
Using Action Objects Contextual Information for a Multichannel SVM in
an Action Recognition Approach based on Bag of Visual Words
Jordi Bautista-Ballester
1,2
, Jaume Verg´es-Llah´ı
1
and Domenec Puig
2
1
ATEKNEA Solutions, V´ıctor Pradera, 45, 08940 Cornell`a de Llobregat, Spain
2
Department of Computer Engineering and Mathematics, Universitat Rovira i Virgili, Tarragona 43007, Spain
Keywords:
Action Recognition, Bag of Visual Words, Multikernel Support Vector Machines, Video Representation.
Abstract:
Classifying web videos using a Bag of Words (BoW) representation has received increased attention due to its
computational simplicity and good performance. The increasing number of categories, including actions with
high confusion, and the addition of significant contextual information has lead to most of the authors focusing
their efforts on the combination of descriptors. In this field, we propose to use the multikernel Support Vector
Machine (SVM) with a contrasted selection of kernels. It is widely accepted that using descriptors that give
different kind of information tends to increase the performance. To this end, our approach introduce contextual
information, i.e. objects directly related to performed action by pre-selecting a set of points belonging to
objects to calculate the codebook. In order to know if a point is part of an object, the objects are previously
tracked by matching consecutive frames, and the object bounding box is calculated and labeled. We code
the action videos using BoW representation with the object codewords and introduce them to the SVM as an
additional kernel. Experiments have been carried out on two action databases, KTH and HMDB, the results
provide a significant improvement with respect to other similar approaches.
1 INTRODUCTION
The number of videos uploaded online is increasing
every day and recently the analysis of their content
has become an intense field of research. In this con-
text, our research focuses on the recognition of action
in videos containing contextual information about the
means by which an action is carried out. Initially, the
sort of databases over which the actions were con-
formed a set of videos where scenes and parameters
such as illumination, focus, distance, and viewpoints
were mostly controlled, and few or none data existed
on the tools and objects that were involved in the ac-
tion. For example, the KTH database (Schuldt et al.,
2004), a popular choice to test different action recog-
nition techniques, has not such kind of information.
In any case, we use this database in the present work
to show the performance of our approach in compari-
son to the rest of other state-of-the-art approaches.
Recently, however, more realistic databases have
increasingly been employed in order to go beyond
the current state of the art. These sets include videos
that stage more realistic actions. A relevant database,
HMDB (Kuehne et al., 2011), is one of the largest ac-
tion video database to-date with 51 action categories,
which in total contain almost 7,000 manually anno-
tated clips extracted from a variety of sources ranging
from digitized movies to YouTube. This database has
been created to evaluate the performance of computer
vision systems for action recognition and explore the
robustness of these methods under various conditions
such as cluttered backgrounds, fast irregular motions,
occlusions and camera motion. Several approaches
have been proposed in the literature for the recogni-
tion of actions in diverse real-world videos. In this
database, actions that are contextually connected to
the tool or object employed in their performance can
be found.
In order to increase the robustness of the recog-
nition of actions in more challenging situations, we
propose an approach that is able to integrate two
sources of information relevant to discriminate ac-
tions, namely, the space-time data that describes the
motion and the contextual information that explains
how the action is carried out. Specifically, by using
the HMDB (Kuehne et al., 2011) database, we se-
lect a subset of actions that are performed using a tool
or object, a contextual information that allows to dis-
criminate apparently similar actions such as shooting
a gun or a bow, which its biggest difference lies in
78
Bautista-Ballester J., Vergés-Llahí J. and Puig D..
Using Action Objects Contextual Information for a Multichannel SVM in an Action Recognition Approach based on Bag of VisualWords.
DOI: 10.5220/0005301000780086
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 78-86
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
the object employed to carry out the action. We ex-
plain how these different sources of information can
be combined in richer description of human actions
that permits higher recognition rates.
The main contributions of this paper, in contrast
to other approaches which can be found in recent
surveys (Poppe, 2010; Weinland et al., 2011), are
the introduction of contextual information of actions
into BoW-based descriptors and a recognition struc-
ture that allows the addition of new information us-
ing multichannel SVM (Zhang et al., 2006). Multi-
channel SVM has previously proven very successful
in action recognition (Wang et al., 2013; Bilinski and
Corvee, 2013) and we take advantage of this structure
by adding data which is strictly not a descriptor of
motion but contextual information describing the tool
employed in the action, which is a new way of using
multichannel SVM.
With respect to the type of action descriptor, local
space-time features (Dollar et al., 2005; Laptev,2005)
have shown to be successful for general action recog-
nition because they avoid non-trivial pre-processing
steps, such as tracking and segmentation, and provide
descriptors invariant to illumination and camera mo-
tion. In particular, HOG3D (Kl¨aser et al., 2008) has
proven to outperform most of this sort of descriptors
(Willems et al., 2008; Scovanner et al., 2007). An-
other approach has been trying to find the best combi-
nations of different simpler descriptors. To this end,
(Snoek et al., 2005) studied the different methods of
descriptor fusion and classified them into early or late
fusion approaches. The former one consists in a fu-
sion before the training step, while the latter is a fu-
sion afterwards.
Concerning the combination of features, (Ikizler-
Cinbis and Sclaroff, 2010) combines six different de-
scriptors for three different contextual information,
namely, people (HOF and HOG3D), objects (HOF
and HOG), and scene (GIST and color histograms).
