
Recent Developments in Skin Deformation for Character Animation
Shaojun Bian, Lihua You and Jian J. Zhang
National Centre for Computer Animation, Bournemouth University, Bournemouth, U.K.
Keywords: Skin Deformations, Geometric Techniques, Physics-based Techniques, Data-Driven Methods.
Abstract: Achieving realistic skin deformation efficiently is a very important task for character animation. With the
development of skin deformation, the efficiency and effectiveness of character modelling and animation
have been obviously enhanced. In this paper, we survey the recent literature on skin deformation according
to three types of approaches: purely geometric, physics-based, and data driven. Especially we focus on the
work since 2009. We review the problems they primarily tackles, the methodologies they applies, and the
advantages and disadvantages they have. At last, we discuss directions for future research.
1 INTRODUCTION
Achieving realistic skin deformation efficiently is a
very important task for character animation. In order
to create high-quality character models, lots of
skinning deformation algorithms have been
developed. These techniques could be roughly
classified into three categories: purely geometric
techniques, physics-based techniques and data-
driven techniques.
Purely geometric techniques focus on geometric
operations of changing the geometry of character
models instead of underlying physics of skin
deformations. This type of methods are good at
performances in calculating deformed skin models,
but less realistic.
Physics-based methods consider the underlying
physics of skin deformation and materials attributes.
This kind of methods could produce more realistic
skin deformed shapes but commonly need high
computing cost.
Data-driven methods generate new skin
deformations through example character skin
models, without considering any underlying physics.
This category of methods could create highly
realistic skin deformations. The vital problem is how
to reduce input character example models but still
achieve high realistic results.
This paper focuses on recent developments in
skin deformation methods, especially those since
2009. The paper is organized as follows. According
to the three general categories of skin deformation
methods, purely geometric techniques are reviewed
in Section 2. Physics-based techniques are
investigated in Section 3. Data-driven methods are
examined in Sections 4. Finally, conclusions and
future work are discussed in Section 5.
2 GEOMETRIC TECHNIQUES
Due to the exiting problems of unrealistic
deformation created by geometric based methods,
such as the collapsing-joint, candy-wrapper,
bulging-joint and distorted normal, more
explorations have been launched. In this section, we
mainly illustrate five influential algorithms, which
could effectively improve skin deformation shapes
generated geometrically.
2.1 Implicit Skinning with Contact
Modelling
As traditional geometric-based skinning techniques,
linear blending skinning(LBS) (Magnenat-
Thalmann, 1988) or dual-quaternion skinning(DQS)
(Kavan, 2008) are good at performances, which
could meet the need of industry, but the
deformations generated are less realistic, because of
the collapsing-joint and candy-wrapper ( Magnenat-
Thalmann, 1988) and bulging joint and distorted
normal (Kavan, 2008).
Implicit skinning with contact modeling is one
purely geometric method, which could effectively
address skin contact artifacts at joints and muscular
122
Bian S., You L. and Zhang J..
Recent Developments in Skin Deformation for Character Animation.
DOI: 10.5220/0005272001220129
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 122-129
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
bulges in real-time without using time-consuming
collision detection (Vaillant, 2013).
