
Recognition of Human Actions using Edit Distance on Aclet Strings
Luc Brun
1
, Pasquale Foggia
2
, Alessia Saggese
2
and Mario Vento
2
1
GREYC UMR CNRS 6072, ENSICAEN - Universit
´
e de Caen Basse-Normandie, 14050 Caen, France
2
Dept. of Computer Eng. Electrical and Eng.Applied Mathematics, University of Salerno
Via Giovanni Paolo II, 132, Fisciano (SA), Italy
Keywords:
Action Recognition, Human Behavior Analysis, String Based Representations, Edit Distance.
Abstract:
In this paper we propose a novel method for human action recognition based on string edit distance. A two
layer representation is introduced in order to exploit the temporal sequence of the events: a first representation
layer is obtained by using a feature vector obtained from depth images. Then, each action is represented as a
sequence of symbols, where each symbol corresponding to an elementary action (aclet) is obtained according
to a dictionary previously defined during the learning phase. The similarity between two actions is finally
computed in terms of string edit distance, which allows the system to deal with actions showing different
length as well as different temporal scales. The experimentation has been carried out on two widely adopted
datasets, namely the MIVIA and the MHAD datasets, and the obtained results, compared with state of the art
approaches, confirm the effectiveness of the proposed method.
1 INTRODUCTION
The recognition of human actions has attracted in
the last years several scientists working in the pat-
tern recognition and computer vision fields (Turaga
et al., 2008; Poppe, 2010; Weinland et al., 2011; Vish-
wakarma and Agrawal, 2013). This is mainly due to
the following facts: first, the applicative outcome is
considerable, ranging from video surveillance to am-
bient assisted living and business intelligence appli-
cation fields. Second, this problem can be seen as
a rather traditional pattern recognition task: a set of
features is computed on the sequence of images and
is used to feed a classifier, which is trained on a set of
labeled training data.
Starting from this last assumption, the main fo-
cus of the scientific community up to now has been
on the definition of novel feature sets, tailored to dis-
criminate the different actions of interest. For in-
stance, in (Mokhber et al., 2005) actions are repre-
sented through a spatio-temporal cuboid, which is de-
scribed by a geometrical transform based on Hu mo-
ments; in (Dollar et al., 2005) the cuboid is built by
exploiting a 2D Gaussian filter for managing the spa-
tial dimensions and a 1D Gabor filter for the temporal
one. Scale and translation invariance is the main fo-
cus of the methods presented by (Chen et al., 2011),
(Wang et al., 2007) and (Yuan et al., 2013); in par-
ticular, the former adopts the Radon transform while
the last two approaches exploit an extended version,
namely the R transform.
Independently of the particular way in which the
features are designed, one of the main limitations
of the above mentioned systems lies in the fact that
their decision is strongly influenced by the noise in-
troduced during the feature extraction step. For this
reason, in the last years a common trend of the sci-
entific community has been to introduce a high level
representation, aimed at increasing the overall recog-
nition performance. In (Zhang and Gong, 2010) and
(Sung et al., 2012), for instance, the use of an Hidden
Markov Model (HMM) is proposed. In general, the
main drawback of HMM based approaches lies in the
large amount of labeled data required during the train-
ing step, which is often not simple to obtain in real
environments. In (Foggia et al., 2014) a deep learn-
ing architecture is introduced, aiming at extracting a
high level representation of the actions directly from
the data. Although they show very promising results,
both the methods based on HMM and deep learning
architectures are very difficult to configure and in gen-
eral the achievement of good results requires a signif-
icant expertise in the field.
The introduction of a high level representation for
actions has been also exploited in (Dollar et al., 2005),
(Li et al., 2013) and (Foggia et al., 2013), where a
bag of words approach has been adopted. The main
idea is to use the first-level feature vectors to recog-
97
Brun L., Foggia P., Saggese A. and Vento M..
Recognition of Human Actions using Edit Distance on Aclet Strings.
DOI: 10.5220/0005304700970103
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 97-103
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

nize small elements of an action called visual words;
then the histogram of the occurrences of such visual
words is used as a high-level feature vector to per-
form the classification of the action. The set of the
visual words is defined by constructing a codebook
using an unsupervised learning approach. The main
drawback of the bag of words methods is that they
base their decision only on the occurrence or on the
absence of the relevant visual words (the elementary
actions) within the analyzed time window; the order
in which these words appear is not taken into account.
