
A Method for Detecting Long Term Left Baggage based on Heat Map
Pasquale Foggia, Antonio Greco, Alessia Saggese and Mario Vento
∗
Dept. of Computer Eng. and Electrical Eng. and Applied Mathematics, University of Salerno,
Via Giovanni Paolo II, 132, Fisciano (SA), Italy
Keywords:
Left Bag, Abandoned Luggage, Stopped Object Detection.
Abstract:
In this paper we propose a method able to identify the presence of objects remaining motionless in the scene
for a long time by analyzing the videos acquired by surveillance cameras. Our approach combines a back-
ground subtraction strategy with an enhanced tracking algorithm. The main contributions of this paper are
the following: first, spatio-temporal information is implicitly encoded into a heat map; furthermore, differ-
ently from state of the art methodologies, the background is not updated by only evaluating the instantaneous
movement of the objects, but instead by taking into account their whole history encoded in the heat map. The
experimentation has been carried out over two standard datasets and the obtained results have been compared
with state of the art approaches, confirming the effectiveness and the robustness of our system.
1 INTRODUCTION
In the last years the research community has shown a
great interest toward the problem of detecting stopped
objects. This is mainly due to the wide range of ap-
plicative fields where such technology may be prof-
itably used, ranging from left baggages detection in
metro stations and airports to the detection of garbage
illegally dumped along the streets.
Although it is not possible to partition the ex-
isting methods into clear-cut, non-overlapping cat-
egories, two different typologies of approaches can
be identified, namely tracking-based and background-
subtraction based. The methods belonging to the for-
mer category first locate a foreground object when
it is moving and then analyze its trajectory so as
to check if it becomes a stationary object. On the
other hand, the approaches based on the second cate-
gory take advantage of a properly defined background
model and on foreground extraction techniques to de-
tect stopped objects.
As for the tracking-based approaches, in (Guler
et al., 2007) a 4-level tracking method inspired by the
human visual attention model is proposed: the con-
sidered levels are peripheral tracker, vision tunnels,
scene description layer and stationary object layer.
An object is considered stationary if its dwell time
within the same region exceeds a given threshold,
chosen by the human operator during the configu-
∗
IAPR Fellow
ration step. In (Bhargava et al., 2007) the authors
propose a backtracking approach to detect abandoned
luggage in crowded scenes. The attention is not only
focused on baggage, but also on the owner: in fact,
the system detects a stopped bag and performs back-
tracking to keep track of the owner, generating an
alarm only if he does not retrieve the luggage within
60 seconds. The joint analysis of the bag and its
owner is also exploited in (Acampora et al., 2012),
where moving objects trajectories are analyzed by a
Time Delay Neural Network and a decision about the
event of interest is taken by exploiting a set of man-
ually defined fuzzy rules. In (Bevilacqua and Vac-
cari, 2007) the authors focus on the problem of sta-
tionary vehicles detection, by proposing a tracking al-
gorithm based on corner point detection. Occlusions
are solved with a SOM neural network and the tra-
jectories are smoothed with a moving average, so as
to partially eliminate noise caused by tracking algo-
rithms and to facilitate stopped delay measurement:
for each vehicle, its trajectory is analyzed; if it is sta-
ble in a certain region and for a long time interval,
then it is considered stopped.
The above mentioned algorithms are very intu-
itive and achieve a very high performance in ster-
ile environments, where only a few people populate
the scene. However, their main limitation lies in the
fact that they cannot be effectively used in crowded
scenes: in fact, they are very sensitive to occlusions,
which usually prevent the system from tracking ob-
385
Foggia P., Greco A., Saggese A. and Vento M..
A Method for Detecting Long Term Left Baggage based on Heat Map.
DOI: 10.5220/0005306803850391
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 385-391
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

jects and then from extracting trajectories in a reli-
able way. On the other hand, methods based on back-
ground subtraction are able to overcome such limi-
tation and in general to achieve better performance.
This is due to the fact that these methods perform a
temporal analysis of foreground objects by sophisti-
cated background modeling strategies, and thus com-
mon problems such as occlusions cannot influence the
performance of this kind of systems.
