
Towards a Resource-based Model of Strategy to Help Designing
Opponent AI in RTS Games
Juliette Lemaitre
1,2
, Domitile Lourdeaux
1
and Caroline Chopinaud
2
1
Heudiasyc - UMR CNRS 7253, Universit
´
e de Technologie de Compi
`
egne, 60200 Compi
`
egne, France
2
MASA Group, Paris, France
Keywords:
Strategy, Behavior Modeling, Game Design, Player Experience, Adaptation.
Abstract:
The artificial intelligence used for opponent non-player characters in commercial real-time strategy games is
often criticized by players. It is used to discover the game but soon becomes too easy and too predictable.
Yet, a lot of research has been done on the subject, and successful complex behaviors have been created, but
the systems used are too complicated to be used by the video games industry, as they would need time for the
game designer to learn how they function, which ultimately proves prohibitive. Moreover these systems often
lack control for the game designer to be adapted to the desired behavior. To address the issue, we propose
an accessible strategy model that can adapt itself to the player and can be easily created and modified by the
game designer.
1 INTRODUCTION
The Artificial Intelligence (AI) used for non-player
characters (NPC) in commercial video games does
not take full advantage of the academic research that
exists on the subject. Some games have used planning
systems (Orkin, 2004) or even learning algorithms,
but they remains exceptions. The main reason lies in
a clear difference in goals and constraints that causes
the solutions developed by the research community to
be inadequate for the industry.
Indeed, during game development, the design of
an AI for the NPCs is commonly a low priority task.
Other aspects, like 3D graphics and animation, ac-
count for most of the time and money available for
game design. The lack of time also leads to the cre-
ation of AI solutions from scratch, specific to a single
game, producing underexploited and non-reusable AI.
Hence, introducing a new AI system into the design
process requires proposing a reusable and easy to un-
derstand and use solution.
Some video games, for which AI is at the heart
of the scenario, need to provide interesting and com-
plex AI. This is the case with real-time strategy (RTS)
games: their environments present multiple chal-
lenges, widely studied by the research community.
But even if the required complex behaviors consti-
tute a necessarily important part of the game design,
simple but ill-adapted solutions like finite state ma-
chines (FSM) and behavior trees (BT) are used to
design NPCs’ behaviors rather than more advanced
technologies like genetic algorithms or planification.
Thus, simple and accessible solutions to design AI are
preferred, but this simplicity is not the only require-
ment for an AI system.
Indeed, BT and FSM not only offer easier compre-
hension but also control and reliability. Most of the
solutions provided by the research community lack
one of these criteria: sometimes they do not provide
a solution, making the NPC inanimate; when they do
provide a solution, it is often difficult, even impos-
sible, to customize it to obtain the desired behavior.
Indeed, while in research most of the studies aim to
improve the results of the AI (faster or better behav-
iors than the opponent), the goal of a video game is
also and for the most part to entertain the players. If
the two goals are not completely incompatible, they
are rarely satisfied by the same solutions. In a game
an NPC can have several roles: opponent, partner, as-
sistant, populating the environment... Each one can
bring fun to the game in different ways, which is the
difficult part because there is no consensus on the ex-
planation of fun; but game research and the industry
have tried to understand it and several definitions have
appeared in the last few years.
In short, AI in games has to be simple to design,
accessible for the game designer, reusable and suit-
able for designing attractive scenarios. These criteria
210
Lemaitre J., Lourdeaux D. and Chopinaud C..
Towards a Resource-based Model of Strategy to Help Designing Opponent AI in RTS Games.
DOI: 10.5220/0005254402100215
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 210-215
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

mean that the design process for behaviors of NPCs
in a game have to be easy for designers to test, con-
trol and customize to achieve the desired behaviors.
In order to address this issue, we propose a solution
to conceive and efficiently test collective behaviors,
commonly called strategy in RTS games. In this pa-
per we present a model to design strategies accessible
to the game designers. The proposed model aims to be
used to design behaviors that are adaptable, reusable
and reliable. To address the specific issue of entertain-
ment, a semantic layer is added to the behavior model
to clarify the impact of the behavior on the game ex-
perience. After presenting the related work and its
limits, we will present our behavior model and then
discuss the perspectives we foresee for this work.
