
From Simulation to Development in MAS
A JADE-based Approach
Jo
˜
ao P. C. Lopes
1
and Henrique Lopes Cardoso
1,2
1
DEI/FEUP, Faculdade de Engenharia, Universidade do Porto, Portugal
2
LIACC – Laborat
´
orio de Intelig
ˆ
encia Artificial e Ci
ˆ
encia de Computadores, Porto, Portugal
Keywords:
Multi-Agent Systems, Multi-Agent-Based Simulation, Model Conversion, Standards.
Abstract:
Multi-agent systems (MAS) present an effective approach to the efficient development of modular systems
composed of interacting agents. Several frameworks exist that aid the development of MAS, but they are
often not very appropriate for some kind of uses, such as for Multi-Agent-based Simulation (MABS). Other
frameworks exist for running simulations, sharing little with the former. While open agent-based applica-
tions benefit from adopting development and interaction standards, such as those proposed by FIPA, most
MABS frameworks do not support them. In this paper we propose an approach to bridge the gap between
the development and simulation of MAS, by putting forward two complementary tools. The Simple API for
JADE-based Simulations (SAJaS) enhances MABS frameworks with JADE-based features, and the MAS Sim-
ulation to Development (MASSim2Dev) tool allows the automatic conversion of a SAJaS-based simulation
into a JADE MAS, and vice-versa. Repast Simphony was used as the base MABS framework. Our proposal
provides increased simulation performance while enabling JADE programmers to quickly develop their simu-
lation models using familiar concepts. Validation tests demonstrate the significant performance gain in using
SAJaS with Repast Simphony when compared with JADE and show that using MASSim2Dev preserves the
original functionality of the system.
1 INTRODUCTION
A multi-agent system (MAS) is composed of au-
tonomous intelligent agents, capable of interacting
with each other (Wooldridge, 2008). Agent-based
applications are in widespread use in multiple fields
of research and industry and can be heterogeneous,
often requiring interoperation between agents from
different systems. In order to make this possible,
agent technologies have matured and standards have
emerged to support the interaction between agents.
The specifications of the Foundation for Intelli-
gent Physical Agents (FIPA)
1
promote interoperabil-
ity in heterogeneous agent systems. These standards
define not only a common Agent Communication
Language (ACL), but also a group of interaction pro-
tocols, recommended facilities for agent management
and directory services (O’Brien and Nicol, 1998).
Several frameworks exist (Nikolai and Madey,
2009; Allan, 2009) that offer some level of abstraction
from low level development of agent-based applica-
tions, allowing programmers to focus on a more con-
1
http://www.fipa.org/
ceptual approach in MAS design. It turns out, though,
that FIPA standards (or any standards) are not sup-
ported by all of them.
Multi-agent based simulations (MABS) are some-
times used on the course of the development of a full-
featured MAS – for instance, for testing purposes –
for the potential gains in performance when simulat-
ing MAS. However, most platforms for MAS devel-
opment are not well suited for MABS due to scalabil-
ity limitations (Mengistu et al., 2008). Interest exists
in solutions that make MABS more easily created us-
ing MAS development frameworks. Furthermore, an
opportunity exists to partially automate the develop-
ment of robust MAS from a previously tested simula-
tion.
In this paper we focus on two frameworks, JADE
and Repast. For this paper, version 4.3.2 of JADE and
version 2.1 of Repast Simphony (henceforth simply
“Repast”) were used.
JADE (Bellifemine et al., 2007) is a FIPA-
compliant, general-purpose (i.e. not focused on a sin-
gle domain) framework used in the development of
distributed agent applications. It is a very popular
75
Lopes J. and Lopes Cardoso H..
From Simulation to Development in MAS - A JADE-based Approach.
DOI: 10.5220/0005214600750086
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 75-86
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

MAS development framework that allows the creation
of seamless distributed agent systems and complies
with FIPA standards. It uses an architecture based on
agent containers which allows the abstraction from
the network layer, meaning that there is no differ-
ence between interacting agents running in separate
machines or in the same one. However, experiments
with JADE show that the platform’s scalability is lim-
ited (Mengistu et al., 2008). Its multi-threaded archi-
tecture falls short in delivering the necessary perfor-
mance to run a local simulation with a large number
of agents, meaning that JADE is not an appropriate
tool to create MABS.
Repast (Collier, 2003) is an agent-based simula-
tion toolkit that allows creating simulations using rich
GUI elements and real time agent statistics. It can
easily handle large numbers of agents in a single sim-
ulation. Unlike JADE, though, Repast lacks much of
the infrastructure for agent creation and interaction.
The main motivation for this paper lies in the po-
tential performance gains when using agent simula-
tion frameworks to produce a simulation of a MAS
more complex than those typically developed with
such frameworks. Some works (Garc
´
ıa et al., 2011;
Gormer et al., 2011) propose, as a solution for bridg-
ing the gap between MAS development and simula-
tion, an integration of JADE and simulation features
by extending this framework with a simulation layer
created from scratch, or by integrating another frame-
work, such as Repast.
This work is aimed at developing an integrated
solution for bridging the domains of simulation and
development of MAS. In order to do that, two main
goals were pursued:
1. First, the creation of an adapter or API that allows
developers to abstract from simulation framework
features and use familiar ones present in MAS de-
velopment frameworks, thus creating “MAS-like
MABS”. This approach allows the resulting code
to be easily ported to a full-featured MAS frame-
work. JADE was selected for its wide use and
FIPA-compliance nature. The developed API in-
cludes JADE’s FIPA specifications for agent inter-
action and management.
2. Second, the development of a code conversion
tool. By abstracting from the simulation tools
and creating a MAS-like MABS, it becomes pos-
sible and more straightforward to engineer a tool
that performs the automatic conversion of these
MABS into equivalent MAS.
This solution is specially aimed at JADE develop-
ers who need to create a simulation of their already-
developed MAS. By converting their code, the devel-
oper can perform tests and simulation and later con-
vert the simulation back to a MAS, preserving all
changes. JADE developers can also create simula-
tions from scratch using frameworks like Repast us-
ing familiar JADE-like features, which would then be
converted to a full features JADE MAS. Finally, this
system is also of interest to Repast developers who de-
sire to expand their knowledge of MAS development
using more complex frameworks. We are aware that
this kind of facilities is only valuable for true multi-
agent based simulation, and not in general for any
agent-based modeling and simulation approach (for
which Repast is also suited).
The rest of this paper is structured as follows.
Section 2 presents related work, mainly devoted at
bridging the gap between MAS simulation and de-
velopment tools. Section 3 makes an overview of
the whole solution proposed in this paper. Sections 4
and 5 present the developed tools, SAJaS and MAS-
Sim2Dev, respectively, with more detail including
their architecture and use cases. Section 6 explains
how both tools were validated. Section 7 presents
some conclusions and Section 8 suggests some future
work to further develop SAJaS and MASSim2Dev.
2 RELATED WORK
Several frameworks exist that offer support to the de-
velopment of MAS or MABS. Some are domain spe-
cific, meaning that their purpose was well defined in
their conception. MASeRaTi (Ahlbrecht et al., 2014),
MATSim (Balmer et al., 2008) and SUMO (Kra-
jzewicz et al., 2012) are some examples of MABS
frameworks for traffic and transports simulation.
Other works like Repast (Collier, 2003), NetLogo
(Tisue and Wilensky, 2004), GALATEA (D
´
avila and
Uzc
´
ategui, 2000) and Plasma (Warden et al., 2010)
are considered general-purpose. This list comprises
only tools that are free and open source and is not
meant to be exhaustive.
Some works propose approaches that are very
similar to the solution proposed in this paper, namely
the bridging of the domains of MAS and Simulation.