For instance, the authors in (Maddalena and Pet-
rosino, 2013) propose a general framework, called
stopped foreground subtraction (SFS), that is inde-
pendent of the specific background modeling and
foreground extraction methods: in fact, they created
a model of the stopped objects and use it to clas-
sify a new stationary one. Furthermore, they propose
a background updating method based on neural net-
works, called 3DSOBS, which proved its effective-
ness if compared with the traditional MOG (Stauf-
fer and Grimson, 1999). In (Porikli et al., 2008) the
algorithm maintains two different backgrounds, up-
dated with different speeds by using the traditional
MOG: a short term and a long term one. Thus, an ev-
idence image is computed by considering the pixels
whose change rate ranges between the short term and
the long term background updating rate; this image
is finally used to detect stopped objects. The method
proposed in (Boragno et al., 2007) is developed on
the Ipsotek VI platform and is able to detect vehicles
parked in prohibited areas. The algorithm is based
on 3 steps: motion detection through block matching,
stopped object detection using MOG and object clas-
sification into trucks, cars, pedestrians and packages.
Starting from the spatio-temporal information ob-
tained from the background analysis, several methods
also include a tracking phase in order to extract more
useful information about the objects in the scene, so
as to increase the detection capabilities of the system
as well as to decrease their false alarm rate. Such al-
gorithms are usually referred to as hybrid approaches
For instance in (Smitha and Palanisamy, 2012) a
parked vehicles detection algorithm is described; it
uses a simple background subtraction technique and
a region-based tracking to identify the stop of a ve-
hicle. The method proposed in (Singh et al., 2009)
is based on a dual background subtraction technique
to detect stationary objects and on a tracking algo-
rithm, optimized to solve occlusions, able to reduce
the number of false positives introduced by the pure
background subtraction approach. In fact, the sys-
tem raises an alarm only if the object hit count ex-
ceeds a given threshold, i.e. if it remains stationary
for a certain time interval. In (Venetianer et al., 2007)
the authors propose a method for abandoned objects
or stopped vehicles detection developed on the Ob-
jectVideo commercial platform. The algorithm con-
sists of 4 steps: background subtraction, blob detec-
tion, tracking and stopped object detection. The last
step is performed bringing almost immediately the
stationary object in the background and retaining the
original background: the temporal evolution of the
comparison between the current frame and the orig-
inal background is used to detect the event of interest.
A more sophisticated approach is proposed in (Tian
et al., 2011), which performs stopped object detection
through 4 steps: MOG-based background subtraction,
abandoned and removed object classification, object
classification (human, vehicle, package) and tracking.
In (Albiol et al., 2011) the authors propose a
parked vehicle detection algorithm, based on corner
detection, which creates a set of spatiotemporal maps,
used to understand what is happening in the scene and
to extract information such as the number of available
stalls, the number of parked vehicles in prohibited ar-
eas, the mean stopping times, the queue length and so
on.
The analysis of the literature performed up to now
makes it evident that the most successful methods are
those able to provide an accurate background sub-
traction. However, in order to achieve a good per-
formance, it is advisable to use a tracking algorithm,
possibly robust to occlusions, in order to evaluate the
movement of an object in the scene in a more sophisti-
cated way. Starting from these considerations, in this
paper we propose a hybrid solution that involves the
use of a novel background updating technique based
on a spatio-temporal analysis and of a tracking algo-
rithm based on objects similarity evaluation (Di Las-
cio et al., 2012)(Foggia et al., 2013). The background
image is modeled using adaptive selective updating,
whose adaptive weights depend on the time spent by
the particular pixel inside the scene. In particular,
we generate a grayscale heat map, where the inten-
sity of each pixel grows proportionally with its persis-
tence time in the foreground mask. The main idea is
that pixels corresponding to objects crossing the scene
have not to influence the background, and thus their
updating weight should be very low. On the contrary,
pixels belonging to objects stopped in the scene for a
long time should enter the background in a very fast
way, so their updating rate should be very high.
