
Towards Non-intrusive Composition of Executable Models
Henning Berg and Birger Møller-Pedersen
Department of Informatics, University of Oslo, Oslo, Norway
Keywords:
Model Composition, Languages, Domain-specific Modelling, Runtime.
Abstract:
An essential operation in model-driven engineering is composition of models and their metamodels. There
exist several mechanisms for model composition. However, most of these only consider composition of either
models or metamodels and not both kinds of models simultaneously, and do not address how the composition
impacts modelling artefacts like editors, transformations and semantics. Moreover, model composition mech-
anisms typically deal with model structure and do not consider operational semantics. In this paper, we discuss
a novel approach for the composition of both models and metamodels in a virtually non-intrusive manner. We
achieve this by utilising a placeholder mechanism where classes in one metamodel may represent classes of
another. The ideas presented have been validated by the construction of a framework. We will illustrate how
non-intrusive composition allows linking the operational semantics of different languages without rendering
existing modelling artefacts inconsistent. This increases the flexibility in how languages can be combined, and
reduces the amount of necessary changes of tools and other modelling utilities.
1 INTRODUCTION
Metamodel composition is an important operation in
metamodelling. In the course of the last decade,
several mechanisms for composition of models and
metamodels have been devised, e.g. (Morin et al.,
2009)(Fleurey et al., 2008)(Kolovos et al., 2006)(Gro-
her and Voelter, 2007). However, most of the mecha-
nisms work either on the model or on the metamodel
level, and do not consider composition of both kinds
of models simultaneously. Specifically, metamodel
composition mechanisms do not address how exist-
ing models can be combined as their metamodels are
composed. A consequence of this is that the mod-
els are rendered invalid as they are not valid instances
of the composite metamodel resulting from the com-
position process. Other artefacts in the metamod-
elling ecosystem like editors (concrete syntax), se-
mantics (including constraints), transformations and
code generators are also impacted when metamodels
are composed. The reason is that these artefacts are
defined relatively to a metamodel. Typically, each of
these artefacts needs to be refactored to comply with a
composed metamodel. Ideally, artefacts in the ecosys-
tem should be aligned with new metamodel variants
automatically by utilising information from the com-
position process. Similar considerations are discussed
in (Di Ruscio et al., 2012)(Garca et al., 2013)(Demuth
et al., 2013).
A natural evolution of composition mechanisms
is the ability to consider model composition both at
the metamodel and model levels. Put differently, a
composition mechanism should govern the composi-
tion of metamodels and their models. This requires
the composition mechanism to work explicitly on two
abstraction levels where composition-specific direc-
tives, as required to compose (meta)models, are prop-
agated and utilised for composition of models.
Meta Object Facility (MOF) (OMG, 2014) is the
most prominent architecture for classification of mod-
els according to abstraction levels. In this architec-
ture, metamodels reside on the M
2
level, whereas the
models reside on the M
1
level. A model contains ob-
jects which are instances of classes in its metamodel.
Thus, a model is classified by its metamodel. In the
literature, this is typically referred to as the conform-
sTo relationship. A mechanism that supports com-
position of metamodels and the conforming models
would work on both the M
2
and M
1
levels, respec-
tively.
In this paper, we discuss how metamodels and
models may be composed virtually non-intrusively.
What this means is that metamodels and models are
kept separate, yet they are composed through a set of
implicitly defined mappings which allow specifying
proxy classes. A proxy class in one metamodel rep-
resents a class in another metamodel. The approach
only requires a minimal refactoring of existing arte-
111
Berg H. and Møller-Pedersen B..
Towards Non-intrusive Composition of Executable Models.
DOI: 10.5220/0005242401110121
In Proceedings of the 3rd International Conference on Model-Driven Engineering and Software Development (MODELSWARD-2015), pages 111-121
ISBN: 978-989-758-083-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

facts which may be perfomed automatically or semi-
automatically. The essence of our approach is the
ability to link the operational semantics of languages,
so that models/programs of different languages can
interact at runtime. The ideas presented are applicable
to metamodelling environments that allow express-
ing the operational semantics of a metamodel/lan-
guage using an object-oriented action language, e.g.
the Eclipse Modeling Framework (EMF) (EMF, 2014)
and Kermeta (Muller et al., 2005). The approach has
been validated by the construction of a prototypical
framework on top of EMF. We will use this frame-
work and show how the behaviour of classes/objects
in a General-Purpose Language (GPL) can be defined
by models expressed in a domain-specific State Ma-
chine Language (SML).
The paper is organised as follows. In Section 2
we define our non-intrusive composition mechanism.
We then introduce an example in Section 3 and use it
to illustrate the ideas and the mechanics of the frame-
work in Section 4. An evaluation of the composition
mechanism follows in Section 5, and in Section 6 we
discuss our approach in relation to existing work in
the field. Finally, in Section 7 we summarise and con-
clude the paper.
2 DEFINITIONS
Traditional (meta)model compositon mechanisms are
explicit in the sense that structural elements from dif-
ferent constituent models are interwoven, e.g. two
classes from different metamodels may be merged
or a class may be made a subtype of another class.
As motivated, this has consequences with respect to
other entities in the metamodelling ecosystem. The
mechanism presented in this paper works by estab-
lishing mappings between metamodels and models in
a practically non-intrusive manner. This means that
the composition is lifted away from the modelling
space and established using a separate specification.
There are two types of mappings: M
2
-mappings and
M
1
-mappings. The names reflect the MOF level on
which the mappings occur. That is, M
2
-mappings are
created between metamodel structures, whereas M
1
-
mappings are created between model structures (ob-
jects of the classes in the metamodels). Both types
of mappings can be expressed by non-injective partial
functions. M
2
-mappings are described in a Unifica-
tion Model (UM), while M
1
-mappings are described
in a Linking Model (LM).
