
Coherent Selection of Independent Trackers for Real-time Object
Tracking
Salma Moujtahid, Stefan Duffner and Atilla Baskurt
Universit´e de Lyon, CNRS, INSA-Lyon, LIRIS, UMR5205, F-69621, Villeurbanne, France
Keywords:
Visual Object Tracking, Classifier Fusion, Tracker Selection, Online Update.
Abstract:
This paper presents a new method for combining several independent and heterogeneous tracking algorithms
for the task of online single-object tracking. The proposed algorithm runs several trackers in parallel, where
each of them relies on a different set of complementary low-level features. Only one tracker is selected at
a given frame, and the choice is based on a spatio-temporal coherence criterion and normalised confidence
estimates. The key idea is that the individual trackers are kept completely independent, which reduces the
risk of drift in situations where for example a tracker with an inaccurate or inappropriate appearance model
negatively impacts the performance of the others. Moreover, the proposed approach is able to switch between
different tracking methods when the scene conditions or the object appearance rapidly change. We experimen-
tally show with a set of Online Adaboost-based trackers that this formulation of multiple trackers improves the
tracking results in comparison to more classical combinations of trackers. And we further improve the overall
performance and computational efficiency by introducing a selective update step in the tracking framework.
1 INTRODUCTION
Visual tracking of arbitrary objects in complex scenes
is a challenging task that has gained increasing inter-
est in computer vision research during the past years.
We consider here the problem of online tracking of a
single object in a video stream, i.e. the object’s posi-
tion at a given time is only estimated from its previous
position(s) and previous and current video frames but
not from future observations. Also, the camera is not
required to be fixed and no prior information about
background nor the object’s appearance or motion is
used. In this setting, the object’s shape and appear-
ance and the backgroundcan change considerably due
to different lighting conditions, viewing angles, defor-
mations, and partial occlusions. To successfully track
an object, the algorithm needs to dynamically adapt to
the visual changes of the object’s appearance as well
as its environment. This adaptation however bears
the risk of gradually including background informa-
tion into the object model, which leads the tracker to
drift and eventually lose the object.
1.1 Related Work
One way of increasing the robustness to changing ap-
pearance and external conditions is by using several
different appearance (or motion) models which are
(dynamically) selected or merged in a way that makes
the tracker less sensitive to these changes at a given
time. Some existing methods (Yilmaz et al., 2004;
Hua et al., 2006; Stalder et al., 2009) follow this ap-
proach by (online) training a foreground/background-
classifier based on several visual features character-
ising different visual aspects like colour, texture or
shape, e.g. Histogram of Oriented Gradients (HOG),
colour histograms, filter responses, or local descrip-
tors like SIFT, etc. However, this low-level fusion
of features leads to problems, when some of the vi-
sual attributes are suddenly altered or hidden due to
changes in lighting, the object’s view point, deforma-
tions or partial occlusions, for example. Other meth-
ods fuse different modalities in a more explicit way
and at a higher level. For example, Collins et al.
(Collins and Liu, 2005) compute likelihood (or con-
fidence) maps with different linear combinations of
RGB channels for each video frame. Then they per-
form mean shift to track a given object in each likeli-
hood map and fuse the result of each “tracker” using
the median. Yin et al. (Yin et al., 2008) extend this
approach with different features (e.g. HOG, saliency)
and using adaptive weights depending on the fore-
ground/background separability of each feature. Tri-
esch (Triesch and v. d. Malsburg, 2001) also used dif-
584
Moujtahid S., Duffner S. and Baskurt A..
Coherent Selection of Independent Trackers for Real-time Object Tracking.
DOI: 10.5220/0005311305840592
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 584-592
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

ferent visual cues to produce saliency maps and their
reliabilities to integrate them into a tracking result.
Some tracking methods relying on Particle Fil-
ters (Perez et al., 2004; Maggio et al., 2007; Badri-
narayanan et al., 2007; Moreno-Noguer et al., 2008;
Nickel and Stiefelhagen, 2008; Duffner et al., 2009)
combine the modalities by using different observation
likelihood functions or different state spaces and then
integrate these multiple cues in a probabilistic way.
Leichter et al. (Leichter et al., 2006) proposed a more
general probabilistic framework to fuse the output of
different independent trackers. More recently, Kwon
et al. (Kwon and Lee, 2010) proposed in their VTD
method to combine different motion and appearance
models using Interactive MCMC, and in VTS (Kwon
and Lee, 2011) to sample from a space of trackers
with different properties in order to increase the over-
all tracking robustness. However, the interaction be-
tween trackers can become relatively complex and
difficult to control. Also, many appearance models
may need to be evaluated for each video frame, which
makes these approaches computationally expensive.
When treating visual tracking as a detection or
classification problem, one can make use of so-called
ensemble classifiers for combining several classifiers
to increase the discriminative power (Kittler et al.,
1998). Avidan et al. (Avidan, 2007), for example,
proposed to use Adaboost where several “weak” clas-
sifiers are combined into a “strong” one and updated
dynamically in order to classify each pixel as back-
ground or object. Similarly, Grabner et al. (Grabner
and Bischof, 2006) use a large dynamic pool of weak
classifiers operating on the whole object image patch
or parts of it, and only a small part of them is selected
at each frame to form the final classifier.
