
The Art of Balance
Problem-Solving vs. Pattern-Recognition
Martyn Lloyd-Kelly
1
, Fernand Gobet
1
and Peter C. R. Lane
2
1
Department of Psychological Sciences, University of Liverpool, Liverpool, L69 3BX, U.K.
2
School of Computer Science, University of Hertfordshire, College Lane, Hatfield, AL10 9AB, U.K.
Keywords:
Agents, Simulation, Dual-process Theory, Reinforcement Learning, Pattern Recognition, Chunking.
Abstract:
The dual-process theory of human cognition proposes the existence of two systems for decision-making: a
slower, deliberative, “problem-solving” system and a quicker, reactive, “pattern-recognition” system. The
aim of this work is to explore the effect on agent performance of altering the balance of these systems in
an environment of varying complexity. This is an important question, both in the realm of explanations of
expert behaviour and to AI in general. To achieve this, we implement three distinct types of agent, embodying
different balances of their problem-solving and pattern-recognition systems, using a novel, hybrid, human-
like cognitive architecture. These agents are then situated in the virtual, stochastic, multi-agent “Tileworld”
domain, whose intrinsic and extrinsic environmental complexity can be precisely controlled and widely varied.
This domain provides an adequate test-bed to analyse the research question posed. A number of computational
simulations are run. Our results indicate that there is a definite performance benefit for agents which use a
mixture of problem-solving and pattern-recognition systems, especially in highly complex environments.
1 INTRODUCTION
The notion of a “dual-process” cognitive system
proposes that human-beings are equipped with two
systems capable of creating, retrieving and using
“productions” (a prescribed action for a particular
environment state) to achieve the agent’s relevant
goal(s) (Evans, 2008; Sloman, 1996). Psycholog-
ical validity of this system is buttressed by human
experimental evidence (de Wit and Dickinson, 2009;
Gillan et al., 2011) and implementations in compu-
tational cognitive architectures designed to emulate
and explain human cognition (Sun et al., 2005). Dual-
process system theory suggests that a person may ei-
ther use a formal logic-like “problem-solving” system
that is slow and deliberative or a quicker “pattern-
recognition” system that uses judgments of pattern
similarity to try and solve the issue at hand (Sloman,
1996). Tension between use of problem-solving and
pattern-recognition to solve problems has been iden-
tified by many (Hesketh, 1997; Zeitz, 1997), result-
ing in the proposal that domain experts are inflexi-
ble problem-solvers, since they are so entrenched in
tried-and-tested paradigms (Sternberg, 1996; Simon-
ton, 1999). This has been proven to be true, but
only to a certain degree of expertise; once an above-
average level of knowledge has been acquired about
a domain, the so-called “Einstellung Effect” is re-
moved (Bilali
´
c et al., 2008).
An analysis of the potential effects on perfor-
mance by weighting the usage of these systems in
particular complexities of a stochastic environment
is lacking, however. So, in this paper, we pro-
vide a quantitative investigation into what balance
of problem-solving and pattern-recognition is most
effective when these systems are encapsulated in a
human-like computational architecture of cognition,
situated in an environment whose complexity can
vary considerably and where precise compile-time
prescriptions of optimal action selection using tech-
niques such as Markov Decision Processes are im-
plausible. We will compare three ways of mak-
ing decisions: pure problem solving, pure pattern-
recognition and a mixture of the two methods. Our
results are especially interesting for those who intend
to design robust, effective systems capable of learn-
ing information autonomously and making use of this
information to improve decision-making quality dur-
ing run-time in reactive, sequential decision-making
tasks.
Section 2 discusses the simulation environment
in detail and justifies its applicability, whilst section
131
Lloyd-Kelly M., Gobet F. and C. R. Lane P..
The Art of Balance - Problem-Solving vs. Pattern-Recognition.
DOI: 10.5220/0005215901310142
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 131-142
ISBN: 978-989-758-074-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

3 presents a relevant overview of human cognition,
and discusses the computational architecture in detail.
Section 4 covers the implementation details of the
agents, before section 5 outlines the simulations run
to gather data to answer the research question posed.
Section 6 provides details of the results obtained and
a discussion of how these results may have emerged.
The paper concludes with section 7, containing the
salient points raised by the simulation results, their
implications for the current state of the art, and some
future directions of research.
2 SIMULATION ENVIRONMENT
Agents are situated in the Tileworld environ-
ment (Pollack and Ringuette, 1990), which typically
comprises a two-dimensional grid of homogeneously-
sized squares containing a number of tiles, holes and
agents that exist for a finite period of time. An agent’s
main goal is to push tiles into holes, earning the agent
a reward. The actions and goal achievement of agents
are episodic and delayed since, in some cases, the
agent’s goal will not be achieved by performing one
action; several may be required. Only one tile can be
pushed at any time by an agent. For example, if an
agent has two tiles to its east on consecutive squares,
it is not able to push the tile closest to itself east since
it is blocked by the tile two squares to the east. Ex-
plicit obstacles have not been included since a square
can only be occupied by one tile, hole or agent at any
time so these objects act as natural obstacles.
Tileworld’s intrinsic and extrinsic environmental
complexity can be precisely controlled by modifying
certain parameter values. Extrinsic complexity can be
altered by increasing/decreasing the number of play-
ers present in the environment whilst intrinsic com-
plexity is controlled by parameters that define when
new tiles and holes can be created, the probability of
a new tile or hole being created and how long these
artifacts exist for before being removed.
Depending upon the size of a Tileworld, the over-
all complexity of the environment can be prodigious.
The total number of states possible in a simplified ver-
sion of Tileworld consisting of a total of n squares,
one agent and only holes (no tiles or obstacles) is
n · 2
n
. The base 2 in the 2
n
expression term is de-
rived from the fact that squares may be empty or
occupied by at most, one environment object. Op-
timal policy calculations for a computer with rea-
sonable resources using a Markov Decision Process
(hereafter referred to as MDP) in this simplified ver-
sion of Tileworld becomes intractable when n = 16,
or n = 25 (Simari and Parsons, 2004). In comparison,
our Tileworld is a two-dimensional grid that “wraps”
(grid edges are not strict boundaries), n = 1225 and
there are 4 classes of objects that an agent may en-
counter: another agent, a tile, a hole and an empty
square, resulting in 1225·4
1225
possible states. We as-
sert that this spectrum of complexity and the ability to
exert fine-grained control over parameters that man-
age this complexity bestows a suitable environment to
analyse what balance of problem-solving and pattern-
recognition system use maximises agent performance
given differing degrees of environmental complexity.
3 COGNITIVE ARCHITECTURE
In studying human cognition, much scrutiny has been
focused upon explaining expert behaviour in complex
domains; chess, in particular, has benefited from an
investment of such effort. Research of this type has
identified that the difference in performance between
chess masters and amateurs does not hinge upon
mental ability (search space depth differs only min-
imally between masters and amateurs, for example)
but rather on the breadth and quality of knowledge
possessed by masters (de Groot and Gobet, 1996).
The total amount of information in chess has
been calculated to contain 143.09 bits of informa-
tion (Jongman, 1968) or 10
43
positions (2
143.09
).
