
Performance Evaluation of Bit-plane Slicing based Stereo Matching
Techniques
Chung-Chien Kao
1
and Huei-Yung Lin
2
1
Department of Electrical Engineering, National Chung Cheng University, 168 University Rd., Chiayi 621, Taiwan
2
Department of Electrical Engineering, Advanced Institute of Manufacturing with High-Tech Innovation,
National Chung Cheng University, 168 University Rd., Chiayi 621, Taiwan
Keywords:
Stereo Matching, Bit-plane Slicing, Hierarchical Processing.
Abstract:
In this paper, we propose a hierarchical framework for stereo matching. Similar to the conventional image
pyramids, a series of images with less and less information is constructed. The objective is to use bit-plane
slicing technique to investigate the feasibility of correspondence matching with less bits of intensity informa-
tion. In the experiments, stereo matching with various bit-rate image pairs are carried out using graph cut,
semi-global matching, and non-local aggregation methods. The results are submitted to Middlebury stereo
page for performance evaluation.
1 INTRODUCTION
Stereo matching is one of the most active research
areas in computer vision. In the existing stereo al-
gorithms, block matching techniques exploiting lo-
cal constraints and energy minimization for global
optimization have been extensively studied (Min and
Sohn, 2008; Chen et al., 2001; Szeliski et al., 2008;
Sun et al., 2003). While a large number of al-
gorithms for stereo correspondence matching have
been developed (Brown et al., 2003), relatively lit-
tle work has been done on characterizing their per-
formance (Hirschmuller and Scharstein, 2007). Since
Scharstein and Szeliski published a paper regarding
the taxonomy and evaluation of stereo correspon-
dence algorithms (Scharstein and Szeliski, 2002b),
many authors used various methods and algorithms to
participate in an on-line evaluation platform which is
known as Middlebury Stereo Evaluation (Scharstein
and Szeliski, 2002a). This on-line evaluation website
provides many stereo data sets to evaluate the perfor-
mance of stereo matching algorithms. Furthermore,
because the progress in stereo algorithm performance
is quickly outpacing the ability of existing stereo data
sets to discriminate among the best-performing algo-
rithms, (Scharstein and Szeliski, 2003) present new
stereo data sets to the on-line evaluation website,
which act as the four stereo data sets for the new Mid-
dlebury’s Stereo Evaluation - Version 2.
In this work, we address the feasibility of hierar-
chical stereo matching in the intensity domain (Lin
and Lin, 2013). Similar to the conventional image
pyramids, a series of images with less and less in-
formation is constructed hierarchically. They are cre-
ated with different intensity quantization levels. In
this kind of image presentation, more bits per pixel
will contain more detailed texture for stereo match-
ing. However, processing the low intensity quanti-
zation images generally requires less memory usage.
Thus, obtaining good disparity results without using
the full intensity depth of the images is an important
advantage for stereo matching algorithms (Humen-
berger et al., 2010; Lu et al., 2009).
Based on the previous investigation of stereo
matching on low intensity quantization images (Lin
and Chou, 2012), this paper evaluate the bit-plane
slicing techniques with recent well-known stereo al-
gorithms. The objective is to integrate the hierar-
chical framework with the high-performance stereo
matching techniques (Yang, 2012; Akhavan et al.,
2013), and report the improvement over the Mid-
dlebury Stereo Vision Page for on-line evaluation.
In the experiments, stereo matching on various bit-
rate image pairs is implemented using graph cut
(Kolmogorov and Zabin, 2004), semi-global match-
ing (Hirschmuller, 2008), and non-local aggregation
(Yang, 2012). The results demonstrate an alternative
for the development of stereo matching algorithms,
especially for the high intensity depth images.
365
Kao C. and Lin H..
Performance Evaluation of Bit-plane Slicing based Stereo Matching Techniques.
