
Interfaces in a Game-theoretic Setting for Controlling the Plasmodium
Motions
Andrew Schumann
1
and Krzysztof Pancerz
1,2
1
University of Information Technology and Management in Rzeszow, Sucharskiego 2, 35-225 Rzeszow, Poland
2
University of Management and Administration, Akademicka 4, 22-400 Zamo
´
s
´
c, Poland
Keywords:
Physarum polycephalum, Badhamia utricularis, Bio-inspired Game-theory, Timed Transition System, p-adic
Valued Probability, Knowledge State of Plasmodium, Strategy of Plasmodium, User Interface.
Abstract:
The plasmodium is the large one-cell organism containing a mass of multinucleate protoplasm. It is an active
feeding stage of Physarum polycephalum or Badhamia utricularis and it moves by protoplasmic streaming
which reverses every 30-60 s. In moving, the plasmodium switches its direction or even multiplies in ac-
cordance with different biosignals attracting or repelling its motions, e.g. in accordance with pheromones of
bacterial food, which attract the plasmodium, and high salt concentrations, which repel it. So, the plasmodium
motions can be controlled by different topologies of attractants and repellents so that the plasmodium can be
considered a programmable biological device in the form of a timed transition system, where attractants and
repellents determine the set of all plasmodium transitions. Furthermore, we can define p-adic probabilities
on these transitions and, using them, we can define a knowledge state of plasmodium and its game strategy
in occupying attractants as payoffs for the plasmodium. As a result, we can regard the task of controlling
the plasmodium motions as a game and we can design different interfaces in a game-theoretic setting for the
controllers of plasmodium transitions.
1 INTRODUCTION
Conventionally, the intelligent behavior of animals is
explained by their nervous system that coordinates
voluntary and involuntary actions of animal’s body
and transmits signals between different parts of its
body, which allows animals to act intentionally and
efficiently. There is an approach in artificial intelli-
gence, consisting in building computational models
inspired by these nervous systems, that is called arti-
ficial neural network.
Nevertheless, there are one-cell organisms like
Physarum polycephalum or Badhamia utricularis
1
(supergroup Amoebozoa, phylum Mycetozoa, class
Myxogastria) without any nervous system and they
are able at their plasmodial stage to build complex
networks for solving different tasks: maze-solving
(Nakagaki, Yamada, and Toth, 2000), minimum-risk
path finding (Nakagaki, Yamada, and Toth, 2001),
(Nakagaki et al., 2007), associative learning (Shi-
rakawa, Gunji, and Miyake, 2011), etc. In other
1
References on this new culture are contained in (Neu-
bert et al., 1995)
words, Physarum polycephalum and Badhamia utric-
ularis demonstrate an intelligent behavior with inten-
tionality and efficiency, although they do not have ner-
vous systems at all. In particular, they demonstrate
the ability to memorize and anticipate repeated events
(Saigusa et al., 2008). Furthermore, by means of plas-
modium behavior, it is possible to simulate the behav-
ior of some collectives such as collectives of parasites
(Schumann and Akimova, 2013). Thus, the complex
intelligent behavior of plasmodium is biologically un-
explained still and shows the limits of our understand-
ing what natural intelligence is.
Now, there are many attempts to involve the plas-
modium into semi-electrical devices to obtain a semi-
biological and semi-electrical chip in due course (Sun
et al., 2009), (Tsuda, Aono, and Gunji, 2004), (Tsuda
et al., 2011), (Adamatzky, 2010). The point is that
the plasmodium spread by networks can be pro-
grammable and thereby it may simulate different in-
telligent processes. We are working on this problem,
too (Adamatzky et al., 2012). In this paper, we are
going to present our results in modelling the plasmod-
ium networks as timed transition systems (Section
2). Propagations in these systems can be calculated
338
Schumann A. and Pancerz K..
Interfaces in a Game-theoretic Setting for Controlling the Plasmodium Motions.