Furthermore, differently from traditional methods,
the tracking is performed on the heat map instead of
the foreground mask, so as to make the proposed ap-
proach insensitive to occlusion problems; indeed, any
persons who temporarily exclude a left object from
the camera view can not accumulate a sufficient dwell
time to enter the heat map and thus is not tracked by
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
386
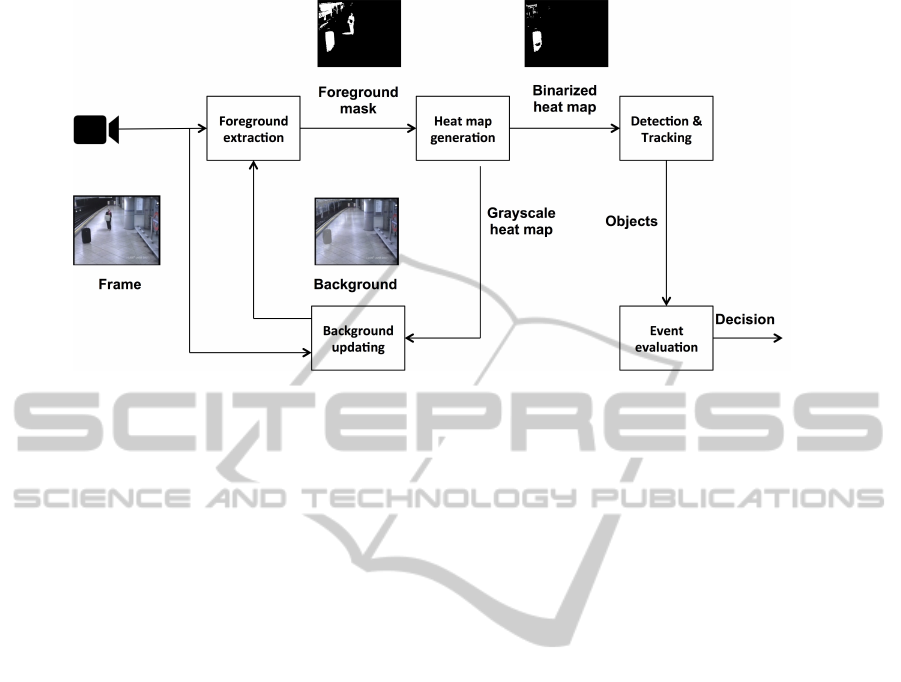
Figure 1: Overview of the proposed approach: once it has extracted the foreground mask and generated the heat map, the
system keeps track of each abandoned object and raises an alarm if its dwell time exceeds a threshold.
the system. In this way, the proposed algorithms is
able to detect abandoned objects by keeping track of
those having a stopping time greater than a fixed time,
chosen by the human operator during the configura-
tion step.
2 THE PROPOSED METHOD
An overview of the proposed approach is shown in
Figure 1. The pixels corresponding to moving objects
are extracted (Foreground extraction) and are used to
update the heat map (Heat map generation), so that
the longer a pixel remains in the foreground mask,
the brighter it appears in the heat map. The heat map
and the foreground mask are used by the background
updating module, which adjusts foreground pixels up-
dating weights according to the corresponding inten-
sity on the heat map; thus, an object enters slowly the
background when its intensity is low but, gradually,
it enters faster if its persistence time increases. Note
that such strategy allows the system to easily discard
spurious objects due to the detection step as well as
persons that do not stop in the scene and that do not
need to be further analyzed. Finally, the system per-
forms on the heat map the detection and the tracking:
if an object is found and it stops for a long time in the
scene, then the system will raise an alarm.
2.1 Heat Map Generation
The objects moving in the scene at the current frame
t are encoded by the so called foreground mask (see
Figure 2(c)), obtained by traditional background sub-
traction algorithms.
Let be D
t
(x, y) the distance between the the cur-
rent image I
t
and the background updated up to the
previous frame B
t−1
in the generic pixel (x,y):
D
t
(x, y) = |I
t
(x, y) − B
t−1
(x, y)| (1)
The foreground mask can be computed as follows:
F
t
(x, y) =
(
1 i f D
t
(x, y) ≥ τ
f m
0 otherwise
(2)
being in our experiments τ
f m
set to 25.
Note that F
t
does not encode any information
about the temporal variation, that is in this kind of
applications a very important and not negligible fea-
ture. For this reason, we also introduce an heat map
H
t
, able to encode in a single image a temporal analy-
sis (see Figure 2(d)). In more details, the heat map is
a grayscale image whose generic pixel is updated by
a weighted moving average:
H
t
(x, y) = α · F
t
(x, y) + (1 − α) · H
t−1
(x, y), (3)
where α is the heat map updating weight, whose value
depends on the latency time chosen by the user dur-
ing the configuration step. In this way, we are able
to obtain a kind of transparency overlay of F
t
on H
t
.