Recently, Bailer et al. (Bailer et al., 2014) pro-
posed a method to fuse trackers only by considering
their estimated bounding boxes of the object, using
a specific energy minimisation framework that takes
into account the global performance of each tracker
as well as trajectories over time. They show that by
combining many existing recent tracking algorithms,
the state-of-the-art can be improved.
Finally, the most similar work to ours is the one
from Stenger et al. (Stenger et al., 2009), where sev-
eral different tracking methods working with different
visual features are combined in a parallel or sequen-
tial way based on their normalised confidence values.
They test their approach on a set of trackers and all
possible pairs and triplets of them. However, the eval-
uation is performed only on a small set of videos for
the tasks of hand and face tracking, and they use an
additional hand/face detector, trained off-line. More-
over, in our work, by using the same architecture (On-
line Adaboost) for the individual trackers as well as
for the baseline methods allows for a more rigorous
evaluation of the contribution of individual trackers
and the proposed scheme for combining them.
1.2 Motivation
The problem with approaches that use likeli-
hood/confidence maps and also methods based on
tracker sampling (e.g. VTS) is that the likelihood
needs to be computed on many image positions (or
at least a search window) and possibly at different
scales, which is computationally expensive. Further-
more, existing ensemble classifiers (e.g. using Ad-
aboost) often use highly correlated weak classifiers
or features, and can only gradually adapt to changes
in object appearance or scene variations or otherwise
suffer from drift. This motivates our choice of comb-
ing several independent trackers at a higher level,
each of them using features based on different visual
aspects like colour, texture and shape. By recurrently
selecting the most suitable tracker, the overall sys-
tem can switch rapidly between appearance models
depending on the changes of the scene and the object.
The remainder of this paper is organised as fol-
lows. In Section 2, we outline the proposed approach.
In Section 3, we briefly explain the individual track-
ers used in our approach, and in Section 4, the pro-
posed algorithm for tracker selection and update is
presented. Experimental results illustrating the supe-
riority of the proposed method compared to standard
fusion methods are shown in Section 5.
2 PRINCIPLE APPROACH
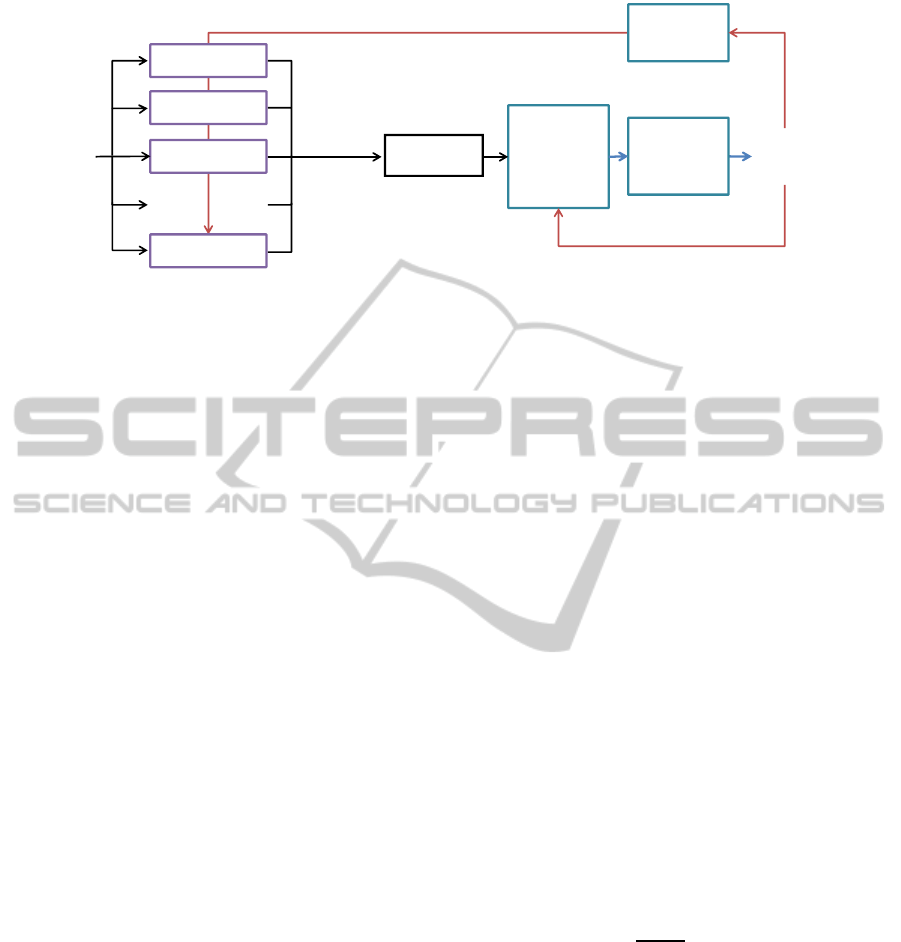
The framework of the approach is demonstrated in
Fig. 1. The different competing trackers work in par-
allel, each of them estimating the object’s state, i.e.
a bounding box, and the confidence in this result. In
principle, any kind of trackers can be used as long as it
provides a confidence measure, score, or probability.