DOI: 10.5220/0005285203380343
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2015), pages 338-343
ISBN: 978-989-758-069-7
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
by means of p-adic valued probabilities and fuzzi-
ness (Khrennikov and Schumann, 2006), (Schumann,
2008), (Schumann, 2010), see Section 3. In terms of
these probabilities we can define a knowledge state
of plasmodium and its game strategy in occupying at-
tractants as payoffs for the plasmodium (Section 4).
Hence, we can control the plasmodium motions as a
game (Section 5). As a consequence, user interfaces
for the controllers of plasmodium propagations can
have a natural form of game-theoretic setting.
2 TIMED TRANSITION SYSTEMS
FOR PROGRAMMING THE
PLASMODIUM MOTIONS
The plasmodium is an amorphous yellowish mass
with networks of protoplasmic tubes, programmed by
spatial configurations of attracting and repelling stim-
uli. Any motion of plasmodium proceeds from one
stimuli to others. As a result, we deal with a kind
of natural transition systems with states presented by
attractants and events presented by plasmodium tran-
sitions between attractants. We can distinguish sev-
eral operations (instructions) in the plasmodium net-
works like: add node, remove node, add edge, re-
move edge (Adamatzky, 2010). Adding and remov-
ing nodes can be implemented through activation and
deactivation of attractants, respectively. Adding and
removing edges can be implemented by means of re-
pellents put in proper places in the space. An activated
repellent can avoid a plasmodium transition between
attractants.
Adding and removing edges (in fact, adding and
removing protoplasmic tubes) can change dynami-
cally over time. To model such behavior, we have
proposed to use timed transition systems as a high-
level model of behavior of plasmodium. Let N be a
set of nonnegative integers. Formally, a timed tran-
sition system T T S = hS,E,T,s
0
,l, ui consists of the
non-empty set of states S, the set of events E, the
transition relations T ⊆ S × E × S, the initial state s
0
as well as a minimal delay function (a lower bound)
l : E → N assigning a nonnegative integer to each
event and a maximal delay function (an upper bound)
u : E → N ∪ {∞} assigning a nonnegative integer or
infinity to each event. Usually transition systems are
based on actions which may be viewed as labelled
events. If hs,e,s
0
i ∈ T , then the idea is that T S can
go from s to s
0
as a result of the event e occurring at
s. In timed transition systems, timing constraints re-
strict the times at which events may occur. The timing
constraints are classified into two categories: lower-
bound and upper-bound requirements. A transition
system can be presented as a graph structure with
nodes corresponding to states and edges correspond-
ing to transitions. In case of plasmodium, states repre-
sent attractants whereas edges represent protoplasmic
tubes (plasmodium transitions between attractants).
To program computation tasks for the plas-
modium propagations, we are developing a new
object-oriented programming language (Schumann
and Pancerz, 2013) called the Physarum language,
where the following three basic set descriptions are
defined: (i) T S.State – setting states of plasmodium,
including initial states; (ii) T S.Event – setting events
transiting one states to others; (iii) T S.Transition –
setting transitions of plasmodium. The proposed lan-
guage can be used for developing programs for plas-
modium motions by the spatial configuration of stim-
uli.