2 RELATED WORK
2.1 RTS Research
(Ontanon et al., 2013) has gathered most of the work
related to RTS games AI, separating the work from
Starcraft AI competitions in the CIG and AAAI con-
ferences, and the work done for research purposes.
Both round-robin and single-elimination tourna-
ments proposed during the CIG and AAAI confer-
ences focus on the performance of the competitors.
The AI system of each participant competes against
the others and the only parameter that will deter-
mine the winner is the percentage of winning games.
Moreover, the architectures created for the events are
adapted specifically for Starcraft, broken down into
several parallel and hierarchical modules (Ontanon
et al., 2013). It shows the importance of decomposi-
tion of the decision task, but the specialization of the
modules makes it difficult to reuse them in another
environment. With our model, we aim to provide a
strategy structure that can be used in diverse environ-
ments.
The RTS environment has become widely used as
a testbed in game research because of the multiple
challenges that emerge from it (Buro, 2003). Multiple
IA techniques have been tested for their effectiveness
but often lack usability required for commercial use.
For example (Dereszynski et al., 2011) uses sets of
game logs from Starcraft to produce hidden Markov
models. The resulting behaviors depend entirely on
probability which makes it unpredictable and limits
the game designers control. Case-based planning in
(Ontanon et al., 2007), studied more extensively in
(Palma et al., 2011), also fails to provide the neces-
sary control over obtained behaviors and requires ex-
perts to create example libraries. Furthermore, both
use a learning process which does not integrate well
in the creation process of a video game. Indeed, a
learning process can only be performed properly on
a completed game. If an incomplete version is used,
it is faster to restart the learning process from scratch
than to adapt the previous result to the final version.
Automated planning has also been used in game re-
search, (Churchill and Buro, 2011) uses it to optimize
build order in Starcraft. The computing time and the
vast search spaces in RTS games prevent it from be-
ing used for the entire decision mechanism. We would
like to provide a reusable solution where the game de-
signer has control over the AI produced and can un-
derstand the resulting behaviors.
2.2 Defining Fun
A lot of studies have tried to explain the meaning of
fun and how it can be triggered. The most studied as-
pect of fun is the level of difficulty, which needs to
be challenging, neither too easy, nor too hard, to stay
between anxiety and boredom as defined in the the-
ory of flow (Nakamura and Csikszentmihalyi, 2002).
Most of the studies resulted in classifications of kinds
of fun, (Malone, 1980; Lazzaro, 2004). (Read et al.,
2002) defined 3 dimensions of fun: endurability, en-
gagement and expectations. Other studies focus more
on the player, (Bartle, 1996; Bateman and Boon,
2006). When comparing these classifications, we can
find some similarities but no consensus has been made
on which one is the most accurate and their use in the
creation of behaviors is still unexploited even though
fun is at the heart of game design. In our solution, we
want to allow the designer to create a behavior that
reacts and adapts to the player, so that it provides a
fun and interesting experience.
3 PROPOSITION
The goal of our work is to provide an accessible strat-
egy model in order to simplify the design of com-
plex behaviors. A strategy is defined as the decision-
making process of the allocation of available re-
sources, such as agents or objects, to sub-tasks in the
pursuit of an overall goal. Our model aims to facili-
tate the designing of reusable, reliable and easily ex-
tendible collective behaviors through the description
of strategies. It will therefore fit into the creation pro-
cess of a new video game, during which several mod-
ifications of the game mechanisms are applied and re-
quire the adaptation of every element, including the
AI of the NPC. We want the model to be apprehensi-
ble, to the extent that the reason for the occurrence
TowardsaResource-basedModelofStrategytoHelpDesigningOpponentAIinRTSGames
211
of an unwanted behavior can be spotted easily and
solved in order to allow designers to manage the co-
herence, credibility and fun of the designed behaviors.
3.1 The Strategy Model
Our model aims to facilitate the creation of collec-
tive behaviors in RTS, and more generally the behav-
iors of several agents which need to be coordinated.