DOI: 10.5220/0005260203650370
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 365-370
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
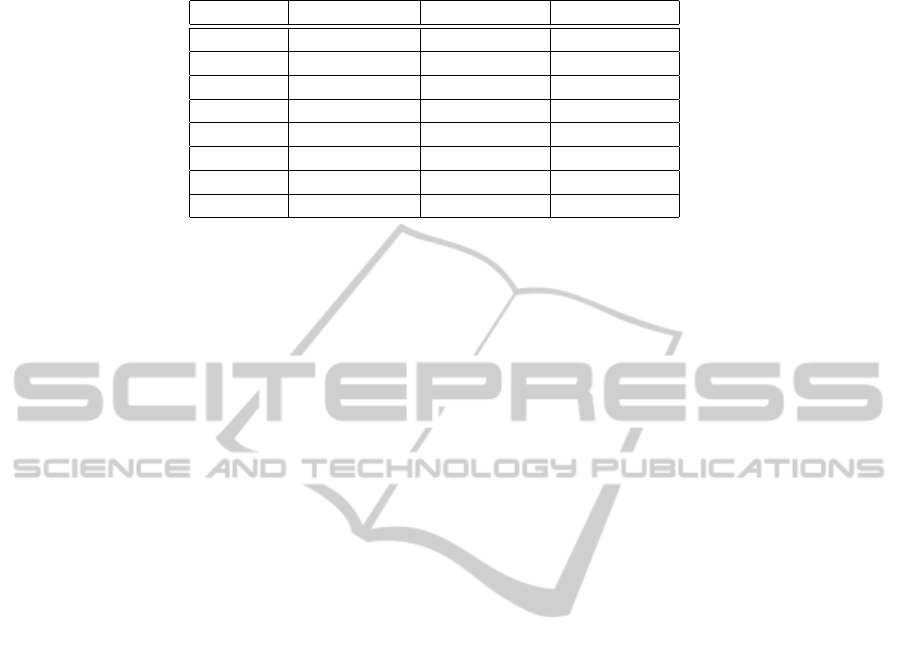
Table 1: The pixel values in bit-plane representation with binary format.
Bit-Plane Bit Preserved Slice Value Binary Value
0 Bit 0 (LSB) (0000 0000)
2
(0)
2
1 Bit 1 (0000 0010)
2
(1)
2
2 Bit 2 (0000 0000)
2
(0)
2
3 Bit 3 (0000 1000)
2
(1)
2
4 Bit 4 (0000 0000)
2
(0)
2
5 Bit 5 (0010 0000)
2
(1)
2
6 Bit 6 (0000 0000)
2
(0)
2
7 Bit 7 (MSB) (1000 0000)
2
(1)
2
2 THEORETICAL BACKGROUND
ON BIT-PLANE SLICING
We start by looking into a bit-plane sliced image, pre-
serving one bit per bit-plane while masking out all
other bits on each bit-plane. Given an 8-bit grayscale
image, we can slice an image into the following bit-
planes: Bit-plane 0 preserves only the least signifi-
cant bit (LSB) while Bit-plane 7 preserves only the
most significant bit (MSB). Adding all 8 bit-planes to-
gether will result in the 8-bit pixel value for the orig-
inal image. For easier understanding, a pixel’s bit-
plane sliced result is illustrated in Table 1.
For demonstration purposes, if the masked re-
maining bit is 1, we convert it to a binary image set-
ting that pixel to 1. On the other hand, if after mask-
ing a certain pixel results in a 0 value, we will show
it as 0 in the binary image. We do this to show how
much detail exists in each bit position for all 8 bits vi-
sually. The bit-layer slicing visual results are shown
in Fig. 1. We can clearly see that the bit-planes closer
to the MSB seem to preserve more important infor-
mation about the objects in the image. From this ob-
servation, if we could use fewer bits to calculate dense
stereo disparity maps, it would greatly reduce the total
bit-rate required, and thus reduce the memory usage,
communication bandwidth, etc.
