
Improving Quality of Training Samples Through Exhaustless Generation
and Effective Selection for Deep Convolutional Neural Networks
Takayoshi Yamashita
1
, Taro Watasue
2
, Yuji Yamauchi
1
and Hironobu Fujiyoshi
1
1
Chubu University, 1200, Matsumoto-cho, Kasugai, Aichi, Japan
2
Tome R&D, kyoto, Japan
Keywords:
Deep Learning, CNN, Data Augmentation, Data Selection, MINIST.
Abstract:
Deep convolutional neural networks require a huge amount of data samples to train efficient networks. Al-
though many benchmarks manage to create abundant samples to be used for training, they lack efficiency when
trying to train convolutional neural networks up to their full potential. The data augmentation is one of the
solutions to this problem, but it does not consider the quality of samples, i.e. whether the augmented samples
are actually suitable for training or not. In this paper, we propose a method that will allow us to select effective
samples from an augmented sample set. The achievements of our method were 1) to be able to generate a large
amount of augmented samples from images with labeled data and multiple background images; and 2) to be
able to select effective samples from the additionally augmented ones through iterations of parameter updating
during the training process. We utilized exhaustless sample generation and effective sample selection in order
to perform recognition and segmentation tasks. It obtained the best performance in both tasks when compared
to other methods using, or not, sample generation and/or selection.
1 INTRODUCTION
Deep learning methods have been applied to many
challenging tasks including speech recognition, bioin-
formatics and object recognition. Among those,
Deep Convolutional Neural Networks (ConvNets)
are used in various benchmark tests for handwrit-
ten characters(Y. LeCun ad L. Bottou and P.Haffner,
1998), house numbers(Sermanet et al., 2012), traffic
signs(Ciresan et al., 2012) and ImageNet(Sutskever
and Hinton, 2012). ConvNets lead to significantly
advanced performance results with these dataset.
Krizhevsky et al. obtained impressive classification
performances using a large ConvNets and won the
ImageNet 2012(Sutskever and Hinton, 2012). Zeiler
et al. also utilized a ConvNets and applied it to not
only the recognition task but also the localization
challenge, winning the last ImageNet 2013(Zeiler and
Fergus, 2013). Because of these achievements, deep
learning including ConvNets is becoming a more and
more popular learning method.
The advantage of ConvNets is that it is able to ex-
tract complex and suitable features for the task. It can
reduce the burden of designing the features since the
entire system is trained from raw pixels.
Although many researchers have proposed meth-
ods to address the disadvantage of ConvNets, but it re-
mains that they require a huge amount of labeled sam-
ples. Although many benchmark methods can prepare
an abundant number of samples for training, this is of-
ten not just enough to fulfill all the learning potential
that ConvNets could actually achieve. Creating addi-
tional samples through data augmentation method is
one of the solutions to this problem as it enables us
to control at will the amount of samples to be used.
However, simple data augmentation does not take ac-
count of the quality of the augmented samples, i.e.
whether the additional samples will actually be useful
or not for training. While the amount of samples is
important for an effective training method, so is their
quality.
In this paper, we propose a method to select useful
samples from the ones generated through data aug-
mentation. First, we utilized an asynchronous sample
generation process. This data augmentation method
did not only use translation, scaling and rotation, but
also deformed the samples through elastic distortion.
Then, we selected the useful samples from all the aug-
mented ones through iterations of the parameter up-
date process. We applied this method to a ConvNets
and evaluated its performance for several tasks, in-
cluding recognition and segmentation. For the recog-
228
Yamashita T., Watasue T., Yamauchi Y. and Fujiyoshi H..
Improving Quality of Training Samples Through Exhaustless Generation and Effective Selection for Deep Convolutional Neural Networks.
DOI: 10.5220/0005263802280235
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 228-235
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

nition task, we tested the efficiency of our sample se-
lection method in MNIST for hand posture recogni-
tion with complex figures in shape variation. Further-
more, we applied our proposed method to a segmen-
tation task in order to show its wide application range.
The rest of this paper is organized as follows: The
related works and Convolutional Neural Networks are
briefly reviewed in Section 2 and 3. Our proposed
method is described in Section 4 and our experiment
results are given in Section 5. Finally, we present our
conclusions in Section 6.
2 RELATED WORKS
Since the early 1990’s, many researchers have pro-
posed methods that use ConvNets(Vaillant et al.,
1994)(Y. LeCun ad L. Bottou and P.Haffner, 1998).