To construct the overall behavior, that we call strat-
egy, we use a hierarchical structure to allow decom-
position into simpler sub-behaviors and thus handle
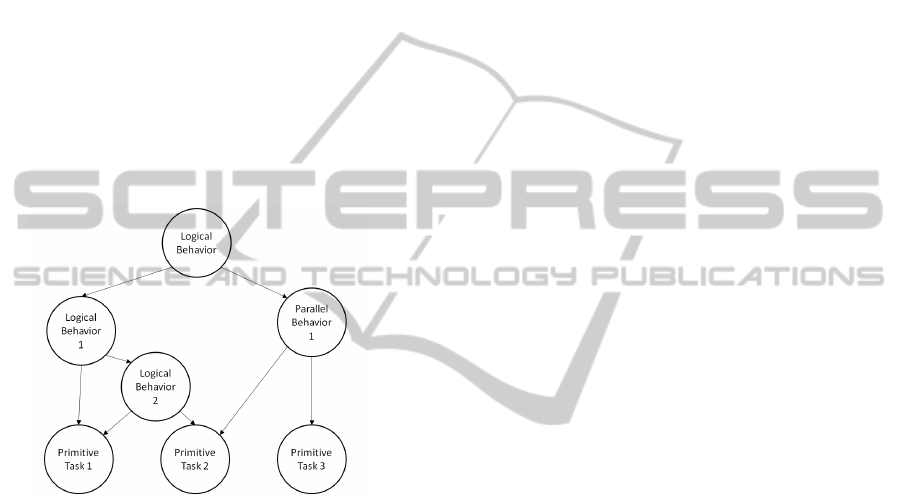
scalability. A behavior is then composed of a set of
sub-behaviors and the strategy can therefore be rep-
resented by a Directed Acyclic Graph (DAG) with a
unique root node as shown in figure 1. All vertices
without outgoing edges are primitive tasks, meaning
that it can be directly applied in the virtual world.
Figure 1: Strategy.
A behavior is defined by a set of behaviors or
primitive tasks, its type, and the resources it needs.
The type of a behavior can either be logical or paral-
lel. The parallel type allows the expression of collec-
tive behavior while the logical type allows the AI to
choose a behavior according to the state of the game.
To avoid complexity, it has been decided to clearly
separate them by defining a behavior as either logical
or parallel rather than permitting a mixture of both
in a single behavior. The parallel type requires addi-
tional information about the distribution of resources
between its different sub-behaviors. The logical one
needs information about the decision-making process
to choose only one of its different sub-behaviors at
each evaluation. They are detailed in 3.1.2 and 3.1.3.
3.1.1 Primitive Tasks
Primitive tasks are the smallest part of the decompo-
sition of a behavior. They cannot be decomposed, but
each one is linked to a piece of code that allows it
to run in the virtual environment. They are defined
by a set of resources that are required for it to work.
Each resource is defined by a tuple <R, Min, Max>
where R is the type of resource defined with the re-
source model presented in 3.2, Min is the minimum
amount required, and Max is the maximum amount
possible and can be set to -1 if there is no maximum.
This offers more flexibility than a fixed number and is
more suited to evolving numbers of resources which
is the case in RTS games. For example, to represent
the task of construction, a primitive task can be cre-
ated with the following resources:
<<worker, 1, -1>, <ground, 1, 1>>
In this way, several workers can work on a con-
struction that requires a unit of ground. To handle fail-
ure, a status of ending, success or failure, is returned
to the parent behavior so it can adapt accordingly.
3.1.2 Logical Behaviors
A logical behavior represents the logic of selection of
a sub-behavior from several. Its execution consists of
selecting the sub-behavior to be executed, according
to the previous one executed and the current state of
the virtual world. It is represented by a tuple <B, M,
SB, CB> where:
B is the set of sub-behaviors
M is the set of triggers <OB, T, DB>
SB is the starting sub-behavior
CB is the current sub-behavior
A trigger is composed of a transition T that triggers
the selection of the sub-behavior DB if OB is the cur-
rent sub-behavior. The new sub-behavior DB can be
one of the predefined sub-behaviors Success or Fail-
ure, in which case the transition causes the end of the
logical behavior and a signal corresponding to the se-
lected status is sent to the parent behavior.
The transitions can be internal or external sig-
nals, or information requests: internal signals are
the success or failure feedback from the current sub-
behavior, external signals come from modules dedi-
cated to the game, and information requests are repre-
sented by predicates. For example, an external signal
can come from a module that manages the state of the
world if the condition is a partial world state, or it can
come from a module of player modeling if it depends
on the player state. In the case of an information re-
quest, the transition is activated if the predicate is true.
Signals are used for punctual events whereas informa-
tion requests are used to check more static conditions.