Definition 1. An M
2
-mapping is a uni-directional
or bi-directional binding between two structural el-
ements, τ
x
and π
y
, in two different metamodels. A
structural element is a package, class, attribute, op-
eration or parameter. A bi-directional binding may
be decomposed into two uni-directional bindings. For
uni-directional bindings, τ
x
is the source element and
π
y
is the target element. For bi-directional bindings,
τ
x
and π
y
are both source and target elements corre-
sponding to decomposition of the bi-directional bind-
ing into two uni-directional bindings.
: hτ
1
7→ π
1
i(uni − directional)
: hτ
1
↔ π
1
i (bi −directional)
where τ
x
and π
x
are on either of the forms (N being a
name):
: hN
package
, N
class
i
: hN
package
, N
class
, N
attribute
i
: hN
package
, N
class
, N
operation
i
: hN
package
, N
class
, N
operation
, N
parameter
i
Definition 2. A unification point is a collection of M
2
-
mappings between two classes in two different meta-
models. A unification point is either asymmetric or
symmetric. The source class of an asymmetric unifi-
cation point is referred to as a proxy as it represents
a placeholder for the target class. The two classes
of a symmetric unification point represent compatible
types. A unification point is only valid if both classes
share a common equivalent structure. A class may be
part of an arbitrary number of unification points. A
unification point χ can be modelled as a set of map-
pings:
χ
a
: hτ
1
7→ π
1
, τ
2
7→ π
2
, ..., τ
n
7→ π
n
i (asymmetric)
χ
s
: hτ
1
↔ π
1
, τ
2
↔ π
2
, ..., τ
n
↔ π
n
i (symmetric)
Definition 3. The (partial) equivalent structure of a
unification point is a set of attributes, operations and
operation parameters that both related classes of the
unification point need to have. Two classes C
1
(proxy)
and C
2
(classes are considered as sets of attributes,
references and operations) of two metamodels may be
unified if:
∀s
1
∈ C
1
· ∃s
2
∈ C
2
→ s
1
∼ s
2
where ∼ : S × S → Bool is a recursive partial func-
tion that is true if its two arguments have an iden-
tical structure. For symmetric unification points,
C
1
and C
2
have to be equipotent, that is: | C
1
|=|
C
2
|. S is a set of structural elements: S =
{Class, Attribute, Re f erence, Operation, Parameter}.
Definition 4. A Unification Model (UM) unifies an
arbitrary number of metamodels. It consists of one
or more unification points. Two given metamodels
may be unified with one or more unification points.
The Unification Model comprises a set of unification
points:
UM : hχ
1
, χ
2
, ..., χ
n
i
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
112

Definition 5. An M
1
-mapping ϕ is a bi-directional
binding between two model elements (objects), with
identifiers i and j, in two models x and y. An identifier
encompasses both the class name for which the object
is an instance and a unique integer designator.
ϕ : O
x
i
↔ O
y
j
, i, j ∈ I
where I is a set of tuples on the form:
hClassName, NaturalNumberi. Inheritance of
attributes and operations (including overriding) is
supported (e.g. binding to an operation specified in a
superclass to ClassName).
Definition 6. The Linking Model comprises a set of
M
1
-mappings between an arbitrary number of mod-
els:
LM : hϕ
1
, ϕ
2
, ..., ϕ
n
i
Figure 1 illustrates non-intrusive composition.
The figure has three metamodels and models of these.
The C
4
(proxy) class in MM
1
is unified asymmetri-
cally with the D
1
class in MM
2
, whereas the (proxy)
class D
3
in MM
2
is unified asymmetrically with the
class E
1
in MM
3
. The classes C
3
and D
4
are uni-
fied symmetrically. That is, C
3
and D
4
represent a
structure-wise identical type
1
. A key feature of the
mechanism is the ability to specify the exact models
(and objects) that should be linked, e.g. the M
1
model
of MM
2
is linked with the M
2
model of MM
3
.
c
1
: C
4
-D
1
M1
M2
MM
1
MM
2
MM
3
C
4
D
1
D
3
E
1
M
1
:
MM
1
M
1
:
MM
2
M
1
:
MM
3
M
2
:
MM
2
M
2
:
MM
3
c
2
: D
3
-E
1
c
1
: C
4
-D
1
(a)
c
2
: D
3
-E
1
(a)
c
3
: C
3
-D
4
(s)
j
1
: O
4
-O
1
j
2
: O
3
-O
6
j
1
: O
4
-O
1
j
2
: O
3
-O
6
c
3
: C
3
-D
4
C
3
D
4
1 2
2 3
1 2
2 3
Unification Model:
Linking Model:
Figure 1: Conceptual overview of non-intrusive composi-
tion (class names are omitted for object identifiers).
The χ
1
and χ
3
unification points are illustrated in Fig-
ure 2.
1
More precisely, D
4
has the required structure of C
3
.
C
4
D
1
O
c
O
d
P
c
: C
3
P
d
: D
4
«unification point»
C
3
D
4
name
name
String
String
«unification point»
c
1
c
3
Figure 2: The χ
1
(asymmetric) and χ
3
(symmetric) unifica-
tion points.
For the sake of the illustration, we assume that
the C
4
class contains an operation O
c
with a param-
eter P
c
. The operation and its parameter are unified
with equivalent structure in D
1
. M
2
-mappings bind
instance names of metamodel structure, e.g. the pa-
rameter named P
c
is bound to the parameter named
P
d
. However, for structural equivalence, attribute and
parameter names are irrelevant. What is relevant is the
types of attributes or parameters (and their sequence).
Hence, the types of P
c
and P
d
need to be structural
equivalent for the two classes to form a valid unifica-
tion point.
By looking at the χ
3
unification point in the Uni-
fication Model it is clear that the types C
3
and D
4
are
structural equivalent, as both only contain a String at-
tribute, as can be seen by the rightmost unification
point. (The two classes represent an identical concept
as seen from an ontological perspective.) At runtime
this implies that an object of C
3
may be converted to
an object of D
4
and used in a type-safe invocation
of the O
d
operation. By construction, all unification
points can be represented as tree structures as seen in
the figure.