MISIA, JRep and Plasma were built on top of JADE
to create a simulation environment based on it. Some
details of each of these three frameworks was pre-
sented next.
2.1 MISIA
MISIA is a middleware whose goal is to enhance the
simulation of intelligent agents and to allow the visu-
alization and analysis of agent’s behaviour. It was de-
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
76
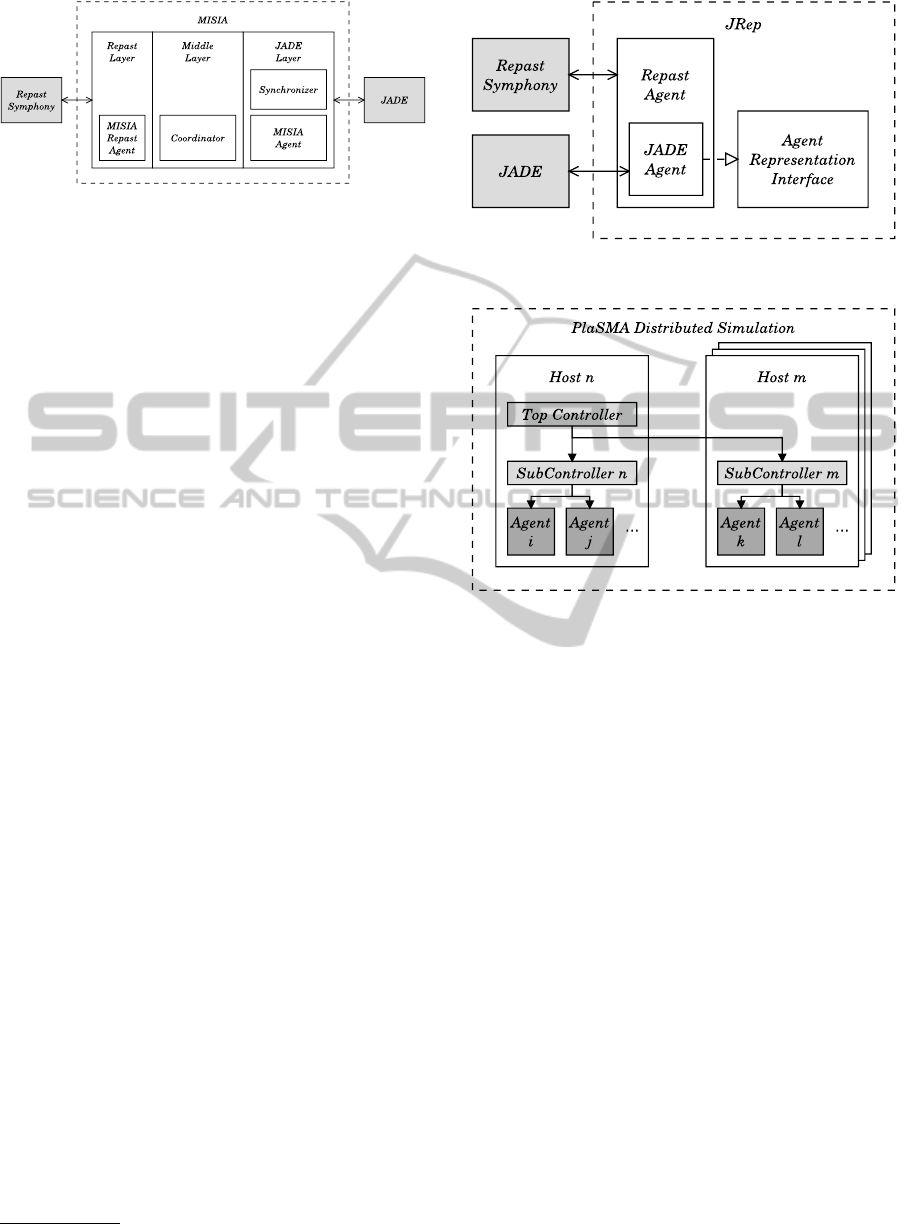
Figure 1: High-level representation of MISIA’s architecture
(adapted from (Garc
´
ıa et al., 2011)).
veloped by the Bioinformatic, Intelligent Systems and
Educational Technology Research Group (BISITE)
from Universidad de Salamanca
2
. It is no longer an
active project; as a research experiment, work on this
middleware evolved into other more specific tools.
MISIA’s approach, as suggested by Figure 1, is to
use a middle layer that acts as the bridge between two
other layers that interact with JADE and Repast. By
extending the agents in Repast and JADE, communi-
cating through a coordinator and synchronizing their
state, these agents work as a single one.
One of the challenges identified by the authors
when re-implementing the FIPA interaction protocols
was synchronizing them with the Repast tick-based
simulation model. Given JADE’s event-driven ar-
chitecture, MISIA proposes the use of a coordinator
agent that informs the JADE-Agent when a tick has
passed. It also proposes its own implementation of
the interaction protocols supported by JADE, making
them tick-friendly.
2.2 JRep
JRep’s approach is not as complex as MISIA’s. By
having the Repast Simphony agent encapsulate a
JADE agent representation, synchronization is imme-
diate and is assured without requiring an external co-
ordinator. The two agent representations take care of
synchronizing any state changes. Figure 2 represents
the basic structure of JRep.
Each agent takes care of interfacing their respec-
tive frameworks. The interaction between agents in
JRep is performed using FIPA ACL and the protocol
implementations are those provided by the JADE plat-
form. Similarly to MISIA, an Agent Representation
Interface is used to introduce the concept of schedule
in the JADE agent.
2.3 PlaSMA
Unlike the two previous frameworks, the PlaSMA
system is based solely on the JADE platform. The dis-
2
http://bisite.usal.es/
Figure 2: High-level representation of JRep’s architecture
(adapted from (Gormer et al., 2011)).
Figure 3: High-level representation of PlaSMA’s architec-
ture (adapted from (Warden et al., 2010)).
tributed simulation is synchronized by entities called
“Controllers” who communicate with the “Top Con-
troller”, keeping the pace of the simulation and han-
dling agent lifecycle management as well. Figure 3
illustrates this architecture. PlaSMA, unlike MISIA
and JRep, is still an active project.
2.4 Comparison
JADE is a very rich platform but, for many simulation
scenarios, the overhead it introduces has a significant
impact on simulation performance (Mengistu et al.,
2008).
Even though both MISIA and JRep attempt to in-
tegrate the features from both JADE and Repast, as far
as Repast simulations are concerned JADE’s multi-
threaded infrastructure affects their performance very
significantly. The main advantage of our approach is
the possibility of using Repast with JADE features,
namely FIPA specifications including interaction pro-
tocols, without the need to interface with JADE.
FromSimulationtoDevelopmentinMAS-AJADE-basedApproach
77

3 PROPOSAL
In order to benefit from different features, modeling
the same system in multiple development environ-
ments is often necessary. The two main goals of this
work have been fulfilled with two proposals:
1. The Simple API for JADE-based Simulations
(SAJaS), which provides a set of features present
in JADE; those features were reimplemented from
scratch in an attempt to simplify their internal
complexity, preserving JADE-like external execu-
tion;
2. The MAS Simulation to Development (MAS-
Sim2Dev) code conversion tool in the form of an
Eclipse plug-in that is capable of mapping JADE
features to SAJaS’ and vice versa, and convert ap-
plications developed using one into applications
based on the other, automatically. The plugin has
no Repast or JADE dependencies in the code, but
makes use of a dictionary file that is specific to
JADE and Repast.
SAJaS is an API meant to be used with simulation
frameworks to enable JADE-based features in them,
including agent interaction protocols and agent man-
agement services. It also uses JADE’s concept of be-
haviours which encapsulate most of agents’ actions.
SAJaS was initially created to be used with Repast
Simphony but was developed to allow its integration
with other simulation frameworks.
