
Extending the MASITS Methodology for General Purpose Agent
Oriented Software Engineering
Egons Lavendelis
Department of Artificial Intelligence and Systems Engineering, Riga Technical University, Riga, Latvia
Keywords: MASITS Methodology, Agent Oriented Software Engineering, Multi-agents Systems.
Abstract: The aim of the paper is to extend the agent oriented software engineering methodology MASITS that was
initially developed for agent based Intelligent Tutoring System (ITS) development to make it usable for
other agent oriented system development. The paper analyses the steps of the methodology, finds the
specific ones that are either adapted to ITS characteristics or use particular artefacts from ITS research.
Three extensions of the methodology have been developed, namely, a general holonic architecture, agent
definition method and interaction design method. As a result, the extended version of the methodology can
be used for agent oriented system development in case the system has similar characteristics to agent based
ITSs. Case study of the insurance policy market automation software is used to validate the use of the
extended version in the development of other kind of systems than ITSs.
1 INTRODUCTION
Multi-agent paradigm has been developed a few
decades ago and is theoretically applicable to solve a
wide range of complex problems. Despite of
intensive research there are very few representative
commercial applications. One of the reasons for that
is the lack of sufficient methodological support for
industrial development process. To overcome this
obstacle, during the last two decades large number
of Agent Oriented Software Engineering (AOSE)
methodologies has been proposed to support the
development of multi-agent systems. The existing
methodologies can be divided into two main groups,
namely general purpose and domain specific agent
oriented software engineering methodologies. The
first group provides general enough techniques to be
usable for any type of the agent oriented software.
This causes also the main disadvantage – the process
is not adapted to the particular type of the systems
and often includes unnecessary tasks. Examples of
this group are Gaia (Zambonelli et al, 2005),
Prometheus (Padgham and Winikoff, 2004) and O-
MaSE (DeLoah, 2014).
The second group provides tools and techniques
that are more appropriate to the particular type of
systems. Usually the specific methodologies have
been developed for very narrow class of systems, for
example, Intelligent Tutoring Systems (ITSs)
(Lavendelis and Grundspenkis 2009a), electricity
distribution systems (Varga et al, 1994) or
organization integration (Kendall et al 1995). These
methodologies usually adapt the AOSE process to
the characteristics of particular systems to simplify
the software engineering process, by including
knowledge from the particular domain and using
more specific techniques compared to general
purpose methodologies. Thereby it is obvious that
these methods are not applicable outside the specific
domain. Still some of the development mechanisms
used in specific purpose agent oriented software
engineering methodologies are suitable for wider
classes of systems than initially designed. Thus it
might be useful to reuse these specific purpose
methodologies to other domains with similar
characteristics. The paper analyses the MASITS
methodology that was originally developed as a
specific purpose agent oriented software engineering
methodology for ITS development (Lavendelis and
Grundspenkis, 2009a) and extends it for the wider
range of agent oriented systems.
The remainder of the paper is organied as
follows. The Section 2 briefly outlines the original
version of the MASITS methodology. The Section 3
analyzes the original methodology and concludes the
needed extensions for the methodology to be usable
in the development of wider range of the systems.
157
Lavendelis E..
Extending the MASITS Methodology for General Purpose Agent Oriented Software Engineering.
DOI: 10.5220/0005202201570165
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 157-165
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
The Section 4 describes the extended version of the
methodology. The Section 5 outlines the case study
of the methodology’s extended version. The Section
6 concludes the paper.
2 THE MASITS METHODOLOGY
MASITS (MAS for ITS) is a specific purpose AOSE
methodology for ITS development (Lavendelis and
Grundspenkis, 2009a). The MASITS methodology
comprises the most important results of ITS
development research and AOSE methodologies.
The development techniques are adapted to the main
characteristics of the ITSs.
