Shape Classification based on Skeleton-branch Distances
Salih Arda Boluk and M. Fatih Demirci
Computer Engineering Department, TOBB University of Economics and Technology, Ankara, Turkey
Keywords:
Shape Retrieval, Shape Matching, Medial Axis Graph, Earth Mover’s Distance.
Abstract:
In recent decades, the need for efficient and effective image search from large databases has increased. In
this paper, we present a novel shape matching framework based on structures that are likely to exist in similar
shapes. After representing shapes as medial axis graphs, where vertices show skeletons and edges connect
nearby skeletons, we determine the branches connecting or representing shape’s different parts. Using the
shortest path distance from each vertex (skeleton) to each of the branches, we effectively retrieve similar
shapes tothe given query through a transportation-based distance function. A set of shape retrieval experiments
including the comparison with two previous approaches demonstrate the proposed algorithm’s effectiveness
and perturbation experiments present its robustness.
1 INTRODUCTION
In recent decades, the need for efficient and effective
image search from largedatabases has increased. This
demand is raised within a number of domains such as
content based image retrieval, face recognition, and
bioinformatics. A number of powerful approaches
have been presented in the literature to address the
problem of retrieving database images, which most
resembles the given query. While some of these tech-
niques match the query features with those of each
database image, some uses indexing algorithms to re-
duce the number of candidate database images for
more efficient retrieval.
In order to retrieve similar database images, an im-
age is segmented into different regions and each re-
gion is represented by its distinctive features. Several
image features, such as shape, color, texture, central
moment, eccentricity, and brightness are used in con-
tent based image-retrieval systems (Ardizzone et al.,
1996). Among those, shape is an important visual fea-
ture to describe the image content. In many applica-
tions, the shape of a planar object is described either
by its contour or skeleton.
In our framework, we use a skeleton (or, medial
axis) based shape descriptor. Our motivation for us-
ing skeletons rather than contours is due to the studies
showing that skeleton-based shape similarity descrip-
tors perform better than contour-based ones even in
the case of partial occlusions (Sebastian et al., 2004;
Sebastian and Kimia, 2005). Since skeleton integrates
Figure 1: Sample silhouettes superimposed on their shapes.
both topological and geometrical features (Blum and
Nagel, 1978), it has been used as a powerful shape
descriptor in various applications including charac-
ter recognition, content-based image retrieval, circuit
board inspection, and biomedical imaging. Specif-
ically, the skeleton of a shape forms the centers of
the maximal disks inside the shape boundary, and the
radii of these maximal disks represent the thickness of
an object. Given the radius of such discs associated
which each skeletal point, the object can be recon-
structed exactly. Figure 1 shows two sample skeletons
superimposed on their shapes. Skeleton extraction
methods are highly sensitive to the boundary noise,
yielding spurious skeleton branches. Therefore, many
skeleton pruning approaches have been developed as
we review some of them in the next section.
In this paper, we present a novel shape matching
framework based on structures that are likely to ex-
ist in similar shapes. Specifically, after representing
shapes as medial axis graphs, where vertices show
skeletons and edges connect nearby skeletons, we
determine the branches connecting or representing
353
Boluk S. and Demirci M..
Shape Classification based on Skeleton-branch Distances.
DOI: 10.5220/0005300503530359
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 353-359
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

shape’s different parts. When images of an object
are captured from close viewpoints, similar branch
points are likely to exist in neighboring shapes. Using
the shortest path distance from each vertex (skeleton)
to each of the branches, we effectively retrieve simi-
lar shapes to the given query trough a transportation-
based distance function. Since the position of a skele-
ton changes with respect to shape rotation and scale,
various approaches solve for transformation param-
eters prior to or during the matching. On the other
hand, the shortest path distance we compute in this
paper is invariant under rotation and takes into ac-
count the radius of each skeleton, allowing us to em-
ploy a more powerful shape representation.
Our idea for representing a skeleton using its dis-
tance from each of the branches, which are likely
to exist in similar shapes, is motivated by the work
of Vleugels and Veltkamp (Vleugels and Veltkamp,
2002). Assuming that the similarity between a pair
of shapes can be computed using a metric distance
function, the authors show that their resemblance can
be computed by finding their distances from a third
shape. Specifically, the distance from each database
image to a set of n predetermined what is called van-
tage objects is computed. This step represents an im-
age as a point in the n-dimensional vantage space.
