after attack where
σ ≥ σ
ref
(10).
τ
end,integration
≔ min{τ : τ > τ
start
∧ σ
τ
≥ σ
ref
} (10)
δ
integration
≔ τ
end,integration
− τ
start
(11)
In Figure 2, we present our results for three agent
types. For Freeriders and Egoists, the graph shows
δ
isolation
. In contrast, for Adaptive Agents, it illus-
trates δ
integration
. Full results with standard deviation
are listed in Table 2.
The results show that isolation of malicious agents
greatly improved when norms were changed, espe-
cially, in low load situations. For Freeriders the dura-
tion decreased by 78% under normal load. Under low
load, Freeriders were not fully isolated before. How-
ever, this changed with our approach: The system did
properlyisolate the attackers in all experiments. Since
isolation did not work in the reference case we limited
the length of that experiment. Therefore, the value for
low load without norms in Table 2 has no variance at
all and the relative gain cannot be calculated.
Our approach is very effective when dealing with
Egoists. With changed norms during attack they get
isolated after calculating their first job (duration of a
job is 1600 ticks). Without the change they did not
get isolated in most cases under low load and it took
about twice as long under normal load.
However, well-behaving agents are also affected
by the norm change: Adaptive Agents need 33%
longer under normal load and 169% longer under low
load. Integration still worked in all experiments and
can be considered stable.
Our results show that changing norms reduces the
impact of attacks by Freeriders and Egoists. How-
ever, this change cannot become the default because
it also affects the integration of well-behaving agents.
Nevertheless, by using our NM we can change norms
when the observer detects an attack by Freeriders or
Egoists.
Critical to the success of this method is fast detec-
tion of such attacks. After isolation of the attackers
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
154

Table 2: Duration of isolation/integration per agent group.
Agent
Low Load
without Norm
Normal Load
without Norm
Low Load
with Norm
Normal Load
with Norm
Adaptive Agents 6837.1±228.06 6722.1±568.06 18375.3±6098.97 8945.7±2585.81
Freerider 145000±0 8841.6±17597.08 8037.9±275.77 1930.8±57.37
Egoists 41178.4±64102.20 3034.1±14268.11 1600±0 1609.3±62.47
the norm changes can be reversed since isolation of
those two groups is permanent remains the TDG. Iso-
lation is performed using Trust and Reputation mech-
anism of the TDG. We chose this approach to keep
maximal autonomy for the agents.
Our implementation is currently limited to sys-
tems below some 50k agents since our graph metrics
used in the observer to create the situation description
have quadratic runtime. However, we plan to enlarge
this limit by distributing the NM and using algorithms
with better runtime.
Currently, the NM poses a single point of failure
for norm creation and changes. However, norms are
not crucial to the system since the TDG can run with-
out them. If this happens agents can simple elect a
new NM. This can be referred to as non-critical com-
plexity (Schmeck et al., 2010). Nevertheless, we plan
to add some redundancy here and want to implement
a more distributed approach with multiple NMs.
7 CONCLUSION AND FUTURE
WORK
This paper presented a novel concept to manage
an open, self-organised, and trust-based agent com-
munity by utilising norms. As application sce-
nario, we investigated a Trusted Desktop Grid sys-
tem, where agents can share their computation re-
sources in order to increase their performance. We in-
troduced a system-wide control loop that follows Or-
ganic Computing’s generic Observer/Controller con-
cept; this loop is responsible for detecting and al-
leviating disturbed system states. Thereby, this pa-
per focused on the controller part which instanti-
ates norms as reaction to observed suspicious situa-
tions. Our simulation-based evaluation demonstrates
that this system-wide control loop is able to counter
disturbed situations such as the trust breakdown. Us-
ing our approach, the impact of the disturbances can
be decreased significantly and the time to recover in
the case of failures is shortened dramatically.
Current and future work deals with questions
closely related to issuing norms. For instance, an au-
tomatic generation of new norms that can be instan-
tiated to counter previously unknown situations is of
interest. This will be coupled with an online learn-
ing component that estimates the achieved impact of
the applied norms and, therefore, improves the per-
formance of this control loop at runtime. Finally,
a combination with a self-organised surveillance of
norm compliance in combination with a self-managed
sanctioning mechanism will be applied to the system
to complete the control loop and combine distributed
and centralised elements.
REFERENCES
Anderson, D. and Fedak, G. (2006). The Computational and
Storage Potential of Volunteer Computing. In Proc. of
CCGRID 2006, pages 73–80. IEEE.