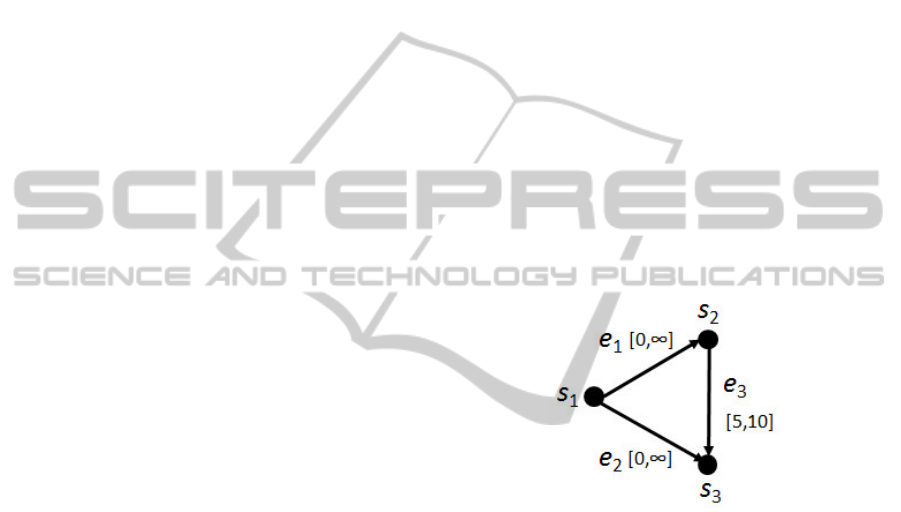
Let us consider a simple timed transition sys-
tem shown as a graph structure in Figure 1 with the
following timing constraints: l(e
1
) = 0, u(e
1
) = ∞,
l(e
2
) = 0, u(e
2
) = ∞, l(e
3
) = 5, u(e
3
) = 10.
Figure 1: An example of timed transition system.
The code in the Physarum language has the fol-
lowing form:
#TRANSITION_SYSTEM s1=new TS.State("s1");
s1.setAsInitial;
s2=new
TS.State("s2");
s3=new TS.State("s3");
e1=new TS.Event("e1");
t1=new TS.Transition(s1,e1,s2);
e2=new TS.Event("e2");
t2=new
TS.Transition(s1,e2,s3);
e3=new
TS.Event("e3");
e3.setTimingConstraints(5,10);
t3=new
TS.Transition(s2,e3,s3);
The default timing constraints are 0 as a lower
bound and ∞ as an upper bound.
As a result of programming the plasmodium tran-
sitions, we obtain spatial configurations of stimuli
InterfacesinaGame-theoreticSettingforControllingthePlasmodiumMotions
339
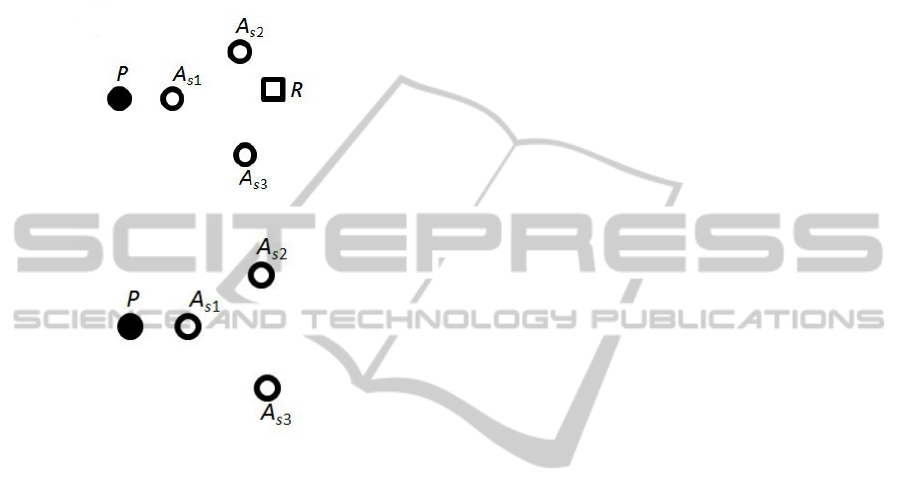
presented in Figure 2: (a) for the time instant t = 4,
(b) for the time instant t = 8, where P is plasmodium,
A
s
1
, A
s
2
, A
s
3
are attractants, and R is a repellent. It is
easy to see that the event e
3
is allowed only if actual
time t ∈ {5, 6, . . . , 10}. Therefore, in the model in Fig-
ure 2(a), a repellent, avoiding the transition between
states s
2
and s
3
as a result of the event e
3
, is present,
i.e. it is activated.