The database images that are similar to the vantage
objects and similar to each other are determined by
their position in the vantage space. Applying the same
idea to our framework, we represent similar skeletons
as nearby points in the geometric space. However, in-
stead of selecting vantage objects from the database
and computing the distance from each database shape
to the same vantage objects, we select branches within
each shape independently of the other shapes. Thus,
while the database has to be given offline to com-
pute the vantage objects for the technique presented
in (Vleugels and Veltkamp, 2002), no such restriction
is needed for the proposed approach. As an applica-
tion, we implemented our approach on two datasets
for shape retrieval experiments and showed the ef-
ficacy of the proposed technique for shape retrieval.
Figure 2 demonstrates an overview of the proposed
approach.
The rest of the paper is organizedas follows. After
taking a review of some previous work in Section 2,
we describe the proposed approach in Section 3. We
present the experimental results in Section 4 and con-
clude the paper in Section 5.
2 RELATED WORK
In this section, we briefly review some existing shape
Figure 2: Overview of the proposed approach. The input
shapes are first represented as medial axis graphs, whose
vertices represent skeletons and whose edges show vertices
adjacency. After the branch points are determined and or-
dered, we find the shortest path distance between each ver-
tex and branch, which, in turn, represents each skeleton in
the geometric space. The distance between the points sets
are then computed using the Earth Mover’s Distance (EMD)
algorithm.
matching techniques. Shape context (SC) (Belongie
et al., 2002) is a powerful shape descriptor based on
counter points. The algorithm starts by generating
n discrete counter points. The set of n − 1 vectors
originating from point p
i
to all other points represents
the overall shape relative to p
i
. This information is
encoded in the spatial histogram called shape con-
text. Although this algorithm has a good descriptive
power, it does not perform well for shapes with articu-
lation parts. To deal with this problem, inner distance
shape context algorithm (Ling and Jacobs, 2007) has
been proposed. Given a set of boundary points on
the shape, this algorithm considers the shortest path
between each point pair. The approach has been
shown to be robust to shape deformation, however, its
main shortcoming is its sensitivity to the number of
boundary points, e.g., with low number of such points
its performance drops dramatically (Guocheng et al.,
2010).
Guocheng et al. presents a framework dealing
with the problems of describing part structure and
articulation for shape recognition (Guocheng et al.,
2010). The approach first performs equal space sam-
pling on the shape contours. For each contour c, the
algorithm draws circles centered at c and computes
the ratio of the number of pixels that lie within the
shape to the total number of pixels. The distance be-
tween two shapes is computed using χ
2
test statistics
without using the point coordinates. Recently, Sirin
and Demirci (Sirin and Demirci, 2014) extended this
technique by relaxing the requirement of the same
number of points for each input shape, which are rep-
resented as skeletons and taking into consideration the
point coordinates during the matching stage.
A number of methods have been presented for
skeleton-based shape matching. In (Liu and Geiger,
1999) shape axis tree defined by the locus of mid-
points for optimally corresponding boundary points
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
354

are matched. Using graph topology changing op-
erations may result in matches that do not preserve
the coherence of the shape. Sharvit et al. pro-
poses a shock graph-based shape recognition frame-
work (Sharvit et al., 1998). Although this method
has shown promising results, the errors of fundamen-
tal flows can break the hierarchical relations among
parts of the shape. In (Siddiqi et al., 2002), shape
recognition is achieved by solving the problem of
subgraph isomorphism. Shock graphs are converted
into rooted trees, which in turn are matched using a
tree matching algorithm. In (Sebastian et al., 2004),
the distance between two shapes is computed using
the least action path deforming one shape to another.
Yang et al. presents a shape classification framework
based on statistics of dissimilarities between shortest
skeleton paths (Yang et al., 2007). After finding end
node in a medial axis graph, the algorithm computes
the shortest path distances between all pairs of end
nodes. Based on the sequences of radii of the max-
imal disks at corresponding skeleton points on these
paths, the algorithm obtains similarity scores between
input skeletons.