However, for human beings, this order is an impor-
tant piece of information for discriminating between
similar actions. On the other hand, a element-wise
comparison of the observed sequence of visual words
with the one obtained for a reference action would not
yield good results, because of two kinds of problems:
first, the speed of execution of the same action by dif-
ferent persons (or even by the same person at different
times) may change; the change may even be not uni-
form within the same action. Second, both because
of noise in the first-level representation and of indi-
vidual differences in the way an action is performed,
an observed sequence of visual word will likely con-
tain spurious elements with respect to the correspond-
ing reference action in the training set, and conversely
may lack some elements of the latter.
In order to overcome the above mentioned prob-
lems, in this paper we propose a system for Human
Action Recognition based on a string Edit Distance
(HARED); each action is represented as a sequence
of symbols (a string) according to a dictionary ac-
quired during the learning step. The similarity be-
tween two strings is computed by a string edit dis-
tance, measuring the cost of the minimal sequence of
edit operations needed to transform one string into the
other; the string edit distance is robust with respect
to local modifications (such as the insertion or dele-
tion of symbols) even when they change the length of
the string, thus dealing in a natural way with speed
changes and with spurious elementary actions.
The experimentation, conducted over two stan-
dard datasets, confirms the robustness of the proposed
approach, both in absolute terms and in comparison
with other state of the art methodologies.
2 THE PROPOSED METHOD
In Figure 2c an overview of the proposed approach is
shown; more details about each module, namely first
layer representation, second layer representation and
classification will be detailed in the following.
2.1 Feature Extraction
The feature vector is extracted by analyzing depth
images acquired by a Kinect sensor. This choice is
mainly justified by the following reasons: first, the
device has a very affordable cost, so making such
method especially suited for budget-constrained ap-
plications. Furthermore, in (Carletti et al., 2013)
the authors proved the effectiveness of a set of fea-
tures obtained by the combination of three differ-
ent descriptors, respectively based on Hu Moments,
R transform and Min-Max variations, computed on
depth images. Starting from the above considerations,
in this paper we decided to adopt the same feature
vector. It is worth pointing out that the focus of this
paper is on the string-based high level representation,
as well as on the measure introduced for evaluating
the distance between two actions; it means that any
kind of feature vector could be profitably used.
In order to compute the feature vector, we first ex-
tract the set of derived images, proposed in (Megavan-
nan et al., 2012) and shown in Figure 2, able to model
the spatio-temporal variations of each pixel: in par-
ticular, at each frame the last N frames are processed
through the employing of a sliding window so as to
obtain the Average Depth Image (ADI), the Motion
History Image (MHI) and the Depth Difference Im-
age (DDI). In our experiments N has been set to one
second, as suggested in (Megavannan et al., 2012).
In particular, the ADI is the average depth at posi-
tion (x,y) over the images at times t − N + 1,...,t;
it uses N temporally adjacent depth images in or-
der to capture the motion information in the third di-
mension. The MHI is able to capture into a single
and static image the sequence of motions; In par-
ticular, MHI(x,y,t) = 255 if the point (x,y) passes
from background to foreground at time t, otherwise
it is equal to max{M(x,y,t − 1) − τ,0}. τ is a con-
stant set in our experiments to (256/N) − 1, as sug-
gested in (Megavannan et al., 2012). Finally, the DDI
evaluates the motion changes in the depth dimen-
sion: DDI(x,y,t) = D
max
(x,y,t) − D
min
(x,y,t), where
D
max
(x,y,t) and D
min
(x,y,t) are the maximum and
minimum depth for position (x, y) over the images at
times t − N + 1, ... ,t, respectively.
Both the MHI and the ADI are represented
through the seven Hu moments, which are invariant
to translation, scale and orientation. DDI is repre-
sented through a combination of the R transform and
the Min-Max Depth Variations. The former is an
extended 3D discrete Radon transform, able to cap-
ture the geometrical information of the interest points.
