
Agents Displacement in Arbitrary Geometrical Spaces
An Evolutionary Computation based Approach
Francesco D’Aleo
1
, Fabio D'Asaro
1
, Valerio Perticone
1
, Giovanni Rizzo
1
and Marco Elio Tabacchi
1,2
1
Dip. di Matematica ed Informatica, Università degli Studi di Palermo, Palermo, Italy
2
Ed Istituto Nazionale di Ricerche Demopolis, Demopolis, Italy
Keywords: Agent-based Modeling, Optimization.
Abstract: In many different social contexts, communication allows a collective intelligence to emerge. However, a
correct way of exchanging information usually requires determined topological configurations of the agents
involved in the process. Such a configuration should take into account several parameters, e.g. agents
positioning, their proximity and time efficiency of communication. Our aim is to present an algorithm,
based on evolutionary programming, which optimizes agents placement on arbitrarily shaped areas. In order
to show its ability to deal with arbitrary bi-dimensional topologies, this algorithm has been tested on a set of
differently shaped areas that present concavities, convexities and obstacles. This approach can be extended
to deal with concrete cases, such as object localization in a delimited area.
1 INTRODUCTION
In an agent simulation, just as in real social contexts,
communication among individuals is one of those
characteristics that can enhance survival as well as
performances fitness-wise (Caci et al., 2011, Cardaci
et al., 2013, Tabacchi et al., 2010, Villata et al.,
2012). Communication allows a collective
intelligence to emerge, as it has been shown by
research on insects and using animat (Bonabeau et
al., 1999).
In many scenarios it is necessary to transmit
messages to a number of distinct intermediaries
(while other information can be delivered to many
agents at the same time using broadcast mode, Terna
& Taormina, 2007), due to the distance between
individuals. The concept of distance itself can be put
into question: in nature, distances are usually
regarded as “physical” distances, while in other
scenarios this concept can be readily extended; for
instance, consider the cost of a link between two
computers (Barabási, 2002), the energy cost of a
biological link between cells (Albert, 2005), or even
between concepts (Petrou et al., 2010). Further
problems can be caused by the presence of natural or
artificial obstacles between two individuals, or even
by a limited channel capacity.
In our proposed scenario, several agents inhabit
an arbitrarily shaped environment populated by
obstacles, and they can only communicate through
intermediaries lying at some maximal distance one
from another; each of such intermediaries is able to
receive messages from several sources and forward
them to other individuals in the designed area. This
is a broadcast kind of transmission: in order to reach
the destination, a single individual forwards the
received message to several intermediaries, ensuring
some desirable characteristics such as the robustness
and reliability of the ensuing network.
The number of agents in such a network is
usually variable, and it is necessary to consider the
possibility that some specific agents could reach a
huge number of other agents lying at a reasonable
distance, and at the same time to have a low number
of errors due to the transmission medium and to
episodes such as the temporary inactivation of an
agent or even its permanent removal from the
network. Therefore it is not out of place to draw an
analogy with social networks dynamics: in our case,
intermediaries behave just like hubs making possible
for distant nodes, which would otherwise have
difficulties to reach each other, to communicate.
A central parameter to consider, if we are to
assess the network evolution in time, is the
minimum number of agents needed to reach every
agent in the network; finding an optimal value
without introducing errors or noise in the signal is a
198
D’Aleo F., D’Asaro F., Perticone V., Rizzo G. and Elio Tabacchi M..
Agents Displacement in Arbitrary Geometrical Spaces - An Evolutionary Computation based Approach.
DOI: 10.5220/0005230601980202
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 198-202
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

notoriously hard problem (Tabacchi & Termini,
2011). On the other hand, if we consider the network
arrangement in space, the topology of the
environment – that is, the absolute (with respect to
space) and relative (with respect to other agents)
position of each agent – has to be carefully taken
into account. Optimal and sub-optimal solutions to
well-known and highly idealized situations are
already available in literature, including Steiner’s
Tree (Hwang et al., 1992); however, it is harder to
deal with harsher, possibly non-convex, non-
contiguous, and/or arbitrarily complex areas.