When developing SAJaS a close resemblance to
JADE’s own API was kept, not only to make the code
conversion more straightforward, but to allow profi-
cient JADE developers to create SAJaS-based simu-
lations using a familiar JADE-based API.
SAJaS does not yet implement all JADE features.
A set of the most common features were selected
which allows for the simulation of scenarios with
some complexity, including communication between
agents and the creation of custom behaviours. Fea-
tures in JADE applications which are not available in
SAJaS will typically be shown as errors when con-
verted – MASSim2Dev simply ignores them and they
should be re-implemented manually as necessary.
3.1 JADE and Repast
A study of JADE was performed to identify which
features to implement. As Table 1 illustrates, JADE
agents execute in separate threads and while this
architecture facilitates the platform’s distribution,
JADE agents are heavy in terms of resources. Experi-
ments with JADE show that the platform’s scalability
is limited in number of agents and that the global sys-
tem performance drops quickly for large numbers of
agents (Mengistu et al., 2008) (Garc
´
ıa et al., 2011).
This further strengthens the idea that using JADE or a
JADE-Repast hybrid, as described in Section 2, is not
the best course of action if performance is an impor-
tant issue.
In JADE, agents are distributed in containers.
Each host machine can contain multiple containers,
and JADE allows agents in different containers and
hosts to interact with each other. In each JADE in-
stance, a main container exists where some special
agents reside, which help in the management and ad-
dress resolution of the agents. JADE agents can even
hop onto another container.
While there is no equivalent infrastructure for
these agents in Repast, Repast contains a “Context”
object that indexes all scheduled agents. Because
Repast does not support distributed applications, there
is no need for address resolution services.
Table 1: Summary of JADE and Repast features.
JADE Repast
Interaction FIPA ACL Method calls
Shared resources
Distributed Yes No
Simul. Tools No Yes
Scalability Limited High
Ontologies Yes No
Open Source Yes Yes
Agent Behaviours Scheduler
Execution Multi thread Single thread
Event-driven Tick-driven
Assync Sync
In Repast, agent execution is scheduled manually.
An agent class can contain annotations that indicate
which methods should be called and when (for in-
stance, in every simulation tick or from time to time).
This approach is very flexible, allowing to schedule
any method; however, more complex structures are
non-existent in Repast.
JADE agent actions can be executed in their setup
and takedown, but most are encapsulated in objects
called Behaviours. JADE has many different kinds
of behaviours that function in different ways, such as
running one single task once or running them cycli-
cally. Other behaviours implement FIPA interaction
protocols, which agents can use to interact with other
agents.
3.2 FIPA Specifications
SAJaS follows JADE architecture very closely, in-
cluding how FIPA standards are implemented. The
implemented features can be divided in three cate-
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
78
gories: Agent Management, Messaging and Interac-
tion Protocols.
Agent Management includes the directory facili-
tator (DF) service and the Agent Management Service
(AMS). The DF is a component that provides a yellow
page service. It allows one agent to perform searches
about agents rendering specific services. The AMS’
purpose is to manage the agent platform, namely cre-
ating and terminating agents. Registration of each
agent in the AMS is required for agents to interact,
since it is from the AMS that agents obtain their own
AID, needed identify the agent in communication.
Messaging includes the ACL Message, the Mes-
sage Template and the Message Transport Service
(MTS). The MTS is a service for transportation of
ACL messages between agents. It is responsible for
resolving agent addresses and it may request infor-
mation from the AMS to perform this task. The
ACL Message is the envelope that contains the details
for communication. The Agent Communication Lan-
guage (ACL) stipulates what fields a message should
contain.
FIPA Interaction Protocols typify communica-
tion interactions among agents by specifying two
roles: initiator (the agent starting the interaction) and
responder (a participant in the interaction). Each pro-
tocol defines precisely which messages are sent by
each role and in which sequence.
In JADE, agent activity is programmed through
the notion of behaviours. For interaction protocols,
two complementing behaviours are used for each side
of the interaction, and JADEs API supports the most
important protocols with built-in initiator and respon-
der behaviours. Table 2 presents a mapping between
some FIPA interaction protocols and the classes that
implement them in JADE. The ones represented in
this table are also available in SAJaS.
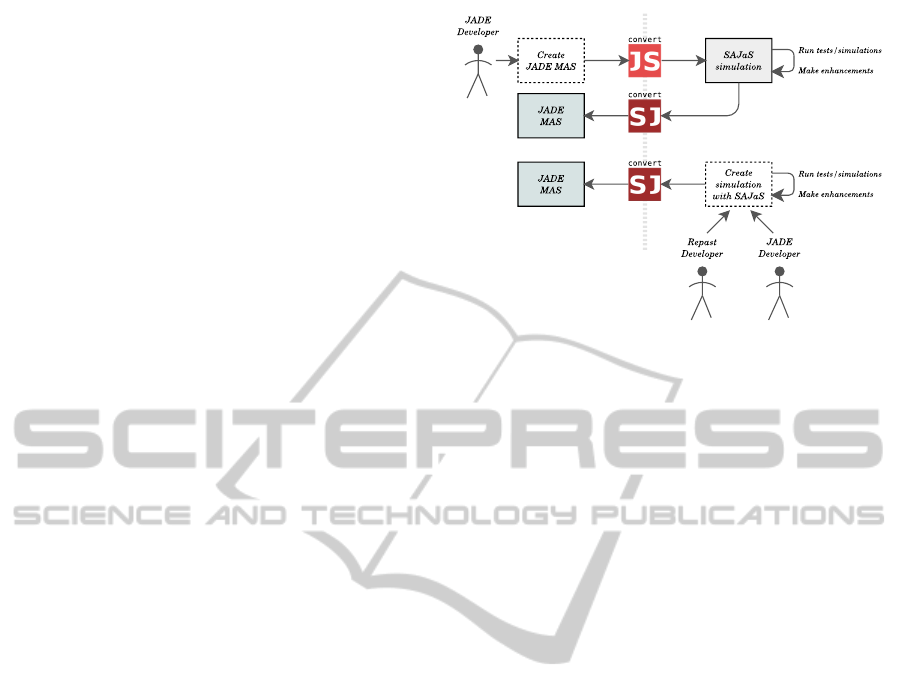
3.3 Usage Scenarios
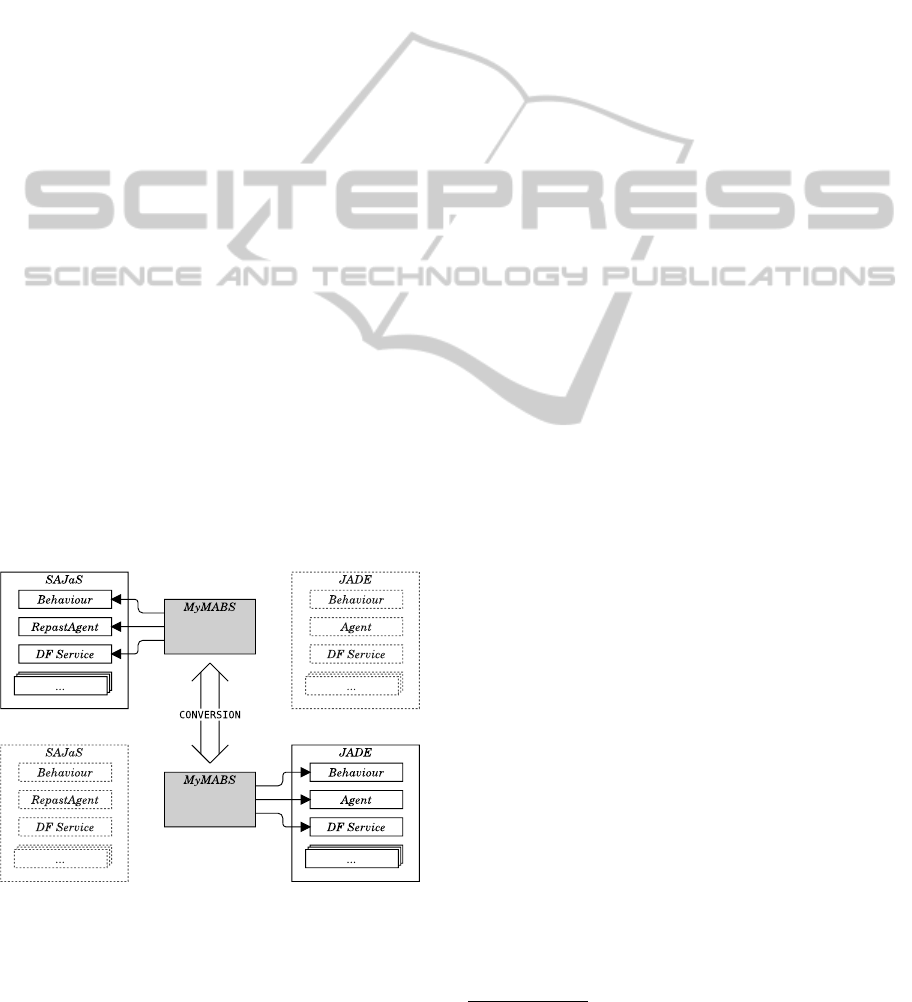
Figure 4 illustrates the scenarios where this system is
expected to be useful.