Although its very low computational complexity, R
transform is robust with respect to errors occurring
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
98
Second Level String
Representation
Codebook
C=(c
1
,…,c
|C|
)
v
1
c
1
c
2
c
3
c
F
v
n
…
First Level Feature Vector
Representation
v
n
<c
2
,…,c
3
>
v
1
Action
Edit Distance
K-NN Classifier
Training samples
Prototypes
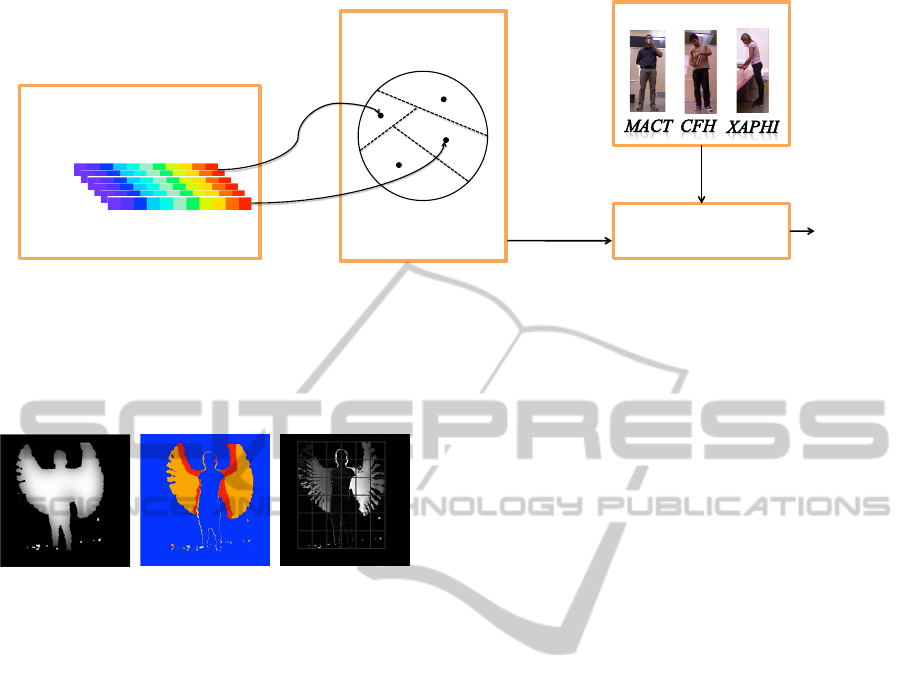
Figure 1: An overview of the proposed method. Each feature vector is associated to a visual symbol (here for
simplicity represented as a letter), according to the codebook previously extracted during the learning step. Thus,
the sequence of symbols is used to build a string that will be fed to the K-NN classifier based on the edit distance;
the classifier finds the K most similar reference images among those provided in the learning step, and uses their
classes (using a majority scheme) to assign a class to the observed action.
(a) (b) (c)
Figure 2: An example of the three derived images
computed for extracting the first level feature vector,
namely ADI (a), MHI (b) and DDI (c).
during the detection phase, such as disjoint silhouettes
and holes in the shape. Min-Max Depth Variations is
obtained by hierarchically partitioning the bounding
box enclosing the silhouette into cells of equal size
(1x1, 2x1, 1x2, 2x2, 3x3 and 6x6). For each cell,
the minimum and the maximum value is computed,
so obtaining a 108-sized vector.
Note that the features we used are complemen-
tary in their nature, since they are able to analyze the
global distribution of the pixels (Hu Moments and the
Min-Max Depth Variations) and at the same time to
capture those properties related to the alignment of
subregions of the image (R transform).
2.2 String based Representation
A second layer representation based on visual strings
is used to represent the actions. This choice allows
our system to take into account the order, and not only
the occurrence, of sub-actions for characterizing each
action. In particular, (1) each first-level feature vector
is encoded by an aclet, a visual symbol representing
the small and atomic unit of action, namely a sub-
action. (2) Then, the consecutive visual symbols are
concatenated in order to obtain the visual string.
As for the first step, it is worth pointing out that
the space of the possible feature vectors is by its na-
ture ideally infinite. For this reason, during the learn-
ing step a preliminary quantization of the space is
performed in an unsupervised way by using the well-
known K-Means clustering algorithm. In this way, we
are able to generate a codebook C, that is a finite vo-
cabulary of visual symbols, obtained by assimilating
the i-th cluster to its centroid c
i
:
C =
c
1
,. ..,c
|C|
, (1)
being |C| the number of clusters and thus the size of
the dictionary. It is important to highlight that, as we
will show in Section 3, HARED is very robust with re-
spect to different |C| values. This is a very important
and not negligible feature since it makes the proposed
approach easily configurable also by unexperienced
operators.