However, some of these positions are redundant or
implausible; rectified calculations give a total space
of 50 bits of information or 10
15
positions (de Groot
and Gobet, 1996). One of the most promising theories
that accounts for the ability of chess masters to learn
and retain such large
1
databases of information, given
known limitations on human cognition is chunking
theory. Chunking suggests that aggregated environ-
mental information or “chunks” (Chase and Simon,
1973) are used to store and improve new or exist-
ing information in memory. Computational cognitive
models that implement chunking have closely mim-
icked the behaviour of humans in numerous domains
(see section 3.1 for details).
With regard to decision-making, chess masters
demonstrate a penchant for pattern-recognition; mas-
ters will recognise key features of certain board con-
figurations extremely quickly (de Groot, 1978) and
use typical moves despite the existence of other
relatively uncommon solutions that are more opti-
mal (Saariluoma, 1994; Bilali
´
c et al., 2008). This
would indicate that when an adequate knowledge base
exists for the current domain, pattern-recognition is
the preferred modus operandi for action selection.
1
With respect to both the number of positions and the
amount of information in each position.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
132

However, given that there may exist many possible
solutions for a particular situation, how are actions se-
lected using pattern-recognition?
One proposal is that productions are assigned op-
timality ratings by a process akin to reinforcement
learning (Sutton and Barto, 1998) whose presence in
human cognition has been extensively validated (Erev
and Roth, 1998; Holroyd and Coles, 2002). These
ratings reflect an assessment of “rationality”: non-
optimal productions should be suppressed more than
optimal ones (Miyazaki et al., 1994). When applied to
domains like Tileworld, where an agent’s actions and
goal achievement are episodic, rating production opti-
mality entails “discounted rewards”: productions exe-
cuted closer to the time a reward for goal achievement
is received are assigned greater shares of the reward
than actions performed further in the past according to
a discount factor β, (0 < β < 1) (Grefenstette, 1988).
These reward shares are then usually translated di-
rectly into optimality ratings. Human production se-
lection is also non-deterministic; a maximally optimal
production is not guaranteed to be selected given sev-
eral less optimal alternatives (Raza and Sastry, 2008;
Dayan and Daw, 2008).
Consequently, we have combined the CHREST
architecture (Gobet, 1993; de Groot and Gobet, 1996)
with the “Profit Sharing with Discount Rate” (PSDR)
reinforcement learning theory (Arai et al., 2000) and
the “Roulette” selection algorithm (Baker, 1987);
These elements are discussed further in sections 3.1,
3.2 and 3.3.
3.1 CHREST
CHREST is an example of a symbolic computa-
tional architecture (Samsonovich, 2010) and is the
foundation of the cognitive architecture implemented
in this paper. CHREST uses chunking to create
well-organised, extensible knowledge-bases to al-
low human-like storage and retrieval of memory.
CHREST also provides functionality to create pro-
ductions by forming links between chunks and is
capable of storing optimality ratings for produc-
tions by associating numeric values with these links.
CHREST’s validity as a theory of human-like cogni-
tion has been proven in a variety of domains, includ-
ing board games (de Groot and Gobet, 1996) , implicit
learning (Lane and Gobet, 2012) and natural language
acquisition (Freudenthal et al., 2009) .
The version of CHREST used comprises two main
components: short-term memory (STM) and long-
term memory (LTM) which use “patterns” as input
that can be combined to produce chunks. Patterns and
chunks are created and interpreted by an agent’s in-
put/output component (discussed in section 4.1) and
are stored in LTM according to their specified modal-
ity: action, visual or verbal
2
.
LTM is composed of a discrimination network that
acts as a retrieval device and a similarity function; its
role is analogous to the hidden layers of a connec-
tionist network, or the RETE network of Soar (Laird,
2012). Chunks are stored within nodes that are con-
nected using test links, with a chunk input to LTM,
θ, used as a test. The network is traversed by sort-
ing θ from the root node along matching test links
until a leaf node is reached or no further test links
match. If θ does not match the chunk retrieved from
the node reached after traversal, ϑ, the discrimination
network is modified using one of two learning mech-
anisms. If θ contains patterns that are common to ϑ
along with some additional patterns, then CHREST
attempts to add one of these new patterns to ϑ – this
operation is called familiarisation, and increases the
size of chunks. If θ contains different information
than ϑ then a new test link is added, using some of the
different information in θ to form the test – this oper-
ation is called discrimination, and increases the num-
ber of chunks stored in LTM. More details of these
learning mechanisms can be found in earlier publica-
tions (Gobet et al., 2001; Lane and Gobet, 2012).
STM consists of two fixed-length first-in-first-out
lists of action and visual modality. When actions
are performed in response to visual states, the rel-
evant action and visual patterns are retrieved from
STM and paired to create an “episode” (created by
an agent’s input/output component, see section 4.1).
These episodes are stored in a fixed-length first-in-
first-out “episodic memory” that enables correct op-
eration of the PSDR reinforcement learning theory
(discussed in section 3.2) and the ability to create
and modify productions in LTM. Productions are im-
plemented using hash map data structures contained
in visual nodes only; keys contain pointers to action
nodes and values denote the optimality rating of the
production. Productions always begin at visual nodes
and point to action nodes since actions are always pro-
duced in response to vision. Two broad types of pro-
ductions can exist in LTM: productions containing a
visual chunk and an explicit action chunk and produc-
tions containing a visual chunk and an action chunk
that prescribes usage of the problem-solving system.
Differences in how these two production types are
handled creates the three different agent types (see
section 4.4) mentioned.
The time taken to familiarise, discriminate and
add productions can be set at run-time; note that per-
forming one these processes blocks performance of
2
Chunks of verbal modality are not utilised here.
TheArtofBalance-Problem-Solvingvs.Pattern-Recognition
133

others. This means that learning is slow at first but
increases as the agent interacts more with the envi-
ronment to create a very human-like model of cogni-
tion. Furthermore, attempts to create productions that
already exist are ignored.
3.2 Profit Sharing with Discount Rate
PSDR was chosen as a reinforcement learning the-
ory for three reasons: first, it can be used in domains
where mathematical modeling of the domain is in-
tractable (a property of the version of Tileworld im-
plemented). Second, PSDR is rational in the sense
defined earlier since it implements the notion of dis-
counted rewards. Third, PSDR’s effectiveness in en-
abling rational production optimality rating has been
validated by others (Arai et al., 2000) whose aim is to
grant agents with the ability to autonomously learn ro-
bust and effective productions in uncertain, dynamic,
multi-agent domains, similar to the version of Tile-
world used here.
PSDR uses a “credit assignment function” (see
equation 1) to calculate production optimality ratings,
P
σ
. For example: at time t, an agent executes an ac-
tion in response to the current environment state gen-
erating a production, P
t
. At time t + 1, the agent ex-
ecutes another action in response to the current en-
vironment state, producing another production, P
t+1
,
and continues this cycle until it receives a reward,
R, at time T . At time T , the agent’s episodic mem-
ory will contain the following (simplified) contents:
(P
t
,P
t+1
,...P
T
). If R = 1 and the discount rate β = 0.5,
P
T
receives 1 as credit, P
T −1
, receives 0.5 as credit,
P
T −2
receives 0.25 as credit etc. The credit generated
for a production is then added to that production’s cur-
rent optimality rating.
