
Fast and Accurate Refinement Method for 3D Reconstruction from
Stereo Spherical Images
Marek Solony
1
, Evren Imre
2
, Viorela Ila
1
, Lukas Polok
1
, Hansung Kim
2
and Pavel Zemcik
1
1
Faculty of Information Technology, Brno University of Technology, Brno, Czech Republic
2
Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, U.K.
Keywords:
Spherical Images Registration, 3D Reconstruction, Graph Optimisation, SLAM.
Abstract:
Realistic 3D models of the environment are beneficial in many fields, from natural or man-made structure
inspection and volumetric analysis, to movie-making, in particular, special effects integration to natural scenes.
Spherical cameras are becoming popular in environment modelling because they capture the full surrounding
scene visible from the camera location as a consistent seamless image at once. In this paper, we propose
a novel pipeline to obtain fast and accurate 3D reconstructions from spherical images. In order to have a
better estimation of the structure, the system integrates a joint camera pose and structure refinement step.
This strategy proves to be much faster, yet equally accurate, when compared to the conventional method,
registration of a dense point cloud via iterative closest point (ICP). Both methods require an initial estimate for
successful convergence. The initial positions of the 3D points are obtained from stereo processing of pair of
spherical images with known baseline. The initial positions of the cameras are obtained from a robust wide-
baseline matching procedure. The performance and accuracy of the 3D reconstruction pipeline is analysed
through extensive tests on several indoor and outdoor datasets.
1 INTRODUCTION
Nowadays, there is a large interest in recreating the
3D environment from images coming either from still
or moving cameras, in stereo or monocular setups.
Well-known applications such as Photo Tourism can
reconstruct tourist places from thousands of internet
images; Google’s 3D maps application can recon-
struct entire cities from aerial and satellite images.
Due to the limited field of view of the conven-
tional cameras a large number of images needs to
be acquired in order to reconstruct outdoor or indoor
scenes. In applications involving large scenes, an ac-
ceptable coverage with still images can be a problem
due to both, time consuming acquisition process as
well as large memory requirements. One solution to
this is to use spherical cameras which cover 360
◦
of
the space. Only few such images are needed to create
a dense reconstruction of a large scene.
In this paper, we introduce a novel spherical im-
age processing pipeline to obtain fast and accurate 3D
reconstructions of a scene. The advantage of this sys-
tem is that it can recreate relatively large outdoor or
indoor scenes from only a handful of spherical im-
ages. In order to obtain a dense 3D reconstruction,
stereo pairs of spherical images are considered. Ac-
quiring stereo pairs is in general a simple task, since
most of the spherical imaging systems are placed on a
tripod which allows an exact adjustment of the height
of the camera, without introducing any rotations.
The processing pipeline has two parts; a) an ini-
tialisation step and b) a structure and camera pose
refinement step. The initial positions of the 3D
points are obtained from a stereo processing frame-
work which produces an accurate disparity map from
stereo spherical image pairs with known baseline. To
obtain accurate depth from stereo pairs, dense dis-
parity maps are estimated using a multi-resolution
partial differential equation (PDE) (Kim and Hilton,
2013) based stereo matching algorithm which accel-
erates the calculation for large images whilst keeping
smooth surface and sharp object boundaries. The ini-
tial positions of the cameras are obtained from a ro-
bust wide-baseline matching procedure. The wide-
baseline nature of the problem necessitates the use
of robust estimators, such as RANSAC. Our geom-
etry estimation pipeline is an implementation of the
guided matching algorithm of (Hartley and Zisser-
man, 2003). It iterates over successive stages of
matching and RANSAC-based geometry estimation.
575
Solony M., Imre E., Ila V., Polok L., Kim H. and Zemcik P..
Fast and Accurate Refinement Method for 3D Reconstruction from Stereo Spherical Images.
DOI: 10.5220/0005310805750583
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 575-583
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

The initialisation is further used to either register
consecutive dense point clouds using Iterative Closest
Point (ICP) (Kim and Hilton, 2013) algorithms or to
perform joint pose and structure refinement. The ICP
algorithm is widely used for geometric registration of
three dimensional point clouds when an initial esti-
mate of the relative pose is known (Besl and McKay,
1992; Rusinkiewicz and Levoy, 2001). ICP simply
finds a 3D rigid transformation matrix to minimize
the distance of the closest points between two point
clouds. It suffers from local minimum problem if the
initialisation is not close enough to the true solution.
On the other hand, the nonlinear structure refine-
ment is based on joint optimisation of sparse 3D
points and camera poses. The problem is formulated
as a nonlinear optimisation on graphs (Dellaert and
Kaess, 2006; K
¨
ummerle et al., 2011), where the nodes
are the 3D points and the 3D camera poses and the
edges are the relative point-camera transformations
(see section 4). The optimisation problem finds the
best cameras-points configuration, given the impre-
cise relative positions of the 3D points obtained from
the initialisation step. Section 5 analyses the time and
performance of both approaches, the ICP based regis-
tration and the proposed refinement method.