One possible scenario is when a JADE developer
creates a JADE MAS and desires to perform some
tests and simulations in a local and controlled envi-
ronment. The developer can use this tool to convert
the MAS into a MABS. Eventually, the application
can be converted back if changes were made while in
the simulation format.
A second possible scenario could be that of a de-
veloper that intends to create a MABS with the goal
of later creating a MAS out of it. This could be a
Repast developer who desires to create agent simula-
tions that take advantage of communication and agent
Figure 4: Possible work flows for SAJaS users. “SJ” and
“JS” represent conversion from SAJaS to JADE and the re-
verse, respectively.
management tools from MAS, or a JADE developer
that wants to create Repast simulations using familiar
JADE-like tools.
A third scenario is when a developer simply wants
to create a complex agent-based, FIPA-compliant
simulation. In this case, there is no need for a code
conversion tool, but SAJaS can be used as a stan-
dalone library.
The next sections detail both the SAJaS API and
the MASSim2Dev conversion tool.
4 SAJaS
From the point of view of the MAS programmer,
working with the SAJaS API feels the same as work-
ing with JADE, although limited to the presently
available features. However, SAJaS has a much sim-
pler internal architecture, which attempts to imple-
ment only the fundamental components needed for
everything else to work. The most evident feature that
was not ported from JADE was the network layer that
enables the creation of distributed MAS. The decision
of not including this JADE feature in SAJaS is based
on its negative effects on the performance of applica-
tions where agent interaction is very frequent.
The diagram in Figure 5 represents a simplified
version of SAJaS. Classes with a dotted border are in-
ternal and specific to SAJaS. All other classes are part
of the API. The BehaviourAction and the RepastA-
gent offer support to Repast. More specifically, the
BehaviourAction is responsible for interfacing Repast
Symphony and scheduling the execution of all be-
haviours.
Protocol initiators are behaviours that initiate the
communication, sending the first message. Respon-
ders start by waiting for this message to arrive. Be-
FromSimulationtoDevelopmentinMAS-AJADE-basedApproach
79
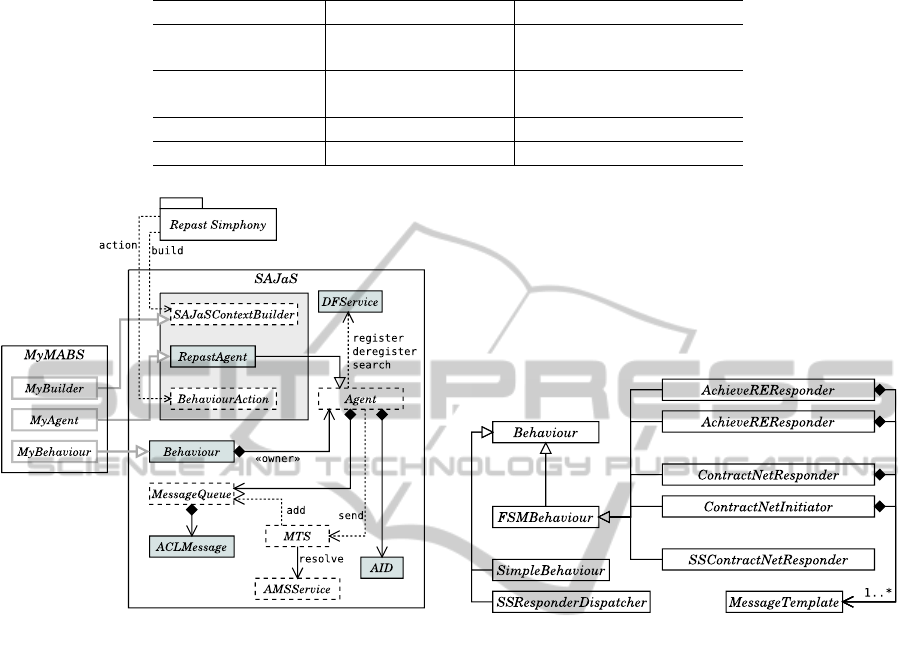
Table 2: Interaction protocols supported in JADE (adapted from (Bellifemine et al., 2007)).
Protocol(s) Initiator class Responder class
FIPA Request AchieveREInitiator AchieveREResponder
FIPA Query
FIPA Contract Net ContractNetInitiator ContractNetResponder
SSContractNetResponder
FIPA Propose Propose Initiator Propose Responder
FIPA Subscribe SubscriptionInitiator SubscriptionResponder
Figure 5: A simplified UML diagram of the architecture of
SAJaS.
cause protocols have states, each responder is able to
handle one conversation at a time. In JADE, a respon-
der restarts after the conversation has finished, thus
becoming ready to handle a new conversation. For
the ability to handle concurrent conversations, JADE
provides responder dispatchers, which may be used
to handle the first message of a protocol and create on
the fly an appropriate single session (SS) responder,
that is, a responder whose purpose is to handle a sin-
gle conversation. For this, JADEs API includes sin-
gle session versions of responders. Using this mecha-
nism, a variable number of responder behaviours may
be active at any point in time, one for each of ongoing
conversations.
SAJaS follows this same architecture of be-
haviours and protocols. The next section presents the
general structure of behaviours in SAJaS and JADE.
4.1 Behaviours
Figure 6 shows the implementation of behaviours in
SAJaS with more detail. The Behaviour superclass
contains methods that are triggered by certain events.
1. onStart is called immediately before the first call
to action
2. action is called once per tick
3. done is called every tick to determine if the be-
haviour has ended and if true is returned, it trig-
gers onEnd
4. onEnd is called right after the behaviour ended
Figure 6: Simplified UML class diagram for the behaviours
and protocols in SAJaS.
The methods action and done are abstract in
Behaviour, so other behaviours have to implement
it. Methods onStart and onEnd, though, are imple-
mented but do nothing in Behaviour.
The five “responder” and “initiator” classes imple-
ment the two protocols currently available in SAJaS.
The FSMBehaviour, which they extend, contains a
dynamic list of states and transitions. These can be
registered and unregistered at runtime, typically be-
fore initiating the behaviour or in its setup. Each state
is itself a behaviour.