The idea of non-intrusive composition is based on
the principle of partial representation. Structural com-
monalities allow for a proxy class to represent another
class, as long as both classes have a set of common
structure (as dictated by the proxy class). Hence, the
proxy class mimics the structure and meaning of an-
other class.
3 EXAMPLE
We will illustrate the approach by exemplifying how
the behaviour of classes/objects in a GPL may be de-
fined using a state machine. Specifically, we will see
how the state of an object can be maintained by a state
machine and how methods in the class of the object
may be invoked as a consequence of a state change in
the state machine model. To the best of our knowl-
edge, no composition mechanism available can han-
dle simultaneous composition at both the metamodel
TowardsNon-intrusiveCompositionofExecutableModels
113
and model levels in the situation where the behaviour
of classes/objects are defined by a state machine.
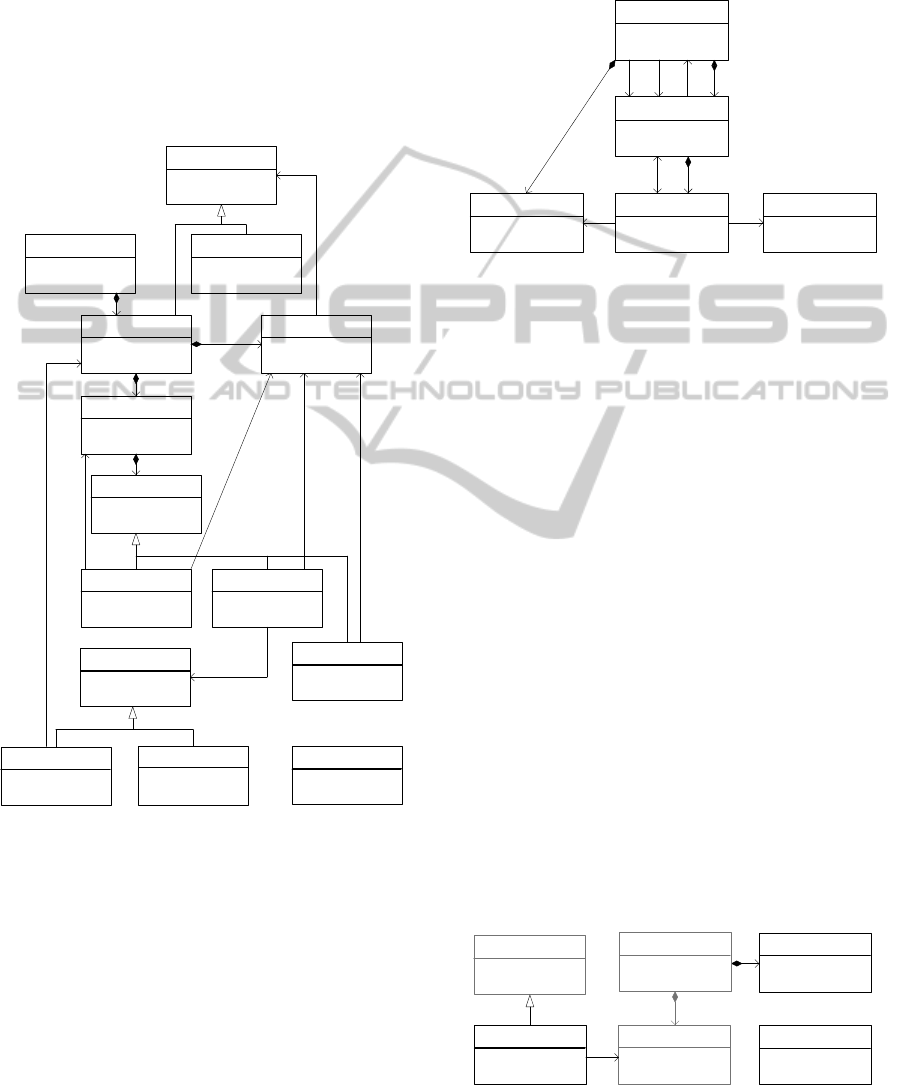
Figure 3 gives an overview of the metamodel of
the GPL. The metamodel allows creating very sim-
ple programs. We have kept the number of statement
types to a bare minimum, yet they suffice to model
interesting enough programs for the purpose of illus-
trating our framework. We will not consider other
language artefacts like concrete syntax in detail and
merely use such to visualise models.
name : EString
Class
name : EString
Attribute
Statement
exec(ClassInstance)
MethodCall Assignment
Print
text : EString
Type
Integer
Value
New
value : EInt
create() : ClassInstance
Int
Method
run(ClassInstance)
name : EString
Package
name : EString
0..* classes
0..* methods
0..* statements
0..1 attribute
0..1 reference
1..1 target
1..1 type
1..1 classDef
1..1 source
0..* attributes
1..1 methodDef
exec(ClassInstance)
ClassInstance
Figure 3: Metamodel of a simplified General-Purpose Lan-
guage (GPL).
Briefly explained, a program consists of a package
with an arbitrary number of classes. The classes may
have attributes and methods. An attribute is either
of the primitive type Integer or class-typed. Methods
have no return type or parameters. They may be de-
fined using a combination of assignments, print state-
ments and method calls. A method may either invoke
other methods defined in the same class or methods
in any other class defined within the same package
by using references (class-typed attributes). ClassIn-
stance represents a (runtime) object of a class. Notice
how Method and Statement both have operations with
a ClassInstance parameter. This allows invoking meth-
ods and executing statements for one particular object
(class instance). A ClassInstance is constructed by in-
voking the operation create() in the New class.
StateMachine
1..1 event
run(Event, EObject)
name : EString
State
step(Event, EObject)
Transition
trigger(Event, EObject)
Action
invoke(EObject)
Event
name : EString
0..1 action
1..1 target
0..* incoming
1..1 source
0..* outgoing
0..* states
1..1 initial
1..1 stateMachine
1..1 current
0..* events
Figure 4: Metamodel of a State Machine Language (SML).