2 RELATED WORK
Building a representation of the environment from
noisy sensorial data is a central problem in com-
puter vision and robotics. Problems in computer
vision include bundle adjustment (BA) (Agarwal
et al., 2009) and structure from motion (SFM) (Beall
et al., 2010). Simultaneous localization and map-
ping (SLAM) (Dellaert and Kaess, 2006; Kaess et al.,
2008; K
¨
ummerle et al., 2011) is a similar problem in
robotics. Those are mathematically equivalent tech-
niques, with a slight difference in the types of con-
straints: while BA minimizes the reprojection error,
SLAM minimizes the residual directly in the repre-
sentation space. The key to developing fast methods
in this direction is the interpretation of the problem
in terms of graphical models. Understanding the ex-
isting graphical model inference algorithms and their
connection to matrix factorization methods from lin-
ear algebra allowed computationally efficient solu-
tions (Dellaert and Kaess, 2006; Snavely et al., 2006;
K
¨
ummerle et al., 2011; Polok et al., 2013a).
For the particular problem of 3D reconstruction
from stereo spherical images, minimizing the repro-
jection error in the image space may not be the
best approach. This is due to the fact that in the
spherical images, the reprojection error, which is the
distance between measured and estimated 2D point,
varies with the latitude of unwrapped spherical image.
Therefore, a more correct approach is to optimize di-
rectly in the representation space applying SLAM op-
timisation methods.
While the BA approaches use sets of still im-
ages from unrelated viewpoints and possibly different
cameras with different parameters, SfM uses video
sequences from a moving camera to reconstruct a
3D model of the observed environment. The dis-
advantage of both, is the great number of images
needed to cover large areas. A common way to cap-
ture the full 3D space is to use a catadioptric om-
nidirectional camera using a mirror combined with
a charge-coupled device (CCD) (Hong et al., 1991;
Nayar, 1997). Lhuillier proposed a scene reconstruc-
tion system using omnidirectional images (Lhuillier,
2008). However, catadioptric omnidirectional cam-
eras have a large number of systematic parameters to
calibrate. Another problem is the limited resolution
because they use only one CCD to capture the full
3D space. Feldman and Weinshall used a Cross Slits
(X-Slits) projection with a rotating fisheye camera to
acquire high quality spherical images while reduc-
ing the number of camera parameters and to generate
distortion-free image-based rendering (Feldman and
Weinshall, 2005). Kim and Hilton used this spherical
imaging to acquire multiple pairs of high-resolution
stereo spherical images and reconstructed full 3D ge-
ometry of the scene (Kim and Hilton, 2013). Note that
using omnidirectional or wide field of view cameras
decreases the ratio of the number of cameras to the
number of observed points, as opposed to the tradi-
tional cameras. As will be shown later, this is benefi-
cial for efficient optimisation, as the resulting system
matrix sparsity patterns are favourable for solving us-
ing Schur complement (Zhang, 2005).
3 SPHERICAL IMAGE
PROCESSING
Using stereo spherical images from one or multiple
view-points is an easy and feasible way to create 3D
models of large environments. To obtain a 3D struc-
ture from stereo spherical images, image processing
algorithms are applied followed by a structure refin-
ing procedure. This section describes an image pro-
cessing pipeline which inputs spherical images and
outputs an initial estimation for the refining step.
3.1 Spherical Images
A spherical image is captured by a vertical line-scan
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
576

camera with wide-angle lens rotating around the cen-
tre of projection. The final image is created by joining
scans into a single image so it covers 360
◦
in horizon-
tal and ≈ 180
◦
in vertical field of view. This process is
equivalent to projecting the scene around the camera
onto a unit sphere and unwrapping it into a plane.
Compared to the images from conventional cam-
eras, the spherical images contain more information
in a single image and therefore more features can
be extracted for the purpose of estimating the rela-
tions between cameras. The main disadvantage of
the spherical images is the distortion introduced by
the wide-angle lenses and the rotating camera sen-
sor. The same parts of the scene viewed from dif-
ferent positions of the camera, appear very different
(see Fig. 1 b)). This can cause problems when ex-
tracting and matching features, especially when the
images are captured with wide baseline.
3.2 Stereo Processing
A stereo image pair with vertical disparity can be
obtained by placing the spherical camera at differ-
ent heights. Assuming that the images are precisely
aligned, the stereo-matching problem can be reduced
to a one-dimensional search on a line. The disparity
map is computed by processing all the columns of the
stereo image pair, and therefore the 3D position of any
valid 2D point can be obtained through a simple tri-
angulation. If pixels on the column are mapped to the
[0,π] range in the spherical coordinate, the disparity
d between projection points p
t
(x
t
,y
t
) and p
b
(x
b
,y
b
)
of a 3D point P to the stereo image pair I
t
and I
b
is
defined as the difference of the vertical angles of the
projected points θ
t
and θ
b
as in:
d(p
t
) = θ
t
− θ
b
. (1)
The depth D
t
(the distance between the top camera
and the 3D point P) can be calculated by triangulation
as in Eq. (2) using the baseline distance B in addition
to the angular disparity.