P
σ
= P
σ
+ (R · β
T −t
,(0 < β < 1)) (1)
3.3 Roulette Algorithm
The Roulette algorithm uses production optimality
ratings generated by PSDR and stored by CHREST,
to select an action for execution given a state of the
environment. Equation 2, generates a value, ω, for
a candidate production, P, from P’s optimality rat-
ing, P
σ
, divided by the sum of each candidate pro-
duction’s optimality rating, P
n
σ
to P
N
σ
. Candidate pro-
ductions are then ordered according to ω, from low-
est to highest, and used to create a range of val-
ues where productions with greater ω values occupy
greater ranges. Finally, a random number, R, is gen-
erated where 0 < R < 1 and used to select a produc-
tion. Therefore, productions with greater optimality
ratings will have a larger ω and therefore, a greater
probability of being selected. Other candidate pro-
ductions still have a chance of being selected hence,
the algorithm is non-deterministic.
ω = P
σ
/
N
∑
n=1
P
n
σ
(2)
4 AGENT IMPLEMENTATION
The agents implemented are endowed with a combi-
nation of the cognitive architecture described in sec-
tion 3 with an input/output component separate from
the cognitive architecture. Agents are goal-driven,
are not capable of communicating or explicitly co-
operating with one another to achieve these goals and
can only see a limited portion of the total environ-
ment. Agent sight is controlled by a parameter that
takes a number as input to indicate how many squares
north, east, south and west the agent can “see”. We
keep the value of this parameter constant at 2 since
agent performance should not be affected by differ-
ences in “physical” capabilities and this value lim-
its visual input. This is important since larger val-
ues may result in the agent constantly learning (this
blocks other mental processes, see section 3.1). Lim-
iting agent sight to 2 squares also allows the agent to
see past a tile so that its ability to be pushed can be
determined.
Given the research discussed in section 3,
problem-solving and pattern-recognition systems are
never active simultaneously. After observing the cur-
rent state of the environment, the pattern-recognition
system is consulted first; if no actions are proposed
by this system, the problem-solving system is used
instead. Implementing system usage in this way clas-
sifies the dual-process system implemented as “mod-
ular” (Lane and Gobet, 2012) and extends CHREST’s
existing functionality.
Figure 1 illustrates how the major components in
the agent architecture are connected. The operation of
the input/output component is outlined in section 4.1
before the problem-solving and pattern-recognition
systems are discussed in sections 4.2 and 4.3, respec-
tively. Agent types are then delineated in section 4.4
and the main execution cycle for agents is provided in
section 4.5.
4.1 Input/Output Component
Since agents use CHREST and are situated in a par-
ticular environment, the ability to encode and inter-
pret CHREST compatible chunks is required; such
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
134

Figure 1: Agent Architecture.
functionality is provided by an agent’s input/output
component. Visual chunks are produced by the in-
put element of the input/output component and are
sent to LTM, action chunks are sent from the problem-
solving or pattern-recognition system to the output el-
ement of the input/output component and are trans-
lated into operations that the agent can execute.
Visual and action chunks are composed of three-
item tuples called “item-on-square” patterns that con-
tain an identifier string and two numbers. For visual
patterns the identifier string represents Tileworld ob-
jects (“T” for tile, “H” for hole and “A” for other
agents), while the first and second numbers represent
how many squares to the north and east of the agent
the object is, respectively
3
. The visual pattern < [T
1 2] > states that there is a tile (T) located 1 square
north (1) and 2 squares east (2) of the agent’s current
location. For action patterns, the identifier string rep-
resents an action (“MR” for move-randomly, “MAT”
for move-around-tile, “MTT” for move-to-tile, “PT”
for push-tile and “RS” for remain-stationary), while
the two numbers represent the compass direction the
agent should face (0: north, 90: east etc.) and the
number of squares that should be moved by the agent
and/or tile, respectively. For example, the action pat-
tern < [PT 90 1] > states that the agent should face
east (90) and push the tile there (PT) 1 square (1) in
that direction.
Episodes (see section 3.1) are also encoded by
an agent’s input/output component and contain four
pieces of information: a visual-pattern, υ, an action-
pattern, α (executed by the agent in response to υ),
the time α was executed (required by PSDR, see sec-
tion 3.2) and whether α was produced by the problem-
solving or pattern-recognition system (enables correct
operation of pattern-recognition system variations,
see section 4.3). If an agent saw a tile 1 square to the
north ([T 1 0]) and used its problem-solving system
(true) to generate a push tile north by 1 square ac-
3
South and west are represented by negative numbers.
tion ([PT 0 1]) that was executed at time 110 (110),
the episode created would be: [ [T 1 0] [PT 0 1]
110 true ].
4.2 Problem-solving System
The problem-solving system takes visual chunks as
input and generates action chunks that are used as
input to the agent’s LTM to initiate learning and to
the agent’s input/output component so it can be con-
verted into executable instructions so the agent can
act. Action chunks generated by the problem-solving
system are intended to achieve the agent’s currently
active goal. However, an agent’s goals are not explic-
itly represented in any data structure available to the
agent. Therefore, the goal to be achieved is inferred
by analysing the information contained in a visual-
pattern that is passed as input. The result of this anal-
ysis is used to run one of three hand-coded proce-
dures: “move-randomly”, “secure-tile” or “push-tile-
to-hole”.
Note that we have conflated the concepts of “goal”
and “environment state” because actions produced by
the problem-solving system are used to create pro-
ductions in an agent’s LTM. These productions are
then used as input to the agent’s pattern-recognition
system (see section 4.3) whose operation is intended
to be analogous to habitual behaviour in human-
beings: behaviours become habitual when they are
frequently selected in response to particular goals be-
ing activated (Aarts and Dijksterhuis, 2000). Activa-
tion of goals can be inferred to occur after analysing
input from the environment as in “Belief-Desire-
Intention” decision-making architectures (Bratman,
1987). Therefore, explicitly considering goals is re-
dundant since environment states and goals have a
simple one-to-one mapping.
There are three sub-goals that may need to be
achieved in order to achieve the agent’s main goal of
“fill-hole-with-tile”. These are: “find-tile”, “secure-
tile” and “find-hole”. Each problem-solving proce-
dure can output one of 17 action chunk classes to
help achieve these goals: “move-randomly”, “move-
to-tile”, “move-around-tile”, “push-tile” (of which
there are four variations each: north, south, east
and west) and “remain-stationary” (of which there
are no variations). The problem-solving system fol-
lows the procedure outlined below given some visual
chunk, V as input. Active goals are highlighted using
fixed-width font, procedure entry points are high-
lighted in bold and actions generated are highlighted
in italics. Note that “adjacent” is defined as an object
being on a square immediately north, east, south or
west of the object referred to.
TheArtofBalance-Problem-Solvingvs.Pattern-Recognition
135
1. Agent is surrounded i.e. squares immediately
north, east, south and west of the agent are occu-
pied by non-movable tiles, holes or other agents;
remain-stationary generated.
2. V indicates that the agent is not surrounded and
tiles and holes are nearby. Determine closest hole
to the agent, H, and tile that is closest to H, T .
• T is adjacent to agent and can be pushed
closer to H from agent’s current position;
fill-hole-with-tile activated, push-tile-
to-hole run, push-tile generated.
