
Solving Sensor Void Problem in Uncontrolled Mobile Sensor
Networks
Development of Mobile Sensor Database Systems
Soo Seok Park
1
, Chong Sok Lim
2
and Soon J. Hyun
1
1
Department of Computer Science, KAIST, 373-1 Guseong-dong, Yuseong-gu, Daejeon 305-701, Republic of Korea
2
Department of Information and Communication Engineering, KAIST, Yuseong-gu, Daejeon 305-701, Republic of Korea
Keywords: Sensor Database System, Mobile Sensor Networks, Query Language, Database.
Abstract: Due to the random movement of sensor nodes in uncontrolled mobile sensor networks, the distribution of
sensor nodes may not be uniform over the area of network coverage. Querying a target space in which
mobile sensors are unavailable at the time of the data request will lead to no return of the result. In this
paper, this problem is referred to as sensor void problem, which leads to difficulties in data management and
application design activities. We address the sensor void problem and offer solutions with a location-aware
time-constrained query processing strategy. The key idea of the proposed strategy is to allow mobile sensor
nodes to keep track of time validity and target location matching checks for the execution of the queries
received from the base station. Programmers can specify a certain degree of time sensitivity in their queries
according to their applications’ semantics. We implemented the proposed mobile query processing scheme
into our previously developed sensor database system. A performance evaluation shows how the proposed
query processing strategy effectively handles the sensor void problem with various parameters of an
uncontrolled mobile sensor network.
1 INTRODUCTION
With the rapid technical advancements in sensor
hardware designs and wireless communications, a
variety of smart sensing functions are increasingly
equipped virtually in all types of objects, including
smart phones, vehicles, wearable devices, unmanned
flying objects, and others. A wireless sensor network
(WSN) is composed of a large number of sensor
nodes to monitor the physical world. Based on the
mobility of the sensor node, there are two types of
WSNs, the stationary sensor network and the mobile
sensor network (MSN). Application services using
the former include disaster management, precision
agriculture, health care and traffic management.
Recently, a variety of new application services, such
as land, ocean and air exploration and monitoring;
automobile applications; habitant monitoring; and a
wide range of other scenarios have been developed
(De Zoysa et al., 2007; Nittel et al., 2007). They
demand data collection from mobile sensor nodes
(i.e., sensors on moving objects) and form a new
class of WSN known as a mobile sensor network
(MSN).
There are a few different types of mobility in MSNs
(Di Francesco et al., 2011). We focus on the type of
MSN known as an uncontrolled mobile sensor
network, which is composed of randomly moving
mobile sensor nodes. This type is illustrated in
Figure 1. In this type of mobile sensor network,
sensors are typically attached to autonomous objects,
such as vehicles, unmanned flying objects, or smart
phones. A few recent studies tried to leverage these
types of sensor networks to support environmental
monitoring and urban monitoring applications
(Abdelzaher et al., 2007; Campbell et al., 2006).
The typical problem in uncontrolled MSNs is,
due to their random movement, that there may exist
some target regions (e.g., grid cells) which do not
have any sensor node to execute the given data
collection query at the time of the application
request. We refer to this situation as sensor voidance
in a region. From time to time, any cell may become
a sensor void region in an uncontrolled MSN, as
sensor nodes move randomly. In other words,
although a cell region may be a sensor void at the
time of querying, some sensor nodes may come into
47
Seok Park S., Sok Lim C. and J. Hyun S..
Solving Sensor Void Problem in Uncontrolled Mobile Sensor Networks - Development of Mobile Sensor Database Systems.
DOI: 10.5220/0005228400470055
In Proceedings of the 4th International Conference on Sensor Networks (SENSORNETS-2015), pages 47-55
ISBN: 978-989-758-086-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

the target region and thus execute the associated
query.
Figure 1: Mobile sensor network with randomly moving
sensor nodes.
In this paper, we address the sensor void
problem and offer a solution with a location-aware
time-constrained query processing strategy. The
proposed technique aims to maximize the
probability of data acquisition from the target region
for a given query. The key idea of the proposed
strategy is that it allows mobile sensor nodes to
check and keep track of the time validity and target
location matching for the execution of the queries
received from the base station. Programmers can
specify a certain degree of time sensitivity in their
queries according to their applications’ semantics.
The benefits are two-fold. First, this would give
applications a greater probability of a data return
from the designated target cell region by minimizing
the rate of data no-returns. Second, by avoiding
possibly unnecessary query executions and the
collection of incorrect sensor data, mobile sensor
nodes may reduce their battery consumption levels.
In our location-aware time-constrained query
processing strategy, the overall procedure can be
briefly described in phases, as follows. First, the
base station broadcasts the application’s queries to
all mobile sensor nodes in the sensor network.