Here, we choose trackers relying on the Online Ad-
aboost (OAB) algorithm (Grabner and Bischof, 2006)
enhanced with different types of features. We will
briefly describe this method and the visual features in
the following section. The confidence value is nor-
malised based on parameters that have been trained
before on a separate training data set. This normal-
isation is an important step as the different trackers
can be heterogeneous and their confidence values may
have different dynamics.
Then, in a given frame, a process of tracker elim-
ination is applied based on the overall temporal and
CoherentSelectionofIndependentTrackersforReal-timeObjectTracking
585
!"#$%!&'
()*+,
-./%0
!"#$%!&1
!"#$%!&2
%3*0!"4&")/&
5*",."4&
#06%!%)#%&
%)70!#%3%),&
5%4%#,%/&
8%9,
,!"#$%!
!
!"#$%!&:
80+)/.);&80<
#0)7./%)#%9&
=&80+)/.);&
80<%9
>0)7./%)#%?
8"9%/
9%4%#,.0)&
>0)7./%)#%
)0!3"4.9",.0)
5%4%#,.-%&
+*/",%
Figure 1: Procedure of the competing tracker approach. One out of L trackers is selected based on their confidence and the
spatio-temporal coherence of the solution.
spatial coherence of the result. This filters out the
trackers outside a given limit resulting in a smoother
and spatially more coherent tracking result. In the fi-
nal step, the best tracker for the current frame is se-
lected from the remaining individual trackers based
on their normalised confidence values. All the track-
ers keep their individual states (i.e. bounding boxes)
and are re-considered for selection at each point in
time. The advantage of our tracker selection ap-
proach is that it avoids unnatural jumps of the result-
ing bounding boxes while still being able to quickly
change from a less confident tracker to more confi-
dent one, for example when the object’s appearance
rapidly changes.
We remind that we do not perform any fusion of
the individual tracking results which combines the
output of all trackers or a subset of them. Also there
is no direct interaction between the different track-
ers. Each tracker remains independent, and only one
tracker is selected based on the individual confidence
values and the global spatio-temporal coherence.
3 INDIVIDUAL TRACKERS
The concept for this paper is to use relatively simple
and fast trackers, that are based on low-level indepen-
dent and complementary features. Here, we propose
to use different OAB trackers, each of them using
a different type of visual feature which will be de-
scribed in Section 3.2. The choice of using Adaboost-
based trackers is motivated by their computational ef-
ficiency and the simplicity of using different indepen-
dent features with the same architecture. Of course,
a different tracking method (e.g. structured output
SVMs) can be used as well.
3.1 Online Adaboost
Online Adaboost (OAB) (Grabner and Bischof, 2006)
is an extension of the well-known Adaboost algo-
rithm (Freund and Schapire, 1997) for on-line learn-
ing that has been effectively applied to the on-line
tracking problem (Grabner et al., 2006) by training
a binary classifier with foreground and background
image patches. In this approach, a “strong” clas-
sifier H uses a set of “selectors” h
sel
n
, (n ∈ 1..N),
each of them iteratively choosing the most discrim-
inative features from a global pool of “weak” clas-
sifiers h
m
, (m ∈ 1..M). Each h
m
(x) ∈ {−1, +1} per-
forms a simple binary classification using a single
low-level feature extracted from a candidate image re-
gion (explained in the following section). Then, the
final strong classifier output for a given example im-
age patch x is:
H(x) = Φ
N
∑
n=1
α
n
h
sel
n
(x)
!
, (1)
where the α
n
∈ (0, 1) are the weak classifier weights:
α
n
=
0 if e
n
< 0.5
log
1− e
n
e
n
otherwise,
(2)
with e
n
being the classification error of h
sel
n
. The func-
tion Φ(·) is a decision function (e.g. the Heavyside
step function), which is of minor importance in our
approach as we only use the confidence value (see
Section 4.1). At each frame, the object is tracked by
applying the classifier several times on image patches
in a region around the last tracking position (the
search window) and choosing the patch x
∗
with the
highest confidence (see Section 4.1). Then the fea-
ture distributions in the weak classifiers correspond-
ing to object and background as well as the classi-
fiers’ weights α
n
are incrementally updated based on
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
586

the new image information and the respective classi-
fication errors. For more details we refer to (Grabner
et al., 2006).
3.2 Low Level Features
As mentioned before, each individual tracker relies
on different types of features. In this paper, we pro-
pose to use three types of complementary features
(and three individual trackers) explained in the fol-
lowing. Clearly, the proposed method is not limited
to these three, and more trackers and/or other feature
types can be added. A feature is computed on a sub-
region of the image patch that corresponds to the ob-
ject’s bounding box.