Anglano, C., Brevik, J., Canonico, M., Nurmi, D., and Wol-
ski, R. (2006). Fault-aware Scheduling for Bag-of-
Tasks Applications on Desktop Grids. In Proc. of
GRID 2006, pages 56–63. IEEE.
Anglano, C., Canonico, M., Guazzone, M., Botta, M., Ra-
bellino, S., Arena, S., and Girardi, G. (2008). Peer-to-
Peer Desktop Grids in the Real World: The ShareGrid
Project. Proc. of CCGrid 2008, pages 609–614.
Artikis, A. and Pitt, J. (2009). Specifying Open Agent
Systems: A Survey. In Artikis, A., Picard, G., and
Vercouter, L., editors, Engineering Societies in the
Agents World IX, volume 5485 of LNCS, pages 29–
45. Springer.
Balke, T. et al. (2013). Norms in MAS: Definitions and
Related Concepts. In Normative Multi-Agent Sys-
tems, volume 4 of Dagstuhl Follow-Ups, pages 1–31.
Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik.
Bennett, J. and Zhang, H. (1996). WF2Q: Worst-case Fair
Weighted Fair Queueing. In INFOCOM ’96. Fifteenth
Annual Joint Conference of the IEEE Computer So-
cieties. Networking the Next Generation. Proceedings
IEEE, volume 1, pages 120–128.
Bernard, Y., Klejnowski, L., H¨ahner, J., and M¨uller-Schloer,
C. (2010). Towards Trust in Desktop Grid Systems.
Proc. of CCGrid 2010, pages 637–642.
Billington, D. (1993). Defeasible Logic is Stable. Journal
of Logic and Computation, 3(4):379–400.
Boella, G., Pigozzi, G., and van der Torre, L. (2009). Nor-
mative Systems in Computer Science - Ten Guidelines
for Normative Multiagent Systems. In Boella, G.,
Noriega, P., Pigozzi, G., and Verhagen, H., editors,
Normative Multi-Agent Systems, number 09121 in
Dagstuhl Seminar Proceedings, Dagstuhl, Germany.
Schloss Dagstuhl - Leibniz-Zentrum fuer Informatik,
Germany.
DefendingAutonomousAgentsAgainstAttacksinMulti-AgentSystemsUsingNorms
155

Castelfranchi, C. and Falcone, R. (2010). Trust Theory:
A Socio-Cognitive and Computational Model, vol-
ume 18. John Wiley & Sons.
Chakravarti, A. J., Baumgartner, G., and Lauria, M. (2004).
Application-Specific Scheduling for the Organic Grid.
In Proc. of GRID 2004 Workshops, pages 146–155,
Washington, DC, USA. IEEE.
Choi, S., Buyya, R., Kim, H., and Byun, E. (2008). A
Taxonomy of Desktop Grids and its Mapping to State
of the Art Systems. Technical report, Grid Compu-
ting and Dist. Sys. Laboratory, The University of Mel-
bourne.
Choi, S., Kim, H., Byun, E., Baik, M., Kim, S., Park, C.,
and Hwang, C.(2007). Characterizing and Classifying
Desktop Grid. In Proc. of CCGRID 2007, pages 743–
748.
Conte, R., Castelfranchi, C., and Dignum, F. (1999). Au-
tonomous Norm Acceptance. In M¨uller, J., Rao, A.,
and Singh, M., editors, Intelligent Agents V: Agents
Theories, Architectures, and Languages, volume 1555
of LNCS, pages 99–112. Springer.
Demers, A., Keshav, S., and Shenker, S. (1989). Analy-
sis and Simulation of a Fair Queueing Algorithm. In
Symposium Proceedings on Communications Archi-
tectures & Protocols, SIGCOMM ’89, pages 1–12,
New York, NY, USA. ACM.
Domingues, P., Sousa, B., and Moura Silva, L. (2007).
Sabotage-tolerance and Trustmanagement in Desktop
Grid Computing. In Future Gener. Comput. Syst. 23,
7, pages 904–912.
Governatori, G. and Rotolo, A. (2008). BIO Logical
Agents: Norms, Beliefs, Intentions in Defeasible
Logic. Autonomous Agents and Multi-Agent Systems,
17(1):36–69.
Hardin, G. (1968). The Tragedy of the Commons. Science,
162(3859):1243–1248.
Hewitt, C. (1991). Open Information Systems Semantics
for Distributed Artificial Intelligence. Artificial intel-
ligence, 47(1):79–106.