D
t
(p
t
) = B/
sinθ
t
tan(θ
t
+ d(p
t
))
− cosθ
t
(2)
A number of studies have been reported on the dispar-
ity estimation problem since the 1970 (Scharstein and
Szeliski, 2002). Any disparity estimation algorithm
can be used for our system as long as it produces accu-
rate and dense disparity. Most disparity estimation al-
gorithms solve the correspondence problem on a dis-
crete domain such as integer or half-pixel levels which
are not sufficient to recover a smooth surface. Espe-
cially spherical stereo image pairs can show more se-
rious artefacts in the reconstruction because they have
a serious radial distortion. A variational approach
which theoretically works on a continuous domain
can be a solution for accurate floating-point disparity
estimation. We use a PDE-based variational dispar-
ity estimation method to generate accurate disparity
fields with sharp depth discontinuities for surface re-
construction (Kim and Hilton, 2013).
3.3 Feature and Descriptors Extraction
The estimation of the relative pose between two
spherical cameras requires a set of reliable 3D point
correspondences. 3D features from each camera are
selected by detecting 2D SIFT features on the spher-
ical images, and computing the associated 3D coor-
dinates, by projecting them to the 3D space via the
computed depth map (section 3.2). Each 3D point is
characterised by the 2D SIFT descriptor of its cor-
responding 2D feature on the spherical image (
˙
Imre
et al., 2010). This process generates a sparse 3D point
cloud for each camera and its corresponding descrip-
tor as input to the initial pose estimation stage.
3.4 Computation of the Initial Pose
Estimate
The computation of the initial pose estimate follows
the conventional guided matching pipeline, which in-
volves alternating stages of feature matching and ge-
ometry estimation (Hartley and Zisserman, 2003).
The pipeline requires two sets of 3D features as in-
put. It returns H
i
, the initial 3D pose estimate, and I ,
the 3D correspondences supporting H
i
.
The feature matching stage seeks for nearest
neighbours, by comparing the associated SIFT de-
scriptors (Lowe, 2004). However, the pipeline often
operates under wide-baseline conditions, which sig-
nificantly reduces the number of viable matchings.
Therefore, the implementation resorts to a compro-
mise between ambiguity and quantity, and considers
the 7 nearest neighbours, instead of the best. Each
candidate is verified for reciprocity, i.e. whether the
points are in each other’s neighbourhoods. Exces-
sively ambiguous matches are rejected by truncating
the neighbourhoods so that, the ratio of the similarity
scores for the worst candidate within the neighbour-
hood and the best candidate without is above a thresh-
old. The remaining correspondences are ranked by
the MR-Rayleigh metric (V.Fragoso and Turk, 2013).
The wide-baseline nature of the problem and the
multiple-element neighbourhoods imply a correspon-
dence set with many outliers. In geometry estima-
tion, such problems are typically solved by the help of
FastandAccurateRefinementMethodfor3DReconstructionfromStereoSphericalImages
577

RANSAC (Fischler and Bolles, 1981). RANSAC ap-
plies a hypothesise-and-test framework on small, ran-
domly selected sets of correspondences, in its search
for a set without any outliers.
For pose estimation, we generate the hypothe-
ses via (Horn, 1987), which requires 3-element sam-
ples. Our RANSAC implementation minimises the
symmetric transfer error (Hartley and Zisserman,
2003). It makes use of MSAC (Torr and Zisser-
man, 2000), LO-RANSAC (Chum et al., 2003), bi-
ased sampling (Chum and Matas, 2005) and Wald-
SAC (Chum and Matas, 2008). MSAC and LO-
RANSAC improves the estimate accuracy, through
better hypothesis assessment, and a local optimisa-
tion step to improve promising hypotheses, respec-
tively. Biased sampling steers the hypothesis gener-
ation towards samples with a better likelihood of be-
ing inliers (as indicated by the correspondence rank-
ing). WaldSAC allows the rejection of poor hypothe-
ses without testing the entire correspondence set, and
therefore, provides significant computational savings.
RANSAC terminates when it is confident that a better
solution is unlikely (Chum and Matas, 2008), return-
ing H
i
and I .
3.5 Iterative Closest Point for 3D Point
Cloud Registration
One way to obtain a 3D dense reconstruction from
spherical stereo images is to use the camera pose esti-
mation from the previous step as an initialisation of a
dense 3D point-cloud registration. The 3D points are
obtained from the depth map computed as in 3.2 and
they are registered using ICP algorithm.