Second, sensor nodes store them into a query table if
the current location does not match the target region
of the query. Third, mobile sensor nodes check the
time validity and target matching for all of the
queries stored in its query table. This comparing
procedure is triggered in the sensor node whenever
the node moves into a new cell region. Then, the
node in the target region will finally fire a matching
query and transmit the sensor data to the base
station.
The remainder of this paper is organized as
follows. We introduce the sensor database system
and its major related works in Section 2. In Section
3, we propose a location-aware time-constrained
query processing technique to manage the sensor
void problem of an uncontrolled mobile sensor
network. A performance evaluation of our work is
given in Section 4, and the conclusion of this paper
is given in Section 5.
2 DATA MANAGEMENT IN
MOBILE SENSOR NETWORKS
In WSNs, database management is an important
issue when coping with the excessive and yet mostly
useless amount of streaming data and the energy
drain of battery-operated sensor nodes. In sensor
databases, sensor data are collected by querying the
target sensors and the sensors of the target region
within the sensor network. There have been many
sensor database systems designed with various query
languages and query processing strategies for a wide
range of sensor network applications services
(Diallo et al., 2013; Madden et al., 2004).
Recently, database management in mobile sensor
networks (MSNs) has attracted a considerable
amount of attention which has motivated a wide
range of new applications (De Zoysa et al., 2007;
Nittel et al., 2007). The mobility of sensor nodes is a
major issue in MSNs (Zeinalipour-yazti and
Chrysanthis, 2009). Valkanas et al. (2001) designed
declarative queries for an in-network data analysis,
which can be efficiently optimized to allow for the
automatic deployment of executable code for a
mobile setting. They presented a watchdog as a
future direction; this is a software module that tracks
sensor network changes. Andreou et al. (2011)
proposed SenseSwarm, a framework for the
acquisition and storage of spatio-temporal events in
MSNs. SenseSwarm detects physical phenomena
using a swarm of sensor nodes that are dynamically
organized in the perimeter and core nodes. The two
sensor database systems above assume sensor nodes
with controlled mobility or sensor nodes with low
mobility. In contrast to the above mobile sensor
database systems, our work looks into MSNs in
which mobile sensors have fully random mobility
and where application queries seek sensor data from
any target region.
A few recent studies leveraged human-carried or
vehicle-mounted mobile sensor networks using
short/mid-range radios (e.g., ZigBee, Wi-Fi,
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
48

Bluetooth) for the purpose of data collection to
support a wide range of new applications
(Abdelzaher et al., 2007; Campbell et al., 2006).
Database management in uncontrolled MSNs will
frequently encounter the absence of sensor nodes in
the target area at the time of the application’s query
request. This sensor void problem results in a no-
return (or empty return) of data to the application.
The sensor void regions are never predetermined
and may exist randomly over modeled cell regions.
Thus, if some sensor nodes near a sensor void cell
region hold requested query for a certain period of
time, some of them may happen to enter the sensor
void target cell region and hence execute the query.
No existing works conducted an investigation of this
subject by assuming that some mobile (or fixed)
sensor nodes exist in all cell regions (Diallo et al.,
2013; Madden et al., 2004).
3 LOCATION-AWARE
TIME-CONSTRAINED QUERY
IN SNQL
3.1 Time Window Operation
The situation of sensor voidance in uncontrolled
MSNs is a prevalent problem due to the random
mobility of the mobile sensor nodes. It will result in
no return of the sensor data. In an effort to manage
this problem, we designed query operations and
processing techniques, known collectively as a
location-aware time-constrained query processing
strategy, as an extension to our previous
development of a sensor network query language
and processing system (Changbai et al., 2008; Lim
et al., 2014). Below, we briefly explain how this
strategy manages query processing tasks which take
place in a sensor void target region.
The application specifies the time validity in
terms of a time window in its sensor database query,
and the query remains valid at sensor nodes during
the specified time. Even if no sensor nodes are
currently available at the time of the application’s
query request in the target region (i.e., sensor
voidance), the query will be given a chance to be
fired when any mobile node enters the target region
and transmits the sensor data back to the application.
To do this, the query processor will use both the
location information of the mobile nodes and the
time specification facility of the query language
according to the query processing procedure.
Figure 2 shows the EBNF format of the location-
aware time-constrained query expression added to
our previous SNQL construct. The application
specifies the types of sensor data to collect in the
SELECT clause (1); is specifies the information of
the target region in the FROM clause (2); and it sets
several conditions of the sensor data with a WHERE
clause (3).
Figure 2: Time-window query in SNQL.
The target region can be defined as any shape
using the spatial specifications and sophisticated
spatial operations in SNQL (Lim et al., 2014). The
spatial operator in SNQL is based on openGIS
(Herring, 2011), which describes a common
architecture for simple feature geometry. SNQL
supports spatial assignment facilities for specifying
irregularly shaped regions by name, and it provides
spatial operators such as the union, intersection and
minus operators to extend the expressiveness of a
query language.