To implement this idea, we combine the bit-planes
and form a “bit-plane pyramid”. The top-most plane
of the pyramid is the same as the bit-layer No. 7 in Ta-
ble 1. Stepping down in the pyramid each time we add
an extra bit-plane to the pyramid, and thus increase
the bit-rate while preserving more data from the orig-
inal image. The proposed “bit-plane pyramid” is il-
lustrated in Fig. 1. The goal is to use the least amount
of bits to achieve certain image quality requirement.
We implement and derive results from this bit-plane
pyramid used in dense stereo disparity map calcula-
tion.
In our proposed bit-plane pyramid, the lower lay-
ers (the bottom layers in the pyramid) in the hierar-
chy preserves more detailed information than the top
layers in the original image (Gong and Yang, 2001).
Note that the information reduced is in terms of the
representation using the image intensity, instead of
the image resolution. With less information needed
to be processed, stereo algorithms which originally
require a large amount of memory space may be re-
duced dramatically while maintaining good quality
stereo image disparity estimation output.
3 FRAMEWORK FOR EXISTING
STEREO MATCHING
ALGORITHMS
The proposed stereo matching framework is first car-
ried out on a low bit-rate image pair (Bit-layer 1 of the
bit-plane pyramid). If the resulting disparity meets
some quality requirements, the stereo matching algo-
rithms terminates. The process continues until the
disparity estimate is satisfactory or the finest level
(bit-layer 8 of the bit-plane pyramid) in the hierar-
chy is reached. While using the finest level may give
the best disparity result, the proposed technique min-
imizes the amount of data required to achieve certain
quality thresholds for disparity computation. Further-
more, in the experiments we sometimes find less bits
give better disparity results.
The chosen stereo matching algorithms are sep-
arated to two categories for performance evaluation.
The first category is for the ones which use 8-bit
grayscale stereo images as the input, and the second
category use 3-channel RGB color stereo image pair
as the input. These two implementations only differ
in the bit-slicing stage.
While the grayscale stereo image input is bit-plane
sliced hierarchically as described previously, 24-bit
RGB color stereo images need to be bit-plane sliced
by each of the three color channels simultaneously
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
366
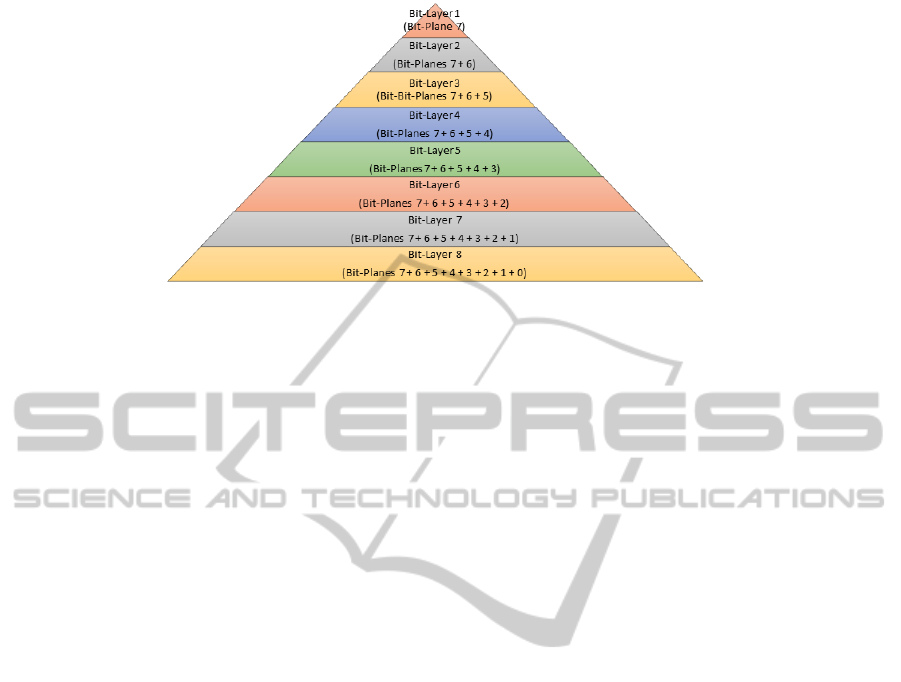
Figure 1: The image pyramid constructed with bit-plane slicing. Top layers contain less information and lower layers contain
more information, in terms of image intensity depth.