Each protocol can be represented as a different
state machine. For instance, in a Contract Net, the
initiator’s state starts as “sending CFP”, then “wait-
ing for replies”, “waiting for result notifications” and
finally “finished”.
Internally, protocols in SAJaS use Java enums in-
stead of the FSM Behaviour from JADE to represent
their internal state machine. An enum is an immutable
variable type while the FSM is a dynamic structure.
The performance of enum-based and FSM-based pro-
tocol behaviours was compared and enum-based be-
haviours have shown to be significantly faster than
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
80
a dynamic FSM. The FSMBehaviour is available in
SAJaS to allow the creation of custom complex be-
haviours by programmers.
4.2 Agent Execution
JADE execution can be concurrent and parallel, since
JADE supports distributed and multi-threaded agent
systems. Execution in Repast, on the other hand, is
not concurrent. Repast uses a time-share type of ex-
ecution, granting each agent the right to perform its
tasks until they finish them, in sequence, but in no
particular order.
Except when executed during their setup or take-
down, agents’ actions in JADE are encapsulated in
Behaviours. In JADE, multiple agents can be exe-
cuting their behaviours simultaneously. In Repast,
however, all scheduled objects run consecutively with
variable execution sequence. This schedule is one of
the components in SAJaS that is specific to its Repast
interface.
Even though a local application can take advan-
tage of direct method invocation, when the simulation
platform is single-threaded - as Repast is - there is a
risk of the simulation stagnating if, for instance, two
agents engage in a very long “conversation”.
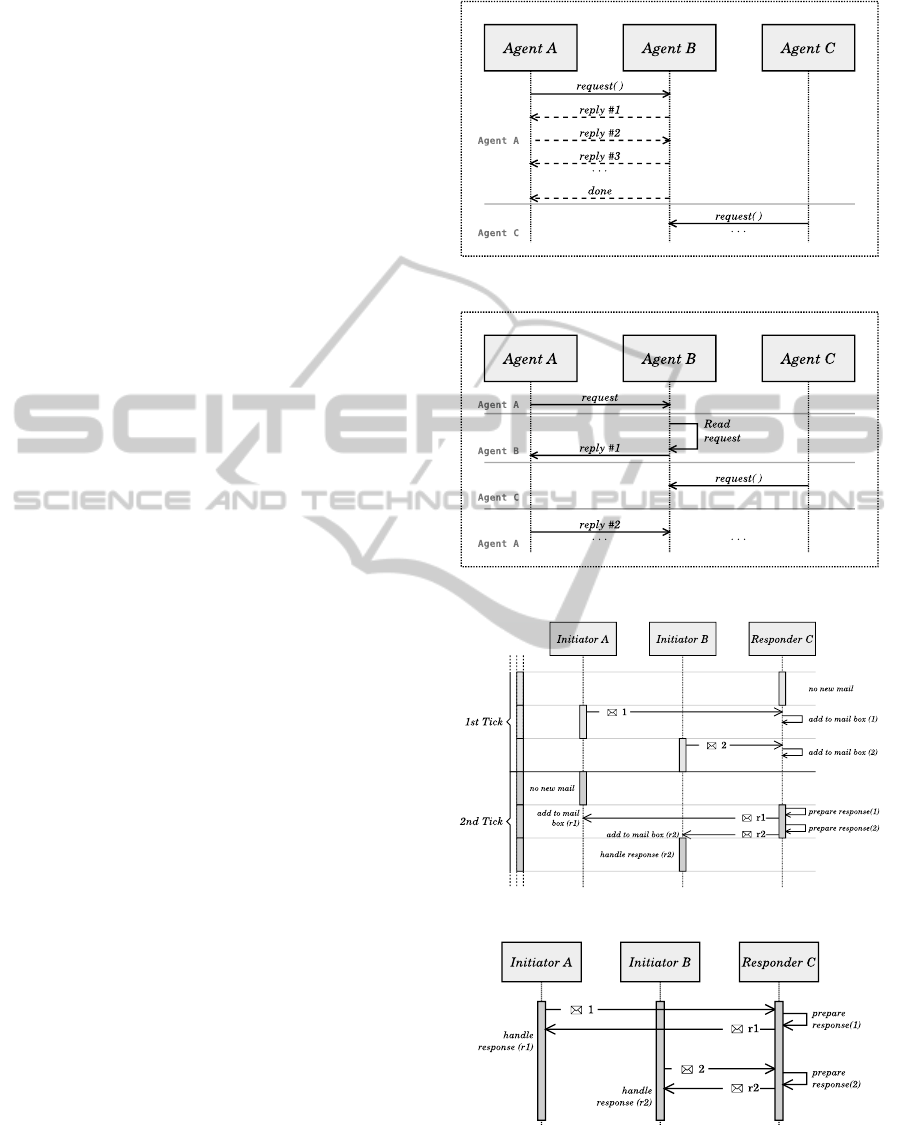
Figure 7 represents a scenario where two agents
engage in a conversation that involves multiple multi-
ple replies from both sides. With direct method invo-
cation, the response is instantaneous but other agents
do not get any time to execute in-between.
In Figure 8 on the other hand, each agent is al-
lowed to execute one task - send one message, in this
case. Messages stay waiting until the agent reads and
processes it. This way, Agent C did not have to wait
for the other two to finish.
In (Mengistu et al., 2008), authors concluded that
increasing the granularity of the system, it is possible
to improve its overall performance, even if individual
tasks are delayed. The granularity of an agent task
is explained as the communication-to-computation, or
“a measure of the amount of computation an agent
executes before entering the communication phase of
one simulation time step”.
In SAJaS, as in JADE, agent interaction occurs us-
ing the messaging service. Therefore, asynchronous
execution is appropriate for the kind of applica-
tions developed for JADE and SAJaS. Simulations in
Repast, though, usually depend on the synchrony of
the environment. The use of ACLMessages, which
wait in the message queue until processed, allows to
maintain a synchronous execution, while simulating
an asynchronous one.
To better demonstrate the differences between
Figure 7: Communication with direct method invocation.
Figure 8: Asynchronous communication.
Figure 9: Communication in SAJaS.
Figure 10: Communication in JADE, running in parallel.
agent execution in both frameworks, Figures 9 and
10 represents a scenario where two agents send a
message to a third one who then replies. In SAJaS
FromSimulationtoDevelopmentinMAS-AJADE-basedApproach
81
(Fig. 9), messages are delivered to agent C’s message
queue, and processed only in C’s turn. In JADE (Fig.
10), messages can arrive concurrently. Their arrival
triggers an event and they are processed right away
in the receiving agent’s thread. In this case, agent C
handles the messages as they arrive and issues the re-
spective replies.
It should be noted that agent behaviours are the
objects actually being scheduled, as each agent typ-
ically initiates multiple behaviours. The order by
which Repast executes each scheduled behaviour
should not be predictable: to remove the influence
that a fixed execution order can have in the outcome
of a simulation, the schedule is randomized every tick.
As a result, it is not guaranteed that all the behaviours
of a single agent are executed consecutively. This is
the expected execution when working with Repast as
well as with JADE (given its multi-threaded nature)
and it is up to the programmer to ensure that the ap-
plication does not rely on the order of execution.
5 MASSim2Dev
MASSim2Dev is an Eclipse plugin that makes use of
SAJaS. It acts as a translator that changes the MABS
dependencies from one platform to the equivalent
classes in the other platform (see Figure 11). After
conversion, no dependency to the previous platform
exists in the generated project, as long as the original
SAJaS simulation is not using internal components
from the SAJaS library, or the original JADE appli-
cation is not using elements from the JADE API that
are not yet implemented in SAJaS.
Figure 11: Representation of the conversion of code.
5.1 Plugin Execution
When the plugin is activated, it triggers a series of
actions.