Their combination is accomplished using a multiple
MIL approach, which is a concatenation of bag repre-
sentations and classified with an L2-Regularized Lin-
ear SVM. On the other hand, (Bilinski and Corvee,
2013) uses relative dense tracklets for action recogni-
tion. They compute two specific descriptors, SMST
and RMST, in order to obtain information from the
actions relative to the head of the performer. Two
more descriptors encoding space and time, HOG and
HOF, are employed. A multichannel χ
2
kernel SVM
is used for the combination of this set of descrip-
tors. Similarly, (Wang et al., 2011; Wang and Schmid,
2013) computedense trajectories and their descriptors
–HOG, HOF, and MBH– to finally combine them us-
ing a multichannel SVM. In contrast, using a late fu-
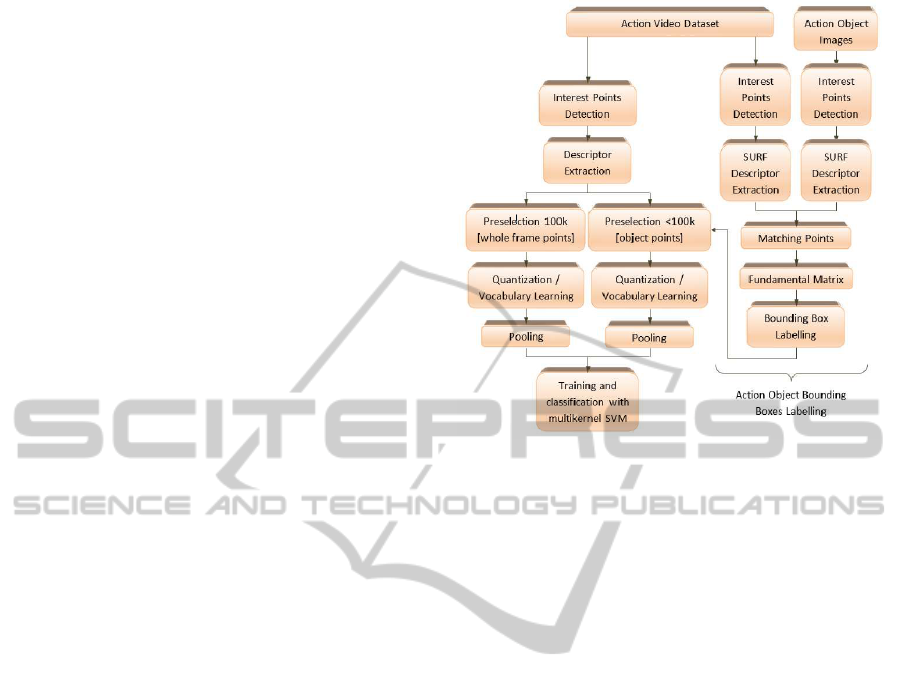
Figure 1: Scheme overview in the proposed approach.
sion of the descriptors the approach in (Reddy and
Shah, 2013) trains a SVM for a scene context descrip-
tor and another SVM for a motion descriptor, using a
histogram intersection kernel. The two probability es-
timates obtained separately from each SVM are fused
into one single recognition output afterwards.
In our work, we use information describing the
object involved in an action using a BoW based action
recognition approach. To this end, we first detect the
set of points belonging to the object by matching them
to an instance of the object. This process also labels
the bounding boxes, which are later used to compute
a new codebook –the dictionary employed to com-
pute the relative frequencies in a BoW description–,
and the information about the objects in the actions is
preserved as a consequence. Afterwards, we employ
such codebook to encode the video frames comput-
ing a BoW description. Finally, we combine the two
source of information, motion and context, by means
of a multikernel SVM. Experimental results show that
this procedure improves the recognition of actions.
The rest of the paper is organized as follows. In
Section 2, we detail our approach for action object de-
tection and the method employed to label the bound-
ing box around contextual information. In this section
we also show how to use these labels during posterior
codebook generation. Experimental setup and the two
databases used to evaluate our method is explained in
Section 3. In Section 4, we present our experimental
results over the two databases. Finally, in Section 5
we discuss the results and conclude with future direc-
tions of the work.
UsingActionObjectsContextualInformationforaMultichannelSVMinanActionRecognitionApproachbasedonBagof
Visual Words
79
2 SCHEME OVERVIEW
The main goal of our method is to introduce object
information relevant to the action into the BoW based
representation of action. In Section 2.1 we explain the
method employed to detect and track the objects in the
video frames and extract the bounding box enclosing
the object as well as the way to label the object. In
Section 2.2 we consider the procedure to add this ob-
ject information into the training system. A flowchart
describing our approach is shown in Fig. 1.