The COLLECTION VALID FOR clause
specifies the time validity of a query in terms of the
time window (4). A time window can have one or
more time intervals, and a time interval is expressed
by the lower-time bound and upper-time bound (5).
In our present implementation of the location-aware
time-constrained query processing strategy, we
employ only the data type yyyy (year), MM
(month), dd (day), hh (hour) and mm (minutes) (6).
The NOW parameter denotes the time the query is
issued. Other temporal expressions and operations
can be utilized for better support of time window
operations, such as after, before, intersect,
difference, and union (Mkaouar et al., 2011). The
design of temporal operations is beyond the scope of
this paper.
<time-constrained-query> ::=
SELECT
<select-attribute-list>
(1)
FROM
<region>
(2)
[WHERE
<predicate>
](3)
[WITHIN <percentage> | CASE WHEN … THEN … ]
COLLECTION VALID FOR <time-window> (4)
<time-window> ::=
<time-interval> | <time-window> <time-interval>
<time-interval> ::= (5)
<lower-time-bound> | NOW,
<upper-time-bound> | NOW
<lower-time-bound> ::= <time>
<upper-time-bound> ::= <time>
<time> ::= <yyyy-MM-dd hh:mm> (6)
SolvingSensorVoidProbleminUncontrolledMobileSensorNetworks-DevelopmentofMobileSensorDatabaseSystems
49

3.2 Query Processing Technique
In this section, we introduce our query processing
scheme, which efficiently handles the sensor void
problem in uncontrolled MSNs. We describe the
procedure of the proposed location-aware time-
constrained query processing technique from the
query dissemination to the data collection stages.
3.2.1 Network Setup
Query routing and data aggregation methods in
stationary WSNs are typically found based on
various types of routing trees. In MSNs, on the other
hand, such routing trees can scarcely be constructed
and maintained due to the mobility of the sensor
nodes, such that the network topology is very likely
to be transient (Zeinalipour-yazti and Chrysanthis,
2009). The routing in MSNs can be modeled in
consideration of the scalability and energy
efficiency. The two-tier network model is known to
be feasible for both scalability and energy efficiency
(Gupta and Younis, 2003). The main theme of a
two-tier network model is clustering. In a cluster,
there is a cluster head and a number of member
nodes. The cluster head is responsible for data
collection and aggregation from other member
nodes. Cluster heads communicate with each other
for data aggregation and to route the sensor data to
the base station. Our network model uses the two-
tier architecture and divides the entire sensor
network into grid cell regions as uniquely
identifiable query targets. Our network model is
described below.
• All the sensor nodes are equal and have mobility,
and they move randomly within the sensor
network space . They have maximum
transmission range (MTR) which can directly
communicate with other neighboring sensor
node.
• Mobile sensor nodes are location-aware using
GPS or some localization mechanisms (Bulusu et
al., 2000). The location data will be evaluated
against the target data of the query whenever the
node enters a new cell region of grid.
• Sensor nodes are aware of the entire cell regions
of the network space , given as 2
×2
; where
k=log
(). This information is stored as meta-
data.
• The base station is stationary and its MTR covers
the overall sensor network space .
• A target cell region of a query is equal to one cell
region of the grid.
Different types of mobility can significantly
impact the query processing phases in MSNs (Di
Francesco et al., 2011; Zeinalipour-yazti and
Chrysanthis, 2009). In general, the mobility is
modeled in three categories: the deterministic,
partially deterministic, and fully random categories.
Deterministic mobility implies that the movement of
sensor nodes is predefined or can be perfectly
scheduled. The partially deterministic mobility
implies that the mobility patterns of mobile nodes
can be predicted by analyzing the traces of sensor
nodes. In the random mobility model, on the other
hand, the mobility of sensor nodes is entirely
unpredictable and is independent of the previous
movement and, thus, the sensor void situation is
most likely to arise. Modeling our uncontrolled
MSNs, we assume a random mobility model, in that
the sensor nodes randomly select the direction,
speed and travel time (Johnson and Maltz, 1996).
The density of sensor nodes is an important
parameter for the sensor void problem. The sparser
they are, the more probable the sensor voidance
problem becomes. We presume that high degrees of
sparseness prevail in most real-world applications
such that applications will encounter a high
probability of the sensor void problem. We
conducted an experiment to learn their co-relations,
as outlined in Section 4. It should be noted that the
density will not be even among the cell regions due
to the random movement of sensor nodes and that
the difference in the density among the cell regions
may change from time to time.
Figure 3: Sensor network topology model.
Our network model uses a two-tiered
architecture, as shown in Figure 3, and each cell
region may have a head node or none, and each may
have zero or several member nodes. A cell region
head (RH) is responsible for the collection and
aggregation of sensor data from the cell region
members (RM). We employ the scheme for head
selection introduced in earlier work (Nasser et al.,
2012). In that the mobility factor (1) is introduced to
select an RH, each node keeps track of its mobility
Region member
Base station
Region head
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
50
and records the number of movements it has made as
well as the amount of residual energy it has. A node
may change its cell region as a result of movement
and join a new cell region as an RM if there is an
RH in the new cell region. If the cell region is
empty, the node becomes an RH in the new cell
region. The number of times a node has moved over
cell regions and the number of location changes
along with the remaining energy are used to
calculate the mobility factor (M.F) of the mobile
nodes, as given below.