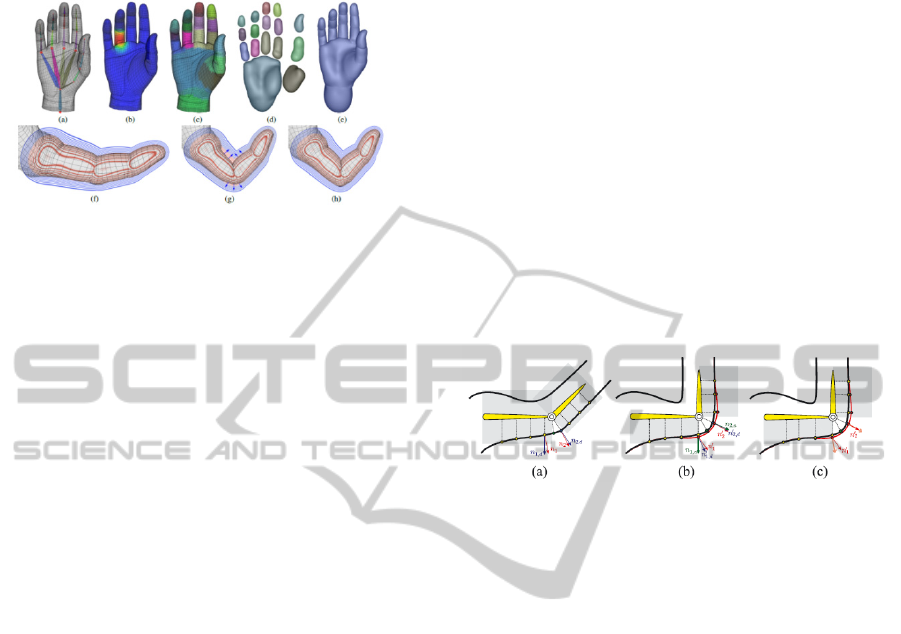
Figure 1: Overview of implicit skinning with contact
modelling (Vaillant, 2013).
An overview of implicit skinning with contact
modeling is demonstrated in Figure (1) by Vaillant
et al. in (Vaillant, 2013). This method uses the initial
settings shown in Figure 1, i. e., a mesh equipped
with an animation skeleton (Figure 1a), the
associated weights (Figure 1b) calculated with the
heat diffusion technique , and mesh segmentation
(Figure 1c) with respect to skeleton bones.
Then, each part of the mesh is approximated
with implicit surfaces computed as 0.5-isosurfaces
of Hermite Radial Basis Functions (HRBFs)
(Wedland, 2005, Maceˆedo, 2011) Figure 1 (d)
through a smooth scalar field
. After these steps,
each vertex v of the mesh stores its current field
value
containing the detailed information. Next, a
single field function is defined from the
combination of the
using either the union (Ricci,
1973), gradient-controlled blending or gradient-
controlled bulge operators (Gourmel, 2013),
depending on the desired result (Figures 1(e,f)).
Following that, underlying field functions
and
object rigid transformations are utilized to get the
deformed mesh. The values of mesh vertices are
iterated through the gradient of (Figure 1(g)) until
they meet the original values or represent a contact
surface. By doing so, the needed object deformation
is created (Figure 1(h)).
The merits of this method include maintaining
the character volume after deformation, generating
contact shapes and bulging near joint without any
optimization and collision, so that the computing
time could be saved.
The demerit of this method is that the deformed
shape quality depends on the option of the initial
geometric skinning method. When the method could
avoid deep self-intersections, the results will be of
high-quality.
2.2 Bulging-Free Dual Quaternion
Skinning
This bulging free dual quaternion skinning method
(Kim, 2014) also considers both the shortage of LBS
in collapsing-joint and candy-wrapper effects, and
the problems of DQS in bulging joint and distorted
normal.
In order to tackle the above mentioned skinning
shortage, the first step, is to concern on correcting
the positions of vertex. It pre-computes every vertex
distance in the rest pose. When the vertex is in the
bone-zone, the distance means to the bone. While
the vertex in the joint-zone, the distance is to the
joint. Then, use the run-time algorithm to correct
vertex positions, pushing the red curve toward the
corresponding bone or joint.
Figure 2: Overview of normals correcting (Kim, 2014).
The second step is to correct the distorted-
normals shown as Figure (2). Firstly, give every
vertex a vector for reference (blue). Then after
deformation, another reference vector n
.
(green) is
rotated from n
.
(blue) by a transform for every
vertex. Finally, use the transform onto n
(thin red),
the thick red vector could be calculated, so that the
distorted normal is corrected. Some unnatural
shading of the deformed skin could be eliminated.
This method mainly uses two procedures to
solve the bulging joint and distorted problems of
DQS. It is simple and easy to implement but the
normal correction algorithm still faces computation
overhead problem.