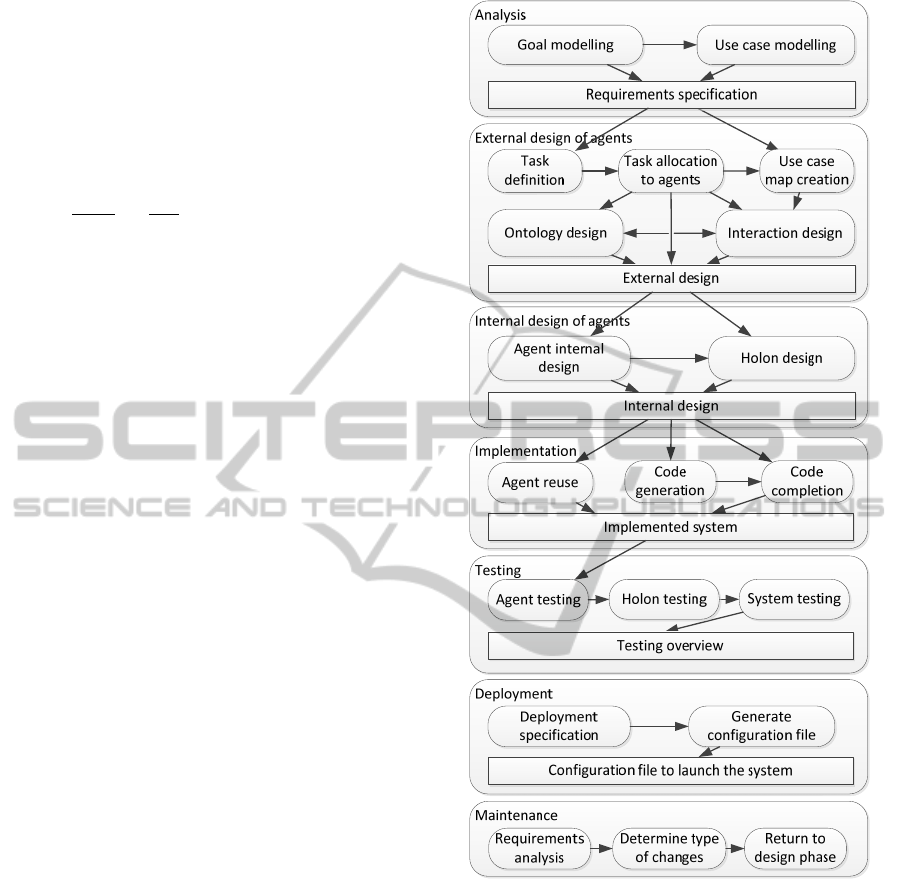
The process of software engineering according to
the MASITS methodology consists of the following
phases: analysis, design (divided into two stages:
external and internal design of agents),
implementation, testing, deployment and
maintenance. These phases are presented
sequentially, although the development process is
iterative. Iterations are used both inside the phases
and across different phases. Developer of the system
is allowed to return to any previous phase and refine
the previously created models (Lavendelis &
Grundspenkis, 2009a). Phases of the development
process and steps included in these phases are shown
in Figure 1.
One of the successful developments is the
MIPITS system that teaches course “Fundamentals
of Artificial Intelligence” to undergraduate students
at Riga Technical University. The agent based
approach is used to provide different types of tasks
and adapt tasks to the needs of individual students
(Lavendelis and Grundspenkis, 2010). The MIPITS
system also proved the usefulness of the holonic
architecture and openness of the system. As
described in (Lavendelis and Grundspenkis, 2011),
the system can be easily extended with a new task
and its assessment mechanisms without changing the
existing code of the system. Based on this
experience it was concluded that MASITS
methodology can be successfully used for the ITS
development and could possibly be extended to be
usable for wider range of systems. The next section
analyses the ITS specific steps in the development
process and identifies the needed extensions for the
methodology to be usable in the development of the
wider range of systems.
Figure 1: Structure of the MASITS methodology.
3 METHODOLOGY ANALYSIS
The MASITS methodology adapts the software
engineering process for the agent based ITS
development. It includes knowledge from the ITS
research and contains specific techniques that are
suitable for the characteristics of ITSs. The
methodology simplifies several steps of the
development by eliminating redundant and repeating
tasks that are the same for all the ITSs, because the
results of these steps are already included in the
methodology, for example, the methodology
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
158

contains a typical set of agents that is used to
implement any ITS and the designer can modify (if
needed) and reuse it (Grundspenkis and Anohina,
2005).
It can be concluded that the adapted development
process not only simplifies ITS development, but
also is the main obstacle for the use of the
methodology in other agent based system
development if these systems have other
characteristics than ITSs or do not have the
corresponding artefacts that are used from ITS
research in the original version of the methodology.
For example, the original version of the
methodology will not be efficient for systems where
the set of agents must be defined or complex
communications among agents must be designed.
The remainder of this section lists the steps of the
methodology and outlines the specific techniques
and artefacts that must be changed to enable usage
of the methodology for wider class of agent based
systems.
The analysis phase consists of two consecutive
steps:
Goal modelling resulting in goal diagram that
depicts goal hierarchy of the system and goal
descriptions. This step is specific for goal based
systems, but is not ITS specific.
Use case modelling resulting in a use case model
containing diagrams and use case descriptions.
This is a well-known technique in software
engineering and is not ITS specific.
The first stage of the design phase is external
design of agents when agents are designed in terms
of their functionalities and interactions among them.
This stage consists of the following steps:
Task definition. This step contains task definition
according to the steps of use case scenarios and
crosscheck of defined tasks against goals. The
step is not ITS specific.
Task allocation to agents. During this step tasks
are organized into hierarchies and assigned to
agents. This step uses the following ITS based
artefacts (1) higher level agent set (Grundspenkis
and Anohina, 2005), (2) holonic agent
architecture (Lavendelis and Grundspenkis,
2008), (3) informal rules for task allocation to
agents (Lavendelis and Grundspenkis, 2009a).
These artefacts allow to modify the existing ITS
research based set of agents instead of defining
the set of agents for every ITS from scratch. The
need for these artefacts limits the use of the
methodology for any other type of systems.
Interaction design. This step results into
interaction diagram that depicts agents, users and
links among them. Links among agents are
designed only in terms of messages sent. In more
complex cases this step may include a use case
map creation as a sub-step. This step is adapted
to the fact that agents in ITSs send relatively low
number of messages, there are no complex
interactions and as a consequence the order of
messages is self-explanatory. This step is not
suitable to systems with intensive
communications among agents or any complex
interaction mechanisms that must be designed
separately.