During the operating phase, the codebook will be
used in order to compute, for each low-level feature
vector v
i
, its closest cluster centroid c
j
chosen from C
and then to associate the i-th visual symbol s
i
:
s
i
= argmin
j
|v
i
− c
j
|
2
for j ∈ {1,. ..,|C|}. (2)
The concatenation of the last |S| symbols are fi-
nally used in order to build the visual string:
S
t
=< s
t−|S|
,..., s
t
>, (3)
where t is the current time instant. The |S| value is
adaptively identified during the learning step by com-
puting the average string length over the training set.
2.3 The Decision Step
Once represented each action as a string, a K-NN
classifier is used. The similarity between two strings
RecognitionofHumanActionsusingEditDistanceonAcletStrings
99

is evaluated by using an edit distance, and in particu-
lar the Levenshtein distance, able to evaluate the dif-
ferences between two sequences in terms of insertion,
deletion and substitution.
The main advantages in the use of a similarity
measure based on edit distance are the following:
first, edit distance takes into account the ordering of
the symbols in the string, differently from methods
based on histograms such as the bag of words ap-
proach; as we said, the order of sub-actions is a sig-
nificant discriminative information for the classifica-
tion of an action. Furthermore, it automatically finds
an optimal alignment between the strings being com-
pared, even a complex one involving different combi-
nations of shrinking and expanding on different parts
of the strings (Xiao et al., 2008); this is important to
deal with possibly different local speeds of execution
of actions. Finally, it is robust to small local changes,
such as the insertion of spurious symbols, and so it is
very well suited to work with noisy input data, such
as those obtained by observing a person in a realistic
environment.
For these very important properties, the edit dis-
tance has been successfully applied in several ap-
plication domains, ranging from computational biol-
ogy to signal processing and text retrieval (Navarro,
2001). Among the different edit distances metrics,
such as Hamming distance and Longest Common
Subsequence, the Levenshtein distance allows the
system to deal with different length strings as well as
to consider the substitution operators, very useful in
order to give a more precise metric.
In a more formal way, let be a =< a
1
,a
2
,..., a
n
>
and b =< b
1
,b
2
,..., b
m
> the two strings of length
respectively n and m. The Levenshtein distance d
mn
evaluates the minimum-cost sequence of operations
required to transform a into b. In particular, when
comparing symbols b
j
and a
i
, three possible edit op-
erations are considered:
• substitution of a
j
with b
i
, with a cost w
sub
(a
j
,b
i
)
(obviously the cost is 0 if a
j
= b
i
);
• insertion of a
j
in the string b, with a cost w
ins
(a
j
);
• deletion of b
i
from the string b, with a cost
w
del
(b
i
);
There is a very elegant recursive formulation
of the problem of finding the minimum edit dis-
tance d
i j
between the substrings < a
1
,. ..,a
j
> and
< b
1
,. ..,b
i
>. The base cases of the recursive for-
mulae are:
d
i0
=
i
∑
k=1
w
del
(b
k
), for 1 ≤ i ≤ m (4)
(a) (b)
(c) (d)
Figure 3: Some examples of the MHAD Dataset (a-b)
and of the MIVIA Dataset (c-d).
d
0 j
=
j
∑
k=1
w
ins
(a
k
), for 1 ≤ j ≤ n (5)
Given the base cases, the generic d
i j
can be de-
fined by the following recurrence:
d
i j
= min
d
i−1, j
+ w
del
(b
i
)
d
i, j−1
+ w
ins
(a
j
)
d
i−1, j−1
+ w
sub
(a
j
,b
i
)
(6)
Finally, the edit distance between the two strings
is defined as:
D(a,b) = d
mn
(7)
In order to speed up the computation of the edit
distance, we computed it by exploiting the dynamic
programming version proposed in (Wagner and Fis-
cher, 1974), whose time complexity is O(mn). Fur-
thermore, considering that in our context we are not
interested in visualizing the sequence of edit op-
erations, the space complexity can be reduced to
O(min(m,n)).