2.3 Stretchable and Twistable Bones
Skinning
Stretchable and Twistable Bones for Skeletal Shape
Deformation approach (STBS) (Jacobson, 2011)
makes some modifications on the current popular
method, skeleton-based linear blend skinning (LBS),
to tackle the problems on elbow-collapse and candy-
wrapper effects.
This approach could keep the original model
skeleton rig and bone weights after stretching and
twisting deformation, and still maintains a good
performance.
RecentDevelopmentsinSkinDeformationforCharacterAnimation
123

Figure 3: Results comparison of STBS with standard
methods (Jacobson, 2011).
As shown in Figure (3), there is a beast rest pose
model with its skeleton. By using LBS, the user
stretches the neck, and twists and stretches the arm.
It’s obvious that the head and hand got an explosion;
the joint also appears candy-wrapper. Then DQS is
used. The arm twists correctly, but the stretched
artefact is still apparent. Finally, the results of
proposed method STBS shows correct twisting and
no explosions when stretching, due to one extra set
of weights per bone.
The core of STBS is one extra scalar weight
function per bone. This function could be generated
by manual operation or automatic computer
calculations. One approach to define the extra
weights for joint points is to use inverse Euclidean
distance weighting shown by Equation (1),
j
(
p
)
=
()
(1)
Where d
(p) is the Euclidean distance from joint
p to i on the rest position.
STBS aims to expand the possible space of
deformation simply, allow stretching without
explosion and smooth twisting but it cannot avoid
self-collision artefact.
2.4 Differential Blending Deformation
Creating a realistic character model and generating
the diverse poses of the model in computer is
increasingly difficult and time-consuming, generally
because of two reasons. One is the character rig
system may limit the space of achievable poses, and
the other is that manipulating a character rig system
to obtain desirable poses requires huge manual
work, due to lots of the rigging parameters.
The Differential Blending approach (Cengiz
Öztireli, 2013) introduced here, deals with the above
mentioned shortages of skeletal deformation by
using the 2D hand-drawn animation as a guide
(Blair, 1994).
The core of this novel blending method stays in
blending skeletal large and disparate transformations
into small ones. Firstly, represent all transformations
differentially. Then, calculate the averages of these
transformations. Finally, obtain the desirable
blended transformations between animation key-
frames with much lower time and labour cost. The
user draws a stroke to select a bone. Then
transformations from the frames on the drawn curve
to the select bone are computed to get the final
deformed model, shown in Figure (4).
Figure 4: The process of skeletal deformation via
sketching by 2D concepts (Cengiz Öztireli, 2013).
This method takes references from traditional 2D
illustration, to expand the possible poses space, and
could generate models that are difficult by current
3D deformation methods.
2.5 Delta Mush Model
During computer animation, how to define the
efficient rig without undesirable deformation is a
vital problem should be tackled. If the rig is
constructed inefficiently, it will waste much time
and labour cost.
Delta Mush (Mancemicz, 2014) is a Voodoo
deformer, which could smooth arbitrary deformation
of a polygonal mesh and also preserve the valuable
original detail of the character model. “Delta” means
the changes of original models; “Mush” means the
smooth operation.
Figure 5: Overview of Delta Mush algorithm (Mancemicz,
2014).
As shown by Figure (5), the smoothed mesh
(black) is created by “mushed” in cross-section. The
smoothed mesh, the tangent (red) and the normal
(green) compose the local coordinate system. Then a
vector offset (orange) of every initial mesh vertex is
calculated in the local coordinate space, called
“delta” here. Next, the smoothed mesh is
transformed according to the orange offset to create
the final deformed mesh (purple) (Mancemicz,
2014).
Standard geometric smoothing techniques based
on discrete Laplacians (Botsch, 2010) unavoidably
lose both the geometry details and the volume on
convex surfaces. The Delta Mush deformer, as a
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
124

low-pass filter, focuses on the geometry deformation
instead of geometry itself (Mancemicz, 2014), could
just decrease these losses of model details and
volume.