More recently, ConvNets have demonstrated state
of the art performance for text detection(Delakisand
and Garcia, 2008), image recognition(Ciresan et al.,
2012), and pedestrian detection(Sermanet et al.,
2013)(Ouyang and Wang, 2013b)(Ouyang and Wang,
2013a). After being utilized by Krizhevsky et
al. to win the object recognition competition Im-
ageNet, ConvNets moved into the limelight and
their use spread in numerous computer vision re-
search fields(Sutskever and Hinton, 2012). ConvNets
achieved a breakthrough on the 1000-class ImageNet
task, and while they are mainly used for object recog-
nition, they have a tremendous potential of applica-
tions, like pedestrian detection as proposed by Ser-
manet(Sermanet et al., 2013). ConvNets combine
multi-stage features, skipped layers connections and
unsupervised pre-training with sparse coding. They
integrate both global shape information and local dis-
tinctive motif information. The unsupervised pre-
training initializes the filters at each layer and obtains
efficient filters in a fine tuning process. Ouyang et
al. proposed a pedestrian detection method using a
special ConvNets that obtained the filter output from
local regions(Ouyang and Wang, 2013b). Each lo-
cal region corresponded to a body part, such as the
head, upper body, left or right half body, and all re-
sponses were joined together in the final layer. Multi-
task applications are also a field of usage where Con-
vNets are able to achieve great results. Osadchy et
al. utilized ConvNets for simultaneous face detection
and pose estimation by directly predicting the param-
eters of face location and head pose(Osadchy et al.,
2007). Face location and head pose were represented
by high-dimensional points on a 3D manifold, and the
feature space was trained by ConvNets to output the
face location and head pose. ConvNets based segmen-
tation can also be used to perform object localization.
For example, training was done to classify the central
pixel of the window with an objectfs category label to
represent the said object with a bounding contour in-
stead of a traditional bounding box(Jain et al., 2007).
ConvNets, however, still have several disadvan-
tages that restrain their full potential. Although Con-
vNets represent high-dimentional features due to hav-
ing a lot of filter banks, the large number of parame-
ters also may cause overfitting problems. Many re-
searchers proposed various approaches to avoid over-
fitting. Here are the two main ones: Applying a
micro architecture to the ConvNets. (Scherer et al.,
2010)(Boureau et al., 2010)(Goodfellow et al., 2013);
and Using data augmentation. Data augmentation
is known as the easiest and most common method
to reduce overfitting on training data. Augmented
data is obtained by artificially enlarging the data set
but preserving their labels. Put simply, the amount
of data is augmented by cropping different regions
from the same image and mirroring them(Sutskever
and Hinton, 2012)(Hinton et al., 2012). Additional
transformations such as scaling or rotation can also
be applied (Wan et al., 2013). Simard proposed a
highly advanced deformation method called elastic
distortion, effective for handwritten character recog-
nition(Simard et al., 2003). We found that elastic dis-
tortion is also useful in hand posture recognition (see
Section 5). However, training a huge amount of pa-
rameters using augmented data takes a lot of time. In
order to reduce learning time, vast parallel comput-
ing with GPU is often used. Fortunately, some GPU
computing software packages that can train ConvNets
are nowadays available(Sermanet et al., 2013). Com-
monly, GPU parallelization is used when updating pa-
rameters. Even though GPU helps updating the pa-
rameters faster, it requires complex data augmenta-
tion that can be a bottleneck to the training process.
Krizhevsky et al. implemented simple data augmen-
tation in Python on CPU while parameter updating
is computed on GPU(Sutskever and Hinton, 2012).
Nevertheless, when a highly effective and highly so-
phisticated data augmentation process is required, if
both the data generation and the parameters refine-
ment are run on the same process, the whole takes
quite some time to complete the training. However, if
data augmentation and parameter updating are sepa-
rate process and those two can asynchronously access
the data, then the program is kept simple and training
time can be reduced. Yet, approaches like these only
focus on the mass-generation of training data and do
not provide solutions to the issues of the effectiveness
of the samples to train or the selection of such high
performing samples. That is, there must be some ef-
ImprovingQualityofTrainingSamplesThroughExhaustlessGenerationandEffectiveSelectionforDeepConvolutional
NeuralNetworks
229

fective sample selection method used to achieve high
performance while using relatively less samples. We
also focus on these issues.
3 CONVOLUTIONAL NEURAL
NETWORK
ConvNets (Y. LeCun ad L. Bottou and P.Haffner,
1998) contain an alternate succession of convolu-
tional layers and subsampling layers, based on the
notion of local receptive fields discovered by Hubel
(Hubel and Wiesel, 1962). There are several types
of layers, including input layers, convolutional lay-
ers, pooling layers and classification layers. Each in-
put layer also has, besides the raw data, edge and nor-
malized data as input. The convolutional layer has M
kernels with size (Kx × Ky) and filters them in order
to input data. The filtered responses from all the input
data are then subsampled in the pooling layer. Scherer
(Scherer et al., 2010) found that max pooling can
lead to faster convergence and improved generaliza-
tion, while Boureau (Boureau et al., 2010) analyzed
theoretical feature pooling. Max pooling can output
the maximum value in certain regions such as a 2 × 2
pixel. The convolutional layer and pooling layer are
laid alternatively in order to create the deep network
architecture. Finally, the output feature vectors from
the last pooling layer are used in the classification
layer. The classification layer will output the prob-
ability of each class through a soft max connection
of all the nodes with weights in the previous layer.