• T is adjacent to agent but can’t be pushed
closer to H from agent’s current position;
secure-tile activated, secure-tile run, move-
around-tile generated.
• T is not adjacent to agent; secure-tile acti-
vated, secure-tile run, move-to-tile generated.
3. V indicates that agent is not surrounded, tiles are
nearby but holes are not. Determine distance from
T to agent.
• T is adjacent to agent; find-hole activated,
push-tile-to-hole run, push-tile generated.
• T is not adjacent to agent; secure-tile acti-
vated, secure-tile run, move-to-tile generated.
4. V indicates that the agent is not surrounded but
can’t see any tiles; find-tile activated, move-
randomly run, move-randomly generated.
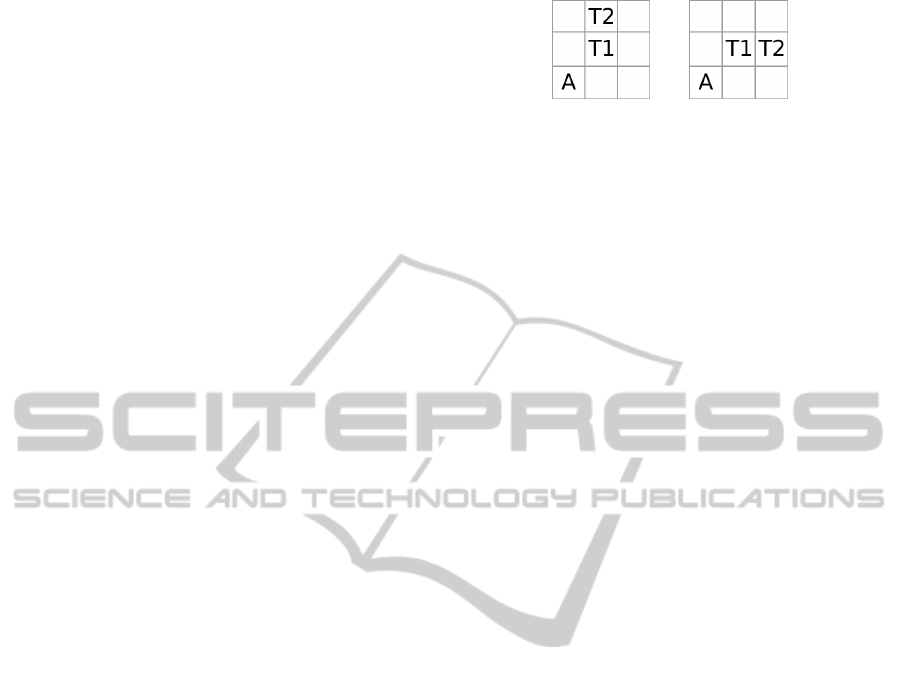
An important point to note is that procedures gen-
erate actions non-deterministically in some circum-
stances. Consider the environment states in figures
2(a) and 2(b). The goal of agent A in both states
is “secure-tile”, specifically, tile T 1, so it runs the
“secure-tile” procedure to generate an action to try
and achieve this goal. The optimal action in the case
of figure 2(a) is for A to move north around T 1 so
that it is able to push T 1 to the east thus securing
it. However, this action is non-optimal if the envi-
ronment state in figure 2(b) is considered since A can
not push T 1 east since T 2 blocks T 1 from this direc-
tion. Consequently, the optimal action in one state
may be the non-optimal action in a similar state so in
this case the secure-tile heuristic has a 0.5 probability
of generating a “move-around-tile north” action and
a 0.5 probability of generating a “move-around-tile-
east” action if an agent’s closest tile is situated to the
north-east of the agent.
4.3 Pattern-recognition System
The pattern-recognition system uses production opti-
mality ratings and visual patterns as input to generate
(a) State 1. (b) State 2.
Figure 2: Environment state examples to justify non-
determinism of actions by problem-solving procedures.
actions to perform. There are three crucial differences
between this system and the problem-solving system:
1. The pattern-recognition system is considered to
be a part of CHREST since the components re-
quired to enable operation of the system are con-
tained within CHREST.
2. The pattern-recognition system can not generate
actions to create new productions, it can only se-
lect actions based upon existing productions.
3. The pattern recognition-system may have to
choose an action from many potential productions
depending upon how many productions exist for
the current environment state i.e. visual-action
mapping is not always 1:1.
The system first attempts to retrieve a visual chunk
from LTM, V
0
, using the visual chunk input to the
pattern-recognition system, V . If no visual chunks are
retrieved execution of the system halts. Otherwise the
optimality ratings of the productions associated with
V
0
are used as input to the Roulette selection algo-
rithm where an action is then selected for execution.
Note that, due to the intention of CHREST to simulate
human cognition as closely as possible, it may be that
V 6= V
0
but V
0
contains patterns common to itself and
V . For example, if < [T 1 0] [H 2 0] > is passed
to LTM as input but no LTM node contains the full
chunk, < [T 1 0] > may be retrieved if it is stored
in LTM.
4.4 Agent Types
In section 3.1 we mentioned that the way in which the
two types of productions mentioned are handled cre-
ates three types of agents. This “handling” refers to
whether a type of production can be created in LTM
and whether the production can have its optimality
rating calculated and stored.
• Agent Type 1 (pure problem-solver): neither type
of production are created or rated in LTM.
• Agent Type 2 (pure pattern-recogniser): only pro-
ductions containing visual chunks and explicit ac-
tion chunks are stored and rated in LTM.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
136

• Agent Type 3 (problem-solver and pattern-
recogniser): both types of production are stored
and rated in LTM. Note that, when the optimality
rating of the production represented in an episode
is modified, this type of agent has a 50% chance of
modifying either type of production if an episode
stipulates that its action was generated by the
problem-solving system (see section 4.5 for im-
plementation details).
Agent type 1’s balance between problem-solving
system and pattern-recognition system use is
weighted heavily in favour of the problem-solving
system. Agent type 1 can be considered as a pure
problem-solver since productions are never created
or rated. Therefore, the pattern-recognition system
can not be used since it does not have the information
required to operate. Agent type 2’s balance of
problem-solving and pattern-recognition system use
is weighted in favour of pattern-recognition since
productions prescribing the use of the problem-
solving system are never created or rated. Agent
type 3 strikes an equal balance between problem-
solving and pattern-recognition system use; the
problem-solving system will be used more in initial
decision-making (as it is for agent type 2) but as
LTM expands, it may be that productions generated
result in the problem-solving system being used more
frequently.
4.5 Execution Cycle
The agent execution cycle runs for each agent after
every time increment in the Tileworld environment.
The agent begins by checking to see if there is an
action, α, currently loaded for execution. Note that
agents have a specific intention reconsideration strat-
egy implemented: when the current time, T , equals
the time that the loaded action, α, is to be performed,
t, the agent generates a new visual-pattern, V
0
, and
compares this to the visual-pattern, V , used to gen-
erate α. If V 6= V
0
, the agent does not perform α and
instead generates and loads a new action for execution
based upon the information in V
0
. This, the execution
cycle is:
1. α loaded for execution, check to see if T = t.
(a) T = t: generate new visual chunk, V
0
, and com-
pare this to the visual chunk used to generate α,
V .
i. V = V
0
: perform α.