Initial ontology design. The domain ontology is
created in parallel to the interaction design to
define the contents of the messages sent in terms
of the predicates. The step results in the initial
ontology diagram. This step is not ITS specific.
During the second stage of the design, namely, the
internal design of agents, the internal structure of
agents is defined in the internal views of agents. The
MASITS methodology designs agents in terms of
low level concepts that correspond to the selected
implementation platform JADE (Java Agent
DEvelopment Framework, http://jade.tilab.com/). It
ensures easy transition to implementation phase and
easy code generation. Therefore, agents are designed
in terms of messages sent and received, events
perceived and actions done by the agents.
Additionally the MASITS methodology supports
design of holonic MASs. The holonic architecture
used for this purpose is ITS specific. As a
consequence the whole stage is implementation
platform specific, and in case of holonic MASs also
ITS specific.
The implementation phase of the MASITS
methodology consists of the following three steps:
Agent reuse. During this step lower level agents
from previous projects can be reused if they have
the needed functionality. An ITS specific library
of agents is used for this purpose.
Code generation. In this step the MASITS tool is
used to generate the source code from the
detailed design. This step is not ITS specific.
Code completion. This step is programming. The
generated code is completed by adding detailed
code of all methods.
During the testing phase JADE test suite (Cortese et
al., 2005) is used to develop and execute tests. Thus
the phase is implementation platform specific, but is
not ITS specific.
Deployment is done by using modified version
of the UML deployment diagram that shows JADE
containers and agent instances deployed in each
container. The diagram is used by MASITS tool to
ExtendingtheMASITSMethodologyforGeneralPurposeAgentOrientedSoftwareEngineering
159
generate a configuration file. This step is
implementation platform specific, but not ITS
specific.
During the maintenance phase the MASITS
methodology supports change implementation into
the system. The holonic architecture simplifies the
implementation of changes that are related to the
functionality of only one or small number of holons.
Thus the phase is specific to the holonic multi-agent
systems.
The Table 1 summarizes the specific steps that
restrict the usage of the MASITS methodology for
development of other types of systems.
Table 1: ITS specific approaches in the steps of the
MASITS methodology.
Step Specific approaches Results of ITS
research used
External design of agents
Task
allocation to
agents
Tasks are assigned to
already known set of
higher level agents
Set of higher level
agents and holonic
architecture
Interaction
design
Interactions among agents
are designed only in the
form of messages sent
-
Internal design of agents
Agent
internal
design
Specific concepts to JADE -
Holon design Specific to holonic multi-
agent systems
Holonic ITS
architecture
Implementation
Agent reuse Reuse agents from
previously created ITSs
Library of
previously created
ITSs
Code
generation
Agents are implemented
in JADE platform
-
Code
completion
Agents are implemented
in JADE platform
-
Testing
The whole
phase
Uses JADE Test Suite and
thus is platform specific
Holonic ITS
architecture
Deployment
Generate
config. file
JADE specific
configuration
-
Maintenance
The whole
phase
Holonic architecture is
used in change
implementation
Holonic ITS
architecture
4 EXTENSIONS OF THE
METHODOLOGY
Based on the analysis done in the previous section it
has been concluded that the main obstacles to use
the MASITS methodology in the development of
other types of systems than ITSs are the following:
Multiple steps of the methodology use a set of
higher level agents and the holonic ITS
architecture. It is solved by providing a general
holonic architecture described in the Section 4.1.
The methodology uses predefined set of agents
and customizes it as needed in the ITS
development, that is not possible in case of other
systems. The Section 4.2 outlines agent
definition method that substitutes the task
allocation method.
The interactions are designed only in terms of
messages sent among agents that is not enough in
case of complex interactions. To resolve it, new
interaction design method is proposed in Section
4.3.
The internal design of agents, implementation,
testing and deployment are done in the platform
specific way that limits the use of the
methodology to the systems implemented in
JADE. Still this is not changed, because more
general methods make the transition from the
design to the implementation more complex.
4.1 General Holonic Architecture
One of the advantages of the MASITS methodology
is the possibility to design systems of any
complexity due to the usage of holonic multi-agent
paradigm initially proposed by Fischer et al (2003).
The methodology designs the system by
decomposing it into holons. Holons are agents that
consist of subholons or subagents. They consist of a
single head and some body agents. The head
represents the holon outside it and coordinates body
agents. The design of holons is done in the top down
approach. Each holon initially is designed as a single
agent and afterwards its internal structure is
designed. This approach requires holonic
architecture. In case of ITSs a domain specific
architecture (Lavendelis and Grundspenkis, 2008) is
used. To make the methodology usable for other
types of systems and keep the advantage of the
holonic system design general holonic architecture
has been included in the methodology and used
instead of the specific one.
The developed general architecture (see Figure
2) keeps the main characteristics from the specific
one. It is open, hierarchical and holonic. The system
appears to the user as a single holon. This holon is
called the higher level holon and is represented by
an interface agent, which is the head of the holon.
The interface agent is the only agent interacting with
the user. Other functions of the system are realized
in higher level agents that are included in the body
of the main holon. The higher level holon may
contain any number of higher level agents. These
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
160

agents are defined during the design time (agent
definition method is given in the next subsection).