Unlike Belief neural networks, ConvNets assume su-
pervised learning where filters are randomly initial-
ized and updated through backpropagation (Rumel-
hart et al., 1986) (Duffer and Garcia, 2007).
3.1 Training of Convolutional Neural
Networks
ConvNets are trained by backpropagation just as
general neural networks. Backpropagation uses the
function shown in Eq.(1) to estimate the connected
weights with minimized E by gradient descent in
Eq.(2).
E =
1
2
P
∑
p=1
E
p
(1)
w
(l)
ji
← w
(l)
ji
+ ∆w
(l)
ji
= w
(l)
ji
− λ
∂E
p
∂w
(l)
ji
(2)
Note that {p|1, ..., P} is the training sample, o
o
o
p
is
the corresponding value of training sample p in out-
put layer and t
t
t
p
is the label data of p. λ is the training
ratio, w
(l)
ji
is the weight that connects from the node
i in layer l to the node j in the next layer. The error
for each training sample E
p
is the sum of the differ-
ences between the output value and the label. ∆w
(l)
ji
is
represented as following Eq.(3).
∆w
(l)
ji
= −λδ
(l)
k
y
(l−1)
j
(3)
δ
(l)
k
= e
k
ϕ(V
(l)
k
) (4)
V
(l)
k
=
∑
j
w
(l)
k j
∗ y
(l−1)
j
(5)
y
(l−1)
j
is the output of the node j in the (l − 1)th
layer and e
k
is the error of node kD V
(l−1)
k
is the ac-
cumulated value connected to node k from all nodes
in the (l − 1)th layer. The local gradient descent is
obtained by Eq.(4). The activation function ϕ has
variation such as sigmoid, hyperbolic tangent and
ReLu(Sutskever and Hinton, 2012). The connected
weights in the entire network are updated concur-
rently for a predetermined number of times, or until
reaching the satisfying convergence condition.
Backpropagation has multiple ways to calculate
the error E, including full-batch, online and Mini-
batch. Full-batch gives all training data at once. As
such, it requires few iterations but is weak for conver-
gence due to the increasing gradient descent. Online
gives the training data iteratively. As such, it obtains
optimized results from its small gradient descent, but
requires lengthy processing time due to its numerous
iterations. Mini-batch is a commonly used middle ap-
proach that updates the weight with small subsets of
training data. It is able to effectively update connected
weights with a huge amount of training data in a real-
istic time length.
4 PROPOSED METHOD
The conventional ConvNets method trains from a
huge yet limited amount of training samples. In most
cases, the training process divides the training sam-
ples into subsets of mini-batch size and uses them
to update the parameters. When the training pro-
cess finishes using all the subsets, it starts receiving
data again from first subset through a process called
epoch. While this enables a continuous updating of
the parameters, it has distinctive limitations in the
variation of its samples. We can assume that varia-
tion in the data to be continuously given to the net-
work is significantly important when trying to obtain
the best parameters. To demonstrate this assumption
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
230
!"#$%&'(&)&*"+,)
-*".).)('/"#$%&/'
0'123345
6"7"'"8(#&)7"+,)
98(#&)7&6'/"#$%&/'
0':'2;5
<"=>"(&
?,)@A&7/'7*".).)(
B).+"%')&7C,*>/
<"*"#&7&*/'8$6"+)(
D.)"%')&7C,*>/
#.).'E"7=F
9/G)=F*,),8/!
8$6"+)(
%,"6
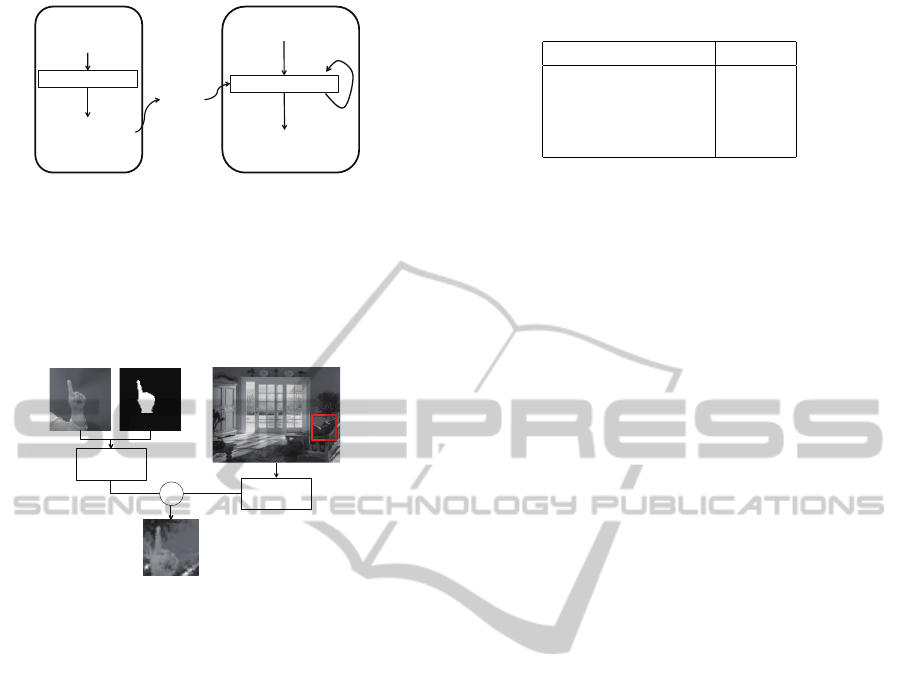
Figure 1: Entire training system. It consists of two parts,
sample generation and ConvNets training. The sample gen-
eration make the augmentation samples through data aug-
mentation from basis training samples. The package that
contain certain samples is utilized parameter updating of
networks. The package are asynchronously updated and re-
loaded to training process.