A. If α is not a “move-randomly” action chunk,
create new episode and attempt to create a
production in LTM between V and α (bias-
ing random movement is not beneficial given
Tileworld stochasticity).
B. If a point is scored, apply PSDR to each
episode, modify production optimality rat-
ings and clear episodic-memory. If episode
indicates that action was generated using
problem-solving, generate a random float R,
(0 <=R< 1). If R <= 0.5, modify optimal-
ity rating of the production containing the ac-
tion chunk that prescribes use of problem-
solving otherwise, modify optimality rating
of the production containing the explicit ac-
tion chunk
4
.
ii. V 6= V
0
: go to step 2.
(b) T 6= t: stop current execution cycle.
2. No action loaded for execution:
(a) Generate visual-pattern, V .
(b) Pass V as input to LTM and attempt to learn.
(c) Use V to generate a new action, α, using
problem-solving or pattern-recognition system
depending upon agent type.
(d) Load α for execution and attempt to learn α by
passing it as input to LTM.
5 SIMULATION DETAILS
To investigate what balance of problem-solving and
pattern-recognition system use maximises agent per-
formance given differing environmental complexi-
ties, 27 conditions were simulated and run. Con-
ditions are representative of various degrees of in-
strinsic/extrinsic environmental complexity and agent
types. For each condition, the average score of all
agents were recorded together with average frequen-
cies of problem-solving/pattern-recognition system
use. Each condition was repeated 10 times to harvest
a data set large enough to provide a robust analysis.
Our null hypothesis states that different balances of
problem-solving and pattern-recognition do not have
any effect on the performance of agents and altering
extrinsic and intrinsic environment complexity does
not have any effect upon problem-solving or pattern-
recognition use.
Intrinsic environment complexity is controlled by
the values of the “hole-birth-probability”, “tile-birth-
probability”, “hole-lifespan” and “tile-lifespan” pa-
rameters (see section 2); higher tile/hole birth prob.
values and lower tile/hole lifespan values equate to
greater complexity since more tiles/holes will appear
but for shorter periods of time. One may expect the
value for the “tile/hole-born-every” parameter to also
4
Since CHREST’s actions are time-limited, both pro-
ductions can not be reinforced simultaneously.
TheArtofBalance-Problem-Solvingvs.Pattern-Recognition
137
Table 1: Independent variable names, type (agent, CHREST, environment), value used and justification of value mappings.
Independent Variable Type Value Justification
problem-solving-time Agent 1 sec
Equals value of the “tile/hole-born-every” parameters so
planned actions may be reconsidered due to the appear-
ance of a new tile or hole.
sight-radius Agent 2 See section 4.
add-link-time CHREST 10 sec Taken from (Simon, 1969).
discount-rate CHREST 0.5 Median value selected.
discrimination-time CHREST 10 sec Taken from (Simon, 1969).
episodic-memory-size CHREST 10
Irrelevant productions less likely to have their optimality
increased when agent achieves its main goal.
familiarisation-time CHREST 2 sec Taken from (Simon, 1969).
pattern-recognition-time CHREST 0.2 sec Taken from (Gobet, 1997).
hole-born-every Env. 1 sec N/A.
play-time Env. 28800 sec
Allows pattern-recognition systems to learn enough in-
formation to be useful.
reward-value Env. 1 Equals value of the “problem-solving-time” parameter.
tile-born-every Env. 1 sec Equals value of the “problem-solving-time” parameter.
be varied. However, the instrinsic complexity of the
environment can be significantly modified by varying
the values of the parameters mentioned. Values for
the “tile/hole-birth-probability” parameters were de-
rived by simply taking the median probability, 0.5,
as the moderate complexity value and then taking the
lowest/highest values possible without guaranteeing
tile/hole birth since this would significantly skew the
results. Mappings for the values that the “tile/hole-
birth-probability” and “tile/hole-lifespan” parameters
are set to for each level of environment complexity
are provided below:
• Environment complexity: low
– tile/hole-birth-probability: 0.1
– tile/hole-lifespan: 80 seconds
• Environment complexity: moderate
– tile/hole-birth-probability: 0.5
– tile/hole-lifespan: 40 seconds
• Environment complexity: high
– tile/hole-birth-probability: 0.9
– tile/hole-lifespan: 20 seconds
Extrinsic environmental complexity is controlled
by the number of players and can be set to either 2,
4 or 8. Increasing the number of players can be in-
terpreted as increasing the environment complexity
since environment resources are shared in Tileworld
and a greater number of environment states may be
encountered by an agent due to an increased number
of interactions between other agents and resources.
All other variable values are kept constant; Table
1 provides the mappings of each independent variable
to its type (CHREST/agent/environment), its value
and a justification for why this value was selected (if
applicable).
There are three major groups of conditions differ-
entiated by the degree of intrinsic environment com-
plexity used. These major groups then consist of a
further three sub-groups of conditions differentiated
by the degree of extrinsic environmental complex-
ity (number of players) present. Finally, each sub-
group consists of three sub-sub-groups differentiated
by agent type (see section 4.4). For example, extrinsic
environment complexity is set to 1 (low) in conditions
1-9; number of players is set to 2, 4 and 8 for condi-
tions 1-3, 4-6 and 7-9, respectively; the type of agents
in each condition is set to 1 for conditions 1, 4 and 7,
2 for conditions 2, 5 and 8 and 3 for conditions 3, 6
and 9.