Thus the higher level holon is closed in the sense
that no new agents can be added to the system after
the development has ended. Each of the higher level
agents can be implemented in one of the following
ways:
As a single agent. This option is chosen if the
corresponding functionality is simple and can be
implemented in a single component. It is not
recommended if the functionality will be
changed frequently.
As a closed holon. In this case the higher level
agent is implemented as a multi agent system.
Term closed means that the lower level agents
are defined in the design time and cannot be
changed during the runtime.
As an open holon. Similarly to the previous
option the agent is implemented as a multi-agent
system, but at the design time only the types of
body agents are defined. Actual number and
instances of body agents may vary in the runtime
of the system.
As a multi-level holon hierarchy. Each lower
level agent in any holon can be implemented as a
multi-agent system itself, so creating multi-level
hierarchy. The depth of the hierarchy is
unlimited (Figure 2 shows only the first two
levels for readability reasons).
Figure 2 gives examples of all possible types of
higher level agents.
Figure 2: General holonic architecture.
4.2 Agent Definition Method
The original version of MASITS methodology uses
predefined set of higher level agents coming from
the ITS research (Grundspenkis and Anohina, 2005)
and instead of agent definition step includes task
assignment step to the higher level agents. To enable
development of other kinds of agent oriented
software a method for agent definition is proposed.
The agent definition is started by grouping tasks
that will be executed by the same agent. An agent
will be created to perform each group of tasks.
Groups and as a consequence agents can be created
for one of the following entities:
Users or user roles. This approach is used if there
are many users or user roles with different
functionality needs. This approach is especially
efficient if it is necessary to autonomously
represent each user and negotiate with others
agents on behalf of the corresponding user.
Organizations or stakeholders. This option is
chosen if there is a need to autonomously
represent each stakeholder in the system. An
example of such systems is electronic
marketplaces.
Legacy systems or any standalone components
that must be integrated into the system. This
approach is used if the role of multi-agent system
is to integrate several systems.
Use cases. This approach is used if the system
has several relatively unrelated use cases and
each of them can be processed by a
corresponding agent.
Knowledge types. This option is chosen if agents
have to process different types of knowledge.
Based on the above principles the following iterative
method has been included in the methodology:
1. Choose one or several of the abovementioned
approaches for agent definition.
2. Group tasks and create task hierarchies from the
previously defined tasks according to the chosen
grouping strategies.
3. Define agents for task hierarchies. An agent can
be defined for one or several task hierarchies.
4. Principles for hierarchy grouping have been
taken from Prometheus methodology (Padgham
and Winikoff, 2004):
a. If two tasks are closely related then they
should be allocated to the same agent. If
two tasks are not related they should not be
assigned to the same agent.
b. If two tasks include processing of the same
knowledge then they should be assigned to
the same agent.
5. If more than one approach is chosen in the step 1
then steps 2-4 are repeated to define sets of
agents for all these approaches.
6. The sets are evaluated according to the principles
defined in the Step 4 and the best one is chosen.
The output of the method is a set of higher level
agents and task-agent diagram that is identical to the
one in the original version of the MASITS
ExtendingtheMASITSMethodologyforGeneralPurposeAgentOrientedSoftwareEngineering
161
methodology and can be used in the following steps
without any changes.
4.3 Interaction Design Method
In the original version of the MASITS methodology
interactions are modelled only in terms of messages
sent among agents and not in terms of interaction
protocols. Such an approach is sufficient due to the
specifics of ITSs, but is not enough in other systems.
Thus the interaction design step has been changed to
the following form to include also protocol design if
it is needed:
1. Interaction design and creation of the MASITS
interaction diagram. This diagram is sufficient
for the simplest interactions.
2. If the interactions are too complex or unknown
for the designer use case maps are created in the
same way as in the original version of the
methodology.
3. Interactions containing too many interactions and
making the diagram unreadable are depicted in
separate interaction diagrams.
4. Interactions where it is important not only to
specify the messages sent, but also the order and
context of the messages are depicted in the
protocol diagrams.
5. Creation of the initial ontology. It is done during
the interaction design to enable definition of the
message contents in terms of predicates sent and
concepts that are parts of the predicates.
Original MASITS notation is used for steps 1-3 and
5 while Agent UML protocol diagram notation
(Huget and Odell, 2005) is used for protocol design.