!"#$%&'()$*+,%+-'.'
(/0+,1#%+-'
!"#$%&'()$*+,%+-'.'
(/0+,1#%+-'
!
2#$)$')1#3/!
2)-#,4')1#3/!
2#&53,+6-(')1#3/!
7631/-*/(')1#3/!
Figure 2: Sample generation process. The augmented im-
age is made by elastic distortion and deformation of scaling,
rotation and translation from basis image and binary image.
It also synthesizes object image and background image.
and achieve better results than the ones that can be
obtained by concrete training samples, we propose
here a method for an asynchronous exhaustless sam-
ple generation coupled with an effective sample se-
lection during parameter updating. We illustrated the
entire training system in Fig.1. The system consists
of two processes, data augmentation and ConvNets
training. The data augmentation continuously creates
a package that includes a certain amount of training
samples, while the ConvNets training updates the pa-
rameters using selected effective samples from the
package. The package is loaded to ConvNets and
used for training, and when all training samples in the
package are used, the package is reloaded. We will
describe details of the sample generation and selec-
tion in the following sections.
4.1 Exhaustless Sample Generation
ConvNets training requires samples with broad vari-
ation including non-controlled backgrounds if it is to
be used for real-world applications. Each sample we
used is generated through data augmentation. We start
with binary labeled data and multiple background im-
Table 1: Deformation range of each factor.
deformation factor range
translation ±3
scaling ± 5%
rotation ± 5
brightness ± 10%
ages to create a vast combination of samples through
elastic distortion, as shown in Fig.2. The elastic dis-
tortion arranges the corresponding new target position
x
∗
from the original position of every pixel. The new
target position x
x
x
∗
is derived from random displace-
ment and is applied a scaling factor α as follows,
x
x
x
∗
= x
x
x + α∆x
x
x. (6)
∆x
x
x is a random real value between -1 and 1 with uni-
form distribution. Like the method used by Simard,
∆x
x
x is convolved with Gaussian of standard deviation
σ to obtain smoothed displacements(Simard et al.,
2003). The value at position x
x
x
∗
is computed through
the neighboring pixels using bilinear interpolation.
After applying elastic distortion on both the sam-
ple images and the binary labeled data, the synthetic
images are then synthesized with background images
while applying scaling, rotation and translation. We
define the deformation range in Table.1. The back-
ground regions are randomly cropped from the origi-
nal images.
Sample generation results in a package that in-
cludes a set amount of synthetic images. That pack-
age is then updated asynchronously to avoid the recy-
cling of the same samples during the training process.
4.2 Effective Sample Selection
We employ a sample selection of data to obtain ef-
fective training samples from the package, as the data
augmentation process itself does not take in factor the
quality of the additional samples generated. Varia-
tion within training samples data is quite important
when training sophisticated networks. Using only
elementary samples repeatedly for training does not
tend to provide great results. The current training net-
works require an increasing difficulty in their samples
in order achieve their expected performances in real
environments and avoid over fitting. For our effec-
tive sample selection, we evaluate all the samples in
the package using current networks and sort them by
worse error order. Then, a set amount of samples M
from the worse ones are used for training while the
rest of the samples that were recognized correctly are
discarded.