• Haar-like Features: as originally proposed in
(Grabner et al., 2006; Viola and Jones, 2001).
They correspond to differences of the mean pixel
intensities of adjacent rectangular regions.
• Histogram of Oriented Gradient (HOG) Fea-
tures: a simplification of the original HOG (Dalal
and Triggs, 2005) where the gradients computed
on a region are quantised into a set of 8 orienta-
tions and 3 magnitudes, and the value of a single
bin is used as a feature.
• Histogram Of Colour (HOC) Features: HSV
histograms of a region are computed with a 2 ×
3×8 quantisation on the Hue and Saturation chan-
nels. As for the HOG features, the value of a sin-
gle bin is used as a feature.
The feature selection (sub-regions, bins) is performed
by the standard Adaboost algorithm on a subset of
random samples.
4 TRACKER COMBINATION
Each of the individual trackers alone does not per-
form very well on average, measured on a challeng-
ing tracking benchmark data set. However, as we
will show experimentally, our proposed combination
scheme of multiple trackers using different types of
features outperforms each of these individual trackers
as well as a single tracker that combines all types of
features in the classical way.
4.1 Confidence Measure and
Normalisation
A variety of confidence measures exist depending on
the tracking or classification algorithm. Here, we use
the one originally proposed for OAB. Given a set of
trackers T
k
, (k ∈ 1..L), the confidence c
k
for T
k
is ob-
tained by weighting the results of each one of its se-
lectors h
sel
n
. For an example x, we have:
c
k
(x) =
N
∑
n=1
α
n
h
sel
n
(x). (3)
This confidence measure expresses, in a way, the pro-
portion of selectors h
sel
n
having correctly classified ex-
ample x. Note that it is directly related to the output
of the strong classifier (Eq. 1).
Having different trackers, the confidence values
for each one will have different dynamics. In order
to be able to compare the confidence values, we nor-
malise them for each tracker T
k
using the mean µ
k
and
standard deviation σ
k
computed on a separate data
set: ALOV300++ (Smeulder et al., 2014), similar to
(Stenger et al., 2009): c
′
k
=
c
k
−µ
k
σ
k
. These videos cover
various changes in illuminations, transparency, clut-
ter, occlusion, zoom, appearance, motion patterns and
contrast, which makes them suitable for estimating µ
k
and σ
k
in typical real-world scenarios.
4.2 Spatial and Temporal Coherence
Using the normalised confidence to choose the best
tracker at a given frame t is not sufficient, as we will
see in the experiments section. When the bound-
ing boxes of the individual trackers are further apart
(because one or several of them have drifted away),
jumps can occur in the overall tracking process since
no continuity is present in the choice of best confi-
dence. In order to avoid these jumps and to make the
output smoother, a spatial and temporal coherence cri-
terion is introduced, which ignores the result of those
trackers that are too far away from the previous ob-
ject’s position.
At each frame t, we have a set of trackers
T
k
, (k ∈ 1..L), that given an example, return a con-
fidence c
k
and a bounding box B
k
t
surrounding the
object in the image. This bounding box is defined
by the position of its centre (x
k
t
, y
k
t
) and its dimen-
sions (w
k
t
, h
k
t
). The bounding box B
t−1
of the previous
frame t − 1 coming from the selected tracker is saved
and used to compute its distance to each of the current
tracker’s bounding boxes B
k
t
. Then, at frame t, tracker
T
k
is (temporarily) eliminated if:
max
x
k
t
− x
t−1
− Θ
x
,
y
k
t
− y
t−1
− Θ
y
> 0. (4)
Θ = (Θ
x
, Θ
y
) is a two-dimensional distance threshold
proportional to the size of B
t−1
, that is Θ
x
= β
w
t−1
2
,
and Θ
y
= β
h
t−1
2
. The optimal coefficient β is com-
puted empirically by running the algorithm on the
ALOV300++ data set and left constant for all of our
experiments.
CoherentSelectionofIndependentTrackersforReal-timeObjectTracking
587

After this step, only a subset of trackers
T
i
, (i ∈ 1..L
′
), with L
′
≤ L is left. The final decision on
the best tracker T
s
with bounding box B
t
is given by
selecting the tracker with maximal normalised confi-
dence c
′
s
:
s = argmax
i∈1..L
′
c
′
i
(5)
In the case where T
i
, (i ∈ 1..L
′
) is empty, then only the
maximal confidence criterion is applied.
4.3 Selective Update
In the original OAB architecture, the trackers are
completely independent in the sense that each tracker
T
k
, (k ∈ 1..L), updates its discriminative model using
its resulting bounding boxes B
k
t
at frame t.
One update scheme would be to use the selected
tracker’s bounding box to update the remaining track-
ers. This idea proved to be ineffective due to the rapid
drift of the now co-dependent trackers. In fact, the
trackers start drifting when the background informa-
tion is falsely included into the foreground model.