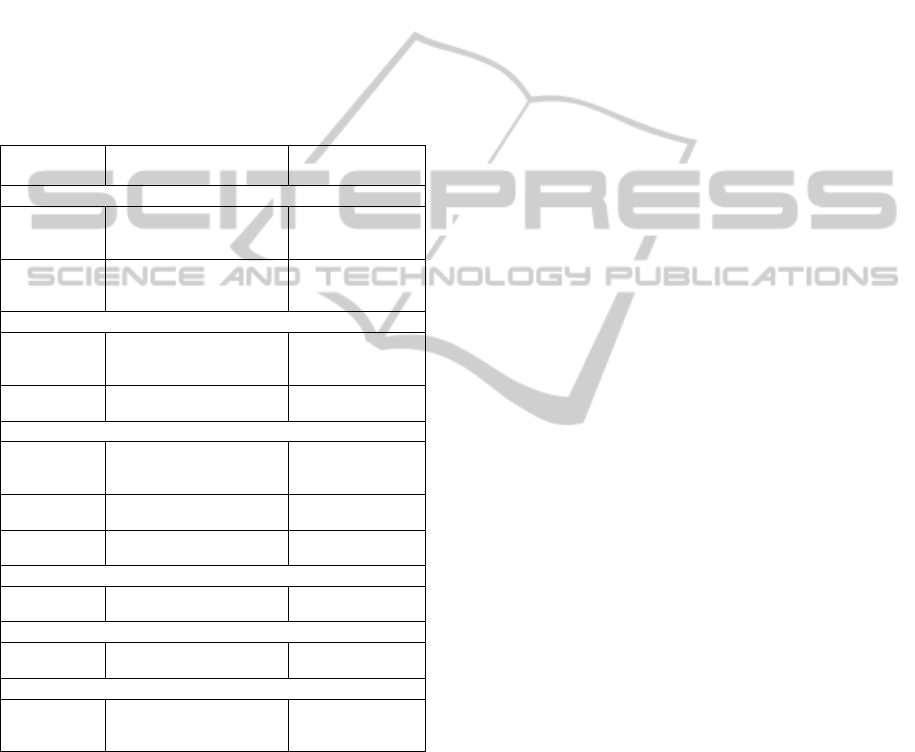
4.4 The Extended Version of the
MASITS Methodology
The structure of the extended version of the
MASITS methodology is given in Figure 3. The
changed steps and phases are highlighted with grey
colour. The last 3 phases, namely, testing,
deployment and maintenance are omitted, because
they contain no changes compared to Figure 1.
The extended version of the MASITS
methodology is usable for development of systems
that have the following main characteristics similar
to ITSs:
Software system where agents implement
system’s modules.
Software that implements intelligent mechanisms
like adaptation mechanisms in ITSs.
Goal directed system, because MASITS
development process starts with goal definition
and the development is goal oriented.
Highly modular system. System consists of large
number of agents that implement system’s
functionality.
Figure 3: Structure of the extended version of the
MASITS methodology.
Additionally the usage of the holonic architecture
provides the following possibilities:
The architecture of the system is hierarchical
enabling to implement any agent as a multi-agent
system. As a consequence system can be of any
complexity, because it is divided into holons that
are designed separately.
Open system. It is possible to create an open
system by defining what types of agents can be
added to the system. It is extremely important if
the system may need to implement some
function in new ways, for example to provide
new types of learning materials in ITSs.
Finally, the methodology specifies use of a
particular implementation environment. As
discussed in (Lavendelis and Grundspenkis, 2009a)
it simplifies the practical development process, but
also adds the following limitations: (1) System is
implemented in JADE platform (Bellifemine et al,
2007) and Java programming language; (2) the
system consists of behaviour based agents.
5 CASE STUDY
A simulation tool for automated interactions
between insurance companies and their clients is
developed as a case study of the extended version of
the MASITS methodology. The tool automates
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
162
travel insurance market by implementing
interactions among a client and Latvian insurance
companies during policy buying (Lavendelis and
Grundspenkis, 2014). The tool implements auction
mechanism where a client is an auctioneer and the
insurance companies are bidders.
The simulation tool has three main modules,
namely, client module, insurance company module
and monitoring module. Thus the system consists of
three different modules that can be implemented as
agents. The mechanisms needed to represent both
parties in the market (client and insurance
companies) need intelligence to be executed
adequately. First of all components need autonomy
to work in the simulated marketplace. Secondly,
they need reactivity to monitor the situation in the
market and proactivity to find the correct strategies
that achieve the goals of the corresponding
stakeholder. So one can conclude that the insurance
market automation tool complies with the
characteristics of systems that can be developed by
the extended version of the MASITS methodology
and at the same time it is from different domain than
ITS and thus was chosen as a case study for the new
version of the methodology.
All the steps of the MASITS methodology were
done to develop the simulation tool. In this chapter
the use of the three extensions proposed above will
be outlined.
During the agent definition step it was concluded
that two types of the stakeholders must be
autonomously represented in the insurance policy
market, namely the client and insurance companies.
Thus tasks were grouped and agents were defined
according to the stakeholders. As a result, each
insurance company and the client are represented by
particular autonomous agents, namely client agent
and company agents. The market monitoring agent
is added to carry out the functions of the monitoring
module, in particular, to monitor the actions done by
the agents of insurance companies, so ensuring that
they comply with the legislation. As a consequence
the higher level of the system will contain these
three types of agents.