1. Clone the selected project;
2. Change all references to SAJaS classes in class
imports;
3. Inject needed libraries in the new project and add
them to the build path;
4. Fix hierarchy (e.g classes that extended
RepastAgent must now extend Agent).
When the hierarchy needs to be fixed, it means
that the Java type name of the superclass is not
the same for JADE and SAJaS. Currently this oc-
curs solely for the Agent class. Throughout SA-
JaS’ code, all references to the agent use the abstract
type core.Agent. However, agent types in simu-
lations based on SAJaS+Repast always extend the
RepastAgent type.
To perform the mapping of the class imports be-
tween the frameworks, a dictionary file exists within
the plugin. It allows for quick upgrades to the tool
in the future without having to edit the actual code.
The dictionary contains annotations that inform how
to deal with the hierarchy fixing problem. It also con-
tains information about extra dependencies, such as
JADE and Repast libraries.
5.2 Code Conversion
There are multiple ways to tackle the problem of code
transformations. The brute force approach would be
to parse the source code, create an abstract syntax tree
(AST), which represents all code constructions in a
program, perform certain transformations in the tree,
and then generate back the code from the new AST.
Fortunately, there are free and open source projects
that developers can use to do exactly this with signif-
icantly reduced effort.
The Eclipse Java Development Tools (JDT)
3
used
to develop MASSim2Dev are a group of tools inte-
grated in the Eclipse IDE. Some of its most interest-
ing features are the automatic cloning of projects, the
handling of classes, imports, methods and fields as
objects and the possibility of doing complex manip-
ulation tasks without parsing the code. It does, how-
ever, allow the use of a high level AST for a more
direct manipulation of the source code. JDT is acces-
sible to plugin developers from within Eclipse.
6 VALIDATION
To validate both SAJaS and MASSim2Dev, a set of
experiments was designed, with the aim of covering
3
https://www.eclipse.org/jdt/
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
82
and testing all the available features. Table 3 summa-
rizes the aims of each experiment.
The first example consists of a simple contract net
between one buyer and multiple sellers. In the sec-
ond example, multiple contract nets run concurrently
and some of the buyers make use of available com-
putational trust about sellers. The third example is a
board game called Risk developed prior to the start of
this project. The goal of this last example was to test
SAJaS with an application that had not been devel-
oped specifically for this test, in order do demonstrate
that performance results obtained in JADE applica-
tions generated using MASSim2Dev were not caused
by faulty code generation.
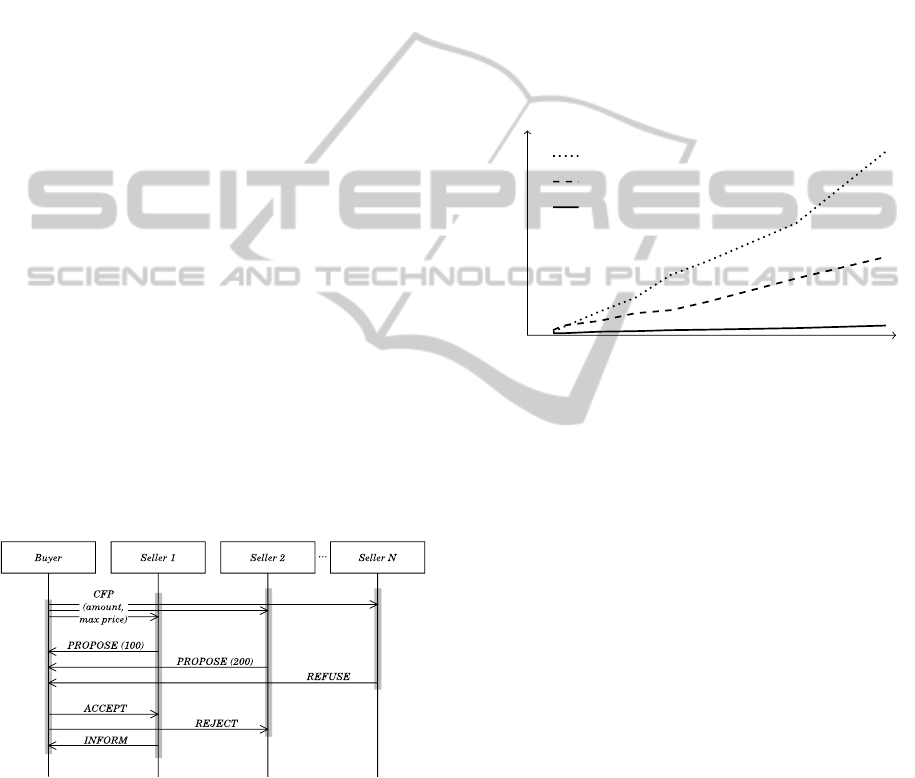
6.1 Simple Contract Net
In this scenario, an agent (the buyer) intends to pur-
chase a certain quantity of goods. The diagram in Fig-
ure 12 illustrates the interactions between the agents
in this scenario.
The buyer issues a call for proposals (CFP) con-
taining a request for supplies to all agents that an-
nounce themselves as suppliers in the DF. After re-
ceiving a CFP, the supplier replies with a PROPOSAL
containing a price for each product if the demanded
supply is within the seller’s capacity. Otherwise, a
REFUSE message will be sent to the buyer. Finally,
the buyer agent compares all valid proposals, chooses
the cheapest offer for each of the three products and
replies with an ACCEPT PROPOSAL to the best of-
fers, and REJECT PROPOSAL to all others.
Figure 12: Sequence of agents interaction in the simple con-
tract net scenario.
One of the difficulties of testing MABS is the po-
tential stochastic behaviour of agents in the simula-
tion, which makes it more difficult to obtain a clearly
defined result. This first validation scenario circum-
vents this problem, aiming instead at comparing sim-
ulation performance. To ensure the proper compari-
son of results between multiple runs of the experiment
and between runs in SAJaS and JADE, a predefined
data set was used in all executions. This experiment
focused on two simple metrics to evaluate the result:
execution time and outcome. After 10 executions,
the average performance of the experiment was cal-
culated for different numbers of agents, as shown in
Figure 13. The performance of the simulation based
on SAJaS was significantly better, excelling when the
number of agents is high. JADE was able to perform
better when using two distinct containers. The out-
come of this experiment consisted in identifying the
agent with the lowest bid and was known a priori.
As expected, in all executions with the same number
of agents, this result was identical in SAJaS and in
JADE.
Number of agents
100
200
300
400
500
750
1000
350
1050
1800
2550
Time (ms)
JADE (2 containters)
JADE (1 containter)
Repast using SAJaS
Figure 13: Average execution time on each framework in
each setup.
6.2 Multiple Contract Net
This scenario is composed of multiple buyers and sell-
ers running simultaneously. The diagram in Figure
14 illustrates one round of negotiation in this scenario
involving a single buyer. After searching the DF for
sellers of a given product, each buyer sends the list
of sellers to the CTAgent (CT standing for computa-
tional trust). The CTAgent keeps track of the sellers’
past contracts with buyers and provides information
on the top sellers in terms of successful contracts.
With this information, the buyer sends a CFP only
to the most trusted agents and accepts the best pro-
posal from them. Some sellers will occasionally vio-
late the contract after acceptance. The buyer will then
inform the CTAgent if the contract was fulfilled or vi-
olated.
Some buyers are programmed to ignore trust and
rely solely on the proposal. The premise is that
informed buyers eventually avoid contacting sellers
programmed to violate contracts more often. The goal
of this experiment is to model this scenario in SAJaS,
convert it to JADE and verify that the obtained results
are similar.