(a)
(b)
Figure 2: Spatial configurations of stimuli for the plasmod-
ium motions.
3 P-ADIC VALUED
PROBABILITIES AND
FUZZINESS
We have supplemented our language with instructions
enabling us to determine (in the simulation stage) pos-
sible properties of experiments in terms of the proba-
bility space:
• setTimeStep – setting a time step from which the
experiment starts, t = 0,1,2,...,n,
• setTimeEnd – setting a time end when the exper-
iment stops, t = 0, 1, 2, . . . , ∞,
• getNeighCard – getting a cardinality number of
neighboring attractants for a given attractant at the
given setTimeStep and setTimeEnd,
• getAccessCard – getting a cardinality number of
attractants accessible for a given attractant by
protoplasmic tubes at the given setTimeStep and
setTimeEnd.
Instructions for the simulation stage are preceded
with $. Let us consider a simple timed transition sys-
tem given earlier.
If we add the following instructions to the code:
$setTimeStep(0);
$setTimeEnd(10);
$getNeighCard(s2);
$getAccessCard(s2);
we obtain the following 3-adic streams:
• 2 2 2 2 2222222 for getting a cardinality number
of neighboring attractants for A
s
2
,
• 2 2 2 2 2211111 for getting a cardinality number
of attractants accessible for A
s
2
.
Thus, if we have p−1 neighbor attractants for A
s
2
,
we deal with p-adic streams. If setTimeStep(0) and
setTimeEnd(∞) we deal with infinite p-adic streams.
All these streams including both finite and infinite can
be identified with p-adic integers. Let us recall that
each p-adic integer has a unique expansion
n = α
0
+ α
1
· p + . . . + α
t
· p
t
+ ... =
∞
∑
t=0
α
t
· p
t
,
where α
t
∈ {0,1,..., p − 1}, ∀t ∈ N. This num-
ber sometimes has the following notation: n =
...α
3
α
2
α
1
α
0
, where α
t
can be interpreted as a value
of α at time step t = 0,1,2,...,∞. We have used
the latter notation in our example. The set of p-adic
integers is denoted by Z
p
. For more details about
p-adic numbers, please see (Koblitz, 1984). Now,
p-adic analysis is used in many applications includ-
ing quantum mechanics (Vladimirov and Volovich,
1989), (Volovich, 1987).
The set Z
p
cannot be linearly ordered, but there
are many possibilities to define a partial ordering re-
lation. For example, we can assume that (i) for any
finite p-adic integers σ,τ ∈ N, we have σ ≤ τ in N
iff σ ≤ τ in Z
p
; (ii) each finite p-adic integer n =
...α
3
α
2
α
1
α
0
(i.e. such that α
i
= 0 for any i > j) is
less than any infinite number τ, i.e. σ < τ for any
σ ∈ N and τ ∈ Z
p
\ N; (iii) each infinite p-adic in-
teger σ is less, than p-adic integer τ iff σ
t
≤ τ
t
for
all t = 0, 1, 2, . . . Let us denote this ordering rela-
tion by O
Z
p
. We can see that there exist p-adic inte-
gers, which are incompatible by O
Z
p
. For example,
let p = 2 and let σ represents the p-adic integer −1/3
= . . . 10101. . . 101 and τ the p-adic integer −2/3 =
. . . 01010. . . 010. Then the p-adic streams σ and τ
are incompatible. Now we can define sup and inf
digit by digit. Then if σ ≤ τ, so in f (σ,τ) = σ and
sup(σ,τ) = τ. The greatest p-adic integer according
to our definition is −1 = ...xxxxxx, where x = p − 1,
and the smallest is 0 = . . . 00000.