2.1 Object Detection and Tracking
In order to add contextual information related to the
object appearing in an action, we must find the ob-
ject in the video sequence. Each video contains one
action, and we detect one object per action. There-
fore, we obtain one instance image of each object per
video and use this image to find the object along the
whole video by matching a set of points previously
extracted from the frame and the instance image. The
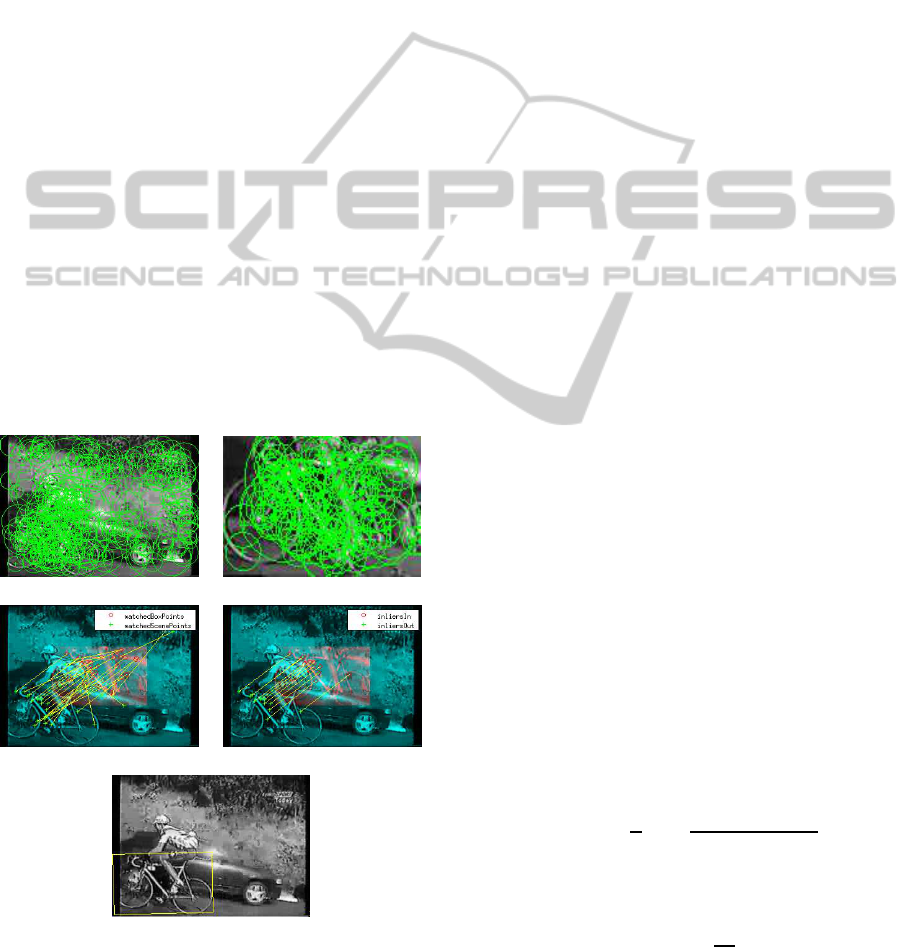
matching procedure, based on the epipolar geometry
described in (Hartley and Zisserman, 2004), is descri-
bed in Fig. 2. The points are extracted using a Har-
ris corner detector and by SURF features. This way
ensures a large set of points belonging to the object,
(a) Frame detected points (b) Object detected points
(c) All matches (d) Inliers
(e) Bounding box
Figure 2: First row: point detection and descriptor ex-
traction for a video frame and the object image. Second
row: matches and outlier filtering. Third row: transformed
bounding box.
which is necessary to obtain good point correspon-
dences and compute a representative bounding box.
Then, we compute the point matching applying the
Nearest Neighbor algorithm and set a threshold to se-
lect the strongest matches.
Finally, we compute the fundamental matrix –
excluding outliers by using Random Sample Consen-
sus (RANSAC)– and use it to obtain a transformation
of the initial bounding box. This ensures more accu-
racy around the area that limits the object in the frame.
The result of this procedure is a bounding box enclos-
ing the object used in each action for each frame in
the video as can be seen in Fig. 2.
In order to add this information to the overall
scheme, we first extract Space-Time Interest Points
(STIP) (Laptev, 2005) from each frame and video and
compute their descriptor. Next, we select a maximum
of 100k of object points applying the bounding boxes
labels. Then, we construct a codebook from the pre-
selected words belonging to objects and combine this
codebook with others using the multikernel SVM ex-
plained in the following section.
2.2 Multikernel for SVM
Visual features extracted from a video can represent
a wide variety of information, such as scene (e.g.,
GIST (Solmaz et al., 2012)), motion (e.g., HOF (Lu-
cas and Kanade, 1981), MBH (Dalal et al., 2006),
HOG3D (Kl¨aser et al., 2008)) or evenjust color (color
histograms). To classify actions using all these fea-
tures the information must be fused in an appropriate
way. According to the moment of the combination,
(Snoek et al., 2005) proposed a classification of the
fusion schemes in early or late fusion. In early fusion
the descriptors are combined before training a classi-
fier (e.g., concatenating (Ikizler-Cinbis and Sclaroff,
2010; Reddy and Shah, 2013)), and in late fusion the
classifiers are trained for each descriptor and the fu-
sion is done for the results of all these classifiers (e.g.,
probabilistic fusion (Reddy and Shah, 2013)).
We use an early fusion in our approach since the
combination is done before the training. A SVM with
a chi-squared kernel is used for classification,
χ
2
(h
i
,h
j
) =
1
2
n
∑
k=1
(h
i
(k) − h
j
(k))
2
h
i
(k) + h
j
(k)
(1)
fusing all different descriptors by summing their
kernel matrices normalized by the average distance.
K(h
i
,h
j
) = exp(−
∑
c
1
A
c
χ
2
(h
c
i
,h
c
j
)) (2)
The value of A
c
is the mean value of χ
2
distances
between the training samples for the c-th channel
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
80

Table 1: Descriptors used to encode frames.