3 PHYSICS-BASED
TECHNIQUES
Physics-based techniques play a very important role
in computer modelling and animation currently. This
kind of methods could produce more realistic skin
deformed shapes but commonly need high
computing cost. In this section, we mainly review
four physics algorithms which fairly solve the tough
tasks on deformation of complex heterogeneous
objects and soft materials.
3.1 Sparse Meshless Model
Physics-based methods consider the physics
principles of skin and the material attributes.
Because of the complex heterogeneous material of
real objects, common methods often regard it into
one homogeneous material for modelling. Once
taking use of current method for modelling the
complex heterogeneous objects realistically, it needs
to deal with lots of varying material parameters
which seems unfeasible previously.
The Sparse Meshless model (Faure, 2011) of
complex deformable solids deals with above
questions using various stiffnesses to simulate
complex heterogeneous objects. By maintaining the
frame-based meshless framework introduced in
(Gilles, 2011), this method obtains the physical
realism of character animation by using skeleton
subspace deformation (SSD) on character volume
and continuum mechanics.
Figure 6: Overview of Sparse Meshless model (Faure,
2011).
The T-bone steak depicted in Figure 6(a) is
composed by complex heterogeneous materials, the
rigid bone, muscle and fat. Figure 6(b) is the volume
stiffness map of it. As Figure 6(c) reveals, the
proposed method could simulate it by only three
moving frames and ten integrating points. And user
creates the placement of frame by a new
compliance-scaled distance Figure 6(d). The
deformed result could be seen in Figure 6(e). When
one force is projected on right, the meat rigid
structure is preserved and the other different material
also moved correspondingly.
Compared with previous approaches, this model
adapts coarse deformation functions to efficiently
simulate objects of complex heterogeneous material
at a high performance and less control nodes but the
accuracy should be improved.
3.2 Efficient Elasticity Technique
As for the high computational cost of physically
based approach to generate the life-like human and
animal models, geometric or data-driven skinning
approaches are always used. But in that case, the
pinch-free geometry could not be preserved.
Therefore, some previous works have been done to
simplify the physical simulation. The principle
component analysis of off-line elasticity simulation
(Kry, 2002) is use to enhance the interaction of
physics-based SSD.
The novel elasticity model introduced in
(McAdams, 2011) focuses on solving the soft tissue
deformation problems. It innovatively discretizes co-
rotational elasticity over a hexahedral lattice to
diminish the self-collision artifacts and maintains
soft-constraints for character realism.
Figure 7: Overview of the efficient elasticity model
(McAdams, 2011).
As shown in Figure 7, there’s a character mesh
and its skeleton (left). Then a corresponding
hexahedral lattice is defined (middle). The original
mesh is deformed by the rules of self-collision and
volumetric elasticity.
Taking a reference on (Chao, 2010), this
corotational elasticity discretization method
accurately treats the force into derivatives to get a
more robust solver than the simplified warped-
stiffness approaches with little manual cost.
RecentDevelopmentsinSkinDeformationforCharacterAnimation
125

3.3 Skeleton and Skin Coupled Physics
Framework
Recently some outcomes promote the controlling of
human-like rigid characters (Yin, 2007, Coros,
2010) and highly dynamic motions (Liu, 2012,
Brown, 2013). But sometimes the motions of
character skin and soft body always influence the
dynamic of skeleton. In the long run, biomechanical
algorithms that truly simulate human anatomy are
exactly necessary to avoid the problem (Lee, 2009),
unfortunately still need high computing cost.
Here, this physically based framework for
simulating and controlling life-like soft material
characters could couples the dynamics of skeleton
and soft body (Liu, 2013). In detail, this simulation
and control system works as shown in Figure 9:
(1) Take the character skeleton and surface mesh
as input data.
(2) In order to couple the skeleton dynamic and
skin geometry, user should construct one coarse
volumetric mesh with a reference configuration X.