. =
×
.
>0 (1)
is the total number of region changes,
is
the total number of moves made during t seconds,
and
is the remaining energy. Each node keeps a
record of its mobility factor. A lower value of the
mobility factor indicates that the node is less mobile
and more of a candidate to become the RH. In
contrast, a higher value depicts frequent movements
and renders a node inconsistent as a RH. The region
head selection procedure starts at each node by
broadcasting its M.F. This broadcast is intended for
the members of the same region and is discarded by
others. Initially, each node keeps its own M.F as the
region head M.F. Once a broadcast is received, the
node compares the region head M.F with the one
received. If the received value is lower than the
current value, the region head M.F and region head
identifier are appropriately updated. At the end of
the broadcast phase, each node has knowledge of the
node with the lowest mobility factor; hence, the
node is considered as the region head. The lowest
value of the M.F ensures that the node will serve as
the region head for a longer duration. Therefore, the
number of procedures for the head selection process
can be minimized.
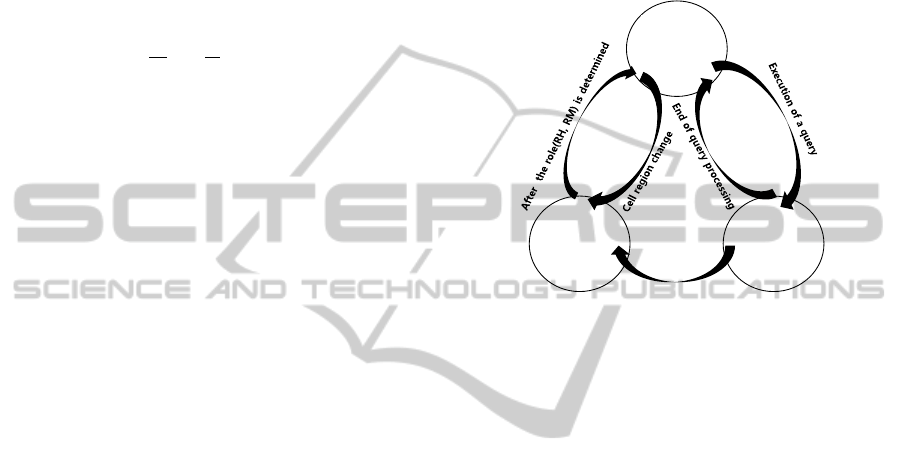
In our network model, there are three different
sensor node states as shown in Figure 4: idle,
sensing, and discovery. A state transition is triggered
by a cell region change of a sensor node or by the
execution of a query. When an RM leaves its current
cell region, it changes its status to discovery and
broadcasts a discovery message to the RH of the
new cell region. If it receives an acknowledgement
from the existing RH of the new cell region, it sends
its reference information, including its node
identification number and network information to
the RH. On the other hand, if the incoming sensor
node does not receive any acknowledgement of the
RH discovery message, this indicates that there is no
RH in the new cell region. Thus, it must take the role
of the RH of the new cell region. When an RH
leaves its current cell region, it broadcasts a beacon
to notify its members of its status. The RM after
receiving the broadcast changes its status to
discovery and elects a new RM following the same
procedure defined in the ‘region head selection’
procedure described above. The RH is in charge of
the collection and aggregation of the sensor data
from the RM. The sensor node is in sensing status
during the query execution phase and changes its
status to the idle status after finishing the execution.
Figure 4: State transitions of a mobile sensor node.
3.2.2 Query Processing Technique
Based on the uncontrolled MSN topology and head
election strategies given in Section 3.2.1, we
propose a location-aware time-constrained query
processing technique. The proposed query
processing strategy is composed of three phases: (1)
query dissemination, (2) query execution, and (3)
data return. The key idea is to give the mobile sensor
nodes the capability of holding queries for certain
durations that are specified in the time window of
the queries. As mentioned earlier, the time window
can be programmed by an application designer using
the SNQL query language construct for MSNs, as
described in Section 3.1.
1) Query dissemination: For a query request
from an application, the base station broadcasts the
query to the MSNs. We assume that the maximum
transmission range (MTR) of the base station is wide
enough to cover the entire sensor network space. All
of the sensors in the network receive the transmitted
query and check its target specification and the
validity of the time in the time window specification.
If the target cell region of a query matches the
current location of the sensor node, the RH
immediately executes the query and aggregates the
sensor data from the RMs. Otherwise, sensor node
stores it into its query table (QT) for later
evaluations. Figure 5 shows an example description
of a QT.