The metamodel for the SML is given in Figure
4. The StateMachine class has an operation named run
that takes two arguments. The first parameter is of
type Event, the other is of the more generic type EOb-
ject. The latter allows sending an object of an EObject
subtype as an optional argument when a new event is
raised. The Transition class has an operation named trig-
ger which causes a state change if the event received
matches the event associated with any of the outgo-
ing transitions. The metamodel includes a class Action
with an operation named invoke. The invoke() operation
has to be overridden in a subtype of Action in order to
provide a custom action semantics (when using the
language by itself).
Both metamodels are defined in EMF. The oper-
ational semantics of the classes has been added by
building on the code generated using the built-in code
generator of the EMF framework. Thus, the mod-
els/programs of the two languages may be run stan-
dalone. In order to model the behaviour of objects we
need to extend the GPL metamodel with concepts for
sending signals/events. In particular, we want to add
a new kind of statement that allows sending signals
from within methods. Figure 5 shows how this can be
achieved.
name : EString
Attribute
Statement
exec(ClassInstance)
SendSignal
Behaviour
1..1 attribute
0..1 behaviour
eventName : EString
exec(BehaviourEvent,
ClassInstance)
BehaviourEvent
name : EString
name : EString
Class
exec(ClassInstance)
0..* attributes
Figure 5: Additional classes for modelling of signal-
s/events.
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
114
Behaviour is intended to be a proxy class for the
StateMachine class in the SML metamodel, whereas
BehaviourEvent is intended to represent the Event class.
Notice that using send signal statements and creating
Behaviour objects are optional, which means that ex-
isting models and tools are not impacted significantly,
e.g. existing models of the GPL metamodel are still
valid. That is, classes in the extended GPL language
may have behaviour externally defined if required.
The only required update to e.g. a model editor is to
support creating instances of a proxy class, if such
is added to a metamodel to facilitate composition
(existing classes in a metamodel can also be used as
proxy classes).
package Exam p l e {
class C 1 {
attribute c 2 : C 2
ma i n ( ) {
c2 = new C2 ( );
c2 . pr i n t ( ) ;
se n d S i gn a l ( " O n " , c 2 );
c2 . pr i n t ( ) ;
se n d S i gn a l ( " Off " , c 2 );
c2 . pr i n t ( ) ;
se n d S i gn a l ( " O n " , c 2 );
c2 . pr i n t ( ) ;
}
}
class C 2 [ beh a v i o u r = true] {
attribute a : I nt
se t A 0 () { a = 0 ; }
se t A 1 () { a = 1 ; }
pr i n t () { _print( " Va l u e : " + a ); }
}
}
Figure 6: An example GPL program.
The next step is to compose the metamodels and
models in the two languages. The behaviour of the
objects of a class may be modelled by a state ma-
chine. An object’s state thus depends on the current
state of the state machine and what signals (events)
that have been received. The source of such signals
is irrelevant in this case, but we assume there is some
kind of sensor. An example program in the extended
GPL is given in Figure 6. A send signal statement
takes two arguments; an event name and the object
on which to send the signal. The signalling concept
could have been defined to wait for an external event
from e.g. a sensor. A behaviour is associated to the
C2 class by setting a flag named behaviour (resulting
in the creation of a Behaviour object). To keep things
manageable, what we set out to do can be summarised
by these main points:
• Program execution starts by invocation of main
• An ”On” signal/event is sent to an object of the C2
class
• The event is forwarded to the specified SML
model (utilising the framework)
• The current state of the state machine changes
from Idle to On
• The state change causes invocation of setA1() in
C2 (utilising the framework)
• The value of a is printed to screen
The simple scenario above suffices to underline
the mechanics of our framework.
4 THE FRAMEWORK
We have implemented a prototypical framework that
realises the concepts of this paper. The framework
builds on top of EMF. This means that it works
with all EMF-compatible metamodels and their oper-
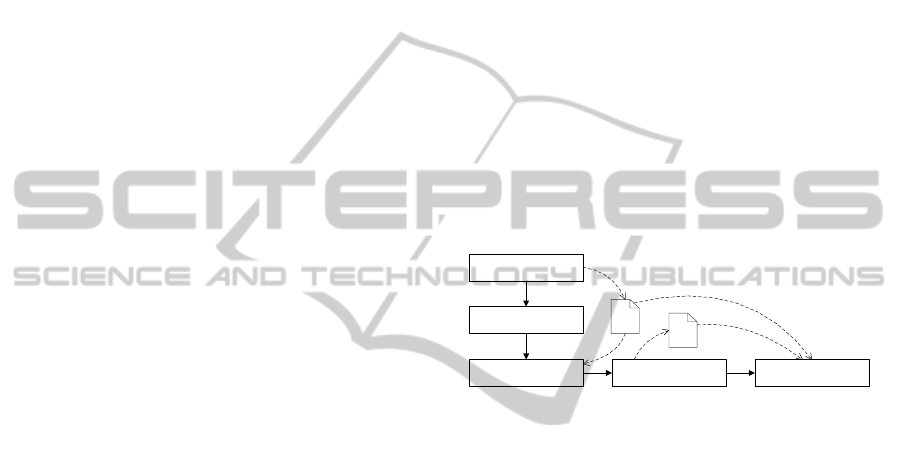
ational semantics (model code). Non-intrusive com-
position using the framework corresponds to the five
phases illustrated in Figure 7. We will discuss each
phase in detail using the example.
Definition of
Code Generators
UM
Specification of
Unification Model
Execution of ModelsGode Generation
Specification of
Linking Model
LM
1
2
3 4 5
Figure 7: The five phases of non-intrusive model composi-
tion.
4.1 Specification of Unification Model
In order to specify the behaviour for the Class con-
cept using a state machine model we have to create
a set of unification points that relate the classes of
the two metamodels. The Behaviour class in the GPL
metamodel is going to represent the StateMachine class
in the SML metamodel, whereas Action will be repre-
senting Method. Furthermore, the BehaviourEvent class
of the GPL metamodel will be unified with the Event
class of the SML metamodel. Four unification points
are required to achieve this.