The ICP algorithm has been widely adopted to
align two given point sets (Besl and McKay, 1992;
Rusinkiewicz and Levoy, 2001). It finds a rigid
3D transformation (rotation R and translation t) be-
tween two overlapping clouds of points by iteratively
minimising squared-error of registration between the
nearest points from one set to the other:
E
R
(R,t) =
N
m
∑
i
N
d
∑
j
w
i, j
km
i
− (Rd
j
+t)k
2
(3)
where N
m
and N
d
are the number of points in the
model set m and reference set d, respectively, and w
i, j
are the weights for a point match.
In each ICP iteration, the rigid 3D transforma-
tion can be efficiently calculated by either singular
value decomposition (SVD) (Arun et al., 1987) or
the closed-form solution (Horn, 1987). The closed-
form solution solves the least-squares problem for
three or more points using a unit quaternion to repre-
sent rotation or using manipulation matrices and their
eigenvalues-eigenvector decomposition.
When applied to dense point cloud registration,
the ICP algorithm can become very slow. Therefore,
in this work, we propose a method which refines a
sparse structure and the camera poses, and creates
the dense reconstruction by referring the dense point-
clouds to the accurately estimated camera positions.
4 JOINT POSE AND STRUCTURE
REFINEMENT
In order to obtain an accurate 3D structure, the pro-
posed pipeline performs a joint optimisation of the
initial camera poses and the corresponding sparse
point clouds. The problem is formulated as a nonlin-
ear optimisation on graphs, where the vertices are the
absolute points and camera poses and the edges are
relative point-camera transformations obtained from
the depth map. Said differently, the vertices are the
variables to be estimated and the edges are the mea-
sured constraints. To obtain an optimal configuration
of the graph, we perform a maximum likelihood esti-
mation (MLE).
Under the assumption of zero-mean Gaussian
measurement noise, the MLE has a nonlinear least
squares (NLS) solution. The goal is to obtain the
MLE of a set of variables θ = [θ
1
...θ
n
], containing
the 3D points in the environment p = [p
1
... p
np
] and
the camera poses c = [c
1
...c
nc
], given the set of 3D
relative measurements, z = [z
1
...z
m
]:
θ
∗
= argmax
θ
P(θ | z) = argmin
θ
{
−log(P(θ | z)
}
(4)
This measurement can be modelled as a function
h
k
(c
i
, p
j
) of the camera c
i
and the point p
j
with zero-
mean Gaussian noise with the covariance Σ
k
:
P(z
k
| c
i
, p
j
) ∝ exp
−
1
2
k z
k
− h(c
i
, p
j
) k
2
Σ
k
, (5)
Finding the MLE from (4) is done by solving the fol-
lowing nonlinear least squares problem:
θ
∗
= argmin
θ
(
1
2
m
∑
k=1
z
k
− h(c
i
, p
j
)
2
Σ
k
)
. (6)
Iterative methods such as Gauss-Newton (GN) or
Levenberg-Marquard (LM) are used to find the solu-
tion of the NLS in (6). An iterative solver starts with
an initial point θ
0
and, at each step, computes a cor-
rection δ towards the solution. For small
k
δ
k
, a Taylor
series expansion leads to linear approximations in the
neighbourhood of θ
0
:
˜
e(θ
0
+ δ) ≈ e(θ
0
) + Jδ , (7)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
578

where e = [e
1
,...,e
m
]
>
is the set of all nonlinear er-
rors between the estimated and the actual measure-
ment, e
k
(c
i
, p
j
,z
k
) = z
k
− h(c
i
, p
j
), with [c
i
, p
j
] ⊆ θ
and J is the Jacobian matrix which gathers the deriva-
tive of the components of e. Thus, at each iteration i,
a linear LS problem is solved:
δ
∗
= argmin
δ
1
2
k
A δ − b
k
2
, (8)
where the A = Σ
−>\2
J(θ
i
) is the system matrix,
b = e(θ
i
) the right hand side (r.h.s.) and δ = (θ − θ
i
)
the correction to be calculated (Dellaert and Kaess,
2006). The the minimum is attained where the first
derivative cancels:
A
>
A δ = A
>
b or Λδ = η , (9)
with Λ = A
>
A, the square symmetric system matrix
and η = A
>
b, the right hand side. The solution to the
linear system can be obtained either by sparse ma-
trix factorization followed by backsubstitution or by
linear iterative methods. After computing δ, the new
linearisation point becomes θ
i+1
= θ
i
⊕ δ.
In our application the initial solution θ
0
can be rel-
atively far from the minimum, therefore LM is pre-
ferred over the GN methods. LM is based on ef-
ficient damping strategies which allow convergence
even from poor initial solutions. For that, LM solves
a slightly modified variant of (9), which involves a
damping factor λ:
(Λ + λ
¯
D)δ = η or Hδ = η , (10)
where
¯
D can be either the identity matrix,
¯
D = I, or
the diagonal of the matrix Λ,
¯
D = diag(Λ).