Consider an example consisting of 3 sub-
behaviors: Explore, Fight, and Gather. We define Ex-
plore as the initial sub-behavior, then if enemies are
encountered or food is found during the exploration,
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
212
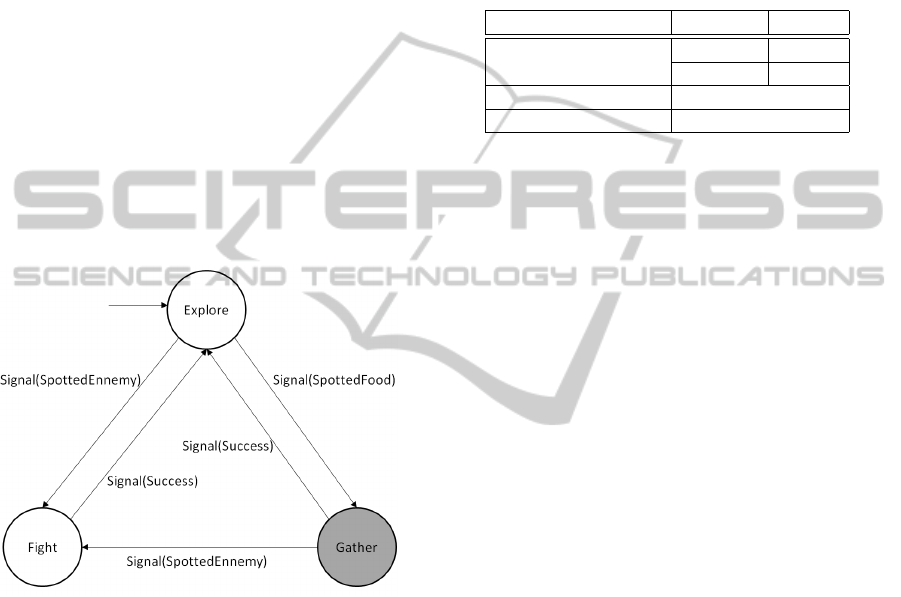
the sub-behaviors Fight or Gather, respectively, are
selected. When fighting of the enemy or gather-
ing of food terminates successfully, the Explore sub-
behavior is again selected. In case enemies are spot-
ted during the food gathering, the fight behavior is the
preferred selection. This example can be expressed
as follows. Note that here Gather is the currently se-
lected sub-behavior.
B = {Explore, Fight, Gather}
M = { <Explore, SpottedEnemy, Fight>,
<Explore, SpottedFood, Gather>,
<Fight, Success, Explore>,
<Gather, Success, Explore>,
<Gather, SpottedEnemy, Fight> }
SB = Explore
CB = Gather
A logical behavior can thus be represented as a
directed graph that can be cyclic, the sub-behaviors
being the nodes and M being the edges with OB as the
origin and DB as the destination. A graph illustrating
the example above is shown in figure 2.
Figure 2: Simple example of logical behavior.
3.1.3 Parallel Behaviors
A parallel behavior handles the distribution of re-
sources between its sub-behaviors. It is composed of
priority levels that are represented by a tuple <M, C>
where M is the maximum number of times the priority
can be executed in parallel and C is a set of compo-
nents. Sometimes there is no need for a maximum
value for M, especially when assigning default tasks
to all the remaining resources with the lowest priority
levels. In this case by convention we use the value -1
for M, simply to indicate that no limit is required. A
component is described as a tuple <B, W> where B
is a sub-behavior and W is a weight. The resources
are allocated to the first levels as long as possible and
until the number M is reached. The weights W are
used during the distribution of resources among the
sub-behaviors of the priority level, but are not useful
when there is a unique sub-behavior. A sub-behavior
can appear in several priority levels, but it cannot ap-
pear more than once in a priority level. The priority
and weight mechanisms allow the description of the
distribution of resources without knowing the exact
amount of available resources.
Table 1: Simple example of parallel behavior.