Descriptor Characteristics Reference
trajectories KLT tracker or SIFT matcher (Jiang et al., 2012)
HOG static appearance information from local gradients (Dalal and Triggs, 2005)
HOF local motion information (Lucas and Kanade, 1981)
MBH separately computes vertical and horizontal OF components (Dalal et al., 2006)
HOG3D spatio-temporal extension of HOG (Kl¨aser et al., 2008)
(Zhang et al., 2006). All the weights are set to one,
meaning that none of the kernels is more discrimina-
tive than the others.
3 EXPERIMENTAL SETUP
In this section object detection and tracking are con-
sidered in detail. Afterwards, we introduce the feature
encoding in our evaluation step. Finally, the databases
and their experimental setup are exposed.
3.1 Object Detection
The points used to identify and track the objects are
a mixture of points obtained with Harris corner de-
tector and features computed applying SURF. We use
a threshold between 0,04 and 0,1 for Harris detector
and a maximum number of 1000 points for SURF.
This ensures enough quantity of points with enough
quality belonging to the object, even in the case the
object appearing in the video sequence is relatively
small, like a ball or a sword. For the matching, we
select the strongest 1% matches, which is restrictive
but ensures better point correspondences.
3.2 BoW based Encoding
To encode frames, we use the BoW approach. First,
we make use of STIP points following the work in
(Laptev, 2005). We compute different descriptors
for each point, namely, HOG3D, trajectories, HOG,
HOF, and MBH. In the case of HOG3D descriptors,
we set the parameters optimized for the KTH database
as described in (Kl¨aser et al., 2008), resulting in 1008
dimensions in total. In the case of trajectories, HOG,
HOF, and MBH, we follow the work of (Wang et al.,
2011) and set the parameters as they did. The di-
mensions of these descriptors are, respectively, 30 for
trajectories, 96 for HOG, 108 for HOF and 192 for
MBH, which are significantly smaller than HOG3D.
DENSE T is obtained as the concatenation of trajec-
tories, HOG, HOF and MBH, which represents an
early fusion and its dimension is 426. We train a
codebook for each descriptor type using a maximum
of 100k randomly sampled features. For the object
kernel, we ensure the object point selection using the
method described in Section 2.
Afterwards, we group the points employing the
k-Means clustering algorithm with a maximum of 5
iterations. The size of the codebook is set to 500
words, following (Reddy and Shah, 2013)(Bilinski
and Corvee, 2013) where the codebook size is limited
to 500 or 1000 to avoid over-learning and despite the
fact that the larger the number of clusters employed,
the better the performance is. Finally, a SVM with an
exponential chi-squared kernel is used for classifica-
tion, combining all different descriptors by summing
their kernel matrices and normalizing the result by the
average distance. We use a 10 fold cross-validation
with one-against-all approach. For all the experiments
we employ the default parameter values in the libsvm
library (Chang and Lin, 2011).
3.3 Databases Used in the Experiments
As previously said, we test our approach with two dif-
ferent databases, KTH and HMDB. KTH is database
by (Schuldt et al., 2004) that does not contain any
tool or object related to any action. Despite we can
not take advantage of any contextual data, this exper-
imentation allows us to test whether our approach is
comparable to these of the state of the art. HMDB
database is collected by (Kuehne et al., 2011) and is a
more challenging and realistic one where objects used
in actions are present.