Instead we introduce a selective update strategy
with a slower update rate (and still independent track-
ers) giving us a slower learning rate of the models and
reduced computational time, which will help prevent
this drifting phenomenon. To this end, we choose to
only update the previously selected tracker with its re-
sulting bounding box, since we consider that the non-
selected trackers may have eventually drifted. Thus
we do L− 1 less updates than in the original learning
architecture.
5 EXPERIMENTS
The experiments for the proposed approach are con-
ducted on the VOT2013 data set (Kristan et al., 2013).
VOT2013 is a visual object tracking challenge held
in 2013 in order to benchmark on-line tracking al-
gorithms. The data set contains 23 videos and 8416
frames. We did not use the provided VOT2013 eval-
uation framework because the capability of our pro-
posed fusion method to return to the object after los-
ing it is not taken into account in the VOT2013 frame-
work but on contrary is penalised as the trackers are
stopped and reinitialised from the point of loss. Fur-
ther, the aim here is not necessarily to show that the
proposed method outperforms existing state-of-the-
art tracking algorithms. We rather want to evaluate
and show the benefit of our tracker selection approach
compared to classical tracker fusion methods.
5.1 Compared Methods
To be able to correctly evaluate the performance of
the proposed approach and to comprehend the impact
of the different components, we compared it to a cer-
tain number of baseline methods. In the following, we
describe the different methods that have been tested.
• Proposed Method (PM): As described above,
the proposed approach uses L = 3 trackers de-
noted HAAR, HOG and HOC with 50 selectors
each. The spatio-temporal coherence and nor-
malised confidence is used for tracker selection.
All the trackers are updated every frame.
• Proposed Method with Selective Update
(PM+). This method is the same as PM, but
with the selective update strategy described in
Section 4.3.
• Best Confidence (BC). Using the same L = 3
trackers as the proposed method, the selection of
the best tracker is only based on the normalised
confidence values.
• Fusion of Features (FoF). The OAB method al-
lows different sets of low-level features to be used
together in the global pool of weak classifiers.
In the FoF baseline, one strong classifier is con-
structed based on all the different feature types.
This type of feature fusion is a classical way of
combining different types of low-level observa-
tions. In order to provide for a fair comparison,
we used the same number of features as in the pro-
posed approach, i.e. 3× 50 selectors.
• Fusion of Features with Minimal Update
(FoF+). To be able to correctly compare to the
proposed method with selective update, we de-
creased the number of updates of FoF by L − 1.
To this end, the tracker is only updated one frame
out of L.
• Centroid of Trackers (CoT). This is a high-level
fusion approach, where the resulting bounding
box is computed from the mean of the bounding
boxes of the individual trackers weighted by their
respective confidence values.
5.2 Evaluation Measures
To evaluate the methods mentioned above, we used
the common F-score which combines the measures of
precision and recall. Based on the areas of the result-
ing bounding box B
t
, the ground-truth box B
gr
t
and
their intersection, the F-score f
t
at frame t is defined
as:
f
t
= 2×
precision
t
× recall
t
precision
t
+ recall
t
= 2×
T
(B
t
, B
gr
t
)
B
t
+ B
gr
t
(6)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
588
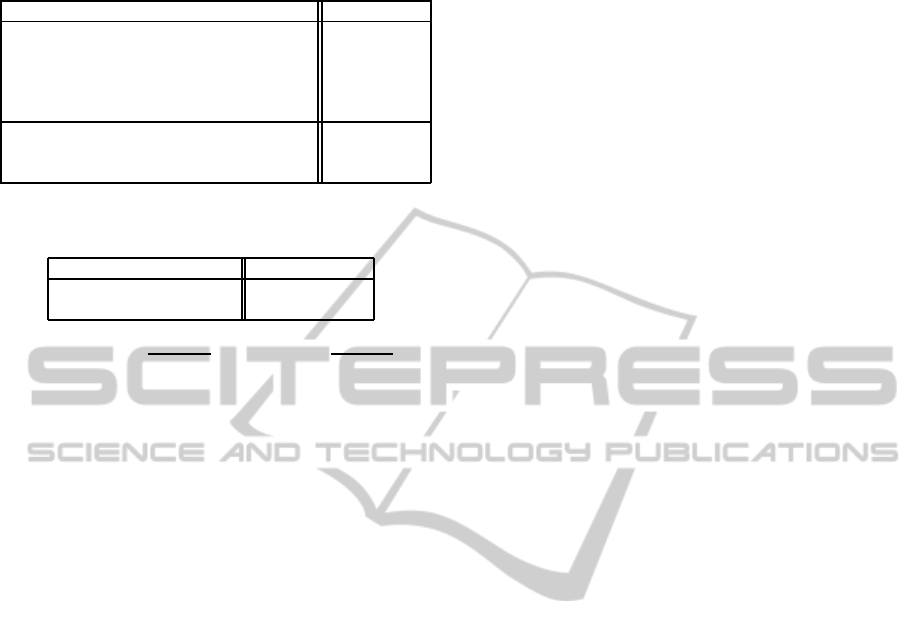
Table 1: Success rates for the different methods on the
VOT2013 data set.