Maximum iterations Behavior Weight
2 Fight 1
Cover 2
1 Alert
-1 Explore
Considering table 1 as the selected behavior and
that each of its sub-behaviors need only 1 soldier, if
we suppose that 10 soldiers are available, the resource
allocator will proceed as follows: first it will use 3
soldiers for the first priority level, 1 for fighting, and
2 for covering. As the number associated (2) is not
attained, the resource allocator will continue with the
first priority level and allocate 3 soldiers again, 1 for
fighting and 2 for covering. The first priority level has
reached its maximum number of executions, so the re-
source allocator goes to the second priority level and
assigns a soldier to alert the others. The maximum
number of executions is also reached, so the third pri-
ority level is selected. As it does not have a number
associated, the remaining 3 soldiers are assigned to
the task Explore.
3.2 The Resource Model
A resource can be an object, an agent, but also a loca-
tion, or a skill. A hierarchy of resources is defined by
the game designer. Only the leaves can be used when
creating a resource, to define its type, but all the types
can be used to define the requirements of a primitive
task, meaning that when a resource is required to exe-
cute a behavior or a task, the type can be more or less
specific. For instance, figure 3 represents a hierar-
chy of types of resources. An agent of the game can
be a Soldier or a Worker, and the environment also
includes resources of type Sword and Shovel. This
means that a primitive task that requires 1 resource of
type Agent can be performed by a Soldier or a Worker.
More advanced options allow the game designer to in-
dicate if a task requires 2 resources of type Agent that
are of the same subtype, or of a different subtype, or
that it does not matter.
A resource is defined by the following characteris-
tics: its type cannot change during its lifetime; it can
TowardsaResource-basedModelofStrategytoHelpDesigningOpponentAIinRTSGames
213
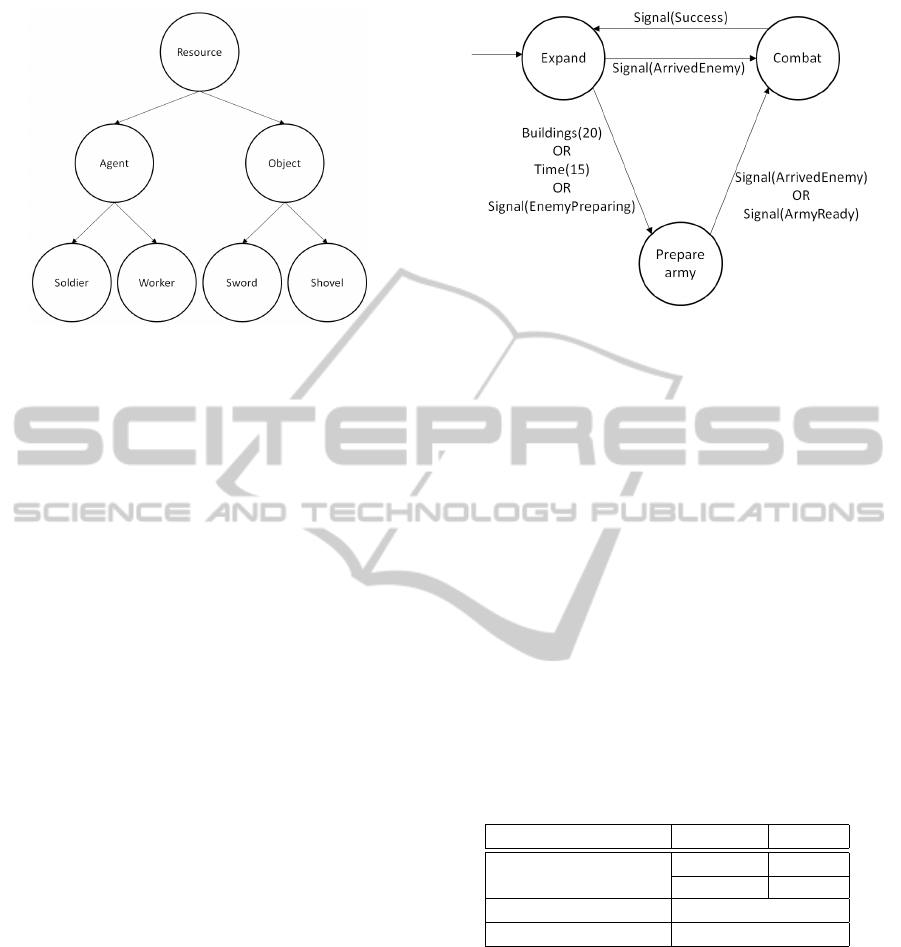
Figure 3: Resources hierarchy.
be destroyed or created by a primitive task; it can be
modified through destruction then creation of a new
resource.