More exactly, one soft body dynamics solver is
obtained to construct the volumetric mesh. And a
rigid body dynamics solver is obtained to simulate
the character skeleton.
By coupling the dynamics of skeleton and skin,
this physics-based framework shows good
performance on character large deformation and
joint effects.
3.4 Embedded Thin Shells Wrinkle
Deformation
Wrinkles simulation takes a very important part in
object deformation. When the material properties of
the surface and underlying volume change, wrinkles
will happen, causing by a force. The wrinkle
appearances commonly occur on human skin
(Danielson, 1973), but also could appear at other
kinds of objects, like fruits and mountain (Genzer,
2006).
The embedded thin shells framework showed in
(Remillard, 2013) could highly simulate complex
object with a soft interior and a harder skin. The core
of it is to combine high resolution thin shells with
coarse finite element lattices and confirm frequency
based constraints. And it could generate the
predicted wrinkle by calculating the physical
parameters of characters.
This method also adapts one novel two-way
coupled model to eliminate the computational cost
of internal volumetric elements (Remillard, 2013).
To elaborate, this technique has the following
phases:
(1) Taking use of the embedded mesh method
and replaces the embedded mesh with a thin shell,
combining both systems just with position
constraints.
(2) Considering the constraints. They should be
non-intervention with wrinkle formation or large
character deformation.
(3) C1 quadratic shape functions to represent the
interior deformations, achieving seamless effect on
discretization boundaries.
This solver produces static solutions for the
shell. These shells are thin enough and cannot cause
visual dynamics. The high-resolution deformation of
these shells could be used to contribute forcing on
the low-resolution interior dynamics (Remillard,
2013). Thus, the process could largely eliminate the
cost of deforming the interior of objects.
4 DATA-DRIVEN METHODS
Data-driven methods generate new skin
deformations through example character skin
models, without considering any underlying physics.
Once example models are sufficient, this category of
methods could create highly realistic skin
deformations. Here, we describe four data-driven
algorithms developed for decreasing the input
character example data but still could accomplish
high realistic results.
4.1 Smooth Skinning Decomposition
Figure 8: Overview of this skinning decomposition
method. B means rigid bone transformations and W means
a sparse, convex bone-vertex weight map W (Le, 2012).
Smooth Skinning Decomposition with Rigid
Bones (SSDR), is one effective approach that
automatically extract linear blend skinning (LBS)
from input example models. As shown in Figure 11,
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
126

a set of example models are decomposed into bone
transformations and a sparse, convex bone-vertex
weight map. Only these little rigid bones and the
weight map are used to simulate the skin
deformations of character models by SSDR (Le,
2012). More specifically, this skinning
decomposition is solved as one constrained
optimization problem. The summation of squared
error of vertices on models deformed using LBS has
to be least. Shown as follows:
,,
=
∑∑
−
∑
(
+
)
||
||
||
,,
(2)
Where w
is the influence of bone j to vertex i,
p
is the coordinates of vertex i at the rest pose, |B|
means bones’ number, and R
and T
are bone j ’s
rotation and translation matrix ontstage.
The skinning methods in (James, 2005) and
(Hasler, 2010) make a novel treatment called soft
constraints which are the constraint of bone
orthogonal transformation and bone-vertex convex
weight map. But this SSDR technique treats these
constraints as hard constraints to avoid the collision
between totally satisfying the constraints and
minimizing the reconstructing error. By employing
the SSDR model, the bone transformation could be
obtained simply and the deformed shapes are
accurate but it needs high computational cost.
4.2 Enriching Coarse Interactive
Deformation
Simulating elastic object is really necessary in
character modeling area. Many efficient
approximate deformation method have been
developed, but they always cannot do good on
simulating complex geometric models with
nonlinear materials and dissatisfied computing cost.
Considering on the aforementioned problems,
the enriching coarse method follows the idea that,
the non-linearly deformation of geometric object
could be decomposed as a superposition of an
approximate model and displacements on deviation
between approximate model and real geometric
model (Zhong, 2005). It proposes one efficient
dynamic interactive coarse model coupled with
enriching details form a high-resolution quasi-static
model in a data-driven way (Seiler, 2012).