In these cases, a soft-computing technique
(Seising and Tabacchi, 2013) such as evolutionary
programming (Michalewicz, 1996) could provide
sub-optimal solutions in a reasonable amount of
time. Evolutionary algorithms in general, and
especially genetic algorithms, are already
successfully applied to a huge number of
optimization problems and they are proven of being
capable to efficiently find “good” solutions, i.e.
solutions that closely approximate the best one.
In this work we propose a preliminary version of
an evolutionary algorithm, which serves to optimize
the number and position of agents in arbitrarily
shaped areas, possibly populated by obstacles.
Results have shown how the algorithm satisfies sub-
optimality criteria as well as strong connectivity
requirements and were also obtained in an efficient
way. Even more, the algorithm tries to optimize the
number of agents, removing the superabundant ones
from the map.
This article is organized as follows: in the next
section we shall describe in detail the problem we
are concerned with and the approach we chose to
face it. In the third section we shall present the
algorithm as we implemented it, while analyzing the
principal mechanisms regulating agents and entities
of the simulation. Last section is devoted to
conclusions and to possible further developments of
this work. Some alternative methodologies and
different approaches to this very problem are
discussed and it will be pointed out how this work
can be applied to problems of a very different nature
than the one considered here.
2 METHODOLOGY
In the study and analysis of an ideal network, it is
crucial to focus on the first stages of its creation,
since the initial topology can have a severe impact
on network functionalities and evolution, as well as
on its principal entities, i.e. those nodes establishing
interconnections among peers.
Amongst the fundamental aspects to be
considered we should mention the minimization of
the number of entities involved in the peer-
communication process, which plays an important
role during the construction stage. In fact, an
excessive number of agents can lead to some
inconveniences (already well-known in information
theory) such as information redundancy and
corruption due to signal degradation. However,
decreasing the number of entities should not
compromise the connection between them —
therefore it turns out to be indispensable to evaluate
the proportion between number of nodes and
available space.
Another point that should be carefully taken into
account is that network topology could contemplate
the presence of hubs, which play a fundamental role
for the reasons discussed in the introduction;
however, the number of hubs in a network should
not exceed a critical limit, since otherwise we would
get an inefficient network due to the redundancy of
some connections.
Some mathematical models to deal with
canonically shaped areas are already known in
literature; they allow to find the “best” (with regard
to communication efficiency and total number of
entities) way of positioning entities in such highly
idealized scenarios, though this formally restricts the
possible choices by presenting characteristics that
are not modifiable by those entities moving in the
arbitrarily shaped spaces.
Considering all the limits and problems arising in
such situations, it comes as no surprise that finding
the optimal solution is a computationally unfeasible
problem. However, we can find suboptimal solutions
in a reasonable amount of time using evolutionary
programming techniques. In particular, in the next
section we shall introduce and discuss a procedure
that employs an evolutionary algorithm augmented
by hill-climbing, of which many variants are
available.
Even though a full detailed description of the
algorithm is the focus of the next chapter, we want
to highlight that the algorithm plays a crucial role
because of its capacity of satisfying all the requisites
mentioned before. This very algorithm acts as a
leader, imposing a direction for the entities to move,
without asking them to act in a precise way. The
leader also evaluates the solution at each stage of the
process, using a fitness function, which is based on
an evaluation of the total area covered by each
agent.
Some motivation for the leader to be
AgentsDisplacementinArbitraryGeometricalSpaces-AnEvolutionaryComputationbasedApproach
199

implemented through a genetic algorithm comes
from the fact that similar approaches were already
successfully used in various areas such as wire
routing, scheduling, adaptive control, game playing,
cognitive modeling, transportation problems,
traveling salesman problems, optimal control
problems, database query optimization (for a review
see Michalewicz, 1996).
Single agents, on the other hand, are
implemented through the already mentioned hill-
climbing algorithm, that is, a greedy algorithm
which at each iteration chooses the best state,
leading every time to a better (or, at least, non-
worse) solution.
Unlike a gradient-descending technique, we
chose the possibility of introducing a tabu search
variant to avoid repeated actions.