During the whole development process the
MASITS tool (Lavendelis and Grundspenkis 2009b)
was successfully used for the automation of the
development process. It was used for the following
tasks:
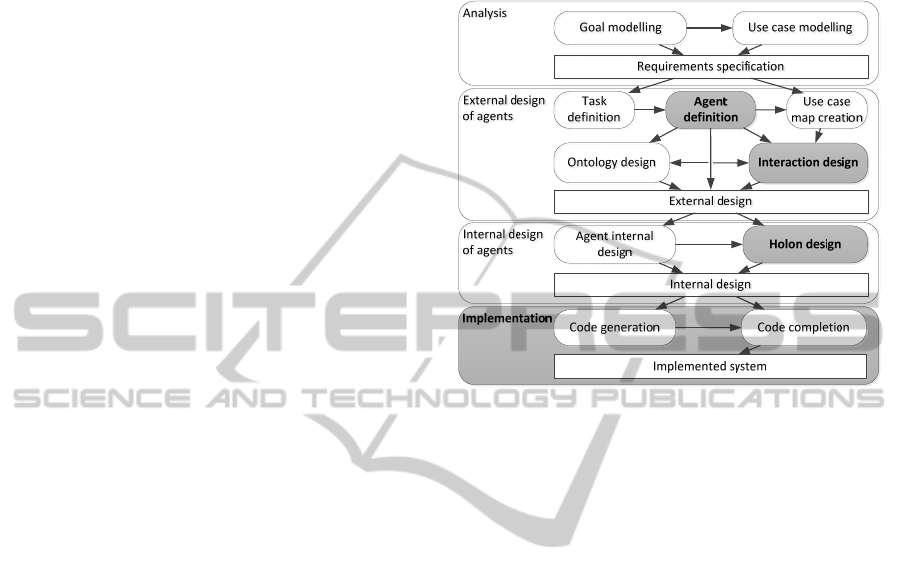
Drawing all diagrams. The task hierarchy
assigned to the company agent is shown in the
Figure 4 as an example of the diagram developed
in the MASITS tool.
Connecting elements with the same meaning in
different diagrams ensuring the compliance
between diagrams created during different stages
of the development.
Lastly, it was used for Java code generation of
JADE agents and their behaviours.
Figure 4: Task hierarchy assigned to the company agent.
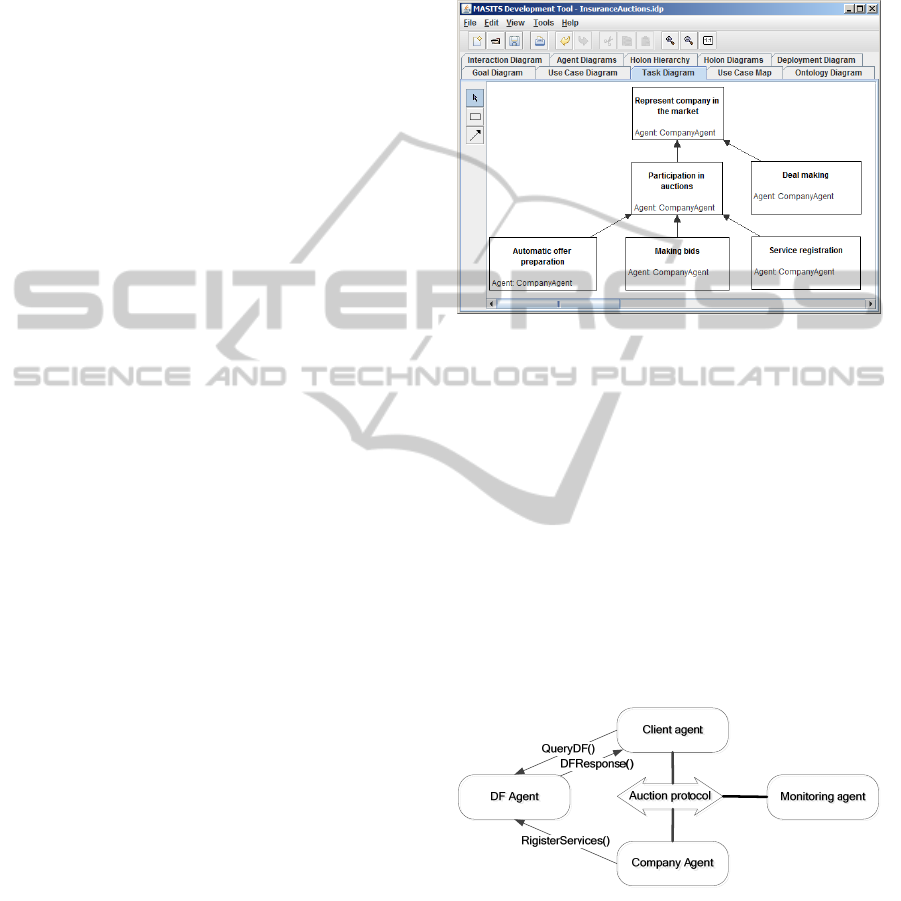
The interaction design was done in two levels. First
the interaction diagram was created. Initially the
interactions were designed in the interaction
diagram. Afterwards protocol diagrams were created
for the auction protocols. This approach had two
advantages comparing to the initial version of the
MASITS methodology and other methodologies: (1)
the interaction diagram was kept simple (see Figure
5) and (2) the order and context of messages was
specified. The messages sent in the protocols were
designed according to the FIPA standards (FIPA
2014). The interaction design step was the last step
that differed from the initial version of the MASITS
methodology.
Figure 5: The interaction diagram.
The case study showed the advantage over other
methodologies that the extended version of the
MASITS methodology keeps from the original one,
namely, the easy transformation from the design to
the implementation. It is ensured by the following
two facts. Firstly, the design is done in terms of the
JADE platform and no transformation to the
ExtendingtheMASITSMethodologyforGeneralPurposeAgentOrientedSoftwareEngineering
163
implementation concepts is needed. Secondly, the
MASITS tool generates the code of the agent and
behaviour classes and only the method code must be
completed manually.