The first stage of this algorithm is the pre-
computation. During this stage, there’s an interactive
tool which could be used to act on the object and
create object deformation. The aforementioned
procedure acts again but with higher resolution
quasi-static simulation. After every example
interaction, the difference between the two models is
calculated as a displacement field for next time’s
use, called stamp in this method.
The second stage of this algorithm is to obtain
the approximated character deformation model by
coarse simulating. And weight () is extracted to
blend the stamps using non-linear correlation. Then
according to the coarse model of object and the
blended stamp, the high resolution model with
enriching details could be produced (Seiler, 2012).
This approach proposes the stamping way to
enhance the quality of interpolation for simulating
elastic object with details. But the usage direction on
dynamic deformation should still be exploded.
4.3 Sparse Localized Components
Deformation
This Sparse Localized deformation method
decomposes a whole model deformation into some
sparse and spatially localized modes through an
animated sequence (Neumann, 2013).
Figure 9: decomposed sparse and local deformations
(blue) could be added to create a new deformation needed
(Neumann, 2013).
As shown in Figure 9, summing several
deformations of localized components produces one
new facial expression. Separate motion effects have
been produced automatically, like eyebrow showed
in the figure.
Firstly, a sparsity-inducing regularizer is edited
for mesh deformation setting. Then design one
mechanism to automatically decompose sparse and
localized mesh components efficiently which could
be guided by input data from user. Besides, one
effective decomposition optimization way has also
been developed.
Based on the important theories on matrix
decomposition such as Non-Negative Matrix
Factorization (NMF) (Lee, 2000), Robust PCA
(Candes, 2011), and Sparse PCA (Zou, 2006), this
new efficient data-driven algorithm could
decompose mesh sequence into sparse deformation
components without considering the real underlying
physical movements.
The sparse localized decomposition method
highly deals with some tough mesh processing and
RecentDevelopmentsinSkinDeformationforCharacterAnimation
127

editing tasks, such as animation editing on faces,
body, cloth and statistical geometry processing.
4.4 Non-Linear Heterogeneous Soft
Tissue Deformation
Recently, the methods on simulating soft object
deformation have been developed to solve the
heterogeneous materials problem. But it exactly is
still a time-consuming work and another tough
problem is material nonlinearities.
This data-driven method proposes one novel way
to simulate the deformations of non-linear
heterogeneous soft object. Finite element methods
and a range of measured example objects
deformation have been used, saving lots cost of
choosing material parameters (Bickel, 2009). As
always, a four stage process applies:
(1) Every measured example deformation of
objects is transformed into a local element-wise
strain space.
(2) Model the stress-strain relation of material
deformation into locally linear sample.
(3) Through radial basis functions (RBFs)
(Buhmann, 2003), interpolate and simulate the non-
linear deformation of material in strain space.
(4) Finally, by using an easy-to-implement
elastostatic finite-element solution of the non-linear
material examples based on incremental loading, the
accurate soft object deformation models could be
generated on lower computation cost (Bickel, 2009).
Figure 10: Overview of this novel method on representing
the soft tissue deformation (Bickel, 2009).
As shown in Figure 10, put a force on different
positions of the object, user could get a set of
example deformations. And the direction and
magnitude of forces used should be stored and
processed. Based on the abovementioned
deformation and force, users estimate its stress-strain
relationship and create a space composed with these
samples. After that, when a new force is set, the
deformation needed could be interpolated by RBFs
on the basis of these examples in strain space.
The major advantage of this method is the
capability to generate new deformation of complex
heterogeneous soft object simply, regardless of
tough material parameters setting. But this method
only processes the force on the probes’ shaft
direction. To be realistic, the tangential forces and
frictions should also be considered in future work.