Schur complement is employed to solve the lin-
earised problem in (10). For that, the system matrix
is split in four blocks, according to the camera and
points variables:
C U
U
>
P
·
c
p
=
η
c
η
p
(11)
This is a common practice in solving 3D reconstruc-
tion problems, where the camera poses are linked only
through the points. It results in diagonal C and P ma-
trices, which can be easily inverted. If P is invertible,
the Schur complement of the block P is C −UP
−1
U
>
,
and is used to solve for the camera poses first. Points
are then obtained by solving the remaining system.
Performing matrix inversion and multiplication in
the Schur complement form brings reduction in com-
putational time, compared to performing Cholesky
factorisation of the whole system. To improve conver-
gence, after every iteration of the nonlinear solver, the
state of the cameras is fixed and three iterations opti-
mising only the points are performed. This is based
on the observation, that while a single camera may
depend on a large number of points, a single point is
usually only observed from two or three cameras, and
as such the positions of the points are harder to esti-
mate precisely. The extra iterations allow the points
to settle before performing the following nonlinear
solver iterations. In our experiments, the extra iter-
ations reduce residual as efficiently as the full non-
linear iterations, only at much smaller computational
cost. A similar technique was described in (Jeong
et al., 2012).
The result of the estimation is an optimised con-
figuration of the sparse 3D structure p and the camera
poses c. The dense structure is obtained by referring,
for each pixel, its 3D position from the depth map to
the optimised camera poses.
5 EVALUATIONS AND RESULTS
This section evaluates the automatic process of align-
ing multiple spherical cameras in the terms of accu-
racy and computation time.
5.1 Datasets
Multiple experiments were performed in order to
evaluate the performance of the proposed 3D recon-
struction from stereo spherical images using three
spherical image datasets; two outdoor datasets, cover-
ing large area: Cathedral and CCSR, and one indoor
dataset with measured ground truth: Studio. The im-
ages were acquired with a SpheroCam-HDR system,
which captures scan lines with turning fisheye lenses,
synthesises them and provides a 50 Mpix latitude-
longitude image. For Cathedral and CCSR dataset,
the camera was placed in three different positions
around the scene and for Studio dataset, four posi-
tions have been used. Each capture was done at two
different heights to produce stereo image pairs.
The Cathedral dataset covers an area of about
2500 m
2
. In order to test how the system per-
forms in the case of large sensor displacements, the
cameras were placed at positions far apart (approx.
18 m in the Cathedral dataset). The CCSR dataset
has shorter sensor displacements, and covers an area
about 250 m
2
. Studio dataset was captured with the
purpose to evaluate the pipeline in a short sensor dis-
placement setting (approx. 1 m). All details about
datasets are included in Table 1.
5.2 Evaluation Modules
Several modules can be distinguished in the stereo im-
FastandAccurateRefinementMethodfor3DReconstructionfromStereoSphericalImages
579
Table 1: Top: Dataset descriptions; Bottom: Time required to process image pairs.
Characteristics Studio Cathedral CCSR
Ground truth Measured GT ICP GT ICP GT
Stereo baseline [m] 0.2 0.6 0.2
Sensor displacement [m] 1.00/2.00/1.00 19.38/17.04 5.81/5.22
Cameras 4 3 3
Matches 754/340/997 546/488 2584/2150
Vertices 1715 681 2832
Edges 3653 1425 6048
Processing
Feat. & desc. extract [s] 8.15 7.02 6.32
Initial estimation [s] 6.99 11.41 25.65
Refinement
ICP [s] 146.057 366.024 995.43
SLAM++[s] 0.120 0.091 0.134
age processing pipeline: depth map calculation, fea-
ture extraction, matching and initial pose and struc-
ture estimation and refinement. The steps are illus-
trated in Figure 1. The stereo spherical image pro-
cessing pipeline and the graph optimisation for pose
and sparse structure refinement were implemented in
C / C++. For the ICP registration a standard im-
plementation provided by the PCL library (Rusu and
Cousins, 2011) was used.
Iterative Closest Point (ICP)
Dense registration using ICP has been successfully
used in the literature for the 3D reconstruction from
spherical images (Kim and Hilton, 2013). There-
fore, ICP is used as a reference in the time and accu-
racy evaluations of the proposed refinement method.
To calculate the initial estimate of the camera poses
and the 3D structure, the proposed image processing
pipeline is used. In the following text, we refer to this
simply as ICP.
Furthermore, we use dense ICP to define a ground
truth for testing the accuracy of our method in the
outdoor datasets where there are no manual measure-
ments available. For that manually matched sparse
features are used to calculate an initial estimate for
the ICP registration, and it will be further refers in the
paper as GT-ICP.
Joint Pose and Structure Refinement
The joint pose and structure refinement is based on
our open-source, nonlinear graph optimisation library,
called SLAM++ (Polok et al., 2013b). This is a very
Table 2: Depth map accuracy results: Differences between
GT and measurements in the depth map.