The K-NN classifier uses the edit distance for find-
ing the K reference actions in the training sets; then,
the class of the relative majority of the K actions is
output as the result of the classifier.
3 EXPERIMENTAL RESULTS
The experimentation has been carried out over two
widely adopted datasets, namely the Berkeley Multi-
modal Human Action Detection (hereinafter MHAD)
Dataset (Ofli et al., 2013) and the MIVIA Dataset
(Foggia et al., 2013), both providing RGB-D images
and background for each sequence.
Some examples are reported in Figure 3, while the
actions included in each dataset are listed in Table 1.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
100
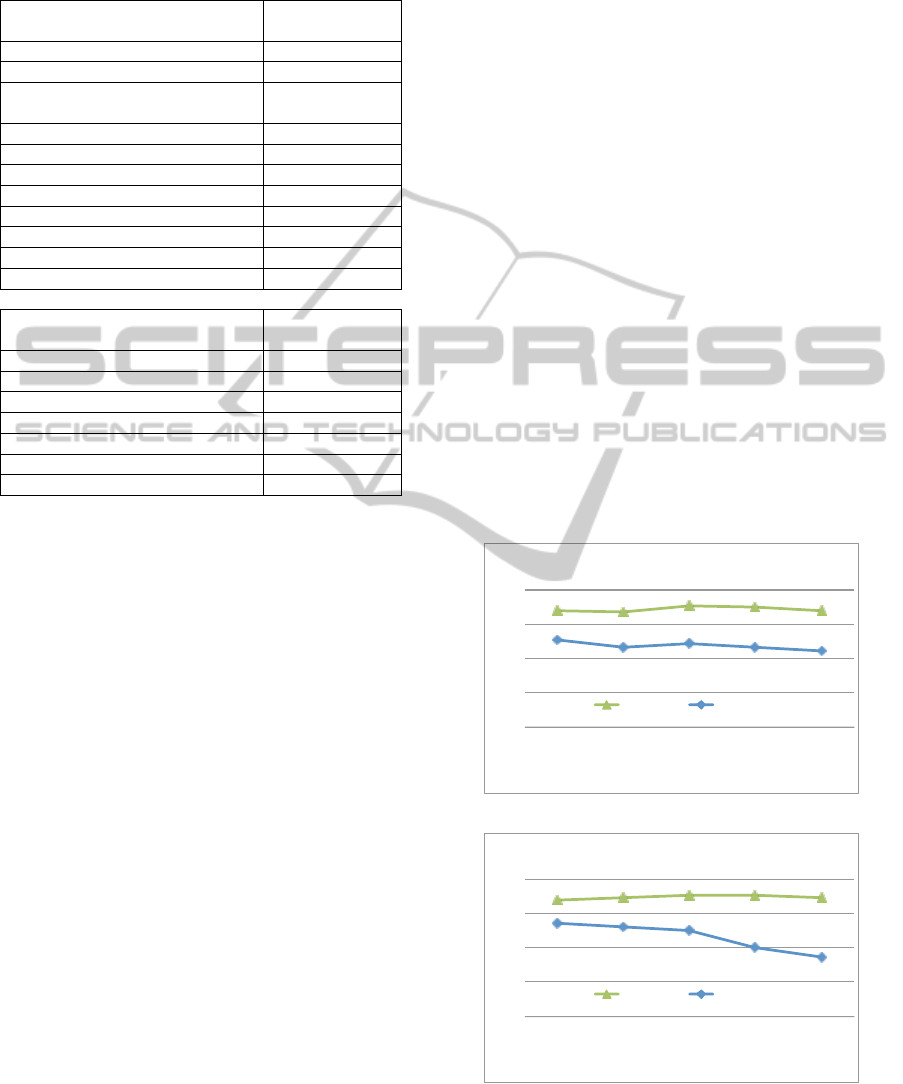
Table 1: Description of the MHAD (a) and of the
MIVIA (b) datasets.