Idle
Discovery
(Head selection)
Sensing
(Query processing)
Cell region change
SolvingSensorVoidProbleminUncontrolledMobileSensorNetworks-DevelopmentofMobileSensorDatabaseSystems
51
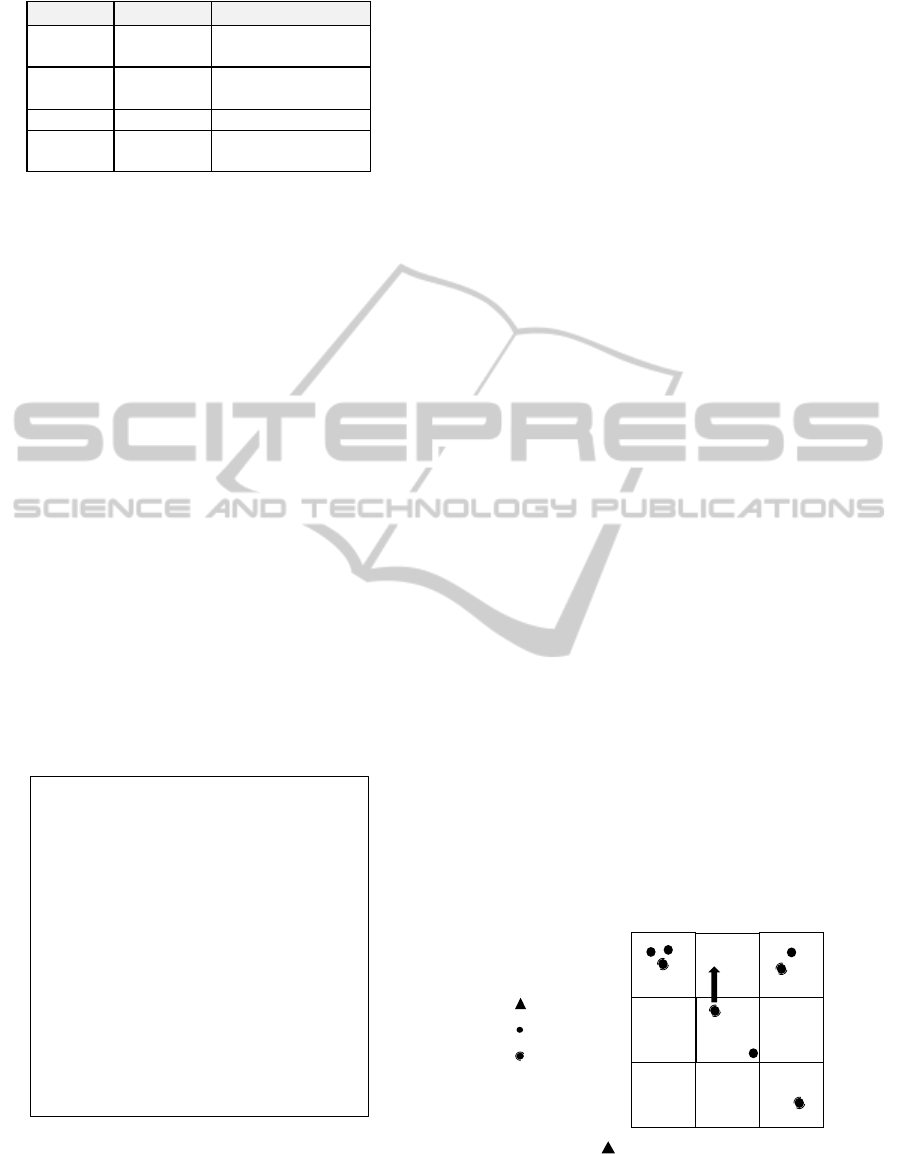
Figure 5: Example of a query table (QT).
The stored queries in the QT are evaluated for
possible execution in the matching target cell region
at some time. By doing so, the probability of the
sensor void problem (i.e., the data no-return rate)
can be greatly diminished. The mobile sensor node
checks the queries in the QT when it enters another
cell region.
2) Query execution: When a sensor node enters a
new cell region, it checks whether there is an RH in
the new region. If there is an RH, the sensor node
registers itself to the RH. If not, the sensor node by
itself serves as the RH in the new region and checks
the time validity of the query by comparing its time
window specification and the current time. As the
result, all of the timed-out queries will be deleted
from the QT, after which target region matching is
conducted by comparing the target data (i.e., the
region ID in the query table) and the current location
in the cell region just entered. When the time
validity and region matching are found to be true,
the query is executed for data collection. Figure 6
shows how the aforementioned query processing
procedure is implemented.
Figure 6: Execution of queries in the QT.
3) Data return: In contrast to the query
transmission procedure, the data return procedure
relies on a multi-hop fashion due to the limited MTR
of the sensor nodes. Furthermore, the random
mobility of the sensor nodes will cause frequent link
failure problems and the communication void
problems (i.e., a node with no neighbor closer to the
destination than itself) due to possible sensor void
cell regions during the data return processes. Our
data return strategy is based on a stateless
geographic routing protocol for mobile ad-hoc
networks (Karp and Kung, 2000). We designed the
data return procedure, as follows.