3.3.1 KTH Database
The KTH database (Schuldt et al., 2004) consists of 6
actions performed by 25 actors in a structured homo-
geneous environment with a total of 598 videos. The
actions performed are boxing, hand-waving, hand-
clapping, running, walking and jogging, with no ob-
ject involved in any of these actions. In order to
reduce the computational burden, we pre-select 12
videos for any action performed by randomly se-
UsingActionObjectsContextualInformationforaMultichannelSVMinanActionRecognitionApproachbasedonBagof
Visual Words
81
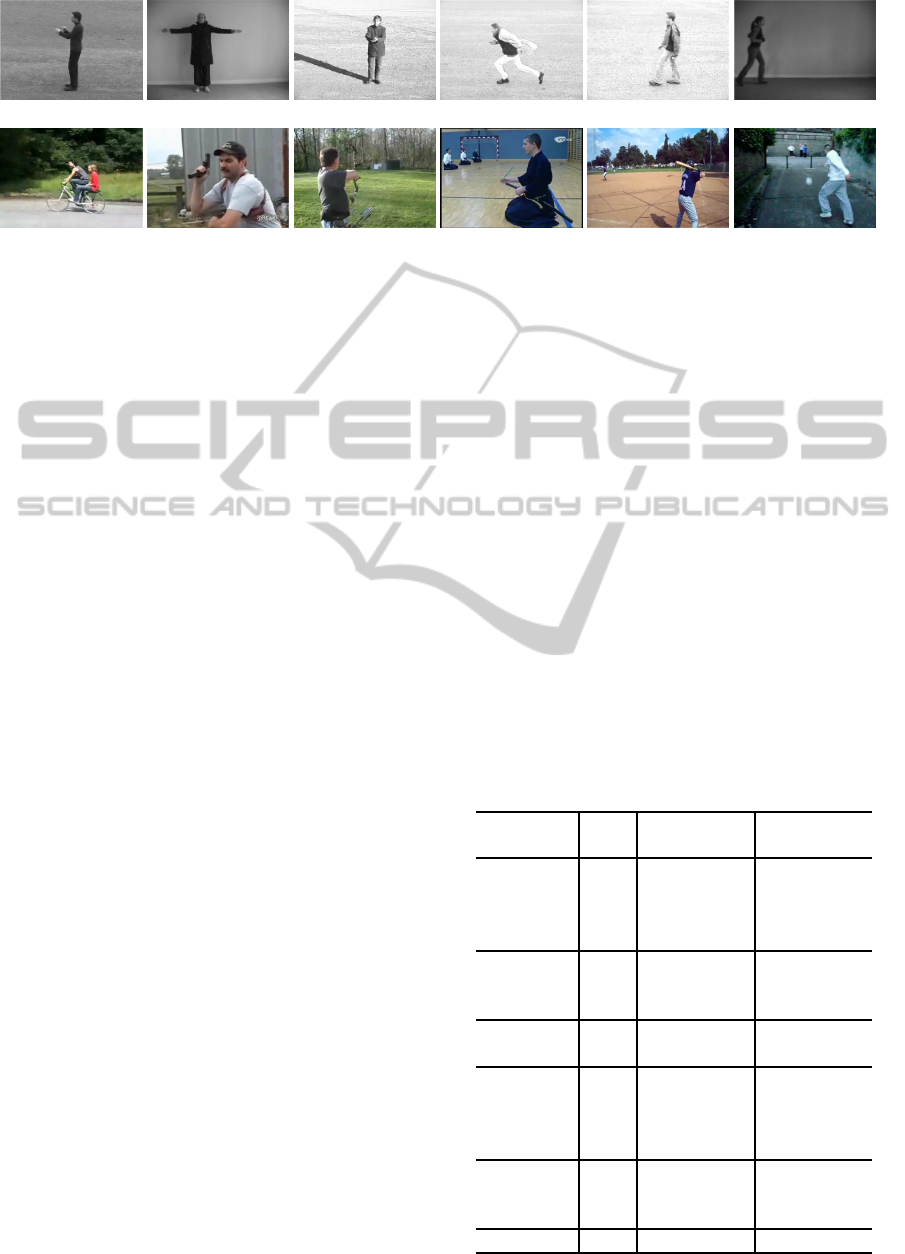
(a) Boxing (b) Hand waving (c) Hand clapping (d) Running (e) Walking (f) Jogging
(g) Ride bike (h) Shoot gun (i) Shoot bow (j) Draw sword (k) Swing baseball (l) Kick ball
Figure 3: Example frames from KTH database (first row) and HMDB database (second row). We use all the actions in KTH,
that is, (a) boxing, (b) hand waving, (c) hand clapping, (d) running, (e) walking, (f) jogging, and a subset of the 51 actions in
HMDB that include objects, (g) ride bike, (h) shoot gun, (i) shoot bow, (j) draw sword, (k) swing baseball, and (l) kick ball.
lected actors into different environments, ensuring
that as many variation as possible are employed,
i.e., scene, person, illumination and camera distance,
which makes a total of 72 videos.
3.3.2 HMDB Database
The HMDB database (Kuehne et al., 2011) consists of
51 actions from a total of 6,849 videos collected from
a variety of sources ranging from digitized movies to
YouTube videos. The action categories are grouped in
five types: general facial actions, facial actions with
object manipulation, general body movements, body
movements with object interaction, and body move-
ments for human interaction.
Considering that we need actions with object in-
teraction, we do not follow the original splits pro-
posed by (Kuehne et al., 2011). We reduce the com-
putational cost by pre-selecting 6 different actions
with 20 videos per action, resulting in 120 videos in
total. The pre-selected actions are ride bike, shoot
gun, shoot bow, draw sword, swing baseball and kick
ball. The purpose of this selection is dual: first, ensur-
ing that an object is involvedin the action, and second,
ensuring the presence of as many variations as possi-
ble. Similar actions are also taken into account, a fact
that makes the set more challenging.
In order to ensure the presence of as many varia-
tions as possible, we follow a proportion of clips sim-
ilar to that in the complete database. The whole set of
videos corresponding to these 6 actions has a 63.44%
of actions showing the full body, a 32.51% showing
the upper body, a 2.46% the head, and a 1.59% the
lower body. The set we selected has a proportion of
63.33%, 32.5%, 2.5% and 1.67% respectively. We
also maintain the same proportions for the number of
people involved (1,2, other), camera motion (motion,
no motion), camera viewpoint relative to the author
(front, back, left, right) and for the video quality (bad,
medium, good). All the values of these proportions
can be seen in Table 2.
4 EXPERIMENTAL RESULTS
We first analyze the use of multikernel SVM in Sec-
tion 4.1. We want to know whether there is a dif-
ference in using a single kernel or a multiple kernel.
Also, we compare the effect of different combinations
of descriptors. In Section 4.2 we evaluate the impact
of the addition of contextual information, based on
the detection of the object related to the action.
Table 2: HMDB subset selection. We maintain proportions
with respect to the original set of videos for the same ac-
tions: ride bike, shoot gun, shoot bow, draw sword, swing
baseball, and kick ball.