ImprovingQualityofTrainingSamplesThroughExhaustlessGenerationandEffectiveSelectionforDeepConvolutional
NeuralNetworks
231
!"#$%&'()*+
,-".-/$0-"
1)2&#--/'"*
1)2&-$%
,-".-/$0-"
3'/%+4+5&()#6
3'/%+4+5&()#6&
789:&6';+<
3'/%+4+5&()#6&
789:&()#6<
3$//=&>-""+>0-"
,/)66'@>)0-"
(a)
!"#$%&'()*+
,-".-/$0-"
1)2&#--/'"*
1)2&-$%
,-".-/$0-"
3'/%+4+5&()#6
3'/%+4+5&()#6&
789:&6';+<
3'/%+4+5&()#6&
789:&()#6<
3$//=&>-""+>0-"
?'")4';)0-"
?'")4=&'()*+&&
(b)
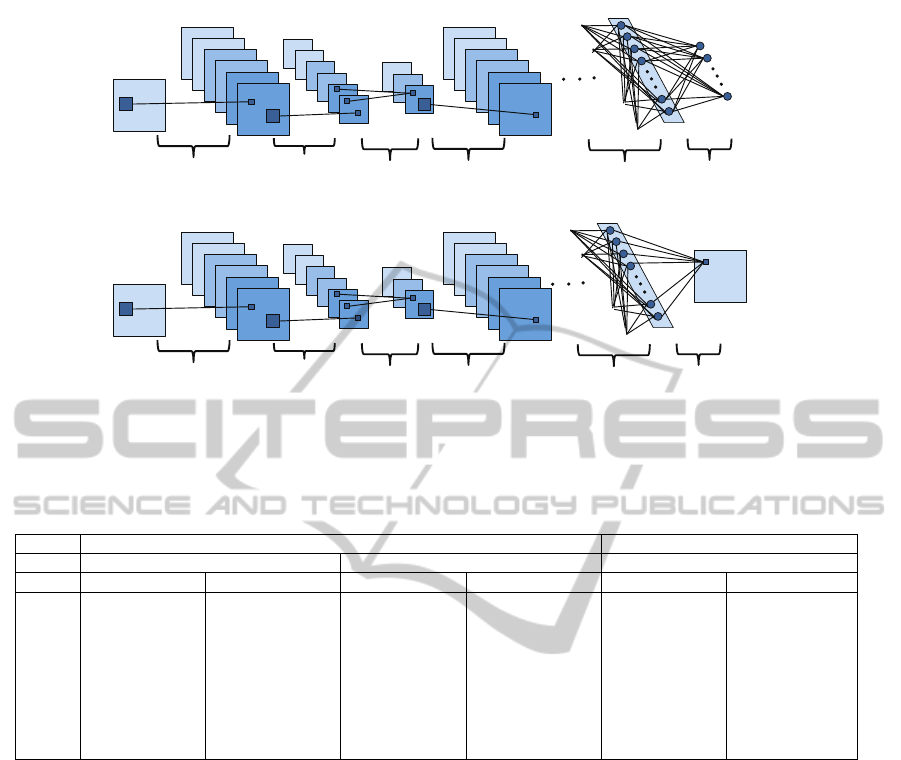
Figure 3: Architecture of our networks. (a) is the networks for recognition task. It has convolution, max pooling, maxout,
fully connected and classification layers. (b) is the networks for segmentation task. It has the binarization layer instead of
classification layer.
Table 2: Architecture of networks for each dataset.
Recognition task (Fig.3(a)) segmentation task (Fig.3(b))
MNIST Hand Shape Hand Shape
layer type size, # of kernels type size, # of kernels type size,# of kernels
input grayscale 28×28 grayscale 40×40 grayscale 40×40
1st convolution 5×5, 40 convolution 5×5, 40 convolution 5×5, 40
2nd max pooling 2×2 max pooling 2×2 max pooling 2×2
3rd maxout 2 maxout 2 maxout 2
4th convolution 5×5, 400 convolution 5×5, 40 convolution 5×5,40
5th max pooling 2×2 max pooling 2×2 max pooling 2×2
6th maxout 2 maxout 2 maxout 2
7th fully connected 100 fully connected 100 fully connected 400
output soft max 10 soft max 6 L2 norm 1600
4.3 Architecture of Networks
The network architecture for our method is shown in
Fig.3. It consists of six layer types, i.e. convolutional,
max pooling, maxout, fully connected, binarization
and classification layers. The architectures are set up
individually for each task. As shown in Fig.3(a), the
recognition task utilizes the convolutional, max pool-
ing, maxout, fully connected and classification layers,
but not the binarization layer. However, the binariza-
tion layer comes in handy for the segmentation task,
as illustrated in Fig.3(b). Each parameter, such as the
kernel size in the convolutional layer and the number
of nodes in the fully connected layer, are predefined
for the experiment.
Max pooling can help the network achieve faster
convergence and improves generalization. Unlike
Krizhevsky and Schmidhuber methods, we employ
maxout following max pooling as same as (Goodfel-
low et al., 2013). While max pooling selects the max-
imum output from the same map produced by a kernel
and subsamples the map size to half, maxout selects
the maximum value from several maps and reduces
their number. The fully connected layer receives high
dimensional feature vectors by flattening the output of
previous layer. It then trains with dropout and output
specific dimensional feature vectors.
For the segmentation task, the feature vectors are
input in the binarization layer in order to obtain bi-
nary image. This layer output the probability of each
pixel of being part of an object or not. The classifica-
tion layer produces a distribution of each class labels
using soft max. When training the network, all the
parameters are optimized through backpropagation.