In our network model, only the RHs participate
in the routing process for returning sensor data to the
base station. When an RM finishes its query
execution, it sends the sensor data to the RH in the
same cell region. The RH which receives the sensor
data from the RM undertakes aggregation and starts
to send the data to the base station. When an RH as
the data holder returns sensor data to the base
station, it uses a stateless geographic routing
protocol by selecting the next data holder from
among the neighboring RHs which has the highest
positive forwarding cell region hop count (i.e., the
neighboring RH which is closest to the base station
is the next data holder). For a communication void
region in which the data holder itself has the highest
positive forwarding cell region hop count within the
maximum transmission range, it broadcasts a beacon
and holds the sensor data until there is a response
message from a neighboring RH which has a higher
positive forwarding cell region hop count.
At this stage, Figure 7 shows a situation in which
the data holder is in a communication void situation
and is moving out of the current cell region. In this
situation, the data holder (RM) sends the sensor data
to the RM in the new cell region. If the new cell
region is empty, the sensor node becomes an RH in
the new cell region. It then broadcasts a beacon and
holds the sensor data until there is a response
message from a neighboring RH which has a higher
positive forwarding cell region hop count.
Figure 7: Example of a data holder (RM) movement in
communication void situation.
Query ID Region ID Time window
0000150 754
02-09-2014 02:00
02-09-2014 03:15
0004033 367
02-08-2014 04:20
02-09-2014 04:30
.. .
. . . . . .
0000117 019
02-09-2014 02:45
02-09-2014 03:25
Algorithm
Sensor node moves to a new cell region
Check whether there is an ZH in the new cell region
if there is an ZH in the new region then
Register itself to the ZH in the new region
else
Take the role of an ZH in the new cell region
Check the time window of queries in the QT
if there is a timed-out query then
Delete the query from the QT
end if
Conduct target region matching of queries in the QT
if there is a matching query
(both the time validity and the region matching)
Execute the query
Remove the executed query from the QT
end if
end if
.
.
.
Current sensor data holder
Region member
Base station
Region head
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
52
4 EVALUATION
In this section, we show the experimental results of
the proposed location-aware time-constrained query
processing technique based on a grid-based two-tier
network model. Our experiment includes a
measurement of the occurrence ratio of the sensor
void problem. We also examined the ratio of
successful query executions in association with the
number of sensor nodes in a sensor network (i.e., the
node density), the velocity of the sensor nodes, and
the amount of validity time in terms of the time
window sizes.
For the experiment with the proposed location-
aware time-constrained query processing strategy,
we used MobiSim to generate a mobility trace
(Mousavi et al., 2007). MobiSim is a java-based
mobility management utility which was mainly
designed to investigate mobility issues in mobile ad-
hoc networks. We used a grid-based two-tier
network model and analyzed the mobility traces of
the sensor nodes.
Table 1: Experiment settings.
Parameters Values
Mobility pattern Random waypoint
Network size 1000 x 1000
Region size 100 x 100
Simulation(s) 10,000
Number of trials 50
Min speed(m/s) 1
Time window interval (s) Simulation dependent
Number of nodes Simulation dependent
Max speed(m/s) Simulation dependent
Table 1 shows the MobiSim experimental
parameters used here. The sensor network size was
set to 1000m * 1000m with a cell region size of
100m * 100m. We assume that the sensors have
random mobility. We set the minimum speed of the
sensor node to 1m/s with a maximum pause time of
100 seconds. In the experiment, we vary the number
of sensor nodes, the maximum speed of the sensor
node and the time window intervals. This result was
produced by averaging 50 experiments for each
parameter variable.