3 ALGORITHM
The idea behind our algorithm is to initially set up
the map in a way derived from the optimal solution
for a canonical shape surrounding the area we are
considering. For such shapes we can indeed use
some well known algorithms about Convex Hull
problem in a bi-dimensional plane. Such algorithms
are based on several differential and computational
geometry theorems (Vazirani, 2001). In particular,
Groemer’s theorem (Groemer, 1960) establishes a
relation between an area and the number of nodes
that are needed to cover (compact or convex) parts
of it. However, efficient algorithms in the more
general case of non-convex, non-compact areas are
not known.
In this work, the “optimal solution” is considered
as a starting point from which it is then possible to
calculate, through refinements, the desired sub-
optimal solution for the real area in consideration.
The refining procedure consists of moving the
agents in every possible way in a pre-defined
neighborhood, while verifying whether the new
placements leads to an improvement of the general
connectivity status. More precisely, agents are able
to move in their neighborhood according to a turn-
based mechanism.
At each turn the leader, which cannot be
identified with any agent and which therefore
constitutes an external entity, evaluates whether it is
necessary to order a movement or not. Such
broadcast communication forces all the agents to
make a displacement, providing them useful
information about their neighborhood.
It should be carefully noticed that in some
Table 1: Highlights of the algorithm.
1. Set up the agents in a way derived from the
optimal solution, as suggested by Groemer’s
Theorem;
2. Moving the agents in every possible way in a
pre-defined neighborhood and recalculate the
fitness function;
3. Repeat step two until find the sub-optimal
solution. Any configurations loop are avoided
using the tabu search;
4. Remove one of the agents and recalculate the
fitness function;
5. Repeat step four until find a configuration with a
fitness function better or worse, however, not
more than a certain tolerance (5%) compared to
the solution of the previous iteration.
situations the presence of an agent could turn out to
be redundant; these superabundant agents should be
removed from the map, since every such agent bears
a cost.
Our leader can take into consideration this
important factor by progressively removing
redundant components, i.e. those that carry no
significantly contribution to the improvement of the
global solution. The "greedy" procedure described in
steps 4—5 is clearly order-dependent since the order
in which the antennas are sequentially taken off
might affect the final result. In fact, we could
perform an exhaustive (hence, order-independent)
search of the optimal set of antennas to be removed
instead. However, such a process would be
unfeasible computationally wise, while our "greedy"
procedure, even though order-dependent, is more
efficient and approximates the theoretical optimum
with sufficient precision. The presence of a leader
provides the possibility of reducing the network’s
size without having to care about conflicts between
agents and/or spontaneous deletion of single nodes.
The main parameters involved in this
computation are: the initial distance between agents,
the minimum distance allowed between different
agents, the size of the neighborhood. These
parameters are set at the beginning of the simulation
and remain fixed during the entire execution of the
procedure. The leader only considers the first of
these three variables, while the latter two are
broadcasted to each single agent.
Simulation halts whenever the leader stops
communicating relevant information to the agents.