3.3 Semantics
A semantic layer will be applied to the behavior to
clarify for the game designer the impact of the behav-
ior on the game experience. To do that, a typology
of feelings resulting from the experience of play will
allow the tagging of the behaviors, and the game de-
signer will be able to create the desired experience
in a logic behavior by selecting sub-behaviors tagged
with the appropriate feelings. For example an exter-
nal module can spot that the player plays a decreas-
ing number of actions per unit of times, deducing that
the player is becoming less involved, and send a sig-
nal that will trigger an aggressive behavior, causing a
battle requiring the player to be more active.
4 A USE CASE
The following example utilizes our model to build a
basic behavior in an environment which employs the
most common mechanisms found in RTS games: a
search is performed for mineral resources which can
then be extracted for the creation of buildings and
units (workers or soldiers). The buildings upgrade
knowledge and allow the construction of more effi-
cient soldiers. To simplify the understanding of the
proposed behavior, we will only provide a detailed
description of a small section of the overall strategy.
The overall strategy itself is shown in figure 4: the
strategy begins by creating buildings until it is consid-
ered necessary to start preparing an army by creating
soldiers, this eventually leads to an attack on the en-
emy. Several reasons can be found to start building
Figure 4: Overall strategy of the example.
an army: it can be a length of time, the number of
buildings created, but it can also be triggered by in-
telligence, for example if the enemy is also preparing
an army. If it is too late to prepare an army because
the enemy has managed to surprise us, combat mode
is engaged directly.
The Combat sub-behavior can be described as a
parallel behavior, as represented in table 2. The sol-
diers engage in combat but the workers will continue
to collect and transform resources to create more sol-
diers. Here, every soldier that attacks an enemy is
covered by another soldier. The Collect sub-behavior
is the default behavior so it is placed in the last posi-
tion. If there are not yet enough resources to create a
soldier, the sub-behavior Create soldier will not be as-
signed to workers and they will all collect resources.
As soon as there are enough resources to create a sol-
dier, a worker will be assigned to the task.
Table 2: Combat parallel behavior.
Maximum iterations Behavior Weight
-1 Fight 1
Cover 1
-1 Create soldier
-1 Collect
The sub-behaviors Fight and Cover are detailed in
Figure 5 and Figure 6, respectively. The Fight behav-
ior is relatively simple: shoot at the weakest enemy,
and if no enemy is in range, move toward the near-
est enemy soldier. The Cover behavior is a little more
complex and requires external signals and informa-
tion requests concerning the environment. It consists
of finding a hiding place and placing the soldier be-
hind it, ducking if necessary, then shooting at visible
enemies, and finally moving on if the covered soldier
has moved and the hiding place is no longer suited.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
214
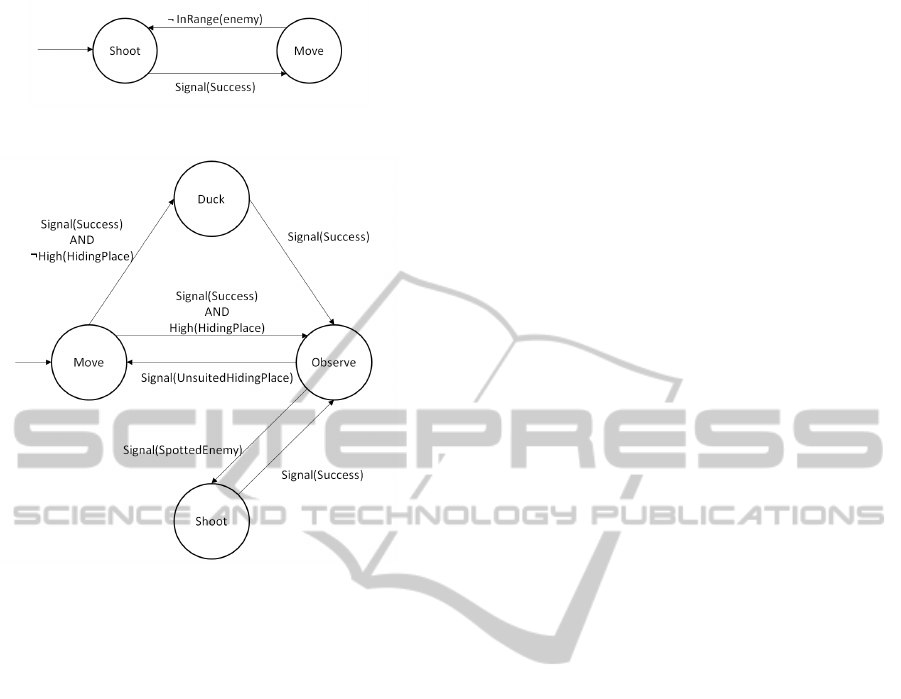
Figure 5: Fight logical behavior.