FromSimulationtoDevelopmentinMAS-AJADE-basedApproach
83
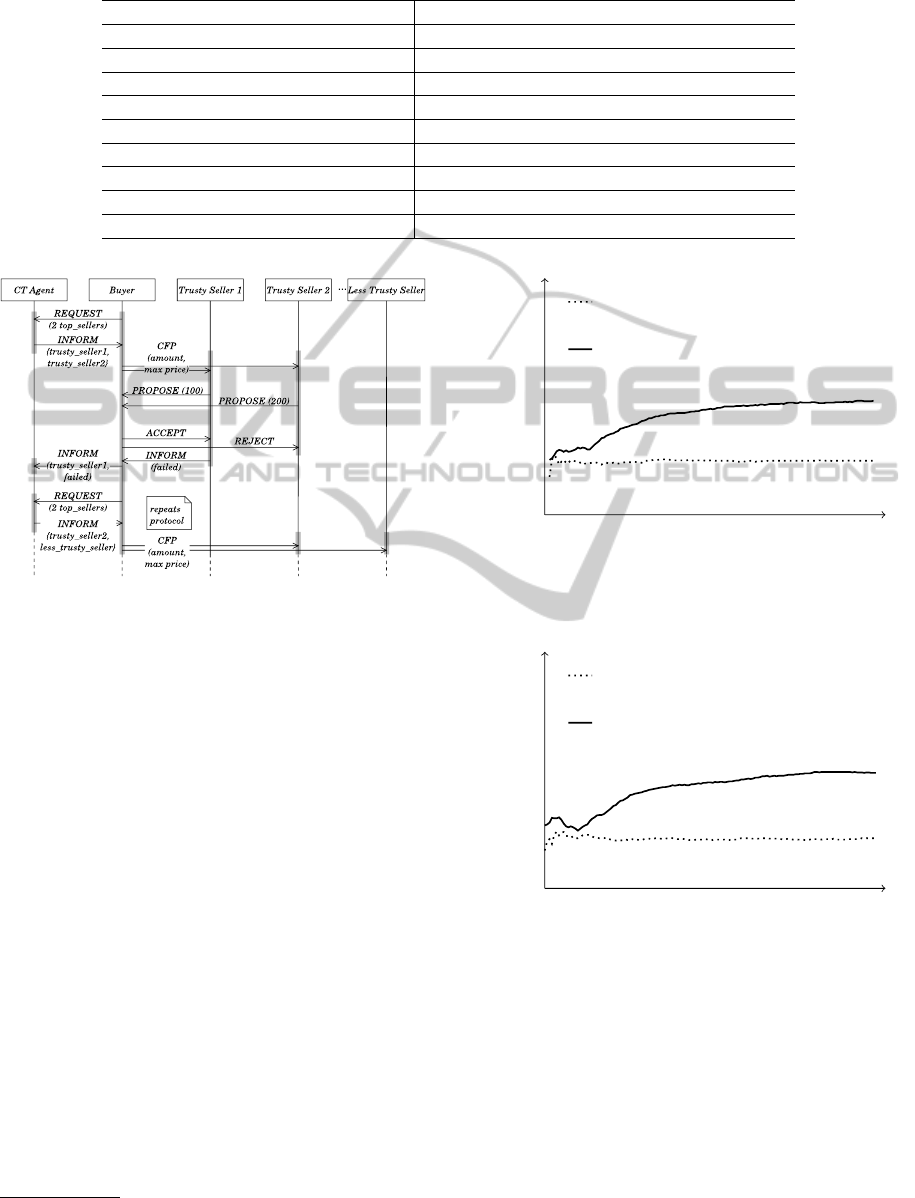
Table 3: Features covered by each experiment.
Simple CNet Multiple CNet Risk Game
ACL, DF, MTS, AMS, Behaviours X X X
Contract Net Protocol X X
Achieve RE Protocol X X
SS Contract Net Protocol X
FSM Behaviour X
Simple Behaviour X
Responder Dispatcher X
SAJaS to JADE Conversion X X
JADE to SAJaS Conversion X
Figure 14: Sequence of agents interaction in the simple con-
tract net scenario.
The experiment was executed 5 times in JADE
and 5 times in SAJaS. The scenario is composed of
20 buyers using computational trust, 20 not using
trust and 80 sellers. A total of 2000 contracts were
recorded to create the charts in Figures 15 and 16.
Unlike in the first example, this one included non de-
terministic elements (the sellers’ bids). The compar-
ison of the results was made by analysing the charts.
As shown, buyers who made use of computational
trust obtained increasingly more successful contracts.
The fluctuations early in the simulation are due to the
initial lack of trust information. As expected and as
shown in the charts, a similar outcome was observed
both in JADE and SAJaS.
6.3 RISK Board Game
RISK is a multi-player strategy board game played in
turns. It is a game currently owned by Hasbro and the
full rules manual is available online
4
. The game used
for this experiment was developed with JADE before
the conception of the project described in this paper.
The game is played automatically by agents, compet-
4
http://www.hasbro.com/risk/
Number of Contracts
0 500 1000 1500 2000
% of fulfillment
0.25
0.50
0.75
1.00
Using trust and proposal
Using only the proposal
Figure 15: Average result of 5 executions of the Multiple
Contract Net scenario during 2000 contracts in JADE.
Number of Contracts
0 500 1000 1500 2000
% of fulfillment
0.25
0.50
0.75
1.00
Using trust and proposal
Using only the proposal
Figure 16: Average result of 5 executions of the Multiple
Contract Net scenario during 2000 contracts in SAJaS.
ing against each other for the conquest of a map that
loosely resembles a world map and its regions.
Player agents have different behavioural architec-
tures and are classified as aggressive, defensive, op-
portunistic or random. Communication occurs be-
tween the players and the game agent using the FIPA
REQUEST protocol. The game also heavily relies
on custom Finite State Machine Behaviours (FSM-
Behaviour) to control game progress. To evaluate the
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
84
performance of the game, logging features were intro-
duced to the original source code of the application.
Other than that, no other changes were made to the
original code.
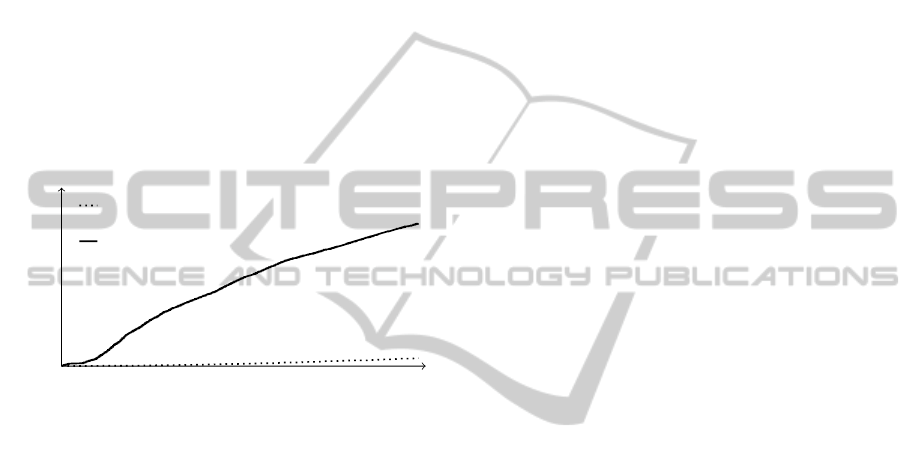
For this experiment, a match with 5 “random
agents” was setup. Random agents do not follow any
particular strategy of attack, defense or soldier distri-
bution and a game with only random agents is always
never-ending. To analyze the overall performance of
the agent system, the game was converted from JADE
to SAJaS using MASSim2Dev. The experiment was
then repeated 5 times during 8 seconds and the num-
ber of game rounds was registered. The chart in Fig-
ure 17 shows that SAJaS was capable of executing
many more rounds in the same period. The GUI of
the game made it possible to assure that the game was
executing correctly.