Starting from H
t
, its binarized version H
bin
t
is com-
puted:
H
bin
t
(x, y) =
(
1 i f H
t
(x, y) ≥ τ
hm
0 otherwise
(4)
Thus, the system can start verifying if an object is
abandoned only once he has entered into H
bin
t
, so sig-
nificantly reducing the computational effort required
by the successive detection and tracking steps.
AMethodforDetectingLongTermLeftBaggagebasedonHeatMap
387

(a) (b)
(c) (d)
(e) (f)
Figure 2: An example of the different modules involved in
the stopped object detection: (a) current frame, (b) back-
ground, (c) foreground mask, (d) heat map, (e) binarized
heat map, (f) detected objects overlaid on the current frame.
Note that the event has been detected, so the object can start
entering the background.
2.2 Background Updating
One of the main contributions of the proposed ap-
proach pertains to the definition of a novel back-
ground subtraction algorithm. In fact, traditionally
the background is only updated by evaluating the
foreground mask at the current frame. On the other
hand, our aim is to control the entering time of the
objects moving in the scene depending on their mo-
tion, and then on their history. The key idea is that
the lower is the time spent in the scene by an object,
the higher is the time required for updating the back-
ground.In order to achieve this aim, we decided to se-
lectively update the background depending on both
the heat map and the foreground mask. In fact, the
weights for pixels corresponding to moving objects
are dynamically updated, depending on the time spent
by the object in that particular position.
In particular, let H
s
t
be the static heat map, that
is the heat map evaluated only on the pixels corre-
sponding to moving objects at the current frame and
computed as follows:
H
s
t
(x, y) = H
t
(x, y) · F
t
(x, y) (5)
Starting from H
s
t
, we can evaluate the background
B
t
as follows:
B
t
(x, y) =
α
B
· I
t
(x, y) + α
B
· B
t−1
i f H
s
t
(x, y) = 0
α
F
(x, y) · I
t
(x, y) + α
F
(x, y) · B
t−1
otherwise
(6)
being α
F
(x, y) = 1 − α
F
(x, y). α
B
and α
F
(x, y) rep-
resent the updating weights for the background and
for the foreground pixels, respectively. Note that α
F
is not fixed, but instead it depends on the particular
pixel (x, y). In fact, it is related to the corresponding
intensity value on the heat map:
α
F
(x, y) = α
H
· H
s
t
(x, y) (7)
As for the α values, they strongly depend on the mini-
mum dwell time chosen by the human operator during
the configuration step. In particular, we consider that
a stopped object has to enter the background as soon
as the related event is detected.
2.3 Event Evaluation
Differently from other state of the art approaches, the
detection of connected components and the tracking
of the objects is performed directly on the binarized
heat map. In particular, the tracking algorithm pro-
posed in (Di Lascio et al., 2013) has been used for
our experimentations. The main advantage deriving
from the choice lies in the fact that only those ob-
jects stopped for a long time are involved in the track-
ing process, so making the system particularly robust
with respect to occlusions as well as especially suited
for working in real and crowded environments.
Objects are finally analyzed and their permanence
time in the heat map is properly evaluated. Once an
event of interest has been detected, an alarm is raised
to the human operator.
3 EXPERIMENTAL RESULTS
The proposed approach has been tested over two
standard and widely adopted datasets, namely the
CAVIAR Dataset (CAVIAR, 2003) and the Imagery
Library for Intelligent Detection Systems Abandoned
Baggage Dataset (i LIDS, 2007).
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
388

(a) (b)
(c) (d)
Figure 3: A few images extracted from the datasets used for
testing the proposed approach: CAVIAR (a,b) and i-LIDS
(c,d). On the left (a,c) the regions of interest are overlaid.
The former is composed by 26 videos acquired in
an indoor environment and showing different scenar-
ios: in particular, 5 videos contain a left bag event,
while the remaining 21 contain other situations typ-
ically occurring in real scenarios, such as a person
walking alone, people meeting with others, fighting
and so on. In this way, the proposed approach can
be evaluated not only in terms of events correctly rec-
ognized, but also in terms of situations wrongly rec-
ognized as left bag events (false positive). The res-
olution is half-resolution PAL standard (384x288, 25
fps) and compressed using MPEG2; the total video
sequence duration is about 17 minutes.