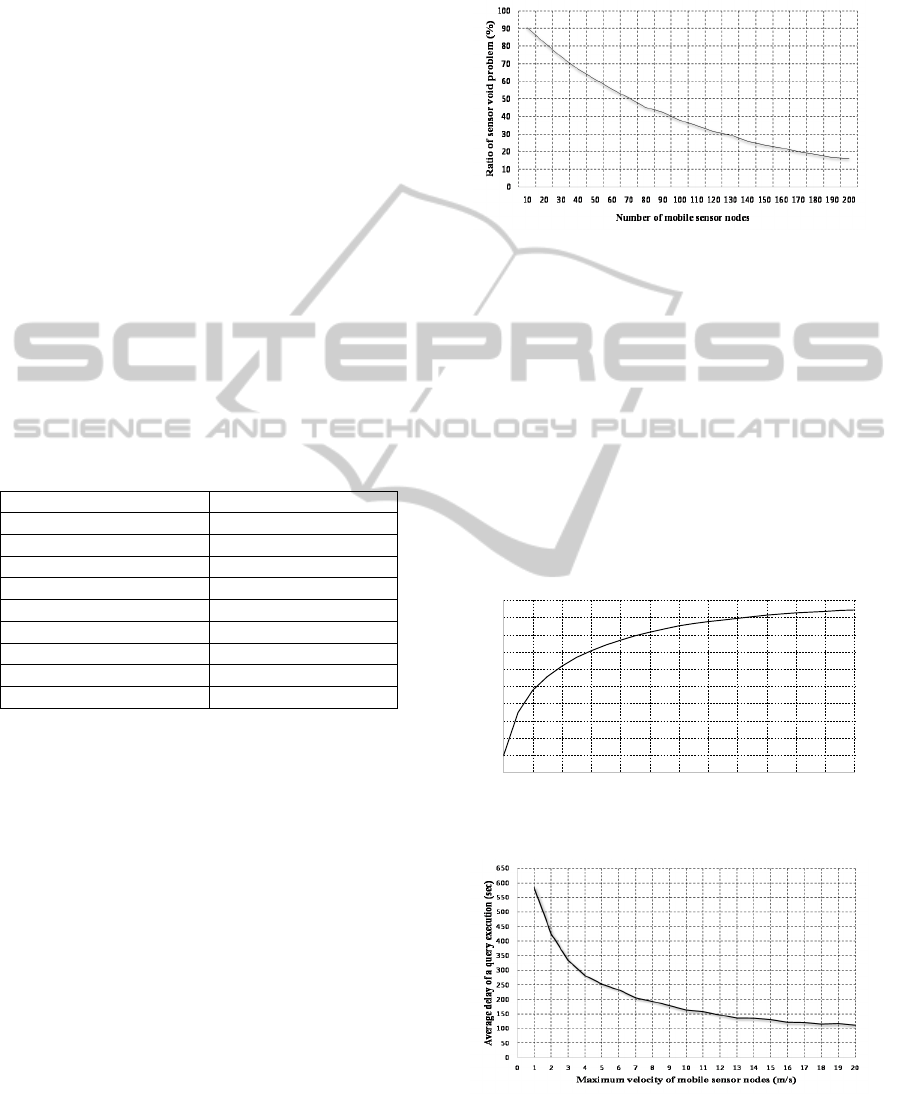
First, we examined the occurrence of a sensor
void situation depending on the number of sensor
nodes in the sensor network. We set a single cell
region as the target region to be queried. The target
region is randomly selected in this experiment. As
shown in Figure 8, as the number of sensor nodes
increases, the ratio of sensor voidance decreases.
This is obvious, because the sensor void situation is
quite proportional to the average density of mobile
sensor nodes, that the size of the cell region and the
size of the network space will show similar ratios.
Figure 8: Sensor voidance ratio on network density.
Second, we examined the average time of sensor
void recovery depending on the size of the time-
window interval. This experiment shows that the
rate of successful query execution depends on the
amount of time validity specified in the time
windows, as shown in Figure 9. For this experiment,
we set the maximum speed of the sensor node to
5m/s and number of sensor nodes to 10. We verified
that a longer validity time led to a higher the rate of
successful query executions, as the time window
interval becomes large and thus the probability of
the inflow of the sensor node in the target region is
increased.
Figure 9: Query execution rate on time window intervals.
Figure 10: Average delay of a query execution on the
maximum velocity of mobile sensor nodes.
0
10
20
30
40
50
60
70
80
90
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400
Rate of query execution (%)
Time window interval (sec)
SolvingSensorVoidProbleminUncontrolledMobileSensorNetworks-DevelopmentofMobileSensorDatabaseSystems
53

Finally, we conducted an experiment on how the
maximum velocity of mobile sensor nodes can affect
the recovery rate of the sensor void situation. We
increased the maximum velocity of the sensor node
from one to twenty and checked the average delay in
the query execution. Figure 10 shows that a faster
mobile sensor node leads to a lower average delay
for query executions. This is derived from the fact
that the sensor is more likely to flow into the target
region if the sensor has higher velocity.
5 CONCLUSIONS
In this paper, we propose a sensor database system
for MSNs with uncontrolled mobile sensor nodes. In
contrast to a stationary sensor network, the
availability of sensor nodes in the target region is not
guaranteed in a mobile sensor network, and the
random mobility issue gives rise to difficulties in
sensor database management, which is referred to as
the sensor void problem in this paper. In this paper,
we have proposed a location-aware time-constrained
query processing technique which is highly effective
for handling the sensor void situation of sparse
MSNs with uncontrolled mobile sensor nodes. We
have demonstrated the proposed query processing
procedure in operational phases for query
dissemination, execution, data collection and
aggregation, and data return. Our experiments show
that various mobility parameters are correlated with
the occurrence rates of sensor void situations.
Finally, we plan to develop our query processing
strategy further and implement more functions into
our mobile sensor network database management
system.