Behaviour is intended to be a proxy class for
StateMachine. Hence, all the structure of Behaviour
needs to be matched by equivalent structure in
StateMachine, since code generated for the Class con-
cept will implicitly refer to such structure. Behaviour
contains an operation with two parameters; one of
type BehaviourEvent and one of type ClassInstance.
StateMachine contains an operation as well with pa-
rameters of type Event and EObject. The only way that
Behaviour and StateMachine can be unified is if the Be-
haviourEvent class can be unified with the Event class
and the ClassInstance class can be unified with the
TowardsNon-intrusiveCompositionofExecutableModels
115

Behaviour StateMachine
exec
run
BehaviourEvent
ClassInstance
Event
EObject
«unification point»
Method
Action
run
invoke
ClassInstance
EObject
«unification point»
BehaviourEvent
Event
name
name
String
String
«unification point»
ClassInstance
EObject
«unification point»
Figure 8: The four unification points between classes in the GPL and SML metamodels.
EMF built-in EObject interface. BehaviourEvent con-
sists of an attribute with a String type. Event has a
String attribute as well. Hence, BehaviourEvent and
Event can be unified by a symmetric unification point
since BehaviourEvent and Event are structurally equiva-
lent. Moreover, ClassInstance can be unified with EOb-
ject. ClassInstance is not a subtype of EObject. How-
ever, the Java counterpart of ClassInstance, ClassIn-
stanceImpl, will be generated as a subtype of the EOb-
jectImpl Java class by the built-in EMF code generator.
EObjectImpl implements the EObject interface. As a re-
sult, Behaviour and StateMachine may indeed be unified
by an asymmetric unification point. The purpose of
the EObject parameter in the run() operation is to al-
low sending an optional argument. In the example, a
ClassInstance object of the C2 class, whose behaviour
is modelled by the state machine model, is passed as
an argument. It is later used to know what object on
which to invoke the setA1() operation. Action contains
an operation named invoke with an EObject parameter,
whereas Method contains an operation run() with a pa-
rameter of type ClassInstance. We have already seen
that ClassInstance and EObject are type-compatible,
thus, Action and Method can be unified. Notice that
additional structure in StateMachine with respect to Be-
haviour, and additional structure in Method with respect
to Action, would have been ignored as it is not required
for the partial representation whose requirements are
specified by the proxy classes (Behaviour and Action).
Figure 8 gives the complete Unification Model. The
nodes representing parameters are replaced with types
instead of parameter names to improve the readability
of the figure.
4.2 Definition of Code Generators
The framework supports the automatic generation of
reflective code for linking the operational semantics
of two metamodels non-intrusively. By also using
subtyping and overriding of methods we ensure that
the existing operational semantics does not need to be
changed.
In the example, the added Behaviour class in the
GPL metamodel is intended to represent the StateMa-
chine class in the SML metamodel. This means that
the operational semantics of the Class concept of the
GPL metamodel needs to be revised to reflect this.
This is achieved by creating a code generator which
outputs a subtype of ClassImpl. ClassImpl is the Java
class generated by EMF which defines the Class con-
cept’s operational semantics. The subtype will con-
tain the necessary code for interacting with the op-
erational semantics of the StateMachine class. The
code will be defined in an operation named signal.
The signal() operation has a parameter typed with Be-
haviourEvent and one typed with ClassInstance. It will
be invoked from the operational semantics of the
SendSignal class, i.e. an overridden version of the
exec() operation as defined in Statement. See Figure
9.
public class C l a s sI mp lC us to m extends C l a s s I mp l
{
public void signal ( B e h a vi ou rE ve nt be ,
Cl a s s In st a nc e ci )
{
.. .
}
}
Figure 9: The subtype of ClassImpl.
Similarly, Action is intended to represent Method.
Thus, a code generator that generates a subtype of the
TransitionImpl class needs to be constructed. The code
generators may be simple Java classes or utilise emit-
ter templates. Code generators are used as tools for
simplifying specification of glue code. It is possible
to define the subtypes manually and utilise the frame-
work directly, though this requires writing a lot more
code.
4.3 Code Generation
The code generators are run to generate code required
for linking the operational semantics of two or more
metamodels. The new code is added to the existing
code defining a metamodel’s operational semantics
by using inheritance. A build script also ensures that
the EMF factories are updated to create objects of the
generated subtypes. The subtypes are still compatible
with EMF. The generated subtypes contain manually
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
116

defined domain-specific code and automatically pro-
duced reflective code. There are two types of reflec-
tive code that may be generated: code for accessing
attributes and/or code for invoking operations. The
reflective code may be tailored by using a set of sim-
ple options/flags, e.g. it may be required to clone a set
of objects at runtime or send objects as operation ar-
guments that will later be returned in a callback fash-
ion. The framework will take care of forwarding in-
vocations between two metamodels’ operational se-
mantics and convert parameter types at runtime (cor-
responding to symmetric unification points). That is,
it eliminates the need for a common type (used in the
definitions of both metamodels) when sending non-
primitive values.
4.4 Specification of Linking Model
The Linking Model allows pin-pointing what (proxy)
object of a given model that should be linked to a (tar-
get) object in another model. The Linking Model is
built by referring to objects of different models and
building pairs of two objects. In principle, there is no
restriction to what objects that may be linked. How-
ever, only pairs that reflect unification points in the
Unification Model are valid.
: Class
"C2"
: Package
"Example"
: Method
"setA0"
GPL Model
SML Model
«mapping #1»
: State
Idle
: State
On
: State
Off
: State
Machine
: Action
Proxy #1
: Action
Proxy #2
"On"
"Off"
"On"
: Behaviour
Proxy #1
: Method
"setA1"
«mapping #2» «mapping #3»
: Class
"C1"
Figure 10: Linking of the objects in the GPL and SML mod-
els (graphical representation of the Linking Model).