4.4 Input Layer
The network is trained with a large amount of data to
reduce over fitting. However, as it is difficult to collect
a huge amount of labelled data, the elastic distortions
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
232

described in 4.2 is employed to increase the amount
of data from the initial limited dataset. This data aug-
mentation method is applied to both the original im-
age and the binary labeled data in the segmentation
task.
4.5 Pooling Layer
We employ maxout to avoid the drawbacks of a tra-
ditional activation function design (Goodfellow et al.,
2013). This results in a higher representation com-
pared to a ReLU nonlinearity (Sutskever and Hin-
ton, 2012). The common activation function h
i
in
h
h
h = (h
1
, ...h
i
, i ∈ I) is defined as in Eq. (7):
h
i
= σ(x
T
W
i
+ b
i
). (7)
σ(·) is the sigmoid function, x is the input vector, W
i
is the weight and b
i
is the bias. The maxout selects the
maximum value from several filtered output kernels,
as Eq.(8):
h
i
= max
j∈[1,k]
z
i j
, (8)
z
i j
= x
T
W
i j
+ b
i j
(9)
Unlike max pooling, maxout selects the maximum
output from several maps.
4.6 Fully Connected Layer
Dropout is an efficient method to reduce overfitting
and improve generalization (Hinton et al., 2012). It
randomly samples hidden units with a probability of
50%. The features of the selected units are then used
for optimization during each iteration of the training
process. Dropout is also used for training in the fully
connected layer.
4.7 Binarization Layer
For the segmentation task, we utilize a binarization
layer based on a fully connected layer. The output
node of the binarization layer receives the value of
all the input nodes that are the response of the previ-
ous layer. Each node output the probability of corre-
sponding to a pixel of the sample image. As such, the
number of output nodes is the same as the number of
pixels of the sample image.
4.8 Network Training
All W
W
W parameters, such as the kernel elements, the
weights between the units and the bias, are randomly
initialized. We use backpropagation to update the pa-
rameters W
W
W
t+1
in iteration t + 1 as defined in Eq.(10):
W
W
W
t+1
= W
W
W
t
− ε
t+1
∂E
∂W
W
W
(10)
Figure 4: Example of evaluation dataset including 6 classes
based on the number of upped fingers. Each hand posture
class is identified by the number of up fingers displayed,
with ”0” for a closed fist and ”5” for an open palm.
Soft max is used for the loss function E in the clas-
sification layer as follows:
E
i
=
exp(h
i
)
∑
M
j=1
exp(h
j
)
, (11)
E = −log(E
i
). (12)
E is derived from E
i
, the loss function of node i with
label y of the training sample, and M is the number of
total output nodes.
Meanwhile, we utilize the L2 norm for the loss
function E in the binarization layer as described in
Eq.(13):
E = ||h
h
h −
−
− y
y
y||
2
(13)
The update efficiency will decrease depending on
the update time t as defined in Eq.(14):
ε
t+1
=
ε
0
τ
max(t, τ)
(14)
The ε
0
is initially update-efficient and τ is the defined
parameter.
5 EXPERIMENT
We perform an experiment to demonstrate the effect
of our proposed exhaustless sample generation and
effective selection method for several tasks. First,
we evaluate it in MNIST, including ten classes for
handwritten digits. Although MNIST is an appropri-
ate dataset for a recognition task, its background is
quite simple and it is easy to obtain a high recogni-
tion performance when using it with state of the art
methods. Because of this, we prepare a hand pos-
ture dataset that is more complicated, including object
variation like handwritten digits under cluttered back-
grounds, as shown in Fig.4. In addition, the dataset
has binary images in order to perform the segmen-
tation task. It includes six hand shape classes based
on the number of upward fingers and each class has
scale, position and rotation variations. We evaluate
the recognition performance with both MNIST and
our hand posture dataset. We also evaluate the seg-
mentation performance with the hand posture dataset.