Original set our own set
(%) (%)
part f 63.44 63.33
of body h 1.59 2.5
l 2.46 1.67
u 32.51 32.5
♯ people np1 92.77 90.83
np2 4.19 3.33
npn 3.04 5.84
camera cm 52.46 60.83
motion nm 47.54 39.17
camera ba 18.06 20
viewpoint fr 49.28 46.66
le 16.91 16.67
ri 15.75 16.67
video bad 19.80 21.67
quality goo 8.24 9.16
med 71.96 69.17
♯ videos 692 120
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
82
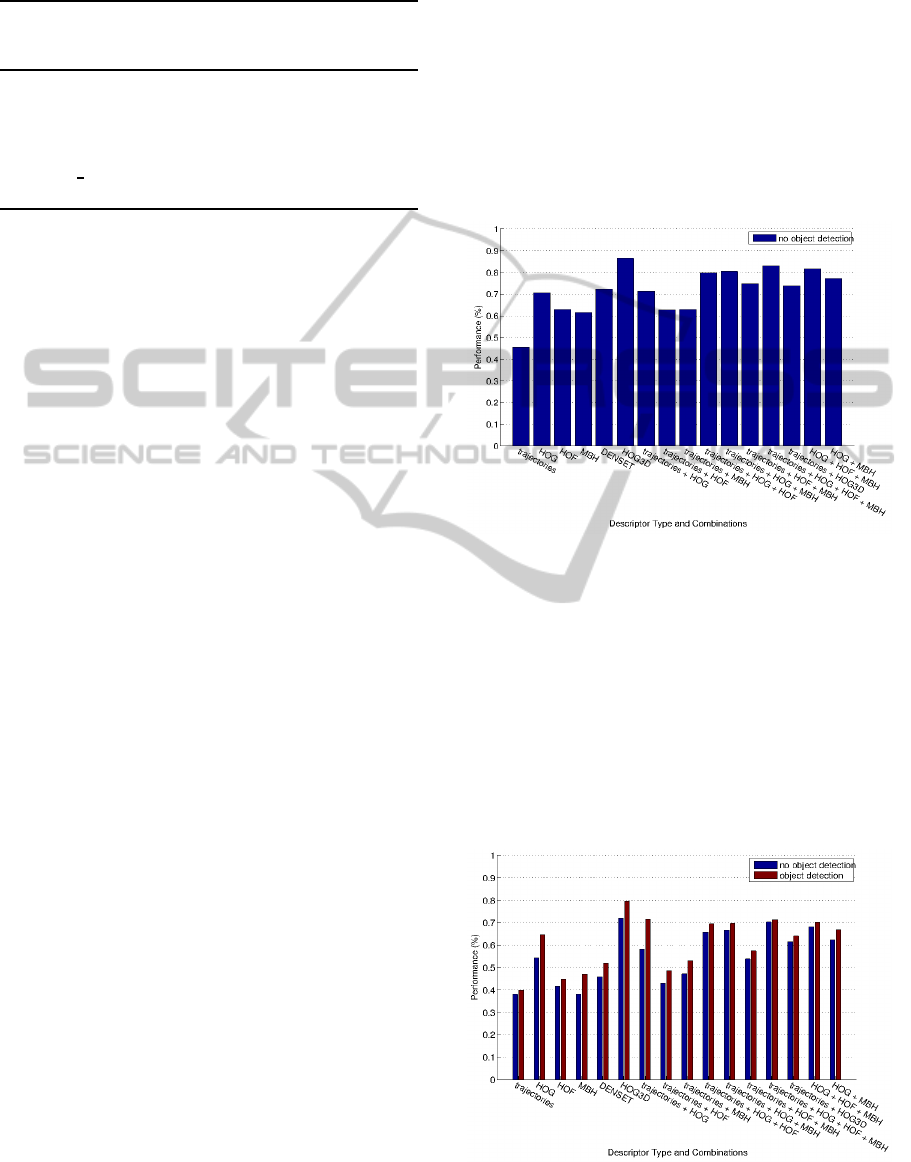
Table 3: Comparison of different descriptors on the
databases using our approach.
Databases KTH HMDB HMDB ∆
+ obj
(%) (%) (%) (%)
trajectories 45.51 38.13 39.81 1.68
HOG 70.63 54.29 64.76 10.47
HOF 62.99 41.67 44.78 3.11
MBH 61.55 38.3 47.10 8.8
DENSE T 72.42 45.81 53.99 8.18
HOG3D 86.57 71.98 79.58 7.6
4.1 Channel Selection
The use of a multikernel SVM allows us to add differ-
ent descriptors into the traditional BoW approach for
action recognition. This approach permits to include
several descriptors into this scheme as explained in
(Wang et al., 2011), where a combination of trajec-
tories, HOG, HOF, and MBH is employed, and ana-
lyze how their combination by means of a multiker-
nel SVM improves the performance with respect to
any singular descriptor. In our work we do the same
for a different set of descriptors, including trajecto-
ries, HOG, HOG, MBH, DENSET (an early fusion of
them) and HOG3D. Results for all these descriptors
using our approach can be seen in Table 3.
In our procedure, we have chosen a first descrip-
tor and have progressively added new ones in order
to see the effect of including new information into the
kernel. To see the best improvements, we have cho-
sen the descriptor that contributes the least, i.e., tra-
jectories. These results can be seen in Table 4. Ini-
tially, this single descriptor gives a performance of
38.13%. Adding a descriptor that contributes more,
HOG, the new value is 57.83%, which shows an im-
provement surpassing a 50% increase. On the other
hand, adding another weak descriptor, HOF, the new
value becomes 43.0%, which represents an improve-
ment of a 12.8%. This fact shows the importance of
choosing a good combination of descriptors. Almost
all the additions improve the results, but the question
is which one provides the best results since adding
new channels results in higher computational costs.