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
340

Let us define the Boolean operations on attractants
A
s
i
, A
s
j
, . . . so that
getNeighCard(si ∩ s j) :=
in f (getNeighCard(si),getNeighCard(s j);
getAccessCard(si ∩ s j) :=
in f (getAccessCard(si),getAccessCard(s j);
getNeighCard(si ∪ s j) :=
sup(getNeighCard(si),getNeighCard(s j);
getAccessCard(si ∪ s j)
:= in f (getAccessCard(si),getAccessCard(s j);
getNeighCard(¬si) := −1 − getNeighCard(si);
getAccessCard(¬si) := −1 − getAccessCard(si).
Let Ω
∗
denote all attractants both activated and de-
activated at each t = 0,1,2,...,∞. It is a union of all
attractants A
s
i
, A
s
j
, . . . at each time step. Its subsets
will be denoted by A
∗
,B
∗
⊆ Ω
∗
.
Let us define p-adic fuzziness as follows: a p-adic
fuzzy measure is a set function F
Z
p
(·) defined for sets
A
∗
,B
∗
⊆ Ω
∗
, it runs over the set Z
p
and satisfies the
following properties:
• F
Z
p
(Ω
∗
) = −1 and F
Z
p
(
/
0
∗
) = 0.
• If A
∗
⊆ Ω
∗
and B
∗
⊆ Ω
∗
are disjoint, i.e. inf(F
Z
p
(A
∗
), F
Z
p
(B
∗
)) = 0, then F
Z
p
(A
∗
∪ B
∗
)= F
Z
p
(A
∗
)
+ F
Z
p
(B
∗
). Otherwise, F
Z
p
(A
∗
∪ B
∗
)= F
Z
p
(A
∗
) +
F
Z
p
(B
∗
) − inf(F
Z
p
(A
∗
), F
Z
p
(B
∗
)) = sup(F
Z
p
(A
∗
),
F
Z
p
(B
∗
)).
• If A
∗
,B
∗
⊆ Ω
∗
, then F
Z
p
(A
∗
∩ B
∗
) = in f (F
Z
p
(A
∗
),
F
Z
p
(B
∗
)).
• F
Z
p
(¬A
∗
) = −1 − F
Z
p
(A
∗
) for all A
∗
⊆ Ω
∗
, where
¬A
∗
= Ω
∗
\ A
∗
.
A p-adic probability measure is a set function
P
Z
p
(·) defined for sets A
∗
,B
∗
⊆ Ω
∗
thus:
• P
Z
p
(A
∗
) = −F
Z
p
(A
∗
) ∈ Z
p
• P
Z
p
(A
∗
|
B
∗
) ∈ Q
p
is characterized by the follow-
ing constraint:
P
Z
p
(A
∗
|
B
∗
) =
P
Z
p
(A
∗
∩B
∗
)
P
Z
p
(B
∗
)
=
F
Z
p
(A
∗
∩B
∗
)
F
Z
p
(B
∗
)
,
where P
Z
p
(B
∗
) 6= 0, P
Z
p
(A
∗
∩ B
∗
) = inf(P
Z
p
(A
∗
),
P
Z
p
(B
∗
)).
The measure P
Z
p
(·) runs over the set Q
p
of all p-
adic numbers (not only integers). Notice that while
Z
p
is the ring of p-adic integers, Q
p
is the field of
p-adic numbers.
4 STATES OF KNOWLEDGE AND
STRATEGIES OF
PLASMODIUM
Using p-adic valued fuzziness and probabilities, we
can define games of plasmodia. So, in the given topol-
ogy of attractants, active zones of plasmodia (initial
states) can be considered players. Suppose, we have
a set of N players, call them i = 1, . . . , N. Agent i’s
knowledge structure is a function P
i
which assigns to
each attractant ω ∈ Ω
∗
a non-empty subset of Ω
∗
, so
that each thing ω belongs to one or more elements
of each P
i
, i.e. Ω
∗
is contained in a union of P
i
, but
P
i
are not mutually disjoint. Then P
i
(ω) is called i’s
knowledge state at the attractant ω. This means that
if the actual state is ω, the individual only knows that
the actual state is in P
i
(ω).