method success rate
Best theoretical selection (93.43%)
Best Confidence (BC) 78.32%
Fusion of Features (FoF) 80.13%
Centroid of Trackers (CoT) 61.21%
Proposed Method (PM) 81.10%
Best theor. sel. + selective update (93.86%)
Fusion of Features + min. update (FoF+) 77.45%
Proposed Method + selec. update (PM+) 83.93%
Table 2: Prediction rates for Best Confidence and the pro-
posed method on the VOT2013 data set.
method prediction rate
Best Confidence (BC) 76.22%
Proposed Method (PM) 77.99%
with precision
t
=
T
(B
t
,B
gr
t
)
B
t
and recall
t
=
T
(B
t
,B
gr
t
)
B
gr
t
.
For each video, the trackers are initialised with the
ground truth in the first frame and run until the end of
the video. At each frame, the different methods return
the F-score associated with their result. The tracking
method is considered lost when f
t
= 0.
Using the F-score, two performance measures are
introduced: success rate and prediction rate. The
success rate represents the number of frames hav-
ing f
t
> 0.1. The relatively low threshold captures
the overall tracking robustness of the method, not so
much its bounding box accuracy. The prediction rate
on the other hand represents the proportion of frames
where the method correctly predicted the best tracker.
In fact, knowing the ground truth position of the ob-
ject, the F-score of each individual tracker is com-
puted, then the best theoretical tracker (and F-score)
at each frame in known. Based on this, we can com-
pute the number of frames where a selection method
has correctly predicted the best individual tracker. We
allow for a 20% margin on the best F-score, i.e. the
two best trackers are considered equivalent if the dif-
ference of their F-score is lower than 20%.
To provide an upper bound, we also computed the
success rate of a best theoretical selection, i.e. the suc-
cess rate of a method that always predicts the tracker
with the highest F-score. This measure is important
as it expresses the general performance of the indi-
vidual trackers. All presented numbers are averaged
measures over 10 tracker runs.
5.3 Results
As shown in Table 1 and Table 2, the success and
prediction rate of our proposed method (PM) outper-
forms Best Confidence (BC). In Fig. 2 and Fig. 3, we
also introduce some results from the video ’bolt’. It is
a particularly challenging sequence due to the number
of similar objects and colours, complex background,
and change in appearance. We can see in Fig. 3 (1)
that the use of our spatio-temporal coherence criterion
eliminates the jumps that are introduced when only
using the normalised confidence BC. Although sur-
passing BC, PM cannot avoid all the jumps. However,
thanks to the simultaneous use of the spatio-temporal
coherence and the confidence, the proposed method
has the ability to relock on the object without any re-
initialisation of the trackers. This can be illustrated in
Fig. 2 (a), where we can observe that the tracker HOC
(green) is the only one able to correctly track the ob-
ject. BC (b) has a very discontinuous tracking while
PM (d) succeeded to lock on the HOC tracker.
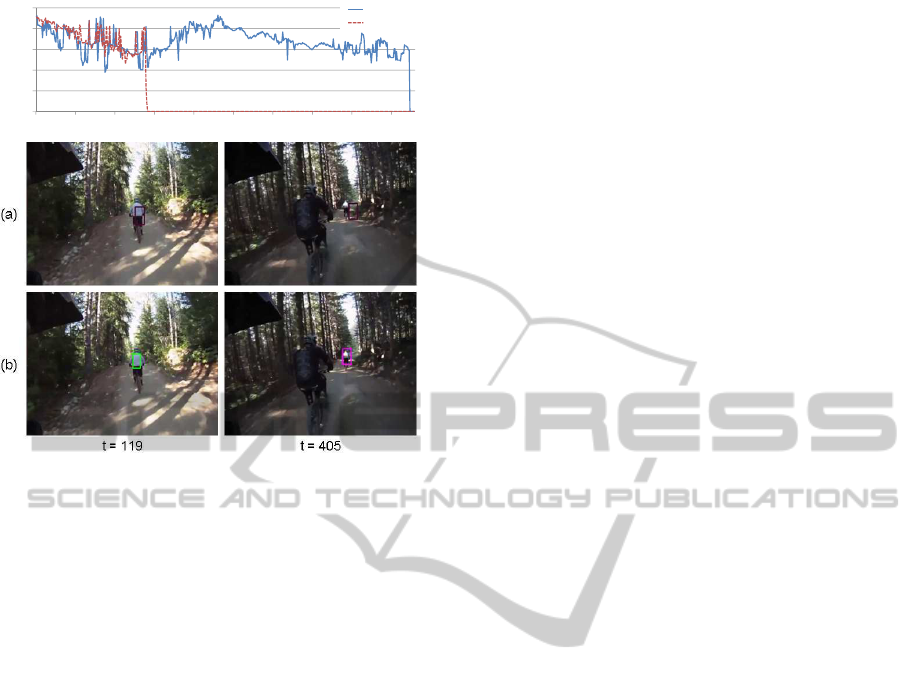
The proposed method also outperforms the Fusion
of Features (FoF) approach. In this approach, the fea-
tures are not independent, since they are all updated
with the same data. As a consequence, as soon as
a tracker begins to drift, wrong data or noise is in-
troduced, and it is impossible for the trackers to re-
cover as illustrated in Fig. 4 and Fig. 2 (c) : The FoF
method started drifting in frame 5, and completely
loses the object afterwards. Unlike this approach,
PM (d) uses independent trackers. Thus, the selection
scheme makes it possible to switch from one tracker
to another if it is lost. PM succeeds in tracking the ob-
ject at almost the performance of the best theoretical
results (Fig. 3).