in the same way as grayscale images separately. For
instance, the top-most bit-plane (layer 1) of the bit-
plane pyramid for the color stereo images preserves
the most significant bit (MSB) from each of the 3
color channels forming a bit-plane sliced stereo im-
age pair. Layer 2 preserves top-most 2 bits of each
color channel (bit-plane 8 + bit-plane 7), and so on.
Fig. 2 shows the original image and all 8 layers of the
bit-plane pyramid. We can clearly see that using only
a few bits we still can show most details in an image.
To implement the bit-plane pyramid stereo match-
ing technique, we adopt the existing dense stereo al-
gorithms and integrate with our framework. The pro-
posed bit-plane slicing pyramid is tested with the al-
gorithms which the authors provided source code for
others to use. First we look into the OpenCV li-
brary and find that it provides 2 methods to calculate
a dense disparity map. Second, we survey the top per-
forming algorithms on the Middlebury Stereo Evalua-
tion site. In all submissions to the Middlebury Stereo
Evaluation website in the past 10 years, many authors
have provided source code for their stereo algorithms.
We’ve gathered a couple of submissions who also pro-
vided the source codes for testing.
OpenCV provides 3 implementations to com-
pute a disparity map for input rectified stereo im-
age pairs; all of these algorithms use single chan-
nel 8-bit grayscale stereo images as input. The first
one is a faster method called “block matching” by
Kurt Konolige (Konolige, 1997). It is a fast one-
pass stereo matching algorithm that uses sliding sums
of absolute differences between pixels in the left im-
age and the right image. It is fast but the results are
not so good unless the parameters are tuned accord-
ing to the input images. The second one is called
“semi-global block matching”, which is a variation to
(Hirschmuller, 2008). Since we match blocks rather
than individual pixels, the results are often better than
the first method. The third one is a “Kolmogorov’s
graph cuts-based” stereo correspondence algorithm
(Kolmogorov and Zabin, 2004). It gives the best re-
sults of all.
Middlebury stereo evaluation site provides the
evaluation of algorithms submitted to their web site
using specific data sets with ground-truth disparities.
There is also an on-line submission script to allow
evaluation of the stereo algorithm comparing it to
other existing submissions. In hundreds of submis-
sions, we choose a high ranked method “NonLocal-
Filter” (Yang, 2012) for testing. This algorithm and
many top performing methods takes color stereo im-
ages as input rather than grayscale to take advantage
of the additional color intensity data to compute ag-
gregation costs.
4 EXPERIMENTAL RESULTS
In the experiments, we use semi-global block match-
ing, graph cut based, and Non-local filter stereo algo-
rithms to test the bit-plane slicing method. The dis-
parity map results are shown in Figure 3. We then
submit the results to Middlebury stereo page for eval-
uation. The website provides online submission and
evaluation for provided disparity maps for stereo im-
age pairs, Tsukuba, Venus, Teddy and Cones. Sub-
mitted results will be compared with disparity map
ground truth, getting average percent of bad pixels
for each image pair. One thing worth noting is the
website evaluates disparities for the whole image (ex-
cept for a border region in the Tsukuba and Venus
stereo image pairs). So if the stereo algorithm does
not produce the disparity in occlusion and border ar-
eas, the stereo algorithm must extrapolate the dispar-
ities in those regions or else they will be seen as bad
pixels.