Figure 10 gives a state machine model whose def-
inition captures the intended class/object behaviour,
and the objects of the GPL program previously intro-
duced. Notice the event names that trigger the tran-
sitions, e.g. ”On” for the transition between the Idle
and On states. What we want to achieve is that each
signal/event from the GPL program is forwarded to
the state machine model. Hence, we need to create
an M
1
-mapping between the Behaviour object and the
object of the StateMachine class. An important point
is that each instance of the C2 class needs a unique
set of runtime objects representing the state machine
model, since their behaviour is independent. This is
achieved by setting a flag when utilising the generate-
OperationCall() method of the framework
2
. However,
it is still possible to specify the Linking Model with
only one state machine model (at M
1
). The state ma-
chine model contains two Action objects. These ob-
jects need to be linked to the Method objects represent-
ing the setA0() and setA1() methods. By creating these
mappings, we complete the definition of the Linking
Model.
4.5 Execution of Models
By linking model objects we are able to ensure that
the corresponding runtime objects (Java objects) are
linked as well. This is essential for the operational
semantics of different metamodels to work in con-
cert. The framework forwards operation invocations
and deals with conversion of runtime objects used as
arguments. It utilises the Unification Model to find
the correct pairing of classes and creates objects us-
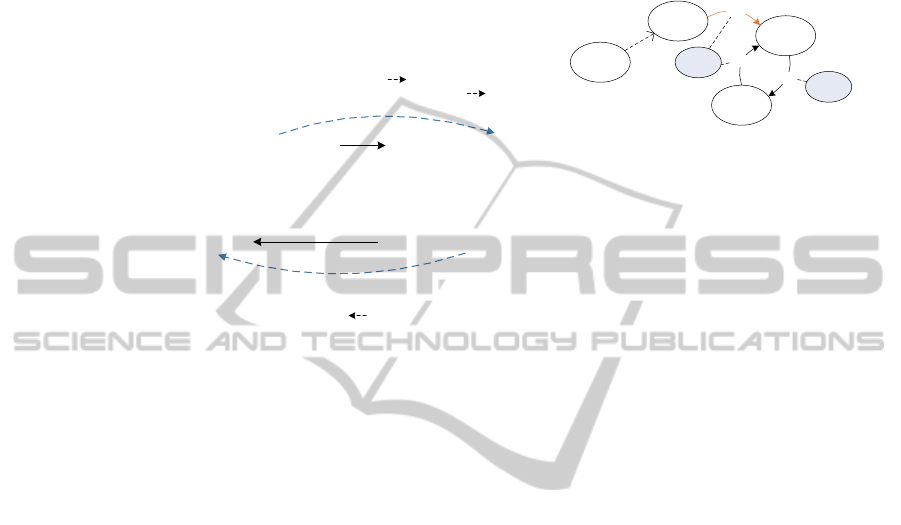
ing reflective code. Figure 11 details how the op-
erational semantics of the two languages work to-
gether. It also summarises how non-intrusive compo-
sition works. To avoid confusion we use the term ob-
ject for an M
1
-object, e.g. the object C1 resulting from
instantiating the Class concept in the GPL metamodel.
For a runtime object of C1 we use the term instance.
Furthermore, invocations of operations (language se-
mantics) are in a regular font, whereas invocations of
methods (in GPL programs) are in an italic font.
The execution starts by invoking the exec() opera-
tion on the Class object that represents C1 in the GPL
model (1). A instance of C1 (represented by a ClassIn-
stance object) is passed as argument to the operation
(manually chosen). The semantics of the exec() oper-
ation invokes the main() method as defined in the C1
class (2). The print() method of the C2 class is then
invoked after instantiating this class (3). The next
statement of the main() method is a send signal state-
ment (4). The semantics of this statement creates a
BehaviourEvent instance and invokes the signal() opera-
tion on the C2 object (5). The BehaviourEvent and C2
instances are passed as arguments to the operation.
signal() invokes the exec() operation on the associated
Behaviour object (6). More precisely, the invocation
2
The method generates reflective code for invocation of
an operation.
TowardsNon-intrusiveCompositionofExecutableModels
117
1. C1.exec( CI[C1] )
«Unification/Linking lookup»
exec() run()
BehaviourEvent["On"] Event["On"]
2. CI[C1].main()
3. CI[C2].print()
4. C1.main.sendSignal
1
.exec( "On", CI[C2] );
6. C1.behaviour.exec( BE["On"], CI[C2] );
7. StateMachine.run( E["On"], CI[C2] );
8. State.step( E["On"], CI[C2] );
9. Transition.trigger( E["On"], CI[C2] );
10. Action.invoke( CI[C2] );
12. CI[C2] .setA1()
13. CI[C2] .print()
«Unification/Linking lookup»
run() invoke()
class C1
{
attribute c2 : C2;
main()
{
c2 = new C2();
c2.print();
sendSignal( c2, "On" );
c2.print();
...
}
}
: State
Idle
: State
On
: State
Off
: State
Machine
: Action
Proxy #1
: Action
Proxy #2
"On"
"Off"
"On"
3.
4.
7.
8.
9.
10.
class C2
{
attribute a : Int;
setA0() { a = 0; }
setA1() { a = 1; }
print() { … }
}
11. 12.
3. 13.
13.
11. C2.setA1.run( CI[C2] )
2.
5. C2.signal( "On", CI[C2] );
Figure 11: Illustration of how a object’s behaviour is executed at runtime. Acronyms used: ClassInstance (CI), Be-
haviourEvent (BE), Event (E).
of exec() does not result in the actual operation in the
Behaviour class to be invoked. Instead the operation
invocation is sent to the framework where it is re-
solved and forwarded as an invocation of the run() op-
eration on the StateMachine object in the SML model
(7). This includes converting the BehaviourEvent in-
stance passed as argument to an Event object. Notice
how the ClassInstance object, representing the instance
of C2, is sent as the second argument. The Event object
causes the transition between the Idle and On state to
be triggered (9). This results in the invoke() operation
on the Action object to be invoked (10), or more pre-
cisely, the invocation of the operation is resolved by
the framework, which forwards the invocation to the
run() operation on the designated Method object (11).