Time/s
1 2 3 4 5 6
7
8
# of Rounds
30
60
90
120
SAJaS
JADE
Figure 17: Performance of a Risk match with 5 random
agents.
7 CONCLUSIONS
To bridge the gap between MAS development and
simulation, SAJaS was created in order to allow
JADE developers to create Repast-based simulations
using familiar JADE features. MASSim2Dev was
also developed to enable the conversion of simula-
tions created with SAJaS into JADE MAS.
The main advantage of using SAJaS over the so-
lutions studied in the related work is the ability to run
simulations that do not need JADE at runtime, rely-
ing on Repast only. JADE is a very rich platform
for the development of agent systems distributed in
a network, but its architecture quickly becomes a per-
formance hog as the number of agents in a system
rises. Therefore, Repast was presented as a viable al-
ternative to serve as the base for complex but scal-
able agent-based simulations. A conscious effort was
made to keep a clear separation within SAJaS be-
tween Repast-specific elements and the core of this
API.
Three tests were designed to validate the results of
this paper. Technically, the scenarios covered all fea-
tures currently available in SAJaS. The Achieve RE
protocol was used in the Multiple Contract Net sce-
nario to communicate with the CTAgent and it was
widely used in Risk for all communications. The
Contract Net protocol was covered in the first two ex-
periments. The Multiple Contract Net scenario also
allowed multiple concurrent contracts to take place
by using the Responder Dispatcher. The creation of
custom Simple Behaviours and Finite State Machine
(FSM) Behaviours was covered by the Risk example
scenario. This feature is also important for the cre-
ation of more custom protocols or any kind of agent
behaviour.
All scenarios made use of the DF, AMS and MTS
services, as well as structures like the ACL Message,
Message Template, DF Agent Description and Ser-
vice Description. All these JADE-based facilities and
structures are widely used in JADE-based applica-
tions.
It was possible to demonstrate that bringing JADE
and Repast together is not only feasible using the
developed tools, but also provides increased perfor-
mance when compared with a JADE MAS. Further-
more, our results show that, even though only a sub-
set of the protocols and features from JADE are im-
plemented in SAJaS, it is already possible to create
simulations with a reasonable degree of complexity.
SAJaS and MASSim2Dev are meant to be developed
in the future and released to the academic community
for further development, discussion and use.
8 FUTURE WORK
SAJaS and MASSim2Dev already provide program-
mers with the means to develop MABS with some
complexity. There is, however, still room for devel-
opment and future enhancements, both in SAJaS and
MASSim2Dev.
The most immediate extension to this project is to
enlarge the range of supported JADE features present
in SAJaS. While it is important to keep the simplicity
of SAJaS’s internals in order to maintain good simula-
tion performance, more elements from the JADE API
can be implemented in SAJaS. The core of SAJaS al-
lows to easily extend the API with more interaction
protocols and other types of behaviours. Furthermore,
SAJaS’ modularity allows future extensions without
changing the API and opens doors to future integra-
tion with other simulation tools.
One interesting feature in Repast is the ability
to create real time visualizations of simulation data.
This is possible in part because agents in Repast are
FromSimulationtoDevelopmentinMAS-AJADE-basedApproach
85

executed locally, so access to this data is facilitated. It
could be interesting to include data collection and dis-
play tools that could be ported between frameworks,
taking advantage of MASSim2Dev.
Possible enhancements to the plugin could include
providing support for user configurations like the se-
lection of the name and location of the newly gener-
ated project, conversion of individual classes and the
automatic creation of “stub launchers” that would al-
low to quickly test if the generated project executes
correctly.
Finally, future projects could enrich the SAJaS
platform by creating new frameworks for different
simulation tools. While SAJaS core takes care of the
agent model and communication and other function-
alities as described in this paper, a simple independent
module takes care of interfacing with Repast. It is
possible to create new modules to interface with other
simulation tools. Such modules should implement the
following features:
• Contain a structure that organizes all the be-
haviours from all agents;
• Allow the adition of new behaviours to the
pool and initiate them by calling the appropriate
method (“onStart”);
• Allow the removal of behaviours from the pool
and terminate them by calling the appropriate
method (“onEnd” and “done”);
• Schedule each behaviours’ execution by calling
the “action” method on each behaviour – SAJaS’
Repast interface does this sequentially, but other
frameworks could do it concurrently, for instance.
The development of manuals for the implemen-
tation of such interface modules is already underway,
as is the organization of all project documentation and
source code.
REFERENCES
Ahlbrecht, T., Dix, J., K
¨
oster, M., Kraus, P., and M
¨
uller, J. P.
(2014). A scalable runtime platform for multiagent-
based simulation. Technical report, Technical Report
IfI-14-02, TU Clausthal.
Allan, R. (2009). Survey of agent based modelling and sim-
ulation tools. BT Technology Journal.
Balmer, M., Meister, K., Rieser, M., Nagel, K., Axhausen,
K. W., Axhausen, K. W., and Axhausen, K. W. (2008).
Agent-based simulation of travel demand: Structure
and computational performance of MATSim-T. ETH,
Eidgen
¨
ossische Technische Hochschule Z
¨
urich, IVT
Institut f
¨
ur Verkehrsplanung und Transportsysteme.
Bellifemine, F. L., Caire, G., and Greenwood, D. (2007).
Developing multi-agent systems with JADE, volume 7.
John Wiley & Sons.
Collier, N. (2003). Repast: An extensible framework for
agent simulation. The University of Chicagos Social
Science Research, 36.
D
´
avila, J. and Uzc
´
ategui, M. (2000). Galatea: A multi-
agent simulation platform. In Proceedings of the In-
ternational Conference on Modeling, Simulation and
Neural Networks.
Garc
´
ıa, E., Rodr
´
ıguez, S., Mart
´
ın, B., Zato, C., and P
´
erez,
B. (2011). Misia: Middleware infrastructure to sim-
ulate intelligent agents. In International Symposium
on Distributed Computing and Artificial Intelligence,
pages 107–116. Springer Berlin Heidelberg.
Gormer, J., Homoceanu, G., Mumme, C., Huhn, M., and
Muller, J. (2011). Jrep: Extending repast simphony
for jade agent behavior components. In Proc. 2011
IEEE/WIC/ACM Int. Conf. on Web Intelligence and
Intelligent Agent Technology, Vol. 02, pages 149–154.
IEEE Computer Society.
Krajzewicz, D., Erdmann, J., Behrisch, M., and Bieker,
L. (2012). Recent development and applications of
SUMO - Simulation of Urban MObility. Int. J. on Ad-
vances in Systems and Measurements, 5:128–138.
Mengistu, D., Troger, P., Lundberg, L., and Davidsson, P.
(2008). Scalability in distributed multi-agent based
simulations: The jade case. In 2nd Int. Conf. on Future
Generation Communication and Networking Sym-
posia (FGCNS’08), volume 5, pages 93–99. IEEE.
Nikolai, C. and Madey, G. (2009). Tools of the trade: A
survey of various agent based modeling platforms. J.
of Artificial Societies & Social Simulation, 12(2).
O’Brien, P. and Nicol, R. (1998). Fipatowards a standard for
software agents. BT Technology Journal, 16(3):51–59.
Tisue, S. and Wilensky, U. (2004). Netlogo: A simple en-
vironment for modeling complexity. In International
Conference on Complex Systems, pages 16–21.
Warden, T., Porzel, R., Gehrke, J. D., Herzog, O., Langer,
H., and Malaka, R. (2010). Towards ontology-based
multiagent simulations: The plasma approach. In 24th
European Conf. on Modelling and Simulation (ECMS
2010). European Council for Modelling and Simula-
tion, pages 50–56.
Wooldridge, M. (2008). An introduction to multiagent sys-
tems. Wiley. com.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
86