Therefore, we want the least number of channels that
obtains the best results.
4.2 Evaluation of Adding Contextual
Information
In the case of the KTH database, where no objects
are available, the present method equals the results
of the multichannel approach in (Wang et al., 2011).
However, there is a significant improvement in the
case where contextual information is present. In that
case, our method outperforms the results obtained for
all the descriptors, ranging from a minimum increase
of 1.68% (HOF) to a maximum of 10.47% (HOG).
The same happens when combination of descriptors
are used and adding objects to the HOG + trajectories
combination generates the highest increase, 13.74%,
which also outperforms the rest of combinations. The
highest value for each database is highlighted in bold-
face in Table 4.
Figure 4: Evaluation of our approach for the KTH database.
The idea of contextual information influence can
be seen in the confusion matrices in Fig. 6. For exam-
ple, shoot bow has confusions with the rest of actions,
that is, 7% with ride bike, 17% with draw sword, 29%
with shoot gun, 22% with swing baseball, and 5%
with kick ball. After adding object information, these
values are all reduced: 5% with ride bike, 15% with
draw sword, 24% with shoot gun, 20% with swing
baseball and 5% with kick ball, which means that
the confusion of this action with respect to the rest
Figure 5: Evaluation of our approach using object detection
for the HMDB database.
UsingActionObjectsContextualInformationforaMultichannelSVMinanActionRecognitionApproachbasedonBagof
Visual Words
83

Table 4: Comparison of different descriptors combinations on the databases with our approach.
Databases KTH HMDB HMDB + obj ∆
(%) (%) (%) (%)
trajectories + HOG 71.33 57.83 71.57 13.74
trajectories + HOF 62.77 43.00 48.64 5.64
trajectories + MBH 62.98 45.38 52.99 7.61
trajectories + HOG + HOF 79.83 64.67 69.39 4.72
trajectories + HOG + MBH 80.5 66.45 69.66 3.21
trajectories + HOF + MBH 74.68 53.44 57.45 4.01
trajectories + HOG + HOF + MBH 82.94 70.04 72.97 2.93
trajectories + HOG3D 73.67 61.56 64.07 2.51
HOG + HOF + MBH 81.66 68.09 70.23 2.14
HOG + MBH 77.13 60.39 66.92 6.53
is smaller as a consequence of including contextual
information into the action description.
HOG3D and DENSET descriptors are used here
to show two significant facts. First, that using a
unique optimal descriptor is better than a combination
of severaldescriptors that individuallyperform worse.
This is apparent by the fact that HOG3D, which fuses
information of space and time in a single descriptor,
obtains a 71.98%. This result cannot be reached ei-
ther by a concatenation of descriptors –trajectories,
HOG, HOF, and MBH– or by a multikernel combi-
(a) HMDB (b) HMDB with objects
(c) KTH
Figure 6: Confusion matrix for the (a) HMDB database us-
ing trajectories, HOG, HOF, MBH descriptors as it is done
in (Wang et al., 2011) with average performance for 500
codewords: 68.09%, (b) HMDB with our approach using
the same configuration as (a), with average performance
for 500 codewords: 70.23%, and (c) confusion matrix for
the KTH database using trajectories, HOG, HOF, MBH de-
scriptors as it is done in (Wang et al., 2011). Average per-
formance for 1000 codewords: 81.66%
nation of the same descriptors, despite the latter is al-
most as good as HOG3D and reaches a performance
of 70.04% while the former can at most get a value of
45.81%. Moreover, despite that no combination can
outperform the best results reached by HOG3D, the
addition of object information is able to increase the
HOG3D result an extra 7.6%, up to 79.58%. There-
fore, it is clearly stated that including contextual in-
formation always results in an improvement.
Secondly, that combining descriptors is something
that should be done with adequate criteria: Tables 3
and 4 show that early combination as a concatenation
perform worse (45.81%) than using a late composi-
tion of trajectories, HOG, HOF, and MBH (70.04%)
using a multikernel SVM. Figures 4 and 5 summarize
all these results.
From the results obtained in this Section, we can
state there is a clear improvement in the action recog-
nition task as a consequence of including contextual
information in the action description and recognition.
Moreover, the present paper shows a method that al-
lows the obtaining and addition of such information.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we have proposed a method to incor-
porate action contextual information that extends a
previous method used to combine motion related in-
formation into a standard action recognition scheme
based on BoW. This approach allows the addition of
information related to the tool or object employ in
the execution of an action and shows an increment of
the overall recognition performance. We have shown
that adding information without any specific purpose
might lead to a lack of improvement adding the con-
sequent computational cost to the scheme. Our ap-
proach complements space and time information and
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
84

proposes a procedure to add any sort of contextual in-
formation that can be further generalized to include
other data apart from the object used during an ac-
tion. Additionally, the present approach shows that
the best results are obtained when kernels from spa-
cial, temporal, and tool informationare combined into
a multichannel SVM kernel. In this respect, the high-
est recognition rates are 71.57% using a combination
of trajectories, HOG and object. In the near future we
plan to add more contextual information –scene– in
order to improve the results.