The i-LIDS Abandoned Baggage dataset (here-
inafter i-LIDS) consists of 3 video with different dif-
ficulty levels, namely easy, medium and hard. It has
been used during i-LIDS bag and vehicle detection
challenge, hosted by AVSS 2007. Each video has a
resolution of 720x570 and has been acquired at 25
fps; the total length of the videos is about 10 minutes.
The scene captured by the camera shows a railway
where a person leaves a baggage unattended for 60
seconds. According to the competition rules, the de-
tection area can be divided into 3 zones (near, mid and
far), so as to set different parameters depending on the
distance from the baggage.
A few examples for both the datasets are shown
in Figure 3, while the obtained results are reported
in Tables 1 and 2 for CAVIAR and i-LIDS datasets,
respectively.
In particular, as for the CAVIAR dataset, the re-
sults for each typology of event is reported; the ta-
ble can be read as follows: TD indicates that a left
bag event has been correctly detected (true detected),
Table 1: Results obtained on the CAVIAR dataset, in terms
of True Detected (TD) and False Detected (FD).
CAVIAR Dataset
Video TD FD
Left Bag
Left Bag 1/1 0
Left Bag At Chair 1/1 0
Left Bag Behind Chair 0/1 0
Left Bag Picked Up 1/1 0
Left Box 1/1 0
Walk
Walk 1 - 1
Walk 2 - 0
Walk 3 - 0
Browse
Browse 1 - 0
Browse 2 - 2
Browse 3 - 0
Browse 4 - 0
Browse While Waiting 1 - 0
Browse While Waiting 2 - 0
Rest
Rest Fall On Floor - 2
Rest In Chair - 0
Rest Slump On Floor - 1
Rest Wiggle On Floor - 3
Meet
Meet Crowd - 0
Meet Split 3rd Guy - 0
Meet Walk Split - 0
Meet Walk Together 1 - 0
Fight
Fight Chase - 2
Fight One Man Down - 3
Fight Run Away 1 - 0
Fight Run Away 2 - 0
while FD indicates that something in the scene has
been wrongly detected as a left bag event (false de-
tected). For instance, the first row can be read as
follows: in the Left Bag video, one event out of one
has been correctly recognized (so implying that there
are not missing events) and no false positives have
been detected. We can note that abandoned baggages
have been successfully detected in 4 videos out of
5 of the Left Bag dataset sequences, as also shown
in Figure 4; the missed event is due to the fact that
the bag is hidden behind the chair, so it is not pos-
sible with any traditional algorithm based on either
tracking or background subtraction methodologies to
discover this kind of event. We can also note that a
few false alarms have been detected, for instance in
the videos Fight One Man Down and Fight Chase. It
is mainly due to the fact that in such scenarios there
are people stopping on the wall for a very long time,
therefore the system raises an alarm since no informa-
tion about the typology of the objects is provided. It
is evident that the introduction of a classification step,
able to distinguish, for instance, bags from persons,
may avoid the generation of these errors. Note that
classification step is made possible in the proposed
approach by the tracking algorithm, which allows to
keep track of the objects and eventually of their re-
AMethodforDetectingLongTermLeftBaggagebasedonHeatMap
389
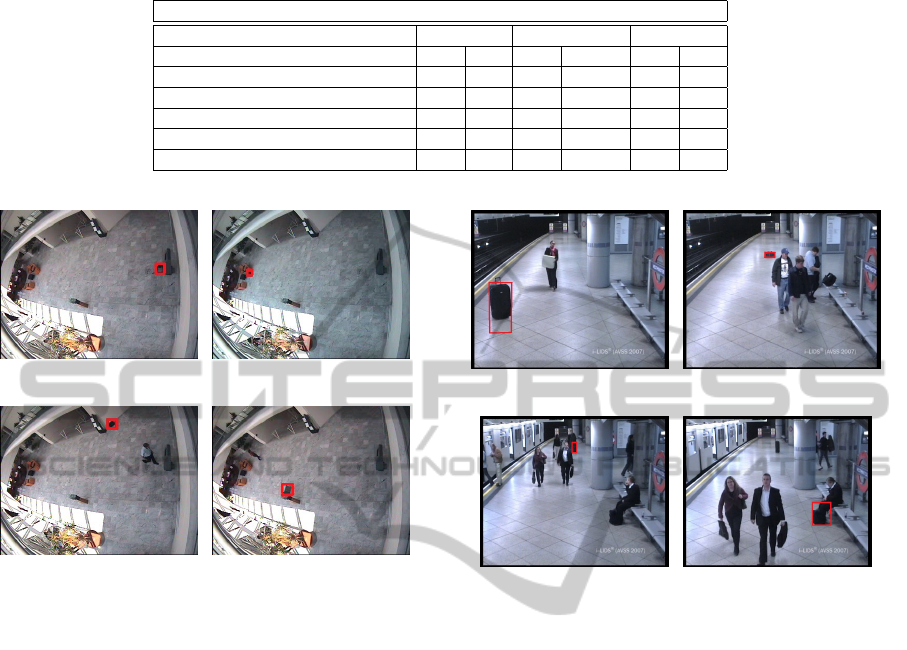
Table 2: Results obtained over the i-LIDS dataset and compared with state of the art approaches.