(a)
Action Length per
Recording
Jumping in place 5 secs
Jumping jacks 7 secs
Bending - hands up all the way
down
12 secs
Punching (boxing) 10 secs
Waving - two hands 7 secs
Waving - one hand (right) 7 secs
Clapping hands 5 secs
Throwing a ball 3 secs
Sit down then stand up 15 secs
Sit down 2 secs
Stand up 2 secs
(b)
Action Length per
Recording
Opening a jar 2 sec
Drinking 3 secs
Sleeping 3 secs
Random Movements 11 secs
Stopping 7 secs
Interacting with a table 3 secs
Sitting 3 secs
In particular, the MHAD dataset is based on ac-
tions with movement in both upper and lower extrem-
ities, actions with high dynamics in upper extremities
or actions with high dynamics in lower extremities. It
contains 11 actions performed by 7 male and 5 female
subjects. All the subjects performed 5 repetitions
of each action, yielding about 660 action sequences
which correspond to approximatively 82 minutes of
total recording time. The MIVIA dataset is composed
by 7 actions performed by 14 subjects, 7 male and 7
female. All the subjects performed 2 repetitions of
each action. This dataset is more challenging, since it
is mainly devoted to actions with movement involving
only upper extremities.
As for the parameters of the edit distance and of
the classifier, we have set the costs of the edit opera-
tions to be uniform:
w
ins
(a
j
) = w
del
(b
i
) = 1 (8)
w
sub
(a
j
,b
i
) =
0 if a
j
= b
i
1 if a
j
6= b
i
(9)
For parameter K of the classifier, we have set K = 5
after experimenting with several values over a subset
of the training set.
The experimentation has been carried out accord-
ing to two different protocols simulating different real
scenarios:
• Protocol T1: the person whose actions have to be
recognized is known to the system. It means that
the test person is included in the training set; in
particular, given r repetitions of each action of the
test person, one repetition is included in the train-
ing set while the other r − 1 in the test set. This
protocol simulates, for instance, the home moni-
toring of an elderly person, where it is possible to
adapt the system during the configuration step to
the person under test.
• Protocol T2: the test person is not known to the
system. It implies that the test person is not in-
cluded in the training set, which is formed by
all the repetitions of all the other persons in the
dataset. This protocol simulates those applica-
tions for surveilling public places, where the sys-
tem has to recognize actions of unknown persons.
For each protocol, the tests have been carried out by a
leave-one-out cross-validation strategy; in particular,
each test has been repeated for all the repetitions of
all the persons of each dataset and finally the average
performance have been reported.
The results obtained by varying the |C| parame-
ter are reported in Figures 4a and 4b for the MIVIA
and MHAD datasets, respectively. We can note that in
0,6$
0,7$
0,8$
0,9$
1$
32$ 64$ 128$ 256$ 512$
Clusters(#(
Accuracy(.(MIVIA(
TEST(T1( TEST(T2(
(a)
0,6$
0,7$
0,8$
0,9$
1$
32$ 64$ 128$ 256$ 512$
Clusters(#(
Accuracy(.(MHAD(
TEST(T1( TEST(T2(
(b)
Figure 4: Accuracy computed respectively over the
MIVIA (a) and the MHAD (b) datasets by varying
the |C| parameter.
RecognitionofHumanActionsusingEditDistanceonAcletStrings
101
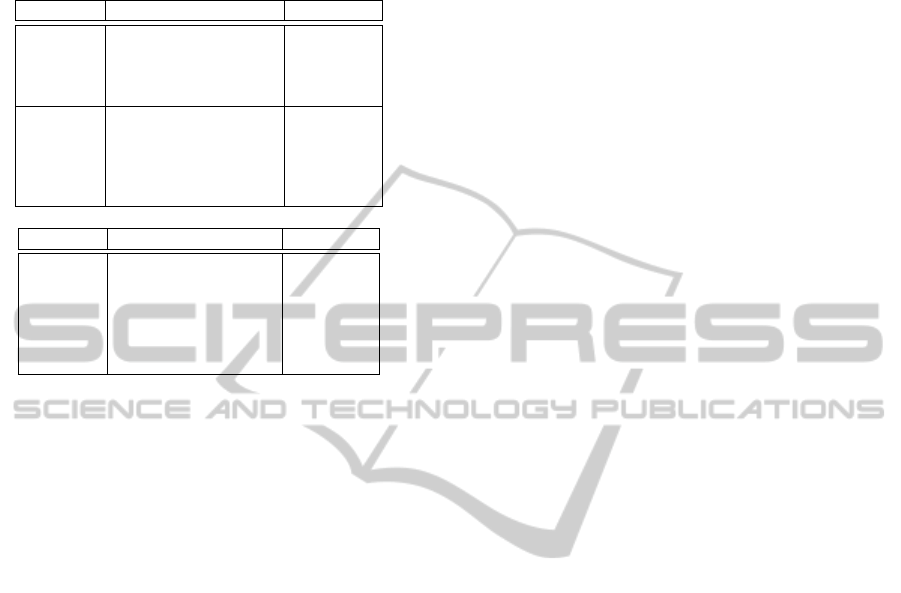
Table 2: Comparison with state of the art approaches
conducted over both the MHAD (a) and MIVIA (b)
datasets.