As for the Centroid of Trackers, the low success
rate (Table 1) shows that it is not a valuable method
as the individual trackers do not always perform well
simultaneously, and a lost tracker may considerably
disturb the overall result.
Finally, the bottom of Table 1 shows the success
rates for the proposed method with selective update
(PM+) and the corresponding baseline FoF+. The se-
lective update slightly increases the performance and
produces the best results among the compared meth-
ods. In Fig. 3 (2), we can see that PM+ successfully
tracks the object whereas the FoF+ only tracks cor-
rectly for a certain time and then starts drifting and
loses the object. The selective update also improves
the speed by around 50%. The proposed method runs
at around 6 fps (with non-optimised and single-core
C++ code), where the majority of computation time
is spent on feature computation and update of the
Adaboost trackers. The combination method using
temporal and spatial coherence with confidence (PM)
adds very little computational overhead.
CoherentSelectionofIndependentTrackersforReal-timeObjectTracking
589
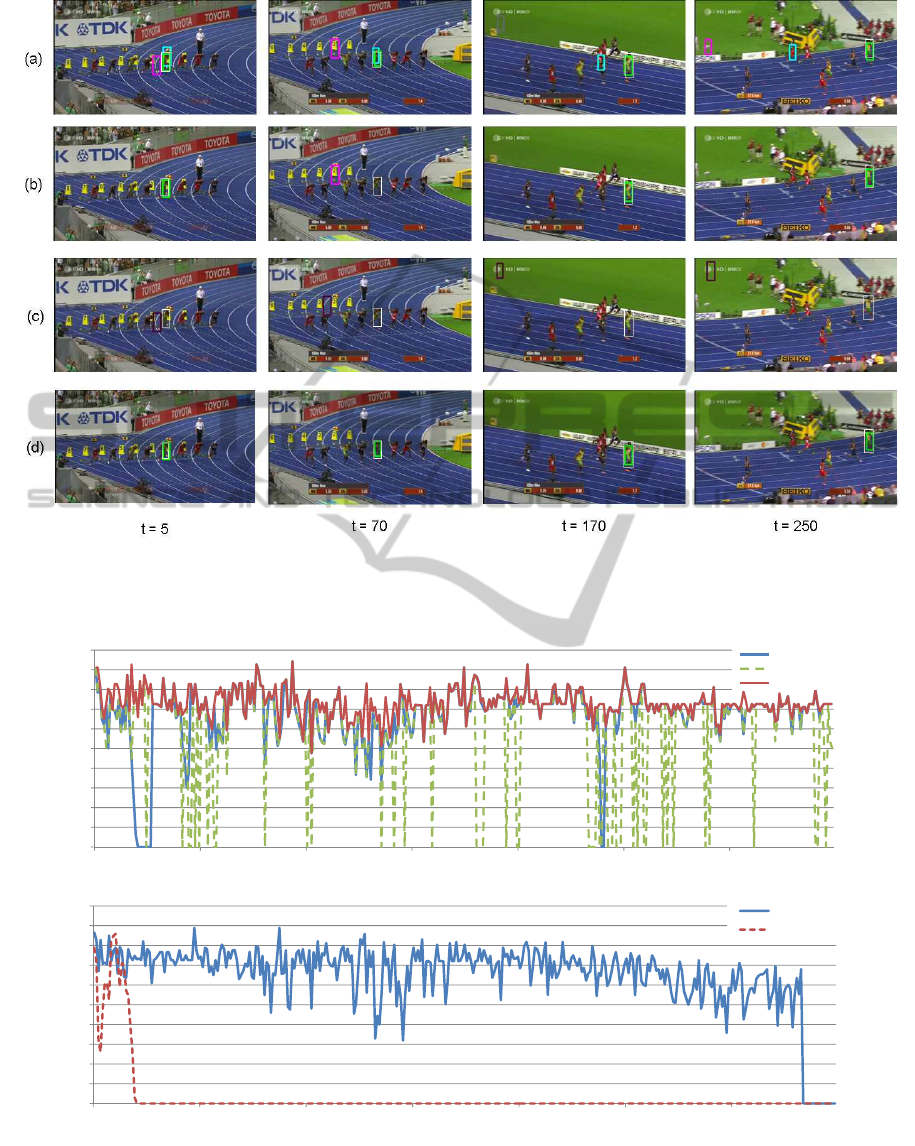
Figure 2: Comparison of tracking results on the “bolt” video for (a) the individual trackers (white: ground-truth, pink: Haar
tracker, blue: HOG tracker, green: HOC Tracker), (b) Best Confidence (BC), (c) Fusion of Features (FoF), and (d) the
proposed method (PM).