We can interpret P
i
(ω) probabilistically as fol-
lows: P
i
(ω) = {ω
0
: P
i
Z
p
(ω
0
|ω) > 0}. Evidently that
P
i
Z
p
(ω|ω) > 0 for all ω ∈ Ω
∗
, therefore for all ω ∈ Ω
∗
,
ω ∈ P
i
(ω).
Now we consider the relation A
∗
⊆ P
i
(ω), where
A
∗
⊆ Ω
∗
, as the statement that at ω agent i accepts the
performance A
∗
:
K
i
A
∗
= {ω : A
∗
⊆ P
i
(ω)}.
Let B
∗
i
mean ‘Attractants, which can be occupied
by agent i’. After several steps, we expect fusions of
all protoplasmic tubes so that all attractants are occu-
pying by all agents. Does it mean that we observe a
union of B
∗
i
? No, it does not. We face just the situ-
ation that since a time step t = k the sets B
∗
i
are in-
tersected. Let C
∗
i
mean ‘Attractants accessible for the
attractant N
i
by protoplasmic tubes’. Assume, ω ∈ B
∗
i
and ω
0
∈ C
∗
i
. Evidently, P
i
Z
p
(ω
0
|ω) > 0. As a conse-
quence, we assume according to our definitions that
each agent i knows ω at ω
0
and knows ω
0
at ω, i.e.
agent i accepts the performance B
∗
i
at ω
0
and i accepts
the performance C
∗
i
at ω.
Let getAccessSet(i,k) be a set of all at-
tractants such that i knows about them at the
given setTimeStep(t
0
) and setTimeEnd(t
k
). A
strategy of a player i is a mapping strat
i,k
:
getAccessSet(i,k) → Ω
∗
such that for any history
knowledge getAccessSet(i,k) it is true that strat
i,k
be-
longs to the set of attractants accessible at k.
InterfacesinaGame-theoreticSettingforControllingthePlasmodiumMotions
341
5 GAME-THEORETIC
INTERFACES FOR
PLASMODIUM
It is known due to the experiments performed by An-
drew Adamatsky and Martin Grube that if there are
only two agents of the plasmodium game, where the
first agent is presented by a usual Physarum poly-
cephalum plasmodium and the second agent by its
modification called a Badhamia utricularis plasmod-
ium, then both start to compete with each other.
In particular, the Physarum polycephalum plasmod-
ium grows faster and could grow into branches of
Badhamia utricularis, while the Badhamia utricu-
laris plasmodium could grow over Physarum poly-
cephalum veins. So, we face an interesting form of
zero-sum games.
The user interface for this game is designed on the
basis of the following game steps:
• first, the system of Physarum language generates
locations of attractants and repellents;
• second, we can chose n plasmodia/agents of
Physarum polycephalum and m plasmodia/agents
of Badhamia utricularis;
• third, we obtain the task, for example to reach as
many as possible attractants or to construct the
longest path consisting of occupied attractants,
etc.;
• fourth, we can chose initial points for Physarum
polycephalum transitions and initial points for
Badhamia utricularis transitions;
• fifth, we start to move step by step;
• sixth, we define who wins, either Physarum poly-
cephalum or Badhamia utricularis.