ACKNOWLEDGEMENTS
This research has been partially supported by the
Industrial Doctorate program of the Government of
Catalonia, and by the European Community through
the FP7 framework program by funding the Vinbot
project (N 605630) conducted by Ateknea Solutions
Catalonia.
REFERENCES
Bilinski, P. and Corvee, E. (2013). Relative Dense Track-
lets for Human Action Recognition. 10th IEEE Inter-
national Conference on Automatic Face and Gesture
Recognition.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM:
A library for support vector machines. ACM
Transactions on Intelligent Systems and Tech-
nology, 2:27:1–27:27. Software available at
http://www.csie.ntu.edu.tw/ cjlin/libsvm.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proceedings of the
2005 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR’05) -
Volume 1 - Volume 01, CVPR ’05, pages 886–893,
Washington, DC, USA. IEEE Computer Society.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appear-
ance. In Proceedings of the 9th European Conference
on Computer Vision - Volume Part II, ECCV’06, pages
428–441, Berlin, Heidelberg. Springer-Verlag.
Dollar, P., Rabaud, V., Cottrell, G., and Belongie, S. (2005).
Behavior recognition via sparse spatio-temporal fea-
tures. In Proceedings of the 14th International Con-
ference on Computer Communications and Networks,
ICCCN ’05, pages 65–72, Washington, DC, USA.
IEEE Computer Society.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Ikizler-Cinbis, N. and Sclaroff, S. (2010). Object, scene and
actions: Combining multiple features for human ac-
tion recognition. In Proceedings of the 11th European
Conference on Computer Vision: Part I, ECCV’10,
pages 494–507, Berlin, Heidelberg. Springer-Verlag.
Jiang, Y., Dai, Q., Xue, X., Liu, W., and Ngo, C. (2012).
Trajectory-based modeling of human actions withmo-
tion reference points. In European Conference on
Computer Vision (ECCV).
Kl¨aser, A., Marszałek, M., and Schmid, C. (2008). A spatio-
temporal descriptor based on 3d-gradients. In British
Machine Vision Conference, pages 995–1004.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., and Serre,
T. (2011). HMDB: a large video database for human
motion recognition. In Proceedings of the Interna-
tional Conference on Computer Vision (ICCV).
Laptev, I. (2005). On space-time interest points. Int. J.
Comput. Vision, 64(2-3):107–123.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings of the 7th International Joint
Conference on Artificial Intelligence - Volume 2, IJ-
CAI’81, pages 674–679, San Francisco, CA, USA.
Morgan Kaufmann Publishers Inc.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image Vision Comput., 28(6):976–990.
Reddy, K. K. and Shah, M. (2013). Recognizing 50 human
action categories of web videos. Mach. Vision Appl.,
24(5):971–981.
Schuldt, C., Laptev, I., and Caputo, B. (2004). Recognizing
human actions: A local svm approach. In Proceedings
of the Pattern Recognition, 17th International Confer-
ence on (ICPR’04) Volume 3 - Volume 03, ICPR ’04,
pages 32–36, Washington, DC, USA. IEEE Computer
Society.
Scovanner, P., Ali, S., and Shah, M. (2007). A 3-
dimensional sift descriptor and its application to ac-
tion recognition. In Proceedings of the 15th Inter-
national Conference on Multimedia, MULTIMEDIA
’07, pages 357–360, New York, NY, USA. ACM.
Snoek, C. G. M., Worring, M., and Smeulders, A. W. M.
(2005). Early versus late fusion in semantic video
analysis. In Proceedings of the 13th Annual ACM
International Conference on Multimedia, MULTIME-
DIA ’05, pages 399–402, New York, NY, USA. ACM.
Solmaz, B., Modiri, S. A., and Shah, M. (2012). Classifying
web videos using a global video descriptor. Machine
Vision and Applications.
Wang, H., Kl¨aser, A., Schmid, C., and Liu, C. (2013).
Dense trajectories and motion boundary descriptors
for action recognition. International Journal of Com-
puter Vision.
Wang, H., Kl¨aser, A., Schmid, C., and Liu, C.-L. (2011).
Action Recognition by Dense Trajectories. In IEEE
Conf. on Computer Vision & Pattern Recognition,
pages 3169–3176, Colorado Springs, United States.
Wang, H. and Schmid, C. (2013). Action Recognition with
Improved Trajectories. In ICCV 2013 - IEEE Interna-
tional Conference on Computer Vision, pages 3551–
3558, Sydney, Australie. IEEE.
Weinland, D., Ronfard, R., and Boyer, E. (2011). A sur-
vey of vision-based methods for action representation,
UsingActionObjectsContextualInformationforaMultichannelSVMinanActionRecognitionApproachbasedonBagof
Visual Words
85

segmentation and recognition. Computer Vision Im-
age Understanding, 115(2):224–241.
Willems, G., Tuytelaars, T., and Gool, L. (2008). An effi-
cient dense and scale-invariant spatio-temporal inter-
est point detector. In Proceedings of the 10th Euro-
pean Conf. on Computer Vision: Part II, ECCV ’08,
pages 650–663, Berlin, Heidelberg. Springer-Verlag.
Zhang, J., Marszalek, M., Lazebnik, S., and Schmid, C.
(2006). Local features and kernels for classification of
texture and object categories: A comprehensive study.
In Proceedings of the 2006 Conference on Computer
Vision and Pattern Recognition Workshop, CVPRW
’06, pages 13–, Washington, DC, USA. IEEE Com-
puter Society.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
86