Figure 6: Cover logical behavior.
5 PERSPECTIVES AND FUTURE
WORK
We have presented a model that makes building col-
lective behaviour easy. The first step of our future
work is to extend expressivity by adding functionality
while retaining usability. One way to achieve this ob-
jective is to present the model to game designers, with
a view to making improvements following the recep-
tion of feedback that describes their needs. Indeed
this is the principle purpose of this model. The sec-
ond step will focus on the semantic layer; its purpose
is to highlight the player’s experience in the concep-
tion of AI behaviors. The associated vocabulary needs
to be defined, based on the work presented in section
2. The goal is to be able to automatically compute the
type of experience that a behavior can provide, so part
of the work will be to match experience types with the
characteristics of behaviors that cause them.
6 CONCLUSION
In this paper we presented a model for the definition
of strategic behavior for RTS games, whose speci-
ficity is to combine ease-of-use with the ability to pro-
duce high-performing strategic behaviors. The model
uses hierarchy and parallelism to be easily under-
standable. The agents are used as resources, using
proportion and priority to separate them on possible
tasks, making it adaptable for variable resources. A
strategy can easily be modified and sub-behaviors can
be extracted and reused. The model is part of a bigger
project which aims to provide a behavior generator,
meaning that the system could give to the game de-
signer a first strategy to work with, simply by defining
the primitive tasks. Future work will focus on making
it more accessible by adding a semantic layer.
REFERENCES
Bartle, R. (1996). Hearts, clubs, diamonds, spades: Players
who suit MUDs. Journal of MUD research, 1(1):19.
Bateman, C. and Boon, R. (2006). 21st Century Game De-
sign. Charles river media edition.
Buro, M. (2003). Real-time strategy games: A new AI re-
search challenge. In IJCAI, pages 1534–1535.
Churchill, D. and Buro, M. (2011). Build order optimiza-
tion in StarCraft. In AIIDE.
Dereszynski, E. W., Hostetler, J., Fern, A., Dietterich, T. G.,
Hoang, T.-T., and Udarbe, M. (2011). Learning prob-
abilistic behavior models in real-time strategy games.
In AIIDE.
Lazzaro, N. (2004). Why we play games: Four keys to more
emotion without story.
Malone, T. W. (1980). What makes things fun to learn?
heuristics for designing instructional computer games.
In Proceedings of the 3rd ACM SIGSMALL sympo-
sium and the first SIGPC symposium on Small sys-
tems, pages 162–169. ACM.
Nakamura, J. and Csikszentmihalyi, M. (2002). The con-
cept of flow. In Handbook of positive psychology,
pages 89–105.
Ontanon, S., Mishra, K., Sugandh, N., and Ram, A. (2007).
Case-based planning and execution for real-time strat-
egy games. In Case-Based Reasoning Research and
Development, pages 164–178. Springer.
Ontanon, S., Synnaeve, G., Uriarte, A., Richoux, F.,
Churchill, D., and Preuss, M. (2013). A survey of
real-time strategy game AI research and competition
in StarCraft. Computational Intelligence and AI in
Games, IEEE Transactions on, 5(4):293–311.
Orkin, J. (2004). Applying goal-oriented action planning to
games. In AI Game Programming Wisdom.
Palma, R., Gonzlez-Calero, P. A., Gmez-Martn, M. A., and
Gmez-Martn, P. P. (2011). Extending case-based plan-
ning with behavior trees. In FLAIRS Conference.
Read, J. C., MacFarlane, S. J., and Casey, C. (2002). En-
durability, engagement and expectations: Measuring
children’s fun. In Interaction design and children, vol-
ume 2, pages 1–23. Shaker Publishing Eindhoven.
TowardsaResource-basedModelofStrategytoHelpDesigningOpponentAIinRTSGames
215