Given two similar shapes, it is well known that mi-
nor boundary deformation and part articulation may
lead to significantly different skeletal representations.
This, in turn, will have a negative impact on the
shape matching algorithms, as it induces a large dis-
tance. To address this problem, skeleton pruning al-
gorithms have been developed. Before the comput-
ing the skeletons, some of these algorithms perform
boundary smoothing process (Dimitrov et al., 2000;
Siddiqi et al., 2002), which may shift the skeleton po-
sitions due to the change in boundary locations. In
some other methods (Shaked and Bruckstein, 1998;
Ogniewicz and K¨ubler, 1995), an importance of each
skeleton is computed and skeletons whose impor-
tance values are less than a predefined threshold is
removed. In our framework, we used a recently devel-
oped skeleton pruning technique, where the decision
regarding whether a skeletal branch should be pruned
or not is based on the context of the boundary seg-
ment (Shen et al., 2011).
3 SHAPE REPRESENTATION
THROUGH BRANCH NODES
In this section, we first describe the shape descrip-
tor for the proposed approach. We then present the
matching algorithm used in our framework.
Figure 3: Shapes are represented as a medial axis graphs,
whose verteices represent the regions skeletons and whose
edges represent vertices adjacency. A branch in the graph
(shown with a black dot) represents a point where either
three or more region’s parts meet or an end point of a region.
The number associated with each branch indicates its order
based on the local histogram.
3.1 Shape Descriptor
The shape of a region can be represented as a medial
axis graph, whose vertices represent the regionsskele-
tons and whose edges represent vertices adjacency.
The medial axis (Blum, 1967) captures the symme-
tries of a region, and its branches can be thought of as
the regions parts (Demirci et al., 2009). A junction in
the medial axis graph, thus, represents a point where
three or more region’s parts meet. To find branhces
in the medial axis graph, we use vertices of degree 1
or ≥ 3. Assuming that shapes of similar objects have
similar stable skeletons, the branches of degree 1 or
degree ≥ 3 are likely to represent or connect simi-
lar parts. Figure 3 presents an example, where each
branch is shown with a dot. Although the shapes are
captured from different viewpoints, their branches are
similar, representing and connecting similar region’s
parts.
After computing the branches, we find the short-
est path distance from each vertex (skeleton) to each
branch in the medial axis graph. Let the vertex set
V and the branch set B in the graph are denoted by
V = {v
1
, v
2
, . . . , v
n
} and B = {b
1
, b
2
, . . . , b
k
}, respec-
tively. Finding the distance from each vertex to each
branch in the medial axis graph represents vertex v
i
in a k−dimensional vector space such that coordinate
c
j
corresponds to the weight of the shortest path be-
tween v
i
and b
j
, where v
i
∈ V, b
j
∈ B, 1 ≤ i ≤ n,
and 1 ≤ j ≤ k. Based on the work of Eberly who
finds the distance between two points in the scale-
space (Eberly, 1994), we define the distance d(s
i
, s
j
)
between skeletons s
i
and s
j
, located respectively at
(x
i
, y
i
) and (x
j
, y
j
) as follows:
d(s
i
, s
j
) =
q
(x
i
− x
j
)
2
+ (y
i
− y
j
)
2
+ (r
i
− r
j
)
2
, (1)
where r
i
(r
j
) corresponds to the radii of the maximal
ShapeClassificationbasedonSkeleton-branchDistances
355

disk associated with s
i
(s
j
). Let p = {v
1
, v
2
, . . . , v
m
}
denote the shortest path between a vertexand a branch
point. The weight of this path is then computed as:
w(p) =
m−1
∑
i=1
d(v
i
, v
i+1
). (2)
Using the above procedure, skeletons are likely
to be represented into geometric spaces of different
dimensions as the dimensionality of the geometric
space is defined by the number of branches. There-
fore, a registration step whose objectiveis to represent
the skeletons in the same space must be performed.
To do this, we bring up lower dimensional skele-
tons to higher dimensions by padding them with ze-
ros. Let b
m
denote the maximum number of branches
in a database shape. Suppose that shape S
1
has b
1
branches and b
1
≤ b
m
. By adding b
m
− b
1
0-valued
coordinates, we make the dimensions of the skeletons
equal in the geometric space. In case the number of
branches in the the query is greater than b
m
, we re-
duce dimension of its skeletons using a dimension-
ality reduction technique, e.g., Principal Component
Analysis.