(a)
Method Source Accuracy
HARED Proposed 87.1
Bow (Foggia et al., 2013) 72.9
BM1 (Cheema et al., 2013) 77.7
Deep (Foggia et al., 2014) 85.8
SMIJ (Ofli et al., 2012) 94.2
HMIJ (Ofli et al., 2012) 82.9
HMW (Ofli et al., 2012) 81.1
LDSP (Ofli et al., 2012) 82.2
BM2 (Cheema et al., 2013) 87.8
(b)
Method Source Accuracy
HARED Proposed 85.2
Cuboids (Dollar et al., 2005) 74.4
Reject (Carletti et al., 2013) 79.8
Bow (Foggia et al., 2013) 84.1
HAcK (Brun et al., 2014) 80.1
Deep (Foggia et al., 2014) 84.7
both the datasets the performance achieved are very
stable with respect to the number of the clusters. It
makes the proposed approach very suited for real ap-
plications, since the set up of the system can be per-
formed in a very simple way also for an unexperi-
enced operators.
Finally, in order to further confirm the effective-
ness of the proposed approach, a proper comparison
has been carried out with several state of the art ap-
proaches, as shown in Table 2. It is worth pointing
out that among the methods listed in Table 2a only
Bow, BM1 and Deep are based on depth information;
in fact, the other methods are based on the skeleton
acquired by a Mocap system, able to capture 3D posi-
tion of active LED markers. Even if improving the
performance of the action recognition system, this
kind of marker can not be easily applied in real envi-
ronments since it requires ad hoc hardware mounted
on the persons under test. Thus, the performance ob-
tained by the proposed approach can be considered
even better in the light of the above considerations.
4 CONCLUSIONS
In this paper we proposed HARED, a novel method
able to recognize human actions by string edit dis-
tance. The main advantages of the proposed approach
are the following: first, the string based representa-
tion allows the system to explicitly take into account
the order of sub-actions within an action; furthermore,
the introduction of the edit distance for evaluating the
similarity between two strings enables the system to
deal with actions of different lengths as well as with
changes in the speed of execution; finally, the edit dis-
tance, being robust to the presence of spurious sym-
bols, makes the approach suitable to work in noisy
environments.
The results obtained by testing the proposed meth-
ods over two standard datasets confirm its effective-
ness: in fact, the accuracy achieved on the MIVIA
dataset (85.2%) is higher with respect to any other
considered state of the art method; the one obtained
on the MHAD dataset (87.1%) is still higher with re-
spect to all the methods exploiting depth images in-
stead of skeleton information. Furthermore, the sta-
bility observed when varying the number of clusters
confirms its usability in real applications, where unex-
perienced human operator may easily set the system
up.
Future work will investigate the possibility of fur-
ther improving the algorithm performance by suit-
ably tuning the edit operation costs during the training
phase.
ACKNOWLEDGEMENTS
This research has been partially supported by
A.I.Tech s.r.l. (http://www.aitech-solutions.eu).
REFERENCES
Brun, L., Percannella, G., Saggese, A., and Vento, M.
(2014). Hack: Recognition of human actions by ker-
nels of visual strings. In Advanced Video and Signal-
Based Surveillance (AVSS), 2014 IEEE International
Conference on.
Carletti, V., Foggia, P., Percannella, G., Saggese, A., and
Vento, M. (2013). Recognition of human actions from
rgb-d videos using a reject option. In ICIAP 2013,
volume 8158, pages 436–445.