ACKNOWLEDGEMENTS
This work was supported by ICT R&D program of
MSIP/IITP. [B0101-14-0334, Development of IoT-
based Trustworthy and Smart Home Community
Framework]
REFERENCES
Abdelzaher, T., Anokwa, Y., Boda, P., Burke, J. A.,
Estrin, D., Guibas, L., Reich, J., 2007. Mobiscopes for
Human Spaces. Pervasive Computing, 6(2), pp.20–29.
Andreou, P., Zeinalipour-Yazti, D., Chrysanthis, P. K.,
Samaras, G., 2011. In-network data acquisition and
replication in mobile sensor networks. Distributed and
Parallel Databases, 29(1-2), pp.87–112.
Bulusu, N., Heidemann, J., Estrin, D., 2000. GPS-less low-
cost outdoor localization for very small devices.
Personal Communications, IEEE, 7(5), 28-34.
Campbell, A. T., Eisenman, S. B., Lane, N. D., Miluzzo,
E., Peterson, R. A., 2006. People-centric urban
sensing. Proceedings of the 2nd annual international
workshop on Wireless internet - WICON ’06, p.18–es.
Changbai, C., Jaehyoung, L., Juyeon, H., Insung, J.,
Minsoo, K., Hyun, S. J., 2008. SNQL: A Query
Language for Sensor Network Databases. In
Proceedings of the 7th WSEAS International
Conference on Telecommunications and Informatics,
pp. 114-119.
De Zoysa, K., Keppitiyagama, C., Seneviratne, G. P.,
Shihan, W. W. A. T., 2007. A public transport system
based sensor network for road surface condition
monitoring. Proceedings of the 2007 workshop on
Networked systems for developing regions - NSDR
’07, p.1.
Di Francesco, M., Das, S.K., Anastasi, G., 2011. Data
Collection in Wireless Sensor Networks with Mobile
Elements. ACM Transactions on Sensor Networks,
8(1), pp.1–31.
Diallo, O., Rodrigues, J. J. P. C., Sene, M., Lloret, J.,
2013. Distributed database management techniques
for wireless sensor networks.
Gupta, G., Younis, M., 2003. Load-balanced clustering of
wireless sensor networks. IEEE International
Conference on Communications, 2003. ICC ’03., 3,
pp.1848–1852.
Herring, E.J.R., 2011. Open Geospatial Consortium Inc .
Status : Corrigendum Category : OpenGIS ®
Implementation Standard OpenGIS ® Implementation
Standard for Geographic information - Simple feature
access - Part 1 : Common architecture.
Johnson, D. B., Maltz, D. A., 1996. Dynamic source
routing in ad hoc wireless networks. In Mobile
computing, pp. 153-181, Springer US.
Karp, B., Kung, H.T., 2000. GPSR : Greedy Perimeter
Stateless Routing for Wireless Networks. In
Proceedings of the 6th annual international conference
on Mobile computing and networking, pp. 243-254.
LIM, C. S., LEEb, J. H., PARK, M., HYUN, S. J., 2014.
Design and Implementation of Spatial Operators and
Energy-efficient Query Processing Strategy in
Wireless Sensor Network Database System.
Madden, S.R., Franklin, M.J., Hellerstein, J.M., 2004.
TinyDB : An Acquisitional Query Processing System
for Sensor Networks
1. , V(212).
Mkaouar, M., Bouaziz, R., Moalla, M., 2011. Querying
and manipulating temporal databases.
Mousavi, S. M., Rabiee, H. R., Moshref, M.,
Dabirmoghaddam, A., 2007. Mobisim: A framework
for simulation of mobility models in mobile ad-hoc
networks. In Wireless and Mobile Computing,
Networking and Communications, 2007. WiMOB
2007, pp. 82-82.
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
54

Nasser, N., Al-Yatama, A., Saleh, K., 2012. Zone-based
routing protocol with mobility consideration for
wireless sensor networks. Telecommunication
Systems, 52(4), pp.2541–2560.
Nittel, S., Trigoni, N., Ferentinos, K., Neville, F., Nural,
A., Pettigrew, N., 2007. A drift-tolerant model for data
management in ocean sensor networks. Proceedings of
the 6th ACM international workshop on Data
engineering for wireless and mobile access - MobiDE
’07, p.49.
Valkanas, G., Gunopulos, D., Galpin, I., Gray, A. J.,
Fernandes, A. A., 2011. Extending query languages
for in-network query processing. Proceedings of the
10th ACM International Workshop on Data
Engineering for Wireless and Mobile Access -
MobiDE ’11, p.34.
Zeinalipour-Yazti, D., Chrysanthis, P. K., 2009. Mobile
sensor network data management. In Encyclopedia of
Database Systems (pp. 1755-1759), Springer US.
SolvingSensorVoidProbleminUncontrolledMobileSensorNetworks-DevelopmentofMobileSensorDatabaseSystems
55