Sofa 1 Sofa 2 Table Carpet
P1 [cm] 1.8 1.2 0.2 0.3
P2 [cm] - - 0.7 0.8
P3 [cm] - - 7.8 0.1
P4 [cm] 1.7 3.2 1.3 0.3
efficient implementation of nonlinear least squares
solvers, based on fast sparse block matrix manipula-
tion for solving the linearised problems. SLAM++
produces fast, but accurate estimations, which many
times outperform similar state-of-the-art implemen-
tations of graph optimisation systems. This perfor-
mance it is achieved due to the fact that the imple-
mentation exploits the block structure the problems
and offers very fast solutions to manipulate block ma-
trices and perform arithmetic operations. Edges and
vertices are defined according to section 4 and the op-
timisation is performed on the manifold, therefore it
is correctly handling the derivatives of rotations and
translations. There are no simplifications or approxi-
mations involved in the optimisation process.
5.3 Time Evaluation
The disadvantage of applying ICP for image registra-
tion is its processing time. The approach proposed
in this paper offer much faster solutions in this direc-
tion. Table 1, bottom, shows that SLAM++ is, for all
datasets, almost three orders of magnitude faster than
the ICP algorithm. The good time performance stems
from the fact that it optimises for a sparse set of points
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
580
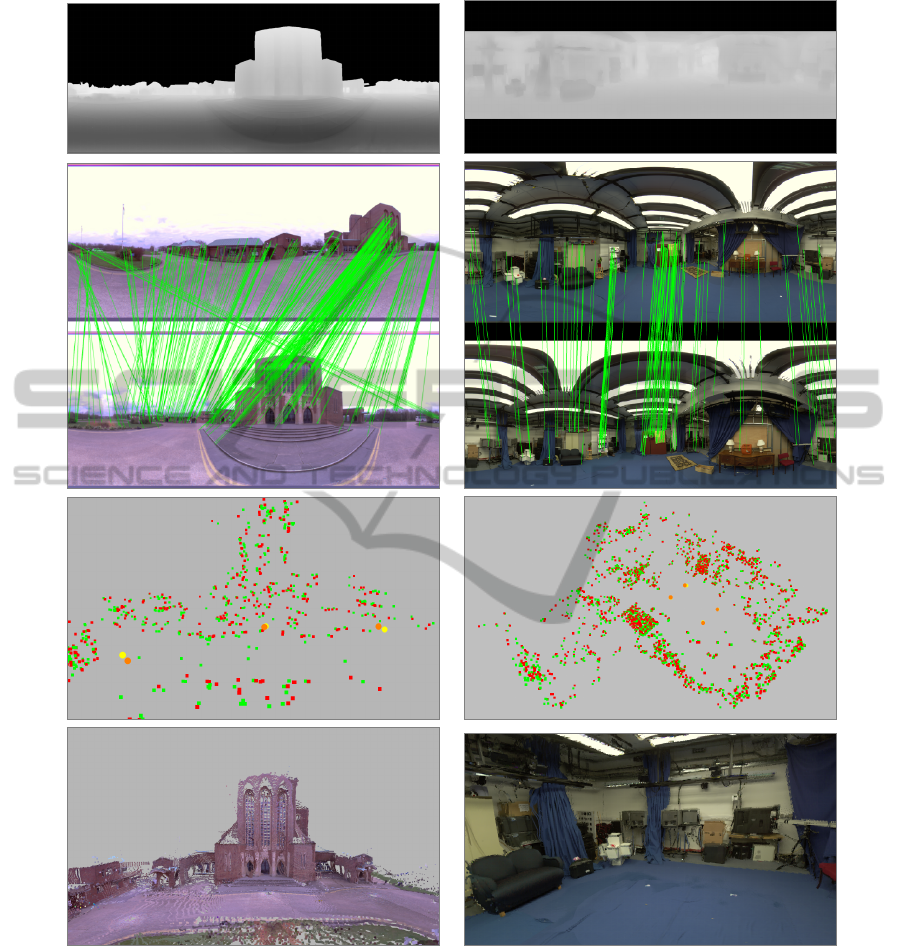
Cathedral Studio
a)
b)
c)
d)
Figure 1: Processing pipeline a) depth map b) inliers after matching with RANSAC algorithm (for better visibility only a
fraction of matches is shown for Studio dataset). Please note that the crossing lines in the left column are not outliers, the
image is spherical so the left part of the image continues on the right. c) initial (in red) vs. optimised (in green) poses and
sparse point cloud d) final dense 3D reconstruction.
and from the actual implementation based on sparse
block solutions to non-linear least squares estimators.
By analysing the processing time of each step of
the pipeline in Table 1, we see that the time of opti-
mising the camera poses is now very small compared
to the other processing times in the pipeline, while
using ICP, the registration time would have been the
predominant time and would have constituted a bot-
tleneck in large applications.