5 CONCLUSIONS
In this paper, we mainly make a survey upon the
latest developments of skin deformation techniques,
especially since the year of 2009. According to the
review and comparisons on these latest and
contributable methods, we have known that the
unrealistic problems of geometric-based deformation
have been greatly tackled while still maintaining
good performances. The difficulties of physics-
based techniques, such as deformation of complex
heterogeneous objects and soft materials, have been
addressed to avoid high computing cost. Besides, the
vital need of reducing input example models on
data-driven algorithm has also been substantially
processed. Every approach has their own merits,
their intrinsic attributes still appears some demerits
accordingly.
Thus, it’s still necessary to develop more
effective combination operations which could
remedy the shortages of each kind of methods;
highly maintain the character details during
deforming and avoid unnecessary calculations.
The first possible combination operation may be
a hybrid technique which combines the deformation
mechanics of skin surfaces with data-driven
approaches to reduce example skin shapes and
achieve good realism.
The second possible combination operation is to
first transform skin surface models into a wireframe
representation, and introduce deformation mechanics
of wires and data-driven approaches to create
realistic skin deformations efficiently.
ACKNOWLEDGEMENTS
This research is supported by the grant of 2013
International Exchanges Scheme (Grant no.
IE131367), the Royal Society, United Kingdom.
REFERENCES
Magnenat-Thalmann, N., Laperrière, R., Thalmann, D.,
1988. Joint-dependent local deformations for
handanimation and object grasping, In Proceedings on
Graphics interface’88.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
128

Kavan, L., Collins, S., ˇZ´ara, J., O’Sullivan, C., 2008.
Geometric skinning with approximate dual quaternion
blending, ACM Transactions on Graphics.
Vaillant, R., Barthe, L.,2013. Implicit Skinning: Real-
Time Skin Deformation with Contact Modeling, ACM
Transactions on Graphics.
Wedland, H., 2005. Scattered Data Approximation,
CambridgeUniversity Press.
Maceˆedo , I., Gois, J. P., Velho, L., 2011. Hermite
radialbasis functions implicits. Computer Graphics
Forum.
Ricci, A., 1973. Constructive Geometry for Computer
Graphics, Computer journal.
Gourmel, O., Barthe, L., Cani, M.-P., Wyvill, B.,
Bernhardt, A., Paulin, M., Grasberger, H., 2013. A
gradient-based implicit blend, ACM Transactions on
Graphics.
Kim, Y. B., Han, J. H., 2014. Bulging-free dual quaternion
skinning, Computer Animation and Virtual Worlds.
Jacobson, A., Sorkine, O., 2011. Stretchable and Twistable
Bones for Skeletal Shape Deformation, ACM
Transactions on Graphics (SIGGRAPH Asia).
Cengiz Öztireli, A., Baran, I., Popa, T., Dalstein, B.,
Sumner, R. W., Gross, M., 2013. Differential Blending
for Expressive Sketch-Based Posing, Proceedings of
the 12th ACM SIGGRAPH / Eurographics Symposium
on Computer Animation.
Blair, P., 1994. Cartoon Animation, Walter Foster
Publishing.
Mancemicz, J., Derksen, M. L., Wilson, C. A., 2014. Delta
Mush: Smoothing Deformations While Preserving
Detail, ACM SIGGRAPH.
Botsch, M., Kobbelt, L., Pauly, M., Alliez, P., L´evy, B.,
2010. Polygon mesh processing, CRC press.
Faure, F., Gilles, B., Bousquet, G., Pai, D. K., 2011.
Sparse meshless models of complex deformable
solids, Proceedings of ACM SIGGRAPH.
Gilles, B., Bousquet, G., Faure, F., Pai, D., 2011. Frame-
based elastic models, ACM Transactions on Graphics.
Kry, P., James, D., Pai, D., 2002. Eigenskin: real time
large deformation character skinning in hardware, In
Proc. ACM SIGGRAPH/ Eurographics Symp.