One may notice that the position of a skeleton
in the vector space is effected by the order of the
branches, i.e., with different branch ordering the same
skeleton is represented in different coordinates. In or-
der to obtain consistency in our procedure, we order
the branches by their relative position with respect
to their neighbors. Specifically, we compute the lo-
cal histogram around each branch using the radii of
its neighbors. If we map the radii of branch neigh-
bors containing n bins, then the histogram H becomes
a vector (h
1
, h
2
, . . . , h
n
), where each element h
i
rep-
resents the number of skeletons whose radii lies in
the range associated with bin i. Stricker and Orengo
showed that a slight shift in the histogram may result
in a large dissimilarity between histograms of sim-
ilar images (Stricker and Orengo, 1995). To make
our branch ordering process robust to small shifts, we
use cumulative histograms as suggested by this work.
Given a cumulative histogram H = (h
1
, h
2
, . . . , h
n
) as-
sociated with each branch, we first compute α
1
×h
1
+
α
2
×h
2
+. . . +α
n
×h
n
, where each α is a constant be-
tween 0 and 1, α
1
≤ α
2
≤ . . . ≤ α
n
and
∑
n
i=1
α
i
= 1,
and order the branches by this value. In Figure 3, each
branch is shown with its order number obtained using
this procedure.
3.2 Matching in the Geometric Space
The final step of our algorithm is to match the skele-
ton representations in high dimensional geometric
spaces. To compute the matching, we use the Earth
Movers’ Distance (EMD) algorithm (Rubner et al.,
2000), which has been successfully used in several
applications, e.g., (Wang and Guibas, 2012; Xu et al.,
2012; Li et al., 2013; Shokoufandeh et al., 2012). The
EMD finds the optimum match between two sets by
computing the minimum amount of work required to
transform the first point set into the other.
Formally, let P
1
and P
2
be the first and second
point sets with n and m points, respectively. Let
D = [d
ij
] be the ground distance matrix, where d
ij
is the ground distance between points s
i
∈ P
1
and
s
j
∈ P
2
. We define d
ij
based on Equation 1. The ob-
jective of EMD is to compute a flow matrix F = [ f
ij
],
with f
ij
being the flow between p
i
and q
j
, minimizing
the overall distance:
Work(P
1
, P
2
, F) =
m
∑
i=1
n
∑
j=1
f
ij
d
ij
(3)
subject to:
f
ij
≥ 0, 1 ≤ i ≤ m, 1 ≤ j ≤ n
∑
n
j=1
f
ij
≤ w
s
i
, 1 ≤ i ≤ m
∑
m
i=1
f
ij
≤ w
s
j
, 1 ≤ j ≤ n
∑
m
i=1
∑
n
j=1
f
ij
= min
∑
m
i=1
w
p
i
,
∑
n
j=1
w
q
j
,
where w
s
i
(w
s
j
) represents the radius of the maximal
disk associated with skeleleton s
i
(s
j
).
4 EXPERIMENTS
The proposed approach is evaluated in the context of
a shape retrieval experiment using two datasets. The
first dataset is a subset of ALOI (Amsterdam Library
Object Images) (Geusebroek et al., 2005) database
and consists of 1440 silhouettes of 20 classes, with
72 rotated views for each. The top four rows of Fig-
ure 4 present sample silhouettes, while the bottom
row shows sample views for the same object.