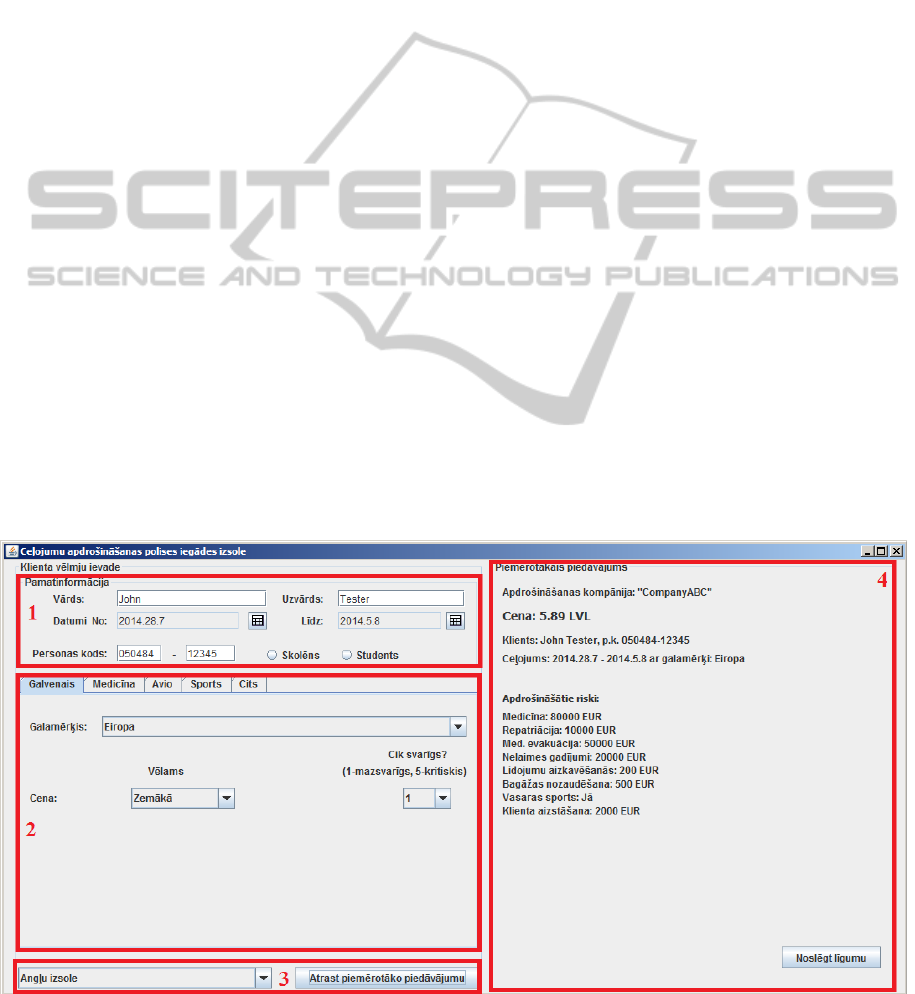
As a result of the development process a
simulation tool was successfully implemented. The
user interface of the developed simulation tool is
given in the Figure 6. It is in Latvian, because
Latvian insurance market is modelled.
The usage of the developed simulation tool
consists of the following steps:
1. Input of the information about the client and the
travel details for which the insurance is needed;
The information about the client and travel dates
must be entered in the upper left area denoted
with 1 in Figure 6. The area denoted with 2 in
Figure 6 is for input of preferred values and
importance weights of all the criteria used in the
evaluation of the deal. The first criterion is price
and other criteria are coverage of different
insurance risks. The tabs in this area splits
criteria input into thematic groups.
2. Auction choice and start of the auction. The
client must select the auction type (English,
Dutch, First price sealed bid and Vickrey
auctions are available) and start the execution of
the auction. It is done in the area of the user
interface denoted by 3 in the Figure 6.
Afterwards client agent carries out the chosen
type of the auction autonomously and finds the
winning deal. The best deal is determined by
multiple criteria. Thus the multi-criteria
insurance deal evaluation model and multi-
criteria auction protocol presented in (Lavendelis
and Grundspenkis, 2014) are used.
3. Data output. The data about the winning
offer is presented in the right part of the user
interface that is denoted by 4 in the Figure 6. If
the client is not satisfied with the offer, he/she
can change some input data and go through the
steps 2 and 3 again.
One of the significant advantages of the extended
MASITS methodology compared to other
methodologies, is the fact that it allowed to
implement the openness of the system in the
following way. The insurance company agents can
join or leave the system at any time, because the list
of companies working in the insurance market may
change dynamically. Thus the higher level holon is
open for new agents of this type. Any agent that is
capable to follow auction protocols may register at
the directory facilitator agent of the JADE platform
(Bellifemine et al, 2007) and become the member of
the system.
6 CONCLUSIONS
The paper presents an extension of the MASITS
agent oriented software engineering methodology
that enables to use it for other systems than ITSs. As
a result, the extended methodology is not any more
specific to ITS development, but for larger class of
agent oriented software. It was proved by the
development of the market simulation tool.