PerformanceEvaluationofBit-planeSlicingbasedStereoMatchingTechniques
367
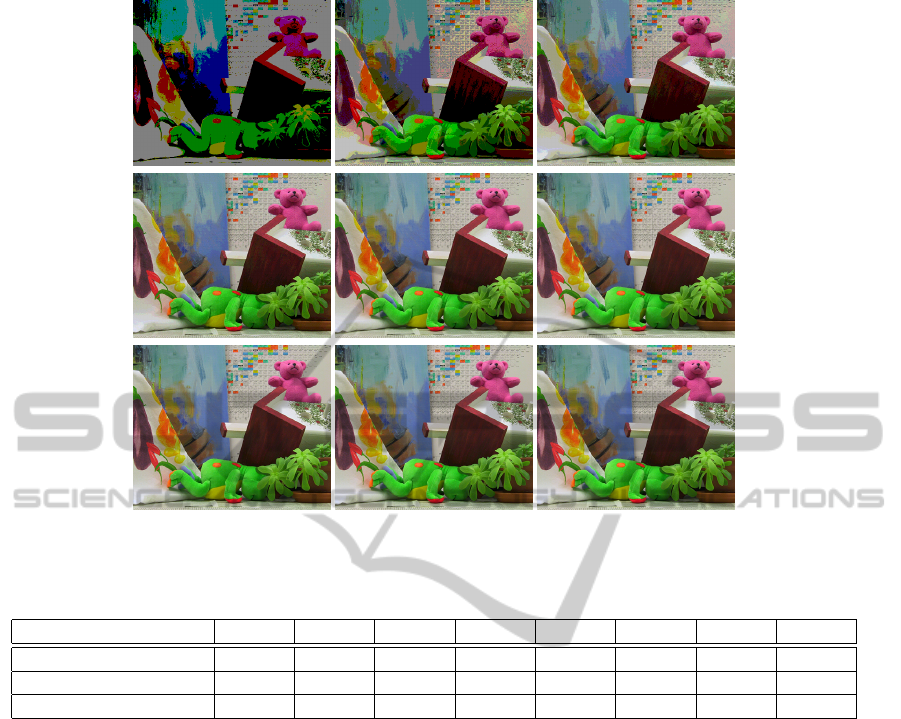
Figure 2: 24-bit RGB color image bit-plane sliced into 8 layers. From top-left to bottom-right: layer 1, layer 2, ..., layer 8,
and the original image.
Table 2: The averages of bad matching pixels (in percentage) obtained using SG, GC and NL algorithms.
Algorithm 8-bit 7-bit 6-bit 5-bit 4-bit 3-bit 2-bit 1-bit
Semi-global matching 20.6 % 20.7 % 21.0 % 21.5 % 22.8 % 24.8 % 30.6 % 38.8 %
Graph cut 14.4 % 14.7 % 14.5 % 15.1 % 16.0 % 17.9 % 41.8 % 52.2 %
Non-local aggregation 5.48 % 5.31 % 6.00 % 7.40 % 11.9 % 15.7 % 21.2 % 40.8 %
The evaluation with average percentage of bad
pixels and average rank is shown in Tables 2 and 3.
For semi-global matching, although the bad-pixel rate
and the average rank are not so good, it reduces only 1
percent of bad pixels with half of the image data (with
a 4-bit image). Graph cut method from OpenCV also
shows good results, losing only 2 - 3% of the aver-
age bad pixels compared to the one using all 8 bits.
Note that these two dense stereo algorithms use 8-bit
grayscale stereo images as input. On the other hand,
NonLocalFilter uses 24-bit RGB color stereo image
pairs as input (8 bits for each color channel). Bit-
plane slicing color stereo input images is done sim-
ilar to the 8-bit grayscale stereo pairs, but it is done
in each of the three color channels simultaneously. It
seems that taking the advantage of color stereo input
images gains the ability to calculate the aggregation
costs better. This results in having the best perfor-
mance when using all stereo pairs input data or even
when masking out lower-bits in each color channel.