6 RESULTS AND DISCUSSION
All results are analysed using a 3 × 3 × 3 analysis
of variance (ANOVA), with environment complex-
ity, number of agents and agent type as between-
subject variables. As mentioned in section 5 we have
collected data for three dependent variables: aver-
age score, average frequency of problem-solving sys-
tem use and average frequency of pattern-recognition
system use. The section is split into two sub-
sections: section 6.1 discusses results concerning av-
erage scores and section 6.2 discusses results con-
cerning average frequency of problem-solving and
pattern-recognition system use. Both null hypotheses
stated in section 5 are disproved.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
138
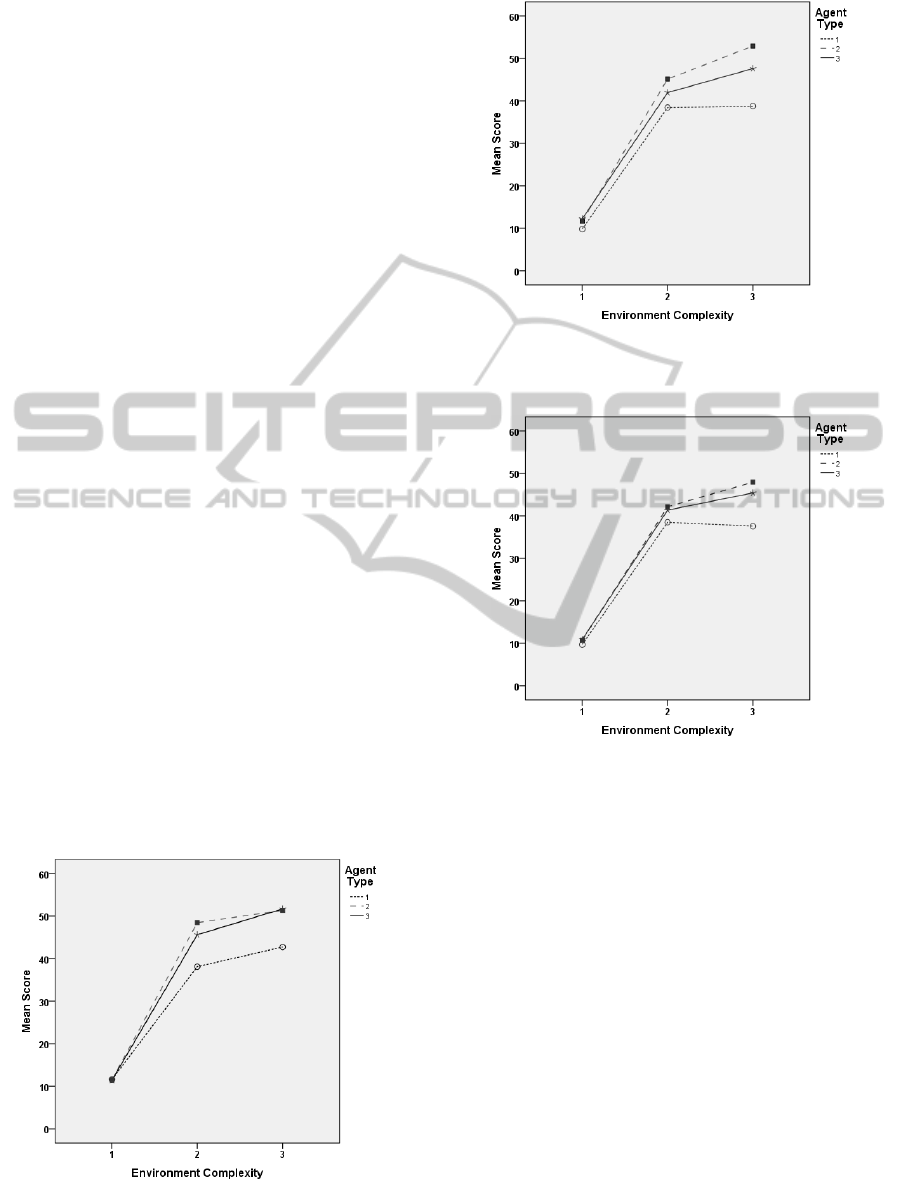
6.1 Average Scores
Figures 3, 4 and 5 show average scores achieved by
each agent type for each degree of environment com-
plexity organised by number of players. The three
main effects were statistically significant: environ-
ment complexity, F(2, 243) = 2,437.7, number of
agents, F(2,243) = 16.6, and agent type, F(2,243) =
70.8 and all p < 0.001.
Irrespective of the number of players and com-
plexity used, the average score achieved by agent
type 2 is either approximately equal or greater than
the average score of agent type 3. Agent type 1 con-
sistently achieves the lowest average scores. By in-
creasing the number of players, average scores are
decreased for each agent type whilst increasing en-
vironment complexity causes average scores to in-
crease for each agent type. The only exception to this
trend are the average scores obtained by agent type 1
when there are 4/8 players in the environment and en-
vironment complexity is increased from 2 to 3. In
these conditions, agent type 1’s average score either
remains equal or decreases.
These results are explained by considering the ef-
fects of increasing the number of agents and environ-
mental complexity upon intention reconsideration and
resource availability. Increasing environmental com-
plexity increases the amount of resources required to
score, so average scores are likely to increase. How-
ever, increasing the number of agents elevates com-
petition for resources and decreases their availabil-
ity which can result in a general decline of scores.
Furthermore, increasing both the number of players
present in the environment and environmental com-
plexity can create an increase in the total number of
environment states encountered by agents since more
opponents may be encountered and a greater number
Figure 3: Average agent type scores for each level of en-
vironment complexity when 2 players are present in Tile-
world.
Figure 4: Average agent type scores for each level of en-
vironment complexity when 4 players are present in Tile-
world.
Figure 5: Average agent type scores for each level of en-
vironment complexity when 8 players are present in Tile-
world.
of interactions between agents and resources can oc-
cur. Ultimately, this increases the likelihood that in-
tention reconsideration will be employed since it is
more likely than an agent’s observable environment
will change between action deliberation and perfor-
mance.
Consequently, being able to perform more actions
before the observable environment changes is the key
determinant of performance. Since the interval of
time for an agent generating an action using problem-
solving and the environment potentially creating new
tiles and holes is 1 second, intention reconsideration is
more likely to be triggered when the problem-solving
system is used and when extrinsic and intrinsic en-
vironment complexity is increased. Therefore, in the
space of time where the environment remains static,
agents that use pattern-recognition can perform up to
5 actions whereas only 1 action can be performed us-
TheArtofBalance-Problem-Solvingvs.Pattern-Recognition
139
ing problem-solving. This increased volume of ac-
tion enables agents to score more frequently when us-
ing pattern-recognition compared to problem-solving;
demonstrated by comparing the performance of type 1
agents against types 2 and 3 generally and especially
when agent type 1’s performance is analysed in con-
text of increasing environmental complexity.
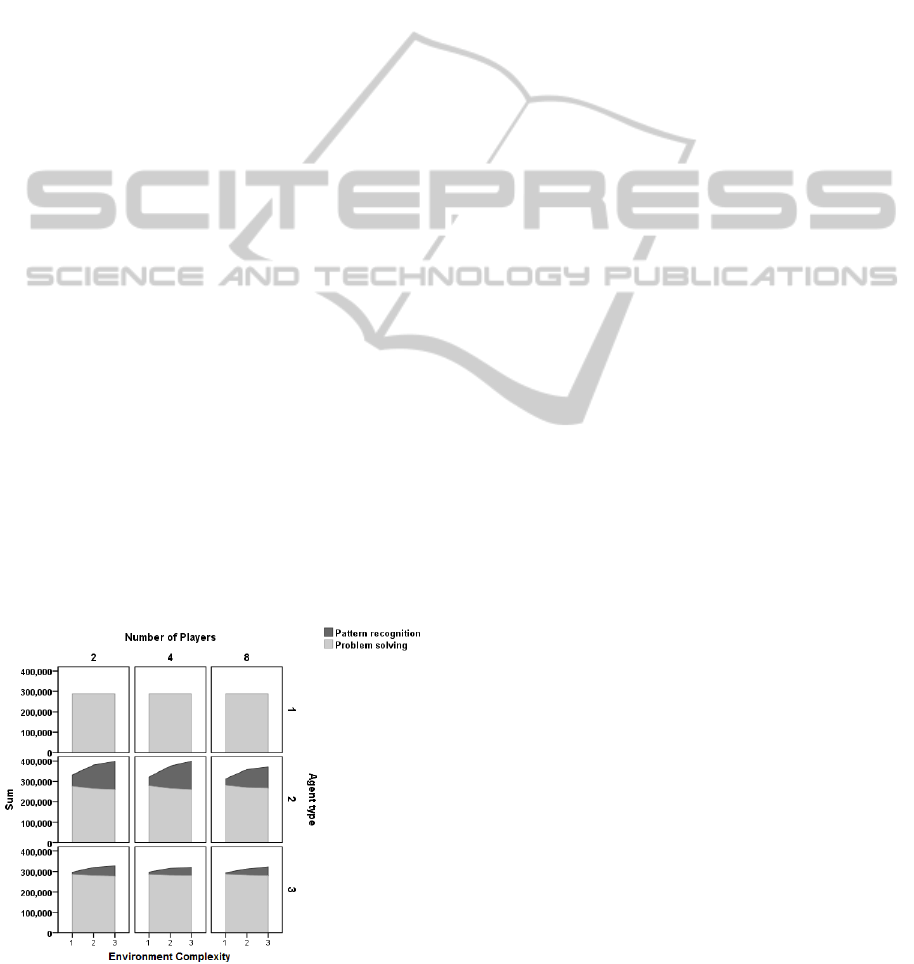
6.2 Problem-solving and
Pattern-recognition Use
Average frequencies of problem-solving and pattern-
recognition system use are shown in figure 6. Re-
sults indicate a main effect of environment complex-
ity, F(2,243) = 295.2, number of agents, F(2,243) =
24.0, and agent type, F(2,243) = 1,511.7 with all
p < 0.001. As expected, agent type 1 never uses
pattern-recognition whilst agent type 2 uses pattern
recognition more frequently than agent type 3. By
increasing the number of agents, pattern-recognition
system use by agent types 2 and 3 decreases whilst
increasing environment complexity increases the av-
erage frequency of pattern-recognition use by these
agent types. These main effects are further qualified
by the fact that environment complexity × agent type
and number of agents × agent type are both statisti-
cally significant for agent types 2 and 3: F(4, 243) =
113.6, p < 0.001 and F(4,243) = 15.0, p < 0.001,
respectively.