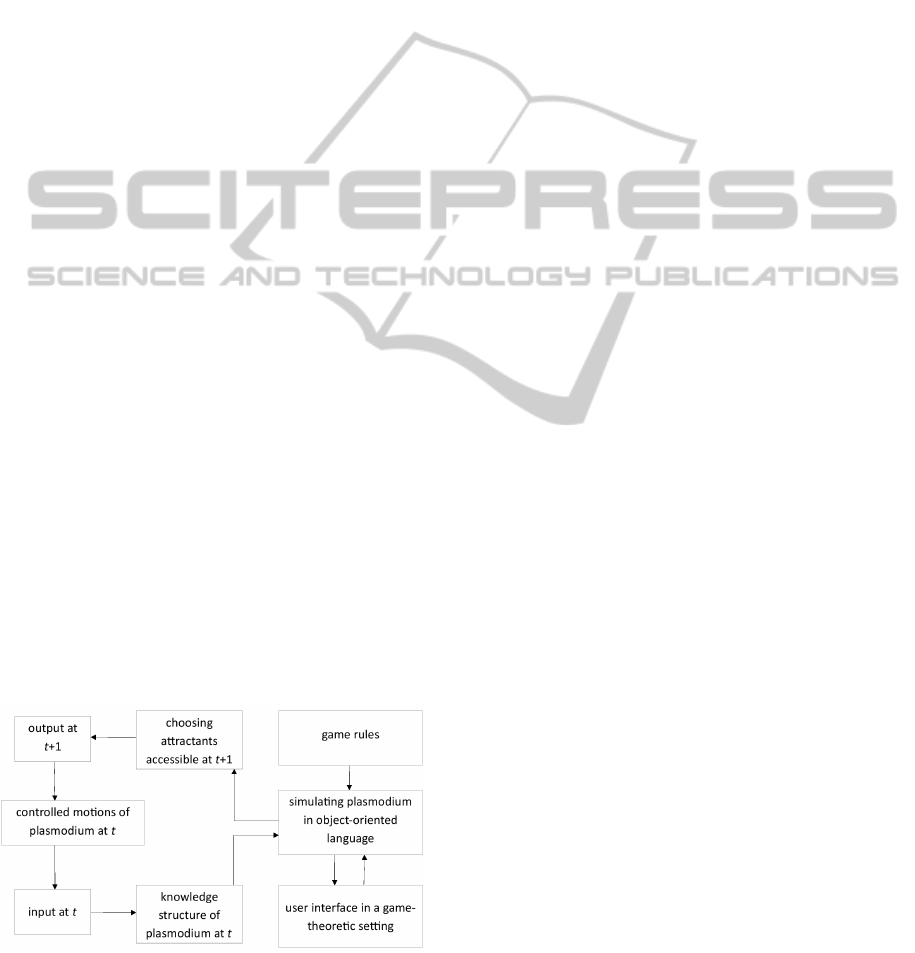
Thus, the plasmodium game has the form of cycle
of Figure 3.
Figure 3: The operative cycle of game-theoretic controller
of plasmodium motions.
In this game, we have two players (the first plays
for the Physarum polycephalum plasmodia, the sec-
ond for the Badhamia utricularis plasmodia). The
system places attractants and repellents automatically.
Then the players choose which attractants are occu-
pied before the game and which rules of the game
hold (to reach as many as possible attractants or to
construct the longest path consisting of occupied at-
tractants, etc.). Then the system shows who wins and
who loses.
6 CONCLUSION
The plasmodium motion is an intelligent way of con-
structing expanding networks for solving complex
tasks. This motion has the form of transitions deter-
mined by locations of attractants and repellents. On
these transitions, it is possible to define p-adic proba-
bilities which are used for defining a knowledge state
of plasmodium and its game strategy in occupying
attractants as payoffs for the plasmodium. Conse-
quently, the task of controlling the plasmodium mo-
tions is considered a game.
ACKNOWLEDGMENT
This research is supported by FP7-ICT-2011-8.
REFERENCES
Abramsky, S., P.-A. Mellies. 1999. “Concurrent Games and
Full Completeness.” Proceedings of the 14th Sympo-
sium on Logic in Computer Science, 431–442.
Adamatzky, A. 2010. Physarum Machines: Computers
from Slime Mould (World Scientific Series on Non-
linear Science, Series A). World Scientific Publishing
Company.
Adamatzky, A., V. Erokhin, M. Grube, Th. Schubert, A.
Schumann. 2012. “Physarum Chip Project: Growing
Computers From Slime Mould.” Int. J. of Unconven-
tional Computing 8(4): 319–323.