McAdams, A., Zhu, Y., Selle, S., Empey, M., Tamstorf,
R., Teran, J., Sifakis, E., 2011. Efficient elasticity for
character skinning with contact and collisions,
Proceedings of ACM SIGGRAPH.
Chao, I., Pinkall, U., Sanan, P., Schr¨Oder, P., 2010. A
simple geometric model for elastic deformations, ACM
Transactions on Graphics, (SIGGRAPH proceedings).
Yin, K., Loken, K., Panne, M. V. D., 2007. SIMBICON:
Simple biped locomotion control, ACM Transactions
on Graphics (SIGGRAPH).
Coros, S., Beaudoin, P., Panne, M. V. D., 2010.
Generalized biped walking control, ACM Transactions
on Graphics (SIGGRAPH).
Liu, L., Yin, K., Panne, M. V. D., Guo, B., 2012. Terrain
runner: control, parameterization, composition, and
planning for highly dynamic motions, Proceedings of
ACM SIGGRAPH Asia.
Brown, D. F., Macchietto, A., Yin, K., Zordan. V., 2013.
Control of rotational dynamics for ground behaviors,
Proceedings of the 12th ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation.
Lee, S.-H., Sifakis, E., Terzopoulos, D., 2009.
Comprehensive biomechanical modeling and
simulation of the upper body, ACM Transactions on
Graphics.
Liu, L., Yin, K., Wang, B., Guo, B., 2013. Simulation and
Control of Skeleton-driven Soft Body Characters,
ACM Transactions on Graphics.
Danielson, D., 1973. Human skin as an elastic membrane,
Journal of Biomechanics.
Genzer, J., Groenewold, J., 2006. Soft matter with hard
skin: From skin wrinkles to templating and material
characterization, Soft Matter.
Remillard, O., Kry, P. G., 2013. Embedded Thin Shells for
Wrinkle Simulation, ACM Transactions on Graphics
(SIGGRAPH 2013 Conference Proceedings).
Le, B. H., Deng, Z., 2012. Smooth Skinning
Decomposition with Rigid Bones, Proceedings of
ACM SIGGRAPH Asia.
James, D. L., Twigg, C. D., 2005. Skinning mesh
animations, ACM Transactions on Graphics.
Hasler, N., Thorm¨a Hlen, T., Rosenhahn, B., Seidel, H.-
P., 2010. Learning skeletons for shape and pose, In
I3D’10: Proc. of SIGGRAPH Symp. on Interactive 3D
Graphics and Games.
Zhong, H., Wachowiak, M., Peters, T., 2005. A real time
finite element based tissue simulation method
incorporating nonlinear elastic behaviour, Computer
Methods in Biomechanics and Biomedical
Engineering.
Seiler, M., Spillmann, J., Harders, M., 2012. Enriching
Coarse Interactive Elastic Objects with High-
Resolution Data-Driven Deformations, Proceedings of
the ACM SIGGRAPH/Eurographics Symposium on
Computer Animation.
Neumann, T., Varanasi, K., Wenger, S., Wacker, M.,
Magnor, M., Theobalt, C., 2013. Sparse Localized
Deformation Components, ACM Transactions on
Graphics.
Lee, D. D., Seung, H. S., 2000.Algorithms for Non-
negative Matrix Factorization, Advances in Neural
Information Processing Systems.
Candes, E. J., Li, X., Ma, Y., Wright, J., 2011. Robust
Principal Component Analysis, Journal of the ACM.
Zou, H., Hastie, T., Tibshirani, R., 2006. Sparse Principal
Component Analysis,
Journal of Computational and
Graphical Statistics.
Buhmann, M. D., 2003. Radial Basis Functions: Theory
and Implementations, Cambridge University Press.
Bickel, B., Bacher, M., Otaduy, M. A., Matusik, W.,
Pfister, H., Gross, M., 2009. Capture and Modeling of
Non-Linear Heterogeneous Soft Tissue, Proceedings
of ACM SIGGRAPH.
RecentDevelopmentsinSkinDeformationforCharacterAnimation
129