Average frequency of problem-solving use yields
results that tend to be the mirror-image of those ob-
tained for average frequency of pattern-recognition
use. This is expected since, if an agent does not
use problem-solving it will use pattern-recognition
and vice-versa (if it is able to). There is a main ef-
fect of agent type, F(2,243) = 1,512.1, p < 0.001
Figure 6: Average frequency of problem-solving/pattern-
recognition system use for each agent type for all variations
of environment complexity and number of players.
with agent type 1 using problem-solving most fre-
quently on average (as expected) and agent type 2
least frequently on average. The main effect of en-
vironment complexity, F(2,243) = 295.2, p < 0.001,
reflects the fact that average frequency of problem-
solving use tended to decrease with increasing com-
plexity. Finally, the main effect of number of agents
was significant, F(2, 243) = 24.0, reflecting a small
increase in problem-solving use as the number of
agents increases. Again, these main effects are fur-
ther qualified by the fact that environment complex-
ity × agent type and number of agents × agent type
are both statistically significant for agent types 2 and
3 (F(4,243) = 113.6, p < 0.001, and , F(4, 243) =
15.0, p < 0.001).
When compared with results for average scores,
problem-solving appears to have a negative effect
upon performance when the number of players and
environmental complexity is increased (see results for
agent type 1 in figures 3-5 and 6), whilst pattern-
recognition appears to positively affect performance
(see results for agent types 2 and 3 in the aforemen-
tioned figures). Bias on pattern-recognition appears to
produce better performance than balanced problem-
solving and pattern-recognition, since agent type 2
has a higher average frequency of pattern-recognition
use and achieves higher average scores than agent
type 3 (as noted in section 6.1). Therefore, acting
quickly and, potentially, sub-optimally in complex
environments appears to be beneficial with regards to
performance.
More frequent use of the problem-solving system
on average as the number of players is increased can
be explained by considering the effect that increasing
the number of players has on environment dynamism
(see section 6.1 for a discussion of this). The increase
in interactions between agents and environment re-
sources could decrease the potential space of environ-
ment states seen by an agent. This would be caused by
other agents moving resources away from a particular
agent, frequently resulting in a “blank” observable en-
vironment. This results in agent types 2 and 3 having
less completely familiarised and associated chunks in
their CHREST architectures, and hence a reduced use
of their pattern-recognition systems.
The observed increase in pattern-recognition use
as environment complexity is elevated is somewhat
paradoxical to the above argument since this increase
can also be explained by the consequences of height-
ened environmental dynamism. However, the in-
crease in dynamism in this case stems from a con-
sideration of intrinsic environment complexity rather
than the number of agents present in the environ-
ment. Increasing intrinsic environment complexity
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
140

increases the potential state space of the environment,
resulting in increased discrimination and familiarisa-
tion for the CHREST architectures of agent types 2
and 3. Consequently, visual-action chunk associa-
tion may be “crowded-out”, intuitively implying that
less pattern-recognition should occur. However, many
resources are likely to exist at any given time in a
highly complex environment so it is likely that an
agent will encounter the same environment state fre-
quently, increasing the number of completely famil-
iarised chunks and associations in its CHREST archi-
tecture. Thus, it becomes more likely that an agent
that can use pattern-recognition will do so.
7 CONCLUSIONS AND FUTURE
WORK
In this paper we have described and implemented
a novel computational architecture for agents using
a modular dual-process architecture (Lane and Go-
bet, 2012). This architecture consists of a problem-
solving and pattern-recognition system, created us-
ing a combination of environment-specific procedures
for generating actions: the CHREST architecture, the
PSDR algorithm and the Roulette selection mecha-
nism. The system is capable of representing different
balances of problem-solving and pattern-recognition
use: pure problem-solving, pure pattern-recognition
and a mixture of both. These balances of the two sys-
tems were embodied as three types of agent that were
situated in the Tileworld environment. We used these
agents to ascertain the effects of problem-solving and
pattern-recognition system use on agent performance
in this environment given differing degrees of intrin-
sic and extrinsic environmental complexity.
We discovered that use of pattern-recognition is
beneficial to agent performance especially when in-
trinsic and extrinsic environment complexity is in-
creased, whereas use of problem-solving is detrimen-
tal, due to the required time to solve problems. As
overall environmental complexity increases, we fur-
ther find that agents using pure problem-solving (that
is, the complete absence of pattern-recognition) are
further disadvantaged whereas agents that were more
likely to use pattern-recognition performed best. Our
results therefore demonstrate that an agent which can
use both problem-solving and pattern-recognition is
at an advantage in the complex, dynamic environment
modeled and even more so when pattern-recognition
is favoured. Essentially, these results would indi-
cate that it is more important for an agent to deliber-
ate upon actions quickly (resulting in potentially sub-
optimal actions) rather than slowly (producing more
optimal actions), in the Tileworld environment mod-
eled at least. This is an interesting finding given that
the Einstellung effect (Luchins, 1942) may be man-
ifest in the agents that perform best; further simula-
tions will be run to ascertain if this result still holds
when the same agents used in this paper are allowed
to exist in the same Tileworld environment for longer
periods of time and when heterogeneous agent types
can co-exist.
In future work, we also intend to consider dif-
ferent reinforcement-learning theories and action-
selection algorithms, and compare these results to
those delineated in this paper. In addition, we will
consider alternative discount rates, and how alter-
ing the observable environment range affects perfor-
mance. Furthermore, we aim to establish whether a
more complex environment causes balanced problem-
solvers and pattern-recognisers to gain an advantage
over problem-solvers and pattern-recognisers whose
pattern-recognition is favoured given that a greater
range of possible solutions to problems may exist.