5.4 Accuracy Evaluation
In our pipeline we can identify two sources of er-
rors that can affect the final reconstruction, a) the
FastandAccurateRefinementMethodfor3DReconstructionfromStereoSphericalImages
581

Table 3: Accuracy results: Top: Structure Error. Bottom: Camera pose error evaluated separately for the rotation and
translation.
Criteria Method
Studio Cathedral CCSR
S1-S2 S2-S3 S3-S4 S1-S2 S2-S3 S1-S2 S2-S3
Pose Error
SLAM++ [cm] 0.46 0.79 1.12 70.87 37.14 37.49 11.93
ICP [cm] 1.07 3.61 5.08 67.83 74.05 26.11 14.99
SALM++ [degree] 1.14 0.57 0.89 5.48 3.91 0.81 1.66
ICP [degree] 5.03 0.81 1.38 4.85 4.83 0.52 2.71
Structure Error
SALM++ [cm] 1.61 112.02 48.89
ICP [cm] 3.54 176.56 39.47
error of the depth map and b) the camera pose es-
timation error. To analyse the accuracy of the pro-
posed technique, ground truth data were measured for
all three datasets. Smaller sensor displacement and
flat ground surface of the Studio dataset allowed for
precise positioning of spherical cameras, and manual
measurements of distances from the spherical cam-
era positions to several objects in the scene as well
as distances between camera poses. For the outdoor
datasets, Cathedral and CCSR, the ground truth data
was generated by manually matching sparse features
to create an initialisation for the dense ICP (GT-ICP).
The error of the depth map was evaluated for
the Studio dataset by comparing the calculated depth
from the dense stereo processing with the measured
ground truth. In this dataset, the cameras were placed
in four different position with a know distance in be-
tween, and distance to objects in the scene (two dis-
tances to the sofa, one to the carpet, and one to the
desk) were measured. Table 2 shows the errors in
cm between the manually measured and the estimated
3D positions. The depth map error is, in average, of
1.6 cm for the Studio dataset. We can say that is a
very good depth calculation from stereo spherical im-
ages for indoor scenes, nevertheless, we should ex-
pect larger errors in the outdoor scenes.
In order to evaluate the joint camera and struc-
ture estimation, two types of errors are evaluated, a)
camera pose estimation error and b) structure error.
To compute the pose estimation error, the transfor-
mations between the GT-ICP and the estimated poses
are calculated. The errors in translation and rotation
are reported separately, by computing the norm of the
translation and the angle of rotation, respectively. For
each dataset, pair-wise spherical camera registrations
are evaluated. The structure error is computed in Stu-
dio dataset as average error of distances to known ob-
jects in scene and in the case of Cathedral and CCSR
datasets the structure error is given by the average eu-
clidean distance between two dense point clouds - one
from GT-ICP and second from optimized solution.
Table 3 confirms our expectations that both, ICP
and SLAM++ have similar accuracy, and that larger
errors in pose estimation correlate with errors in struc-
ture estimation. Note that for longer baselines, the
SLAM++ copes better with the errors in the initial es-
timation compared to ICP which requires very good
initialisations. This is due to the fact that unlike
ICP which relies only on matches between consecu-
tive spherical cameras for each registration, SLAM++
also considers matches over multiple spherical im-
ages.
6 CONCLUSIONS AND FUTURE
WORK
The contribution of this paper is the formulation of
the 3D reconstruction from spherical images in terms
of sparse SLAM and based on that, obtaining a much
faster, yet accurate solution than the existing meth-
ods based on dense ICP. The efficiency comes from
both, the algorithm and the highly efficient sparse
block matrix implementation of the nonlinear solver
used in jointly refining the structure and the camera
poses. An initial estimate of the 3D points and the
camera positions is obtained from stereo processing
of pair of spherical images with known baseline and
a robust wide-baseline matching procedure. After the
initialisation, the structure can be refined either via
dense point cloud registration or joint camera pose
and sparse structure optimisation. The later offers a
much faster alternative to ICP while maintaining sim-
ilar accuracy. The speed of the proposed approach
was at least three orders of magnitude faster than ICP
on all the datasets. It also offers a more robust es-
timation capable of exploiting relationships between
multiple spherical images and refines the solution ac-
cording to those constraints, whereas the ICP algo-
rithm works only pair-wise. The same approach can
be also easily applied in reconstruction from RGB-D
cameras where the 2D image features and the corre-
sponding 3D points can be refined similarly to those
from stereo spherical images.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
582

The proposed approach performs the optimisation
on sparse structure and then transforms the dense
point clouds by the calculated camera transforma-
tions. This yields a valid result, however, it may be
possible to obtain a more precise dense point cloud
alignment. Since the relation between the sparse
points and points from the dense point cloud are
known, it is possible to calculate a rigid transfor-
mation that aligns the dense point cloud to the cor-
responding sparse points (e.g. using (Horn, 1987)).