Khrennikov, A., A. Schumann. 2006. “Logical Approach to
p-adic Probabilities.” Bulletin of the Section of Logic
35(1): 49–57.
Khrennikov, A., A. Schumann. 2009. “p-Adic Physics,
Non-well-Founded Reality and Unconventional Com-
puting.” P-Adic Numbers, Ultrametric Analysis, and
Applications 1(4): 297–306.
Koblitz, N. 1984. p-adic numbers, p-adic analysis and zeta
functions. Second edition., Springer-Verlag.
Nakagaki, T., H. Yamada, A. Toth. 2000. “Maze-solving by
an amoeboid organism.” Nature 407: 470–470.
BIOSIGNALS2015-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
342

Nakagaki, T., H. Yamada, and A. Toth. 2001. “Path find-
ing by tube morphogenesis in an amoeboid organism.”
Biophysical Chemistry 92: 47–52.
Nakagaki, T., M. Iima, T. Ueda, Y. Nishiura, T. Saigusa, A.
Tero, R. Kobayashi, K. Showalter. 2007. “Minimum-
risk path finding by an adaptive amoeba network.”
Physical Review Letters 99: 68–104.
Neubert, H., W. Nowotny, K. Baumann, H. Marx. 1995.
Die Myxomyceten Deutschlands und des angrenzen-
den Alpenraumes unter besonderer Ber
¨
ucksichtigung
¨
Osterreichs. Bd. 2, Karlheinz Baumann Verlag, Go-
maringen.
Saigusa, T., A. Tero, T. Nakagaki, Y. Kuramoto. 2008.
“Amoebae Anticipate Periodic Events.” Phys. Rev.
Lett. 100(1): 018101.
Shirakawa, T., Y.-P. Gunji, and Y. Miyake. 2011. “An asso-
ciative learning experiment using the plasmodium of
Physarum polycephalum.” Nano Communication Net-
works 2: 99–105.
Schumann, A. 2008. “Non-Archimedean Fuzzy and Prob-
ability Logic.” J. of Applied Non-Classical Logics
18(1): 29–48.
Schumann, A. 2010. “Non-Archimedean Valued Extension
of Logic LΠ and p-Adic Valued Extension of Logic
BL.” J. of Uncertain Systems 4(2): 99–115.
Schumann, A., L. Akimova. 2013. “Simulating of
Schistosomatidae (Trematoda: Digenea) Behavior by
Physarum Spatial Logic.” Annals of Computer Science
and Information Systems, Volume 1. Proceedings of
the 2013 Federated Conference on Computer Science
and Information Systems. IEEE Xplore, 225–230.
Schumann, A., K. Pancerz. 2013. “Towards an Object-
Oriented Programming Language for Physarum Poly-
cephalum Computing.” In Proceedings of the Work-
shop on Concurrency, Specification and Programming
(CS&P’2013). Edited by M. Szczuka, L. Czaja, M.
Kacprzak. Warsaw, 389–397.
Sun, T., S. Tsuda, K.-P. Zauner, H. Morgan. 2009. “Single
cell imaging using electrical impedance tomography.”
In NEMS ’09: Proc. of the 2009 4th IEEE Int. Conf,
on Nano/Micro Engineered and Molecular Systems,
858–863.
Tsuda, S., M. Aono, and Y.P. Gunji. 2004. “Robust and
emergent Physarum-computing.” BioSystems 73: 45–
55.
Tsuda, S., J. Jones, A. Adamatzky, J. Mills. 2011. “Routing
Physarum with electrical flow/current.” Int. J. Nan-
otechnology and Molecular Comput.
Vladimirov, V. S., I. V. Volovich. 1989. “p-Adic Quantum
Mechanics,” Commun. Math. Phys. 123: 659–676.
Volovich, I.V. 1987. “Number theory as the ultimate the-
ory.” CERN preprint, CERN-TH.4791/87.
InterfacesinaGame-theoreticSettingforControllingthePlasmodiumMotions
343