ImprovingQualityofTrainingSamplesThroughExhaustlessGenerationandEffectiveSelectionforDeepConvolutional
NeuralNetworks
233
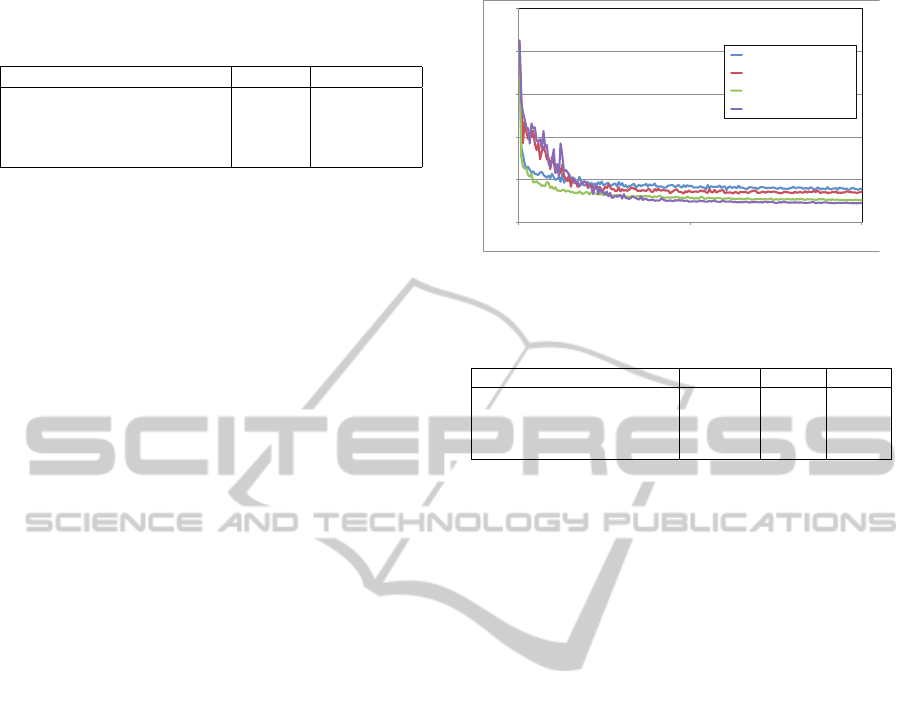
Table 3: The classification error depends on the presence or
absence of sample generation and selection.
methods MNIST Hand Shape
generation & selection 0.57% 9.0%
no generation & selection 0.77% 14.4%
generation & no selection 0.71% 10.6%
no generation & no selection 0.89% 15.6%
The network architectures for each individual dataset
are as described in Table 2. In the sample selection,
training samples are sorted based on Eqns.(12)(13)
in descending order. The first 50% samples are se-
lected and randomly shuffled to reduce the bias in
mini batch.
5.1 MNIST
MNIST contains 50000 images of each class for train-
ing and 10000 images for testing. The baseline, in
which no data generation and data selection is used,
is trained only with the original training samples. The
method using only sample selection uses the effec-
tive samples from the original ones. The method us-
ing only sample generation creates and uses the aug-
mented samples from original ones. The method us-
ing both generation and selection uses the effective
samples from the augmented samples. All methods
perform update of the network parameters through
200000 iterations using a mini-batch that included 10
samples from above ones. The methods with sample
generation renew the package that contains the aug-
mented samples. The updating parameters τ and ε
0
are set to 20000 and 0.006 respectively. We imple-
mented the methods using Theano library and train
the network on a NVIDIA GT640 2GB GPU. The
error for each method is displayed in Table 3. The
method using both sample generation and selection
achieves the best performance. There are just slight
differences between the results of the other methods
due to the dataset being composed of images with a
simple black background.
5.2 Recognition of Hand Shape
To evaluate the network in a more challenging envi-
ronment, e.g. like under cluttered background, we
collect images presenting shape variations in the same
class and illumination changes. The basic dataset
contains 1600 original grayscale and binary images
for each class. Our proposed method synthesizes
augmented images from the basic dataset with the
background images, as described in previous section.
We stored a set amount of augmented samples in the
package, here 1000 images. For a mini-batch size of
!"
!#$"
!#%"
!#&"
!#'"
("
!" $!!!!" %!!!!" &!!!!" '!!!!" (!!!!!" ($!!!!" (%!!!!" (&!!!!" ('!!!!"
$!!!!!"
)**+*
,"+-"./0*12+34
5+"6030*12+3"7"5+"408092+3"
5+"6030*12+3"7"408092+3"
:030*12+3"7"5+"408092+3"
:030*12+3"7";08092+3"
Figure 5: Test error rate in each iteration.
Table 4: The binarization precision-recall rate depends on
the presence or absence of data generation and selection.
methods precision recall f value
generation & selection 0.9023 0.9298 0.9158
no generation & selection 0.8957 0.8909 0.8933
generation & no selection 0.9036 0.9249 0.9141
no generation & no selection 0.8958 0.9008 0.8983
10, the number of iterations for the package is 100.
The package is updated asynchronously until all the
iterations are completed. After the network parame-
ters are updated with 200000 iterations, the total aug-
mented sample number amounted to 2 million indi-
vidual images. The comparison results are show in
Fig. 5 and Table 3. The method with sample genera-
tion and selection is best performance in the dataset.
We can conclude that this is an efficient method for
sample generation and selection.
5.3 Segmentation of Hand Shape
We also evaluate the efficiency of our proposed ap-
proach for the segmentation task. We prepare a
dataset of binary images of hand shapes. Through
data generation, we create the augmented images with
their corresponding labeled images. We compare the
methods by precision-recall rate as shown in Table 4.
From comparison results, the sample generation and
selection methods are efficient for segmentation task.
The output of the binarization layer with 130000 iter-
ations is shown in Fig.6. Even with a grayscale image
input, the network successfully extracts the hand re-
gion under a cluttered background. Furthermore, it is
robust to not only the background but also to illumi-
nation changes.