Hollander, C. D. and Wu, A. S. (2011). The Current State of
Normative Agent-Based Systems. Journal of Artificial
Societies and Social Simulation, 14(2):6.
Jarn, R. e. a. (1996). Fairness, Call Establishment La-
tency and Other Performance Metrics. ATM-Forum,
96(1173).
Kantert, J., Bernard, Y., Klejnowski, L., and M¨uller-
Schloer, C. (2014a). Estimation of Reward and De-
cision Making for Trust-Adaptive Agents in Norma-
tive Environments. In Maehle, E., R¨omer, K., Karl,
W., and Tovar, E., editors, Architecture of Computing
Systems – ARCS 2014, volume 8350 of LNCS, pages
49–59. Springer.
Kantert, J., Scharf, H., Edenhofer, S., Tomforde, S., H¨ahner,
J., and M¨uller-Schloer, C. (2014b). A Graph Analysis
Approach to Detect Attacks in Multi-Agent-Systems
at Runtime. accepted for publication at SASO 2014.
Klejnowski, L. (2014). Trusted community : a novel multi-
agent organisation for open distributed systems. PhD
thesis, Leibniz Universit¨at Hannover.
Nute, D. (1988). Defeasible Reasoning: A Philosophical
Analysis in Prolog. In Aspects of Artificial Intelli-
gence, pages 251–288. Springer.
Nute, D. (1994). Defeasible Logic. Handbook of Logic
in Artificial Intelligence and Logic Programming,
3:353–395.
Nute, D. (2003). Defeasible Logic. In Proceedings of the
Applications of Prolog 14th International Conference
on Web Knowledge Management and Decision Sup-
port, INAP’01, pages 151–169, Berlin, Heidelberg.
Springer.
Ostrom, E. (1990). Governing the Commons: The Evolu-
tion of Institutions for Collective Action. Cambridge
university press.
Pitt, J., Schaumeier, J., and Artikis, A. (2011). The Ax-
iomatisation of Socio-Economic Principles for Self-
Organising Systems. In Self-Adaptive and Self-
Organizing Systems (SASO), 2011 Fifth IEEE Inter-
national Conference on, pages 138–147.
Rosenschein, J. S. and Zlotkin, G. (1994). Rules of En-
counter: Designing Conventions for Automated Ne-
gotiation Among Computers. MIT Press, Cambridge.
Sartor, G. (2005). Legal Reasoning: A Cognitive Approach
to Law. Springer.
Savarimuthu, B. T. R. and Cranefield, S. (2011). Norm Cre-
ation, Spreading and Emergence: A Survey of Simula-
tion Models of Norms in Multi-Agent Systems. Mul-
tiagent and Grid Systems, 7(1):21–54.
Schmeck, H., M¨uller-Schloer, C., C¸ akar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and Self-organization
in Organic Computing Systems. ACM Trans. on Aut.
and Adap. Sys., 5(3):1–32.
Singh, M. P. (1999). An Ontology for Commitments in
Multiagent Systems. Artificial Intelligence and Law,
7(1):97–113.
Stegh¨ofer, J.-P., Kiefhaber, R., Leichtenstern, K., Bernard,
Y., Klejnowski, L., Reif, W., Ungerer, T., Andr´e, E.,
H¨ahner, J., and M¨uller-Schloer, C. (2010). Trustwor-
thy Organic Computing Systems: Challenges and Per-
spectives. In Proc. of ATC 2010. Springer.
Tomforde, S., Prothmann, H., Branke, J., H¨ahner, J., Mnif,
M., M¨uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and Control of Organic Systems.
In Organic Computing -A Paradigm Shift for Complex
Systems, pages 325 – 338. Birkh¨auser.
Tuomela, R. and Bonnevier-Tuomela, M. (1995). Norms
and Agreements. E. J. of Law, Philosophy and Com-
puter Science, 5:41–46.
Urzic˘a, A.and Gratie, C. (2013). Policy-Based Instantiation
of Norms in MAS. In Fortino, G., Badica, C., Malgeri,
M., and Unland, R., editors, Intelligent Distributed
Computing VI, volume 446 of Studies in Computa-
tional Intelligence, pages 287–296. Springer.
von Wright, G. H. (1963). Norms and Action: A Logical
Enquiry. Routledge & Kegan Paul.
Wang, Y. and Vassileva, J. (2004). Trust-Based Community
Formation in Peer-to-Peer File Sharing Networks. In
Proc. on Web Intelligence, pages 341–348.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
156