It is noted that if we compare the disparity pre-
serving only top-most 2 bits and top-most 3 bits re-
sults, NonLocalFilter’s disparity map seems capable
of estimating objects in the foreground such as the
lamp (white shape in the disparity map) and the head
sculpture’s disparity still can be seen. Items with
larger disparities seems to vanish from disparity map.
This may have something to do with the color lumi-
nance existing in each 3 RGB color channels. On
the other hand, Graph cut’s disparity estimation per-
formance for foreground and background objects de-
grade evenly while masking input stereo image pair
bits.
5 CONCLUSIONS
In this work, a hierarchical stereo matching frame-
work is presented. A pyramid image representa-
tion is used to combine with existing stereo match-
ing algorithms for disparity computation. Graph-
cut, semi-global matching and non-local aggregation
methods are tested in our framework with various
bit-rate image pairs. The disparity computation for
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
368

(a) Semi-global matching (b) Graph-cut (c) Non-local filter
Figure 3: The disparity maps computed using the stereo matching algorithms, semi-global matching, graph-cut and non-local
aggregation.
PerformanceEvaluationofBit-planeSlicingbasedStereoMatchingTechniques
369
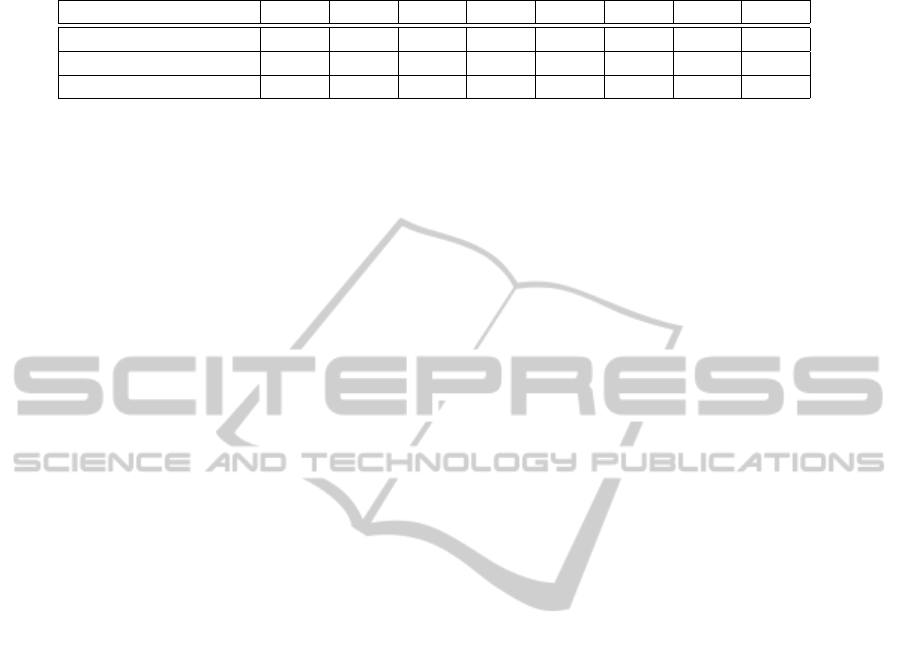
Table 3: The averages rank obtained by performing stereo matching using SG, GC and NL algorithms.
Algorithm 8-bit 7-bit 6-bit 5-bit 4-bit 3-bit 2-bit 1-bit
Semi-global matching 148.2 148.3 148.8 149.6 150.8 151.2 151.8 152
Graph cut 121.7 124 131.4 130.3 135.8 140.4 151.5 152
Non-local aggregation 45.4 43.2 65.5 89 117.2 137 149.3 151.9
stereo datasets are submitted to Middlebury stereo site
for performance evaluation. The results have demon-
strated the feasibility of our bit-plane slicing based
stereo matching framework.
ACKNOWLEDGEMENTS
The support of this work in part by the National Sci-
ence Council of Taiwan under Grant NSC-102-2221-
E-194-019 is gratefully acknowledged.