We used leave-one-out procedure to the dataset in
our experimental setup. Precisely, the first shape from
the database is removedand used as a query for the re-
maining database shapes. After the query shape is put
back in the database, and the procedure is repeated
with the next shape from the database. Ideally, given
a view of an object class, the shape retrieval algo-
rithm should return an other view of the same class
as its nearest neighbor. Based on the overall matching
statistics, we observe that the proposed method ob-
tains 96.2% correct nearest neighbor retrieval rate. In
Figure 5, we present 2 correct experimental results for
each class and the images of the last row are selected
from the wrong classifications, which are shown in
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
356
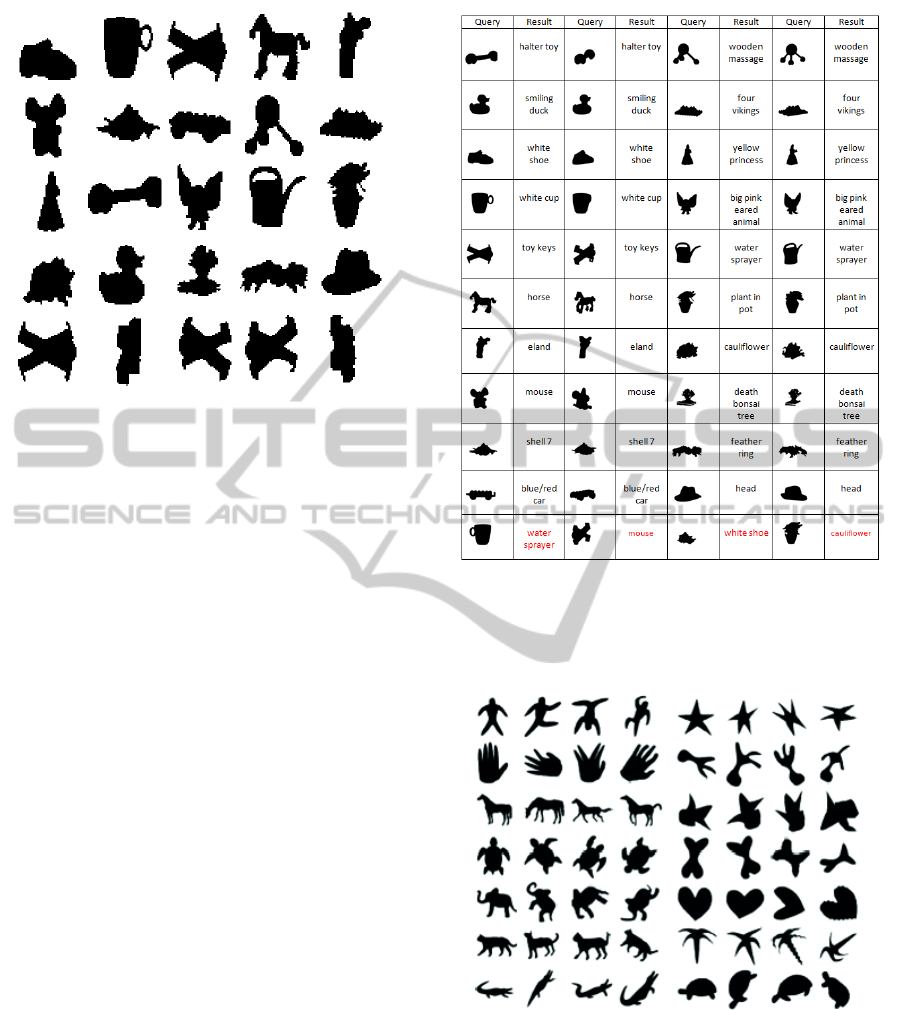
Figure 4: The top four rows present sample views for each
class from the subset of the ALOI dataset, while the bottom
row shows different views for the same class.
red. Upon taking a closer look at the results, we note
that the misclassifications are mostly due to the simi-
lar skeletons of different objects from specific views.
Thus, taking a closer look at the last row we notice
that the similarity between the skeletons of the cup
and water sprayer, toy keys and mouse, shell7 and
white shoe, plant in pot and cauliflower have a neg-
ative effect on the retrieval results.
To compare our results to two alternative shape
classification algorithms, we use the Aslan and Tari
dataset consisting of 14 classes with 4 shapes in each
class (Aslan and Tari, 2005). The silhouettes are
shown in Figure 6. While the first approach uses
contour points (Sun and Super, 2005), the second ap-
proach is based on the statistics of dissimilarities of
the shortest paths between a pair of skeletons (Yang
et al., 2007). According to the results, out of 56
queries while the proposed framework yields 2 wrong
results, these methods result in 4 and 1 wrong classifi-
cations, respectively. The correct classification accu-
racies are, thus, recorded as 96.4% for our approach,
92.8% for the first, and 98.2% for the second tech-
niques. Although our performance is slightly worse
than that of (Yang et al., 2007), the results still indi-
cate an important retrievalpotential of our framework.