i-LIDS Abandoned Baggage
AB Easy AB Medium AB Hard
Method TD FD TD FD TD FD
Proposed method 1/1 0 1/1 0 1/1 1
(Maddalena and Petrosino, 2013) 1/1 0 1/1 0 1/1 1
(Evangelio et al., 2011) 1/1 0 1/1 5 1/1 6
(Pan et al., 2011) 1/1 0 1/1 0 1/1 0
(Tian et al., 2011) 1/1 0 1/1 0 1/1 1
(a) (b)
(c) (d)
Figure 4: The baggage found in the CAVIAR dataset over
the videos (a) Left Bag, (b) Left Bag At Chair, (c) Left Bag
Picked Up and (d) Left Box.
lated properties, such as the class it belongs to.
As for the i-LIDS dataset, the obtained results are
shown in the first row of Table 2. We can note that
the event of interest is recognized in all the videos
(Easy, Medium and Hard) and only one false positive
has been detected in the Hard videos. Figures 5(a-c)
show the detected event. It is worth noting that the
baggage in the Hard sequence has been correctly de-
tected (Figure 5(c)) although the occlusion occurring
in the previous frames. On the other hand, Figure 5(d)
shows the false positive detected by the system, due to
the stopped legs of the person sitting on the bench. As
said for the CAVIAR dataset, also in this case the in-
troduction of a classification step would make it pos-
sible to distinguish bags from non bags objects. In
order to further confirm the effectiveness of the pro-
posed approach, a proper comparison with state of the
art methods has been carried out. As shown in Table
2, the achieved results are comparable both in terms
of true detected and false detected. Not that the only
method which does not detect any events of interest is
proposed by (Pan et al., 2011): it is due to the fact that
it includes a post processing step in order to analyze
(a) (b)
(c) (d)
Figure 5: The baggages identified in the i-LIDS dataset in
videos (a) AB Easy, (b) AB Medium and (c) AB Hard. In
(d) the false detected object is reported.
the detected events of interest and further reduce the
number of false positives arisen by the system.
4 CONCLUSIONS
In this paper we proposed a novel approach based on
an advanced background subtraction algorithm for de-
tecting stopped objects in crowded environments. The
experimentation has been conducted over two stan-
dard datasets, namely the CAVIAR and the i-LIDS
datasets, and the obtained results, compared with state
of the art approaches, confirm that the system is able
to reliably detect the events also in presence of oc-
cluding objects, typically affecting this kind of algo-
rithms. Furthermore, the high recognition rate is not
paid in terms of false positives generated by the sys-
tem, that are still low even if compared with state of
the art approaches. Future works include the possibil-
ity to apply a classification algorithm to the detected
objects stopped in the scene for a long time, so as to
distinguish between persons and inanimate objects;
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
390

this would make possible a further reduction of the
number of false positives detected by the system and
thus would improve the usability for a human opera-
tor.
ACKNOWLEDGEMENTS
This research has been partially supported by
A.I.Tech s.r.l. (http://www.aitech-solutions.eu).
REFERENCES
Acampora, G., Foggia, P., Saggese, A., and Vento, M.
(2012). Combining Neural Networks and Fuzzy Sys-
tems for Human Behavior Understanding. 2012 IEEE
Ninth International Conference on Advanced Video
and Signal-Based Surveillance, pages 88–93.
Albiol, A., Sanchis, L., and Mossi, J. M. (2011). Detection
of parked vehicles using spatiotemporal maps. Intel-
ligent Transportation Systems, IEEE Transactions on,
12(4):1277–1291.