Further work will expand in this direction.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Union, 7
th
Frame-
work Programme grants 316564-IMPART and the
IT4Innovations Centre of Excellence, grant n.
CZ.1.05/1.1.00/02.0070, supported by RDIOP funded
by Structural Funds of the EU and the state budget of
the Czech Republic.
REFERENCES
Agarwal, S., Snavely, N., Simon, I., Seitz, S. M., and
Szeliski, R. (2009). Building rome in a day.
Arun, K., Huang, T., and Blostein, S. (1987). Least square
fitting of two 3-d point sets. IEEE Trans. Pattern Anal-
ysis and Machine Intelligence, 9(5):698–700.
Beall, C., Lawrence, B., Ila, V., and Dellaert, F. (2010). 3D
Reconstruction of Underwater Structures.
Besl, P. and McKay, N. (1992). A method for registration
of 3-D shapes. 14(2).
Chum, O. and Matas, J. (2005). Matching with PROSAC -
Progressive Sample Consensus. In Proc. CVPR, pages
220–226.
Chum, O. and Matas, J. (2008). Optimal Randomized
RANSAC. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 30(8):1472–1482.
Chum, O., Matas, J., and Kittler, J. (2003). Locally Opti-
mized RANSAC. In Lecture Notes in Computer Sci-
ence, volume 2781, pages 236–243. Springer.
Dellaert, F. and Kaess, M. (2006). Square Root SAM: Si-
multaneous localization and mapping via square root
information smoothing. 25(12):1181–1203.
Feldman, D. and Weinshall, D. (2005). Realtime ibr with
omnidirectional crossed-slits projection. In Proc.
ICCV, pages 839–845.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A Paradigm for Model Fitting with Appli-
cations to Image Analysis and Automated Cartogra-
phy. Communications of the ACM, 24(6):381–395.
Hartley, R. and Zisserman, A. (2003). Multiple View Geom-
etry in Computer Vision. 2nd edition.
Hong, J., Tan, X., Pinette, B., Weiss, R., and E.M., R.
(1991). Image-based homing. In Proc. ICRA, pages
620–625.
Horn, B. K. P. (1987). Closed-form Solution of Absolute
Orientation Using Unit Quaternions. Journal of the
Optical Society of America A, 4(4):629–642.
˙
Imre, E., Guillemaut, J.-Y., and Hilton, A. (2010). Moving
Camera Registration for Multiple Camera Setups in
Dynamic Scenes. In Proc. BMVC, pages 1–12.
Jeong, Y., Nister, D., Steedly, D., Szeliski, R., and
Kweon, I.-S. (2012). Pushing the envelope of mod-
ern methods for bundle adjustment. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
34(8):1605–1617.
Kaess, M., Ranganathan, A., and Dellaert, F. (2008). iSAM:
Incremental smoothing and mapping. 24(6):1365–
1378.
Kim, H. and Hilton, A. (2013). 3d scene reconstruction
from multiple spherical stereo pairs. International
Journal of Computer Vision, 104(1):94–116.
K
¨
ummerle, R., Grisetti, G., Strasdat, H., Konolige, K., and
Burgard, W. (2011). g2o: A general framework for
graph optimization. In Proc. of the IEEE Int. Conf. on
Robotics and Automation (ICRA), Shanghai, China.
Lhuillier, M. (2008). Automatic scene structure and camera
motion using a catadioptric system. Computer Vision
and Image Understanding, 109(2):186–203.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. 60(2):91–110.
Nayar, S. (1997). Catadioptric omnidirectional camera. In
Proc. CVPR, pages 482–488.
Polok, L., Ila, V., Solony, M., Smrz, P., and Zemcik, P.
(2013a). Incremental block cholesky factorization for
nonlinear least squares in robotics. In Proceedings of
the Robotics: Science and Systems 2013.
Polok, L., Solony, M., Ila, V., Zemcik, P., and Smrz, P.
(2013b). Efficient implementation for block matrix
operations for nonlinear least squares problems in
robotic applications. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation.
IEEE.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the icp algorithm.
Rusu, R. B. and Cousins, S. (2011). 3D is here: Point Cloud
Library (PCL). In Proc. ICRA.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International Journal of Computer Vision,
47(1):7–42.
Snavely, N., Seitz, S. M., and Szeliski, R. (2006). Photo
tourism: exploring photo collections in 3d. ACM
transactions on graphics (TOG), 25(3):835–846.
Torr, P. H. S. and Zisserman, A. (2000). MLESAC: A New
Robust Estimator with Application to Estimating Im-
age Geometry. Computer Vision and Image Under-
standing, 78(1):138–156.
V.Fragoso and Turk, M. (2013). SWIGS: A Swift Guided
Sampling Method. In Proc. of IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR), pages
2770–2777, Portland, Oregon.
Zhang, F. (2005). The Schur complement and its applica-
tions, volume 4. Springer.
FastandAccurateRefinementMethodfor3DReconstructionfromStereoSphericalImages
583