In addition, these two alternative approaches employ
the Bayesian classifier to perform the retrieval task.
We expect that arming our framework with a classi-
fier will improve its results.
Finally, to evaluate the fitness of our approach for
dealing with noise, we perturbed each query by ran-
domly deleting its skeletons whose size was chosen
randomly to fall between 10% and 35% of the total
number of skeletons. The same experimental setup is
Figure 5: Part of the classification results. The text with
black and red colors indicate correct and wrong classifica-
tions, respectively. The misclassifications are mostly due to
the similar skeletons of different objects from some specific
views.
Figure 6: Aslan and Tari dataset consists of 14 classes with
4 shapes in each class. Each row shows images of two dif-
ferent classes.
then used with the perturbed queries for both datasets.
According the results, the nearest neighbor retrieval
score for our approach was dropped around 5% in
both datasets, reflecting the algorithm’s robustness to
missing data. The robustness of the proposed method
can be attributed to (i) the stable skeleton extraction,
(ii) the branch ordering, (iii) the effectiveness of the
ShapeClassificationbasedonSkeleton-branchDistances
357

EMD for partial matching. Although the true occlu-
sion experiment would require replacing some part
of the shape with an occluder, this experiment still
presents promising results for handling the occlusion.
5 CONCLUSIONS
In this paper, we have proposed a novel method to
classify a given shape using its skeletal representa-
tion. The algorithm starts by representing a shape as a
medial axis graph, whose vertices represent the skele-
tons and whose edges represent vertices adjacency.
After obtaining the branches in the graph, we com-
pute the shortest path distance from each vertex to
each branch, representing the corresponding skeleton
in a geometric space. The distance between skele-
tons in the geometric space is computed based on the
Earth Movers’ Distance (EMD) algorithm. A set of
shape retrieval experiments including the comparison
with two previous approaches demonstrate the pro-
posed algorithm’s effectiveness and perturbaton ex-
periments present its robustness.
Although we applied our method to skeletal shape
representations in this paper, we will test the frame-
work to color object representations in the future. Our
future work will also include employing a classifier
into the framework and performing a more compre-
hensive comparison of our approach to more leading
shape retrieval algorithms using larger datasets, in-
cluding a test regarding the time efficiency of each
system. In addition, designing an indexing system
based on the similar idea is an interesting research di-
rection on which we will work in the future.
ACKNOWLEDGEMENT
This work has been supported in part by T
¨
UB
˙
ITAK
(Grant# 113E500).
REFERENCES
Ardizzone, E., Cascia, M. L., Gesu, V. D., and Valenti,
C. (1996). Content-based indexing of image and
video databases by global and shape features. In
Proceedings of the International Conference on Pat-
tern Recognition (ICPR ’96) Volume III-Volume 7276
- Volume 7276, ICPR ’96, pages 140–, Washington,
DC, USA. IEEE Computer Society.
Aslan, C. and Tari, S. (2005). An axis-based representa-
tion for recognition. In ICCV, pages 1339–1346. IEEE
Computer Society.
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape
matching and object recognition using shape con-
texts. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 24(4):509–522.
Blum, H. (1967). A Transformation for Extracting New
Descriptors of Shape. In Wathen-Dunn, W., editor,
Models for the Perception of Speech and Visual Form,
pages 362–380. MIT Press, Cambridge.
Blum, H. and Nagel, R. (1978). Shape description using
weighted symmetric axis features. Pattern Recogni-
tion, 10(3):167–180.
Demirci, F., Shokoufandeh, A., and Dickinson, S. (2009).
Skeletal shape abstraction from examples. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 31(5):944–952.
Dimitrov, P., Phillips, C., and Siddiqi, K. (2000). Robust
and efficient skeletal graphs. In Computer Vision and
Pattern Recognition, 2000. Proceedings. IEEE Con-
ference on, volume 1, pages 417–423. IEEE.
Eberly, D. (1994). A differential geometric approach to
anisotropic diffusion. In Haar Romeny, B., editor,
Geometry-Driven Diffusion in Computer Vision, vol-
ume 1 of Computational Imaging and Vision, pages
371–392. Springer Netherlands.