Bevilacqua, A. and Vaccari, S. (2007). Real time detec-
tion of stopped vehicles in traffic scenes. In Advanced
Video and Signal Based Surveillance, 2007. AVSS
2007. IEEE Conference on, pages 266–270. IEEE.
Bhargava, M., Chen, C.-C., Ryoo, M. S., and Aggarwal,
J. K. (2007). Detection of abandoned objects in
crowded environments. In IEEE AVSS, pages 271–
276. IEEE.
Boragno, S., Boghossian, B., Black, J., Makris, D., and Ve-
lastin, S. (2007). A dsp-based system for the detection
of vehicles parked in prohibited areas. In Advanced
Video and Signal Based Surveillance, 2007. AVSS
2007. IEEE Conference on, pages 260–265. IEEE.
CAVIAR (2003). Caviar test case scenarios. http://groups.
inf.ed.ac.uk/vision/CAVIAR/CAVIARDATA1/.
Di Lascio, R., Foggia, P., Percannella, G., Saggese, A., and
Vento, M. (2013). A real time algorithm for people
tracking using contextual reasoning. Computer Vision
and Image Understanding, 117(8):892–908.
Di Lascio, R., Foggia, P., Saggese, A., and Vento, M.
(2012). Tracking interacting objects in complex sit-
uations by using contextual reasoning. In VISAPP (2),
pages 104–113.
Evangelio, R. H., Patzold, M., and Sikora, T. (2011). A
system for automatic and interactive detection of static
objects. In Person-Oriented Vision (POV), 2011 IEEE
Workshop on, pages 27–32. IEEE.
Foggia, P., Percannella, G., Saggese, A., and Vento, M.
(2013). Real-time tracking of single people and
groups simultaneously by contextual graph-based rea-
soning dealing complex occlusions. In Performance
Evaluation of Tracking and Surveillance (PETS),
2013 IEEE International Workshop on, pages 29–36.
Guler, S., Silverstein, J. A., and Pushee, I. H. (2007). Sta-
tionary objects in multiple object tracking. In Ad-
vanced Video and Signal Based Surveillance, 2007.
AVSS 2007. IEEE Conference on, pages 248–253.
IEEE.
i LIDS (2007). Abandoned baggage dataset. ftp://motinas.
elec.qmul.ac.uk/pub/iLids/.
Maddalena, L. and Petrosino, A. (2013). Stopped object de-
tection by learning foreground model in videos. IEEE
transactions on neural networks and learning systems,
24(5):723–735.
Pan, J., Fan, Q., and Pankanti, S. (2011). Robust abandoned
object detection using region-level analysis. In Im-
age Processing (ICIP), 2011 18th IEEE International
Conference on, pages 3597–3600. IEEE.
Porikli, F., Ivanov, Y., and Haga, T. (2008). Robust
abandoned object detection using dual foregrounds.
EURASIP Journal on Advances in Signal Processing,
2008:30.
Singh, A., Sawan, S., Hanmandlu, M., Madasu, V. K., and
Lovell, B. C. (2009). An abandoned object detec-
tion system based on dual background segmentation.
In Advanced Video and Signal Based Surveillance,
2009. AVSS’09. Sixth IEEE International Conference
on, pages 352–357. IEEE.
Smitha, H. and Palanisamy, V. (2012). Detection of station-
ary foreground objects in region of interest from traffic
video sequences. International Journal of Computer
Science Issues, 9(2):194–199.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive
background mixture models for real-time tracking.
In Computer Vision and Pattern Recognition, 1999.
IEEE Computer Society Conference on., volume 2.
IEEE.
Tian, Y., Feris, R. S., Liu, H., Hampapur, A., and Sun, M.-T.
(2011). Robust detection of abandoned and removed
objects in complex surveillance videos. Systems, Man,
and Cybernetics, Part C: Applications and Reviews,
IEEE Transactions on, 41(5):565–576.
Venetianer, P. L., Zhang, Z., Yin, W., and Lipton, A. J.
(2007). Stationary target detection using the ob-
jectvideo surveillance system. In Advanced Video and
Signal Based Surveillance, 2007. AVSS 2007. IEEE
Conference on, pages 242–247. IEEE.
AMethodforDetectingLongTermLeftBaggagebasedonHeatMap
391