Such process is asynchronous due to the indirect
nature of the communication. Once this
organizational process is over, agents can go on
exchanging information in an efficient way,
expPloiting the new optimized network topology
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
200
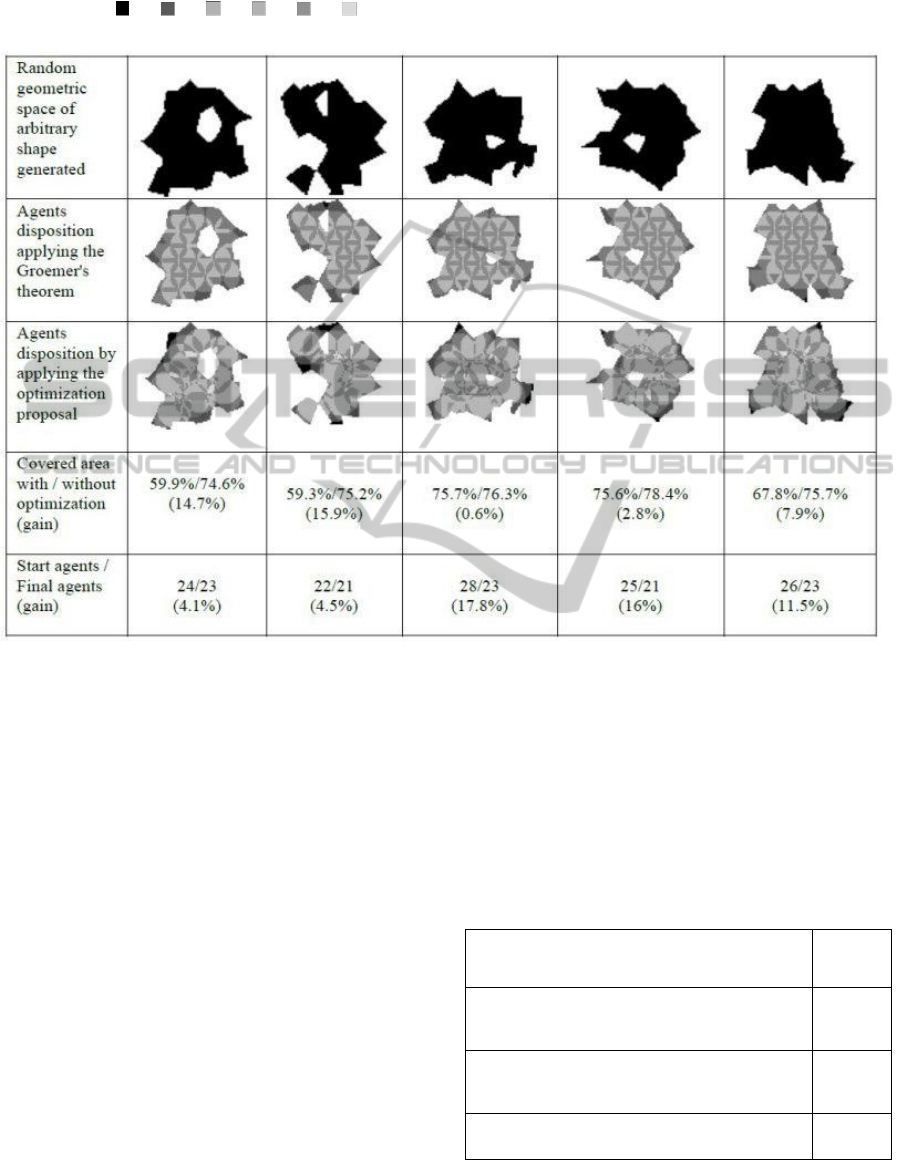
Table 2: Results obtained from pseudo-random generated samples. In the second row the area covered by agents is shown
using Groemer’s Theorem. Each grey level represents the number of agents covering the underlying area, according to the
following scale: =0, =1, =2, =3, =4, =5 or more. In the third row the disposition of agents after optimization is
shown.
4 CONCLUSIONS
A first collection of tests carried out in a simulated
environment confirmed the soundness of our
algorithm. This reinforces the hypothesis about the
validity of abstract mathematical models when they
are applied to social areas such as information
exchange.
If a suitable set of parameters is chosen, this
approach can be readily extended to other fields, e.g.
object localization in a three-dimensional
environment.
Further developments of this work could
contemplate the possibility of putting aside the
leader and making single agents independent. In this
case they will be free to decide action timing and to
start/resolve conflicts to eliminate superfluous
agents. Obviously this would lead to a new set of
(computational) issues related to the observance of
global constraints, which however might be
conveniently handled through information exchange
between agents.
Furthermore, fuzzy sets theory can be fruitfully
applied to this framework by using a suitable
membership function wherever required (D’Asaro et
al., 2013a, D’Asaro et al., 2013b). In this way, it is
possible to find a suitable solution even when an
external constraint prevents the fitness function from
being maximized.
Table 3: Aggregated results from a pseudo-random
generated sample.