Cheema, M. S., Eweiwi, A., and Bauckhage, C. (2013). Hu-
man activity recognition by separating style and con-
tent. Pattern Recognition Letters, (0):–.
Chen, Y., Wu, Q., and He, X. (2011). Human action recog-
nition based on radon transform. In Multimedia Anal-
ysis, Processing and Communications, volume 346,
pages 369–389. Springer Berlin Heidelberg.
Dollar, P., Rabaud, V., Cottrell, G., and Belongie, S. (2005).
Behavior recognition via sparse spatio-temporal fea-
tures. In IEEE International Workshop on Visual
Surveillance and Performance Evaluation of Tracking
and Surveillance, pages 65–72.
Foggia, P., Percannella, G., Saggese, A., and Vento, M.
(2013). Recognizing human actions by a bag of vi-
sual words. In IEEE SMC 2013.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
102

Foggia, P., Saggese, A., Strisciuglio, N., and Vento, M.
(2014). Exploiting the deep learning paradigm for
recognizing human actions. In Advanced Video and
Signal-Based Surveillance (AVSS), 2014 IEEE Inter-
national Conference on.
Li, W., Yu, Q., Sawhney, H., and Vasconcelos, N. (2013).
Recognizing activities via bag of words for attribute
dynamics. In Computer Vision and Pattern Recogni-
tion (CVPR), 2013 IEEE Conference on, pages 2587–
2594.
Megavannan, V., Agarwal, B., and Babu, R. (2012). Hu-
man action recognition using depth maps. In SPCOM
2012, pages 1 –5.
Mokhber, A., Achard, C., Qu, X., and Milgram, M. (2005).
Action recognition with global features. In Sebe,
N., Lew, M., and Huang, T., editors, Computer Vi-
sion in Human-Computer Interaction, volume 3766 of
Lecture Notes in Computer Science, pages 110–119.
Springer Berlin Heidelberg.
Navarro, G. (2001). A guided tour to approximate string
matching. ACM Comput. Surv., 33(1):31–88.
Ofli, F., Chaudhry, R., Kurillo, G., Vidal, R., and Bajcsy,
R. (2012). Sequence of the most informative joints
(smij): A new representation for human skeletal ac-
tion recognition. In CVPRW 2012, pages 8–13.
Ofli, F., Chaudhry, R., Kurillo, G., Vidal, R., and Bajcsy, R.
(2013). Berkeley mhad: A comprehensive multimodal
human action database. In WACV.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image Vision Comput., 28(6):976–990.
Sung, J., Ponce, C., Selman, B., and Saxena, A. (2012). Un-
structured human activity detection from rgbd images.
In ICRA, pages 842–849. IEEE.
Turaga, P., Chellappa, R., Subrahmanian, V. S., and Udrea,
O. (2008). Machine recognition of human activities:
A survey. IEEE T Circuits Syst, 18(11):1473–1488.
Vishwakarma, S. and Agrawal, A. (2013). A survey on ac-
tivity recognition and behavior understanding in video
surveillance. Visual Comput., 29(10):983–1009.
Wagner, R. A. and Fischer, M. J. (1974). The string-to-
string correction problem. J. ACM, 21(1):168–173.
Wang, Y., Huang, K., and Tan, T. (2007). Human activ-
ity recognition based on r transform. In CVPR 2007,
pages 1 –8.
Weinland, D., Ronfard, R., and Boyer, E. (2011). A sur-
vey of vision-based methods for action representation,
segmentation and recognition. Comput. Vis. Image
Und., 115(2):224 – 241.
Xiao, C., Wang, W., and Lin, X. (2008). Ed-join: An effi-
cient algorithm for similarity joins with edit distance
constraints. Proc. VLDB Endow., 1(1):933–944.
Yuan, C., Li, X., Hu, W., Ling, H., and Maybank, S.
(2013). 3d r transform on spatio-temporal interest
points for action recognition. In Computer Vision and
Pattern Recognition (CVPR), 2013 IEEE Conference
on, pages 724–730.
Zhang, J. and Gong, S. (2010). Action categorization with
modified hidden conditional random field. Pattern
Recogn., 43(1):197–203.
RecognitionofHumanActionsusingEditDistanceonAcletStrings
103