REFERENCES
Akhavan, T., Yoo, H., and Gelautz, M. (2013). A frame-
work for hdr stereo matching using multi-exposed im-
ages. In Proceedings of HDRi2013 - First Interna-
tional Conference and SME Workshop on HDR imag-
ing (2013).
Brown, M. Z., Burschka, D., and Hager, G. D. (2003). Ad-
vances in computational stereo. IEEE Trans. Pattern
Anal. Mach. Intell., 25(8):993–1008.
Chen, Y.-S., Hung, Y.-P., and Fuh, C.-S. (2001). Fast
block matching algorithm based on the winner-update
strategy. IEEE Transactions on Image Processing,
10(8):1212 –1222.
Gong, M. and Yang, Y.-H. (2001). Multi-resolution stereo
matching using genetic algorithm. In SMBV ’01: Pro-
ceedings of the IEEE Workshop on Stereo and Multi-
Baseline Vision (SMBV’01), page 21.
Hirschmuller, H. (2008). Stereo processing by semiglobal
matching and mutual information. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
30(2):328–341.
Hirschmuller, H. and Scharstein, D. (2007). Evaluation of
cost functions for stereo matching. In Computer Vi-
sion and Pattern Recognition, 2007. CVPR ’07. IEEE
Conference on, pages 1–8.
Humenberger, M., Zinner, C., Weber, M., Kubinger, W.,
and Vincze, M. (2010). A fast stereo matching algo-
rithm suitable for embedded real-time systems. Com-
puter Vision and Image Understanding, 114(11):1180
– 1202. Special issue on Embedded Vision.
Kolmogorov, V. and Zabin, R. (2004). What energy func-
tions can be minimized via graph cuts? Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
26(2):147–159.
Konolige, K. (1997). Small vision systems: hardware and
implementation. In Eighth International Symposium
on Robotics Research, page 111–116.
Lin, H.-Y. and Chou, X.-H. (2012). Stereo matching on low
intensity quantization images. In Pattern Recognition
(ICPR), 2012 21st International Conference on, pages
2618–2621.
Lin, H.-Y. and Lin, P.-Z. (2013). Hierarchical stereo match-
ing with image bit-plane slicing. Mach. Vision Appl.,
24(5):883–898.
Lu, J., Rogmans, S., Lafruit, G., and Catthoor, F. (2009).
Stream-centric stereo matching and view synthesis:
A high-speed approach on gpus. IEEE Transac-
tions on Circuits and Systems for Video Technology,
19(11):1598 –1611.
Min, D. and Sohn, K. (2008). Cost aggregation and oc-
clusion handling with wls in stereo matching. IEEE
Transactions on Image Processing, 17(8):1431 –1442.
Scharstein, D. and Szeliski, R. (2002a). Middlebury stereo
vision page. http://vision.middlebury.edu/stereo.
Scharstein, D. and Szeliski, R. (2002b). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. Int. J. Comput. Vision, 47(1-3):7–42.
Scharstein, D. and Szeliski, R. (2003). High-accuracy
stereo depth maps using structured light. In Com-
puter Vision and Pattern Recognition, 2003. Proceed-
ings. 2003 IEEE Computer Society Conference on,
volume 1, pages I–195–I–202 vol.1.
Sun, J., Zheng, N.-N., and Shum, H.-Y. (2003). Stereo
matching using belief propagation. IEEE Trans. Pat-
tern Anal. Mach. Intell., 25(7):787–800.
Szeliski, R., Zabih, R., Scharstein, D., Veksler, O., Kol-
mogorov, V., Agarwala, A., Tappen, M., and Rother,
C. (2008). A comparative study of energy min-
imization methods for markov random fields with
smoothness-based priors. IEEE Trans. Pattern Anal.
Mach. Intell., 30(6):1068–1080.
Yang, Q. (2012). A non-local cost aggregation method
for stereo matching. In Computer Vision and Pat-
tern Recognition (CVPR), 2012 IEEE Conference on,
pages 1402–1409.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
370