6 CONCLUSION
We proposed a sample generation and selection ap-
proach for ConvNets. Sample generation is per-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
234

Figure 6: Output of binarization layer: the 1st and 3rd
columns are original images and the 2nd and 4th are out-
put images.
formed asynchronously to create a package including
augmented samples in order to reduce the processing
time. The effective samples are selected from that
package and used to update the parameters. The ex-
haustless sample generation and effective sample se-
lection methods are used in an efficient combination
in order to train the network using a huge amount of
samples, all the while keeping the sample quality. Af-
ter comparison, our proposed approach is not only
useful for the recognition task, but also for the seg-
mentation task. While this is still in its primitive state
for sample generation and selection, we will continue
our research by applying this proposed approach to
other datasets and more challenging recognition tasks.
REFERENCES
Boureau, Y., Bach, F., LeCun, Y., and j. Ponce (2010).
Learning mid-level features for recognition. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion(CVPR2010).
Ciresan, D., Meier, U., and Schmidhuber, J. (2012). Multi-
column deep neural networks for image classification.
In IEEE Conference on Computer Vision and Pattern
Recognition(CVPR2012).
Delakisand, M. and Garcia, C. (2008). Text detection with
convolutional neural networks. In InternationalCon-
ference on Computer Vision Theory and Applications
(VISAPP 2008).
Duffer, S. and Garcia, C. (2007). An online backpropa-
gation algorithm with validation error-based adaptive
learning rate. In In International Conference on Artifi-
cial Neural Networks (ICANN), volume 1, pages 958–
962.
Goodfellow, I., Warde-Farley, D., Mirza, M., Courville, A.,
and Bengio, Y. (2013). Maxout networks. In arXiv
preprint arXiv:1302.4389.
Hinton, G. E., Srivastava, N., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. R. (2012). Improving neural
networks by preventing co-adaptation of feature de-
tectors. In arXiv preprint arXiv:1207.0580.
Hubel, D. and Wiesel, T. (1962). Receptive fields, binocu-
lar interaction and functional architecture in the cat’s
visual cortex. Journal of Physiology, 160:106–154.
Jain, V., Murray, J., Roth, F., and Turaga, S. (2007). Super-
vised learning of image restoration with convolutional
networks. In IEEE International Conference on Com-
puter Vision (ICCV2007).
Osadchy, M., LeCun, Y., and Mille, M. (2007). Synergistic
face detection and pose estimation with energy-based
models. In Journal of Machine Learning Research,
number 1197-1215, page 8.
Ouyang, W. and Wang, X. (2013a). Joint deep learning for
pedestrian detection. In IEEE International Confer-
ence on Computer Vision (ICCV2013).
Ouyang, W. and Wang, X. (2013b). Single-pedestrian de-
tection aided by multi-pedestrian detection. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion(CVPR2013).
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning internal representations by error propaga-
tion. Parallel Distributed Processing:Explorations in
the Microstructures of Cognition, 1:318–362.
Scherer, D., Muller, A., and S.Behnke (2010). Evaluation of
pooling operations in convolutional architectures for
object recognition. In International Conference on Ar-
tificial Neural Networks(ICANN2010).
Sermanet, P., Chintala, S., and LeCun, Y. (2012). Convolu-
tional neural networks applied to house numbers digit
classification. In International Conference on Pattern
Recognition (ICPR 2012).
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R., and LeCun, Y. (2013). Overfeat: Integrated recog-
nition, localization and detection using convolutional
networks. In arXiv preprint arXiv:1312.6229.
Simard, P., Steinkraus, D., and Platt, J. (2003). Best prac-
tices for convolutional neural networks applied to vi-
sual document analysis. In In International Con-
ference on Document Analysis and Recognition, vol-
ume 2, pages 958–962.
Sutskever, A. K. I. and Hinton, G. (2012). magenet classi-
fication with deep convolutional neural networks. In
Advances in Neural Information Processing Systems
25(NIPS2012).
Vaillant, R., Monrocq, C., and LeCun, Y. (1994). Origi-
nal approach for the localisation of objects in images.
volume 4, pages 245–250.
Wan, L., Zeiler, M., Zhang, S., LeCun, Y., and Fergus, R.
(2013). Regularization of neural networks using drop-
connect. In In International Conference on Machine
Learning (ICML2013).
Y. LeCun ad L. Bottou, Y. B. and P.Haffner (1998).
Gradient-basedlearning applied to document recogni-
tion. In Proceedings of the IEEE, 86(11):2278–2324.
Zeiler, M. D. and Fergus, R. (2013). Visualizing and un-
derstanding convolutional networks. In arXiv preprint
arXiv:1311.2901.
ImprovingQualityofTrainingSamplesThroughExhaustlessGenerationandEffectiveSelectionforDeepConvolutional
NeuralNetworks
235