The argument to run() is the ClassInstance object that
was initally passed via the call to the run() operation
on the StateMachine object. The setA1() method is then
invoked on the ClassInstance object, i.e. the instance
of the C2 class. Finally, the print() method is invoked
and the value 1 is printed to screen. Notice how the
Unification Model and Linking Model are queried for
information at runtime.
5 EVALUATION
The key problem arising when composing metamod-
els is how existing tools and models are rendered
invalid. The approach of this paper addresses this.
Specifically, we wanted to show that it is possible
to combine two languages’ operational semantics by
defining mappings between the languages’ concepts
and objects in the models of these languages in a sep-
arate manner. By using reflective code we are able to
forward operation invocations and convert parameter
types. The key advantage with our approach is that
the metamodels’ structures are not woven together.
Hence, there are minimal impacts on modelling arte-
facts that are defined relative to the metamodels. Even
though the approach is flexible, it may be required
to design a metamodel in a way that allows it to be
composed with another metamodel. As an example,
it may be required to add a proxy class to an exist-
ing metamodel in order to create the structural bridge
between metamodels. That said, an object of such a
proxy class would be optional and therefore not im-
pact existing tools or models significantly. The proxy
class is only instantiated when the metamodel is in-
tended to be composed with another metamodel. An
interesting observation is that the object of a class
changes role depending on whether the class is part of
a unification point or not. Consider the Method class
of the GPL metamodel in Figure 3. Let us assume
that we have a metamodel for modelling of methods
- an expression language. The Method class may thus
represent a proxy for the top node class of such an
expression language. In such case, an object of the
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
118

Method class does now have a different purpose. It is
merely used to establish an M
1
-mapping in the Link-
ing Model. This means that its contained statement
objects would have been ignored. A class may have
several methods. Each method object would thus be
linked to a distinct expression language model.
Evolution of metamodels requires evolution of the
Unification Model and Linking Model. However, the
complexity concerned with changing these models
are significantly lower than addressing co-evolution
of models and other modelling artefacts.
The mechanism described in this paper focuses on
how the operational semantics of different languages
can work together. The M
1
- and M
2
-mappings may
also be used by tools, e.g. by editors, to present inte-
grated views of different languages.
Reflective code is known to be slower than non-
reflective code. The mechanism discussed in this pa-
per uses reflective code to decouple different meta-
models’ operational semantics. However, the reflec-
tive code is only active when the operational seman-
tics of the metamodels interact. For the example in
this paper, this adds up to two operation invocations
(with instantiation of arguments) per new signal/event
received. That is, most of the operational seman-
tics being executed is based entirely on non-reflective
code.
In the example, we saw how the Behaviour class
is a placeholder for the StateMachine class. Conse-
quently, it appears that an object of Class contains a
StateMachine object via the behaviour containment ref-
erence. This is an important point, because the con-
tainment reference dictates the type of composition
between the GPL and SML metamodels. That is, the
association represents a composition relation.
We have not discussed tool support for creating
the Unification Model and Linking Model. In an in-
dustrial context, a reflective graphical editor (created
using e.g. GMF) may greatly simplify the process
of specifying these models by allowing to draw the
M
2
- and M
1
-mappings directly between metamodel
and model structure. The graphical models can then
be used to generate the Unification Model and Link-
ing Model automatically. A graphical editor may also
provide a simple way of specifying the manual code
required to realise unification of two classes’ opera-
tional semantics. An editor may also implement func-
tionality for addressing co-evolution of the models.
6 RELATED WORK
We have not been able to find much related work con-
cerned directly with the implicit nature of our com-
position approach. That is, the literature mainly cov-
ers explicit model composition and adaptation strate-
gies using migration techniques and transformations.
Most of the available related work addresses compo-
sition of structure and does not directly consider com-
position of operational semantics.
Methods for automatic co-evolution of metamod-
els and models are necessary to further model-driven
engineering. The work of (Herrmannsdoerfer et al.,
2009) describes how models may be migrated as
a consequence of metamodel adaptations. This is
achieved using coupled transactions. A coupled trans-
action is constructed using a set of primitives. There
are two types of primitives: primitives for query-
ing a metamodel or model, and primitives for mod-
ifying such artefacts. A coupled transaction pre-
serves both metamodel consistency and metamodel-
model conformance. The work has been validated by
implementing a language on top of EMF. With re-
spect to the work of our paper, the method for cou-
pled co-evolution works on metamodels and mod-
els by changing these explicitly. Hence, other mod-
elling artefacts are impacted by the changes, i.e. co-
evolution of tools are not addressed.
Another similar approach for metamodel-model
co-evolution is discussed in (Wachsmuth, 2007). The
work is based on the application of transformations
both on the metamodel and model level. Co-evolution
of metamodels is described using a set of relations
between metamodels, in which are used to ensure se-
mantics and instance preservation for the transforma-
tions.
The authors of (Cicchetti et al., 2008a)(Cicchetti
et al., 2008b) discuss how model migration steps can
be generated directly from a difference model that en-
corporates information on the evolutionary changes of
a metamodel. The difference model is used as basis
for a higher-order transformation in which produces a
transformation that is capable of re-establishing con-
formance between models and their metamodel. The
work addresses concerns related to parallel dependent
metamodel manipulations which may cause conflicts
as they work on the same metamodel elements. These
can be resolved in an iterative process, which yields a
set of parallel independent modifications.