REFERENCES
Aarts, H. and Dijksterhuis, A. (2000). Habit as knowl-
edge structures: Automaticity in goal-directed behav-
ior. Journal of Personality and Social Psychology,
78(1):53–63.
Arai, S., Sycara, K. P., and Payne, T. R. (2000). Experience-
based reinforcement learning to acquire effective be-
havior in a multi-agent domain. In Proceedings of the
6th Pacific Rim International Conference on Artificial
Intelligence, pages 125–135.
Baker, J. E. (1987). Reducing bias and inefficiency in the
selection algorithm. In Grefenstette, J. J., editor, Pro-
ceedings of the Second International Conference on
Genetic Algorithms on Genetic Algorithms and Their
Application. L. Erlbaum Associates Inc.
Bilali
´
c, M., McLeod, P., and Gobet, F. (2008). Inflexibility
of experts - reality or myth? Quantifying the Einstel-
lung effect in chess masters. Cognitive Psychology,
56(2):73–102.
Bratman, M. E. (1987). Intentions, Plans, and Practical
Reason. Harvard University Press.
Chase, W. G. and Simon, H. A. (1973). Perception in chess.
Cognitive Psychology, 4:55–81.
Dayan, P. and Daw, N. D. (2008). Decision theory, rein-
forcement learning, and the brain. Cognitive, Affective
and Behavioral Neuroscience, 8(4):429–453.
de Groot, A. D. (1978). Thought and Choice in Chess (First
edition in 1946). Mouton, The Hague.
de Groot, A. D. and Gobet, F. (1996). Perception and Mem-
ory in Chess: Heuristics of the Professional Eye. Van
Gorcum, Assen.
de Wit, S. and Dickinson, A. (2009). Associative theo-
ries of goal-directed behaviour: a case for animal-
TheArtofBalance-Problem-Solvingvs.Pattern-Recognition
141

human translational models. Psychological Research,
73(4):463–476.
Erev, I. and Roth, A. E. (1998). Predicting how people
play games: Reinforcement learning in experimen-
tal games with unique, mixed strategy equilibria. The
American Economic Review, 88(4):pp. 848–881.
Evans, J. S. B. T. (2008). Dual-processing accounts of rea-
soning, judgment and social cognition. Annual Review
of Psychology, 59:255–278.
Freudenthal, D., Pine, J. M., and Gobet, F. (2009). Simu-
lating the referential properties of Dutch, German and
English root infinitives in MOSAIC. Language Learn-
ing and Development, 15:1–29.
Gillan, C. M., Papmeyer, M., Morein-Zamir, S., Sahakian,
B. J., Fineberg, N. A., Robbins, T. W., and de Wit,
S. (2011). Disruption in the balance between goal-
directed behavior and habit learning in obsessive-
compulsive disorder. American Journal of Psychiatry.
Gobet, F. (1993). Les m
´
emoires d’un joueur d’
´
echecs. Edi-
tions Universitaires, Fribourg, Switzerland.
Gobet, F. (1997). A pattern-recognition theory of search
in expert problem solving. Thinking and Reasoning,
3:291–313.
Gobet, F., Lane, P. C. R., Croker, S. J., Cheng, P. C.-H.,
Jones, G., Oliver, I., and Pine, J. M. (2001). Chunking
mechanisms in human learning. Trends in Cognitive
Sciences, 5:236–243.
Gobet, F. and Simon, H. A. (2000). Five seconds or sixty?
Presentation time in expert memory. Cognitive Sci-
ence, 24:651–82.
Grefenstette, J. J. (1988). Credit assignment in rule dis-
covery systems based on genetic algorithms. Machine
Learning, 3:225–245.
Hesketh, B. (1997). Dilemmas in training for transfer and
retention. Applied Psychology, 46(4):317–339.
Holroyd, C. B. and Coles, M. G. (2002). The neural basis
of human error processing: Reinforcement learning,
dopamine, and the error-related negativity. Psycho-
logical Review, 109(4):679–709.
Jongman, R. W. (1968). Het Oog Van De Meester. Assen:
Van Gorcum.
Laird, J. E. (2012). The Soar Cognitive Architecture. MIT
Press.
Lane, P. C. R. and Gobet, F. (2012). CHREST models of im-
plicit learning and board game interpetation. In Bach,
J., Goertzel, B., and Ikle, M., editors, Proceedings
of the Fifth Conference on Artificial General Intelli-
gence, volume LNAI 7716, pages 148–157, Berlin,
Heidelberg. Springer-Verlag.
Luchins, A. S. (1942). Mechanization in problem solving:
The effect of einstellung. Psychological Monographs,
54(6):i–95.
Miyazaki, K., Yamamura, M., and Kobayashi, S. (1994).
On the rationality of profit sharing in reinforcement
learning. In 3rd International Conference on Fuzzy
Logic, Neural Nets and Soft Computing, pages 285–
288. Korean Institute of Intelligent Systems.
Pollack, M. and Ringuette, M. (1990). Introducing the Tile-
world: Experimentally evaluating agent architectures.
In Eighth National Conference on Artificial Intelli-
gence, pages 183–189. AAAI Press.
Raza, M. and Sastry, V. (2008). Variability in behavior
of command agents with human-like decision making
strategies. In Tenth International Conference on Com-
puter Modelling and Simulation, pages 562–567.
Saariluoma, P. (1994). Location coding in chess. The Quar-
terly Journal of Experimental Psychology, 47A:607–
630.
Samsonovich, A. (2010). Toward a unified catalog of im-
plemented cognitive architectures. In Proceedings of
the 2010 Conference on Biologically Inspired Cogni-
tive Architectures, pages 195–244, Amsterdam, The
Netherlands. IOS Press.
Simari, G. I. and Parsons, S. D. (2004). On approximating
the best decision for an autonomous agent. In Sixth
Workshop on Game Theoretic and Decision Theoretic
Agents, Third Conference on Autonomous Agents and
Multi-agent Systems, pages 91–100.
Simon, H. A. (1969). The sciences of the artificial. MIT
Press, Cambridge, MA.
Simonton, D. K. (1999). Origins of genius: Darwinian per-
spectives on creativity. Oxford University Press, New
York.
Sloman, S. (1996). The empirical case for two systems of
reasoning. Psychological Bulletin, 119:3–22.
Sternberg, R. J. (1996). The road to excellence: The ac-
quisition of expert performance in the arts and sci-
ences, sports, and games, chapter Costs of expertise,
pages 347–354. Hillsdale, NJ: Lawrence Erlbaum As-
sociates.
Sun, R., Slusarz, P., and Terry, C. (2005). The interaction of
the explicit and the implicit in skill learning: A dual-
process approach. Psychological Review, 112(1):159–
192.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. MIT Press.
Tversky, A. and Kahneman, D. (1983). Extensional versus
intuitive reasoning: The conjunction fallacy in prob-
ability judgment. Psychological Review, 90(4):293–
315.
Zeitz, C. M. (1997). Expertise in context: Human and ma-
chine, chapter Some concrete advantages of abstrac-
tion: How experts’ representations facilitate reason-
ing, pages 43–65. Cambridge, MA: The MIT Press.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
142