Geusebroek, J., Burghouts, G., and Smeulders, A. (2005).
The amsterdam library of object images. International
Journal of Computer Vision, 61(1):103–112.
Guocheng, A., Fengjun, Z., Hong’an, W., and Guozhong,
D. (2010). Shape filling rate for silhouette representa-
tion and recognition. In Pattern Recognition (ICPR),
2010 20th International Conference on, pages 507–
510.
Li, P., Wang, Q., and Zhang, L. (2013). A novel earth
movers distance methodology for image matching
with gaussian mixture models. ICCV.
Ling, H. and Jacobs, D. (2007). Shape classification us-
ing the inner-distance. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 29(2):286–299.
Liu, T. and Geiger, D. (1999). Approximate tree matching
and shape similarity. In Computer Vision, 1999. The
Proceedings of the Seventh IEEE International Con-
ference on, volume 1, pages 456–462. IEEE.
Ogniewicz, R. and K¨ubler, O. (1995). Hierarchic voronoi
skeletons. Pattern recognition, 28(3):343–359.
Rubner, Y., Tomasi, C., and Guibas, L. J. (2000). The earth
mover’s distance as a metric for image retrieval. Inter-
national Journal of Computer Vision, 40(2):99–121.
Sebastian, T. B. and Kimia, B. B. (2005). Curves vs.
skeletons in object recognition. Signal Processing,
85(2):247–263.
Sebastian, T. B., Klein, P. N., and Kimia, B. B. (2004).
Recognition of shapes by editing their shock graphs.
Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 26(5):550–571.
Shaked, D. and Bruckstein, A. (1998). Pruning medial
axes. Computer vision and image understanding,
69(2):156–169.
Sharvit, D., Chan, J., Tek, H., and Kimia, B. (1998).
Symmetry-based indexing of image databases. In
Content-Based Access of Image and Video Libraries,
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
358

1998. Proceedings. IEEE Workshop on, pages 56–62.
IEEE.
Shen, W., Bai, X., Hu, R., Wang, H., and Jan Latecki, L.
(2011). Skeleton growing and pruning with bending
potential ratio. Pattern Recognition, 44(2):196–209.
Shokoufandeh, A., Keselman, Y., Demirci, M., Macrini,
D., and Dickinson, S. (2012). Many-to-many feature
matching in object recognition: a review of three ap-
proaches. Computer Vision, IET, 6(6):500–513.
Siddiqi, K., Bouix, S., Tannenbaum, A., and Zucker, S.
(2002). Hamilton-jacobi skeletons. International
Journal of Computer Vision, 48(3):215–231.
Sirin, Y. and Demirci, F. (2014). Skeleton filling rate for
shape recognition. In 2014 22nd International Con-
ference on Pattern Recognition (ICPR).
Stricker, M. A. and Orengo, M. (1995). Similarity of Color
Images. In Storage and Retrieval for Image and Video
Databases (SPIE), pages 381–392.
Sun, K. and Super, B. (2005). Classification of contour
shapes using class segment sets. In 2005 IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition (CVPR 2005), 20-26 June 2005,
San Diego, CA, USA, pages 727–733. IEEE Computer
Society.
Vleugels, J. and Veltkamp, R. (2002). Efficient image re-
trieval through vantage objects. Pattern Recognition,
35(1):69–80.
Wang, F. and Guibas, L. (2012). Supervised earth movers
distance learning and its computer vision applica-
tions. In Computer Vision–ECCV 2012, pages 442–
455. Springer.
Xu, J., Zhang, Z., Tung, A., and Yu, G. (2012). Effi-
cient and effective similarity search over probabilis-
tic data based on earth mover’s distance. The VLDB
JournalThe International Journal on Very Large Data
Bases, 21(4):535–559.
Yang, X., Bai, X., Yu, D., and Latecki, L. (2007). Shape
classification based on skeleton path similarity. In En-
ergy Minimization Methods in Computer Vision and
Pattern Recognition, 6th International Conference,
EMMCVPR 2007, Ezhou, China, August 27-29, 2007,
Proceedings, pages 375–386.
ShapeClassificationbasedonSkeleton-branchDistances
359