The work of (Herrmannsdoerfer et al., 2011)
presents a catalogue of (coupled) operators for
achieving automated migration of models as a con-
sequence of evolving metamodels. The opera-
tors are classified according to several dimensions:
language preservation, model preservation and bi-
directionality. The work discussed in our paper does
not utilise coupled operators. However, the M
1
-
mappings carefully reflect the M
2
-mappings. Specifi-
TowardsNon-intrusiveCompositionofExecutableModels
119

cally, only objects whose classes are related using M
2
-
mappings may safely be related using M
1
-mappings.
Another approach utilising higher-order transfor-
mations is discussed in (Hoisl et al., 2014). The ap-
proach is based on defining bi-directional transforma-
tions between modelling artefacts, and uses higher-
order transformations on the specifications of the bi-
directional transformations. This ensures that also the
transformations between the modelling artefacts co-
evolve correctly.
An approach for defining reusable metamodel be-
haviour is discussed in (de Lara and Guerra, 2011).
The approach is based on generic concepts which al-
low adding the same behaviour to unrelated meta-
models. This is achieved by using pattern matching
according to the parameters and requirements of the
concept. A similar approach, in the form of model
types, is discussed in (Steel and Jzquel, 2007).
7 CONCLUSION AND FUTURE
WORK
Composition mechanisms that work on both the meta-
model and model level are important to ensure consis-
tency in the metamodelling ecosystem. In this paper,
we have illustrated how metamodels and models can
be composed in a practically non-intrusive manner in
order for their operational semantics to be linked to-
gether. Non-intrusive composition is achieved by util-
ising a set of mappings, both at the metamodel level
and at the model level. By building on the principle
of partial representation we are able to specify proxy
classes. A proxy class is a placeholder for another
class. Its attributes and operations represent structural
requirements that need to be supported by the class for
which the proxy class is a placeholder. Non-intrusive
composition allows for metamodels and models to
be composed without rendering models, editors and
other modelling artefacts invalid.
An interesting next step is to see whether the map-
pings may be realised in a different form and incorpo-
rated more closely into a language’s definition, and to
study whether non-intrusive composition brings value
also for non-executable models. Future work also
includes solidification of the framework to industry
standard, with the inclusion of a graphical editor.
REFERENCES
Cicchetti, A., D. Ruscio, D., Eramo, R., and Pierantonio,
A. (2008a). Automating co-evolution in model-driven
engineering. In Enterprise Distributed Object Com-
puting Conference (2008).
Cicchetti, A., D. Ruscio, D., Eramo, R., and Pierantonio,
A. (2008b). Meta-model differences for supporting
model co-evolution. In Proceedings of the 2nd Work-
shop on Model-Driven Software Evolution.
de Lara, J. and Guerra, E. (2011). From types to type re-
quirements: Genericity for model-driven engineering.
In Software and Systems Modeling. Springer (2011).
Demuth, A., Lopez-Herrejon, R., and Egyed, A. (2013).
Supporting the co-evolution of metamodels and con-
straints through incremental constraint management.
In Model Driven Engineering Languages and Sys-
tems, LNCS vol. 8107, pp.287-303. Springer (2013).
Di Ruscio, D., Iovino, L., and Pierantonio, A. (2012).
Evolutionary togetherness: How to manage coupled
evolution in metamodeling ecosystems. In Graph
Transformations, LNCS vol. 7562, pp.20-37. Springer
(2012).
EMF (2014). Eclipse modeling framework (emf).
Fleurey, F., Baudry, B., France, R., and Ghosh, S. (2008).
A generic approach for automatic model composition.
In Models in Software Engineering, LNCS vol. 5002,
pp.7-15. Springer (2008).
Garca, J., Diaz, O., and Azanza, M. (2013). Model trans-
formation co-evolution: A semi-automatic approach.
In Software Language Engineering, LNCS vol. 7745,
pp.144-163. Springer (2013).
Groher, I. and Voelter, M. (2007). Xweave - models and
aspects in concert. In 10th international workshop on
Aspect-Oriented Modeling (AOM ’07) pp.35-40. ACM
Press (2007).
Herrmannsdoerfer, M., Benz, S., and Juergens, E. (2009).
Cope: Coupled evolution of metamodels and models
for the eclipse modeling framework. In ECOOP 2009
- Object-Oriented Programming, LNCS vol. 5653,
pp.52-76. Springer (2009).
Herrmannsdoerfer, M., D. Vermolen, S., and Wachsmuth,
G. (2011). An extensive catalog of operators for the
coupled evolution of metamodels and models. In Soft-
ware Language Engineering, LNCS vol. 6563, pp.163-
182. Springer (2011).
Hoisl, B., Hu, Z., and Hidaka, S. (2014). Towards co-
evolution in model-driven development via bidirec-
tional higher-order transformation. In Proceedings
of the 2nd International Conference on Model-Driven
Engineering and Software Development. Springer
(2014) [to appear].
Kolovos, D. S., Paige, R. F., and Polack, F. A. (2006). Merg-
ing models with the epsilon merging language (eml).
In Model Driven Engineering Languages and Sys-
tems, LNCS vol. 4199, pp.215-229. Springer (2006).
Morin, B., Perrouin, G., Lahire, P., Barais, O., Van-
wormhoudt, G., and Jzquel, J.-M. (2009). Weav-
ing variability into domain metamodels. In Model
Driven Engineering Languages and Systems, LNCS
vol. 5795, pp.690-705. Springer (2009).
Muller, P.-A., Fleurey, F., and Jzquel, J.-M. (2005). Weav-
ing executability into object-oriented meta-languages.
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
120

In Model Driven Engineering Languages and Sys-
tems, LNCS vol. 3173, pp.264-278. Springer (2005).
OMG (2014). Meta object facility (mof) core specification.
Steel, J. and Jzquel, J.-M. (2007). On model typing. In
Software and Systems Modeling, vol. 6, no. 4, pp.401-
413. Springer (2007).
Wachsmuth, G. (2007). Metamodel adaptation and model
co-adaptation. In ECOOP 2007 - Object-Oriented
Programming, LNCS vol. 4609, pp.600-624. Springer
(2007).
TowardsNon-intrusiveCompositionofExecutableModels
121