Sample
N =
1.000
Average (Standard Deviation) of the
coverage for 3 or more agents using the
Groemer’s theorem
62.29%
(8.53%)
Average (Standard Deviation) of the
coverage for 3 or more agents using the
algorithm proposed
71.17%
(5.94%)
Average (Standard Deviation) of the number
of removed agents
10.82%
(5.66%)
AgentsDisplacementinArbitraryGeometricalSpaces-AnEvolutionaryComputationbasedApproach
201

REFERENCES
Albert, R. (2005). Scale-free networks in cell biology.
Journal of cell science, 118(21):4947–4957.
Barabási, A. L. (2002). Linked: The New Science of
Networks. Basic Books.
Bonabeau, E., Dorigo, M., Theraulaz, G. (1999). Swarm
intelligence. Oxford.
Caci, B., Cardaci, M., Tabacchi, M. E. (2011). Facebook:
topology to personality and back – an actor-based
simulation. In Kokinov, B., Karmiloff-Smith, A., and
Nersessian, N. (eds.) European Perspectives on
Cognitive Science. New Bulgarian University Press.
Cardaci, M., Fiordispina, M., Perticone, V., Tabacchi,
M.E. (2013). Reti sociali, informazioni individuali.
Una simulazione basata su agenti, metodologia fuzzy e
Computing With Words. In Auricchio A., Cruciani
M., Rega A., Villani M. (eds.) Atti del Convegno
AISC 2013, pp. 71—77.
D'Asaro, F. A., Perticone, V., & Tabacchi, M. E. (2013a,
August). A fuzzy methodology to alleviate
information overload in eLearning. In 8th conference
of the European Society for Fuzzy Logic and
Technology (EUSFLAT-13). Atlantis Press.
D'Asaro, F. A., Perticone, V., Tabacchi, M. E., & Termini,
S. (2013b). Reflections on Technology and Human
Sciences: rediscovering a common thread through the
analysis of a few epistemological features of
fuzziness. Archives for the Philosophy and History of
Soft Computing, (1).
Groemer, H. (1960). Über die einlagerung von kreisen in
einen konvexen bereich. Mathematische Zeitschrift,
73(3):285–294.
Hwang, F., Richards, D., and Winter, P. (1992). The
Steiner Tree Problem. Annals of Discrete
Mathematics. Elsevier Science.
Michalewicz, Z. (1996). Genetic algorithms + data
structures = evolution programs. Springer.
Petrou, M., Tabacchi, M. E., Piroddi, R. (2010). Networks
of Concepts and Ideas. The Computer Journal,
53(10):1738--1751.
Russell, S., Norvig, P. (2010). Artificial Intelligence: A
Modern Approach. Prentice-Hall.
Seising, R., Tabacchi, M. E. (2013). A very brief history
of soft computing. In Pedrycz, W. and Reformat, M.
(eds.) 2013 Joint IFSA World Congress NAFIPS
Annual Meeting. IEEE SMC.
Tabacchi, M. E., Caci, B., Cardaci, M. (2010).
Comportamenti individuali e connettivi in Facebook:
uno studio simulativo. In Ferrari, G., Bouquet, P.,
Cruciani, M., and Giardini, F. (eds.) Pratiche della
Cognizione - Atti del Settimo Convegno Nazionale di
Scienze Cognitive, pp. 266--270. AISC.
Tabacchi, M. E., Termini, S. (2011). Measures of
fuzziness and information: some challenges from
reflections on aesthetic experience. In Proceedings of
WConSC 2011.
Terna, P., Taormina, R. (2007). Modelli di simulazione
con agenti intelligenti: il sorprendente mondo dei
camaleonti. In Sistemi Intelligenti, vol. 19, pp. 391--
426. Il Mulino.
Vazirani, V. V. (2001). Approximation algorithms.
Springer.
Villata, S., Falcone, R., Da Costa Pereira, C.,
Castelfranchi, C., Tettamanzi, A., Paglieri F. (2012).
Comunicazione e fiducia: un modello ad agenti su
qualità delle informazioni e valutazione delle fonti. In
Paglieri, F. (ed.) Sistemi Intelligenti, vol. 24, pp. 559--
579. Il Mulino.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
202