Figure 6: The user interface of the developed insurance market simulation tool.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
164

The paper provides a new approach to develop
new AOSE methodology for development of
systems with certain characteristics. It is done not by
specializing a general purpose methodology and
adapting the techniques used there, but by taking
more specific methodology and identifying the steps
that are too specific and generalizing them. The
advantage of this approach is the fact that the
specific methodology has been validated in the
development of systems with similar characteristics.
It was chosen to leave the methodology
implementation platform specific, so limiting the use
of the methodology, because as it was concluded in
(Padgham and Winikoff, 2004) and (Lavendelis and
Grundspenkis, 2009a) the methodologies that are not
implementation platform specific have very weak
support of the implementation phase, because it is
not possible to support transition from the design
time concepts into all possible implementations. An
example of such methodology is Gaia (Zambonelli
et al, 2005). Contrary, the choice of the
implementation platform at the design time enables
easy transition to the implementation. In the
MASITS methodology this transition is supported
by code generation algorithms and MASITS tool
implementing them.
One of the directions of the future work is to
develop more case studies of the extended version of
the methodology. The case study in the
transportation and logistics domain is currently
under development at Riga Technical University.
ACKNOWLEDGEMENTS
The work has been partly supported by Latvian
National Research Programmes IMIS and SOPHIS.
REFERENCES
Bellifemine F. L., Caire G., Greenwood D., 2007.
Developing Multi-Agent Systems with JADE. Wiley,
300 p.
Cortese, E. et al., 2005. JADE Test Suite – USER Guide.
Available online:
http://jade.tilab.com/doc/tutorials/JADE_TestSuite.pdf
(Last visited: 24.07.2014).
DeLoah S., 2014. O-MaSE An Extensible Methodology
for Multi-Agent Systems. In Agent Oriented Software
Engineering, pp 173-192.
Fischer K., Schillo M., Siekmann J., 2003. Holonic
Multiagent Systems: A Foundation for the
Organisation of Multiagent Systems, Lecture Notes in
Computer Science 2744, Springer.
FIPA, 2014. FIPA interaction protocol specifications.
Available online: http://www.fipa.org/repository
/ips.php3 (Last visited: 27.07.2014).
Grundspenkis, J. and Anohina, A., 2005. Agents in
Intelligent Tutoring Systems: State of the Art.
Scientific Proceedings of Riga Technical University
„Computer Science. Applied Computer Systems”, 5th
series, Vol.22, Riga, pp.110-121.
Huget M.P., Odell J., 2005. Representing Agent
Interaction Protocols with Agent UML. Agent-
Oriented Software Engineering V. Lecture Notes in
Computer Science. Volume 3382, 2005, pp 16-30.
Kendall, E.A., Malkoun, M.T., Jiang, C.A., 1995.
Methodology for Developing Agent Based Systems
for Enterprise Integration. In IFIP Working
Conference of TC5 Special Interest Group on
Architectures for Enterprise Integration, Queensland,
Australia, November 1995.
Lavendelis E., Grundspenkis J., 2008. Open Holonic
Multi-Agent Architecture for Intelligent Tutoring
System Development. In Proceedings of IADIS Int.
Conference „Intelligent Systems and Agents 2008”,
Amsterdam, 22-24 July 2008, pp. 100-108.
Lavendelis E., Grundspenkis J., 2009a. MASITS – A
Multi-Agent Based Intelligent Tutoring System
Development Methodology. In Proceedings of IADIS
International Conference „Intelligent Systems and
Agents 2009”, 21-23 June 2009, Algarve, Portugal,
pp. 116-124.
Lavendelis E., Grundspenkis J., 2009b. MASITS - A Tool
for Multi-Agent Based Intelligent Tutoring System
Development. Advances in Intelligent and Soft
Computing Vol. 55. Springer, pp. 490-500.
Lavendelis E., Grundspeņķis J., 2010. MIPITS - An Agent
based Intelligent Tutoring System. Proceedings of 2nd
International Conference on Agents and Artificial
Intelligence (ICAART 2010). Vol. 2., Spain, Valencia,
January 22-24, 2010. pp. 5-13.
Lavendelis E., Grundspenkis J., 2011. MASITS
Methodology Supported Development of Agent Based
Intelligent Tutoring System MIPITS In
Communications in Computer and Information
Science (CCIS), Vol. 129. Springer, 2011, pp. 119-
132.
Lavendelis, E., Grundspenkis, J. 2014. Multi-Agent
Auction Based Simulation Tool for an Insurance
Policy Market. Applied Computer Systems. Vol.15,
2014, pp.5-13.
Padgham L. and Winikoff M., 2004. Developing
intelligent agent systems. A practical guide. New
York. John Wiley and Sons. 240 p.
Varga, L.Z., Jennings, N.R., Cockburn, D., 1994.
Integrating intelligent systems into a cooperating
community for electricity distribution management. In
International Journal of Expert Systems with
Applications 7 (4), pp. 563-579.
Zambonelli, F., et al., 2005. Multi-Agent Systems as
Computational Organisations: The Gaia Methodology.
Agent-Oriented Methodologies, Idea Group
Publishing, London, pp. 136-171.
ExtendingtheMASITSMethodologyforGeneralPurposeAgentOrientedSoftwareEngineering
165