!"
!#
!$
!%
!&
!'
!(
!)
!*
"
" &" " " "&" # " #&" $ "
!"#$%&
%'(&
+,-./0123
45
46.7/7869-:.6;:
!"
!#
!$
!%
!&
!'
!(
!)
!*
"
" &" " " "&" # " #&" $ "
!"#$%&
%'(&
+,-./01234
5653
Figure 3: F-score measures of the “bolt” video, (1) proposed method (PM), Best confidence (BC), best theoretical results and
(2) proposed method with selective update (PM+), Fusion of Features with minimal update (FoF+).
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
590
!"
!#
!$
!%
&
& '& & & &'& " & "'& ( & ('& # & #'&
!"#$%&
%'(&
)*+,-./01
232
Figure 4: Comparison of results on the “dh” video for (a)
Fusion of Features (FoF), (b) the proposed method (PM)
where (pink: Haar, blue: HOG, green: HOC Tracker).
6 CONCLUSION
In this paper, we presented a simple method to select
from a pool of trackers the most suitable one. It in-
tegrates a spatial and temporal coherence criterion, a
consistent confidence evaluation for tracker selection
and a selective update strategy. We used OAB-based
trackers with simple low-level features. Experimen-
tal results demonstrate that, even in very challenging
sequences, the proposed method improves the overall
robustness and outperforms classical tracker combi-
nation strategies.
Future work will concentrate on introducing new
and better performing trackers also introducing more
low-level features (e.g. motion) to complete the set of
trackers and achieve a best theoretical selection rate
of 100% (c.f. Table 1).
REFERENCES
Avidan, S. (2007). Ensemble tracking. IEEE Trans. on
PAMI, 29(2):261–271.
Badrinarayanan, V., Perez, P., Le Clerc, F., and Oisel, L.
(2007). Probabilistic color and adaptive multi-feature
tracking with dynamically switched priority between
cues. In Proc. of ICCV.
Bailer, C., Pagani, A., and Stricker, D. (2014). A superior
tracking approach: Building a strong tracker through
fusion. In Proc. of ECCV, pages 170–185.
Collins, R. T. and Liu, Y. (2005). On-line selection of dis-
criminative tracking features. IEEE Trans. on PAMI,
27(10):1631–1643.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proc. of CVPR.
Duffner, S., Odobez, J.-M., and Ricci, E. (2009). Dynamic
partitioned sampling for tracking with discriminative
features. In Proc. of BMVC, London, UK.
Freund, Y. and Schapire, R. (1997). A decision-theoretic
generalization of on-line learning and an application
to boosting. Journal of Computer and System Sci-
ences, 55(1):119–139.
Grabner, H. and Bischof, H. (2006). On-line boosting and
vision. In Proc. of CVPR, pages 260–267.
Grabner, H., Grabner, M., and Bischof, H. (2006). Real-
time tracking via on-line boosting. In Proc. of BMVC,
pages 47–56.
Hua, C., Wu, H., Chen, Q., Wada, T., and City, W. (2006).
A pixel-wise object tracking algorithm with target and
background sample. In Proc. of ICPR.
Kittler, J., Hatef, M., Duin, R. P. W., and Matas, J. (1998).
On combining classifiers. IEEE Trans. on PAMI,
20(3):226–239.
Kristan, M., Cehovin, L., Pflugfelder, R., Nebehay, G., Fer-
nandez, G., Matas, J., and et al. (2013). The Visual
Object Tracking VOT2013 challenge results. In Proc.
of ICCV (Workshops).
Kwon, J. and Lee, K. (2010). Visual tracking decomposi-
tion. In Proc. of CVPR, pages 1269–1276.
Kwon, J. and Lee, K. (2011). Tracking by sampling track-
ers. In Proc. of ICCV.
Leichter, I., Lindenbaum, M., and Rivlin, E. (2006). A gen-
eral framework for combining visual trackers – “black
boxes” approach. IJCV, 67(3):343–363.
Maggio, E., Smeraldi, F., and Cavallaro, A. (2007). Adap-
tive multifeature tracking in a particle filtering frame-
work. IEEE on Circuits and Systems for Video Tech-
nology, 17(10):1348–1359.
Moreno-Noguer, F., Sanfeliu, A., and Dimitris, S. (2008).
Dependent multiple cue integration for robust track-
ing. IEEE Trans. on PAMI, 30(4):670–685.
Nickel, K. and Stiefelhagen, R. (2008). Dynamic integra-
tion of generalized cues for person tracking. In Proc.
of ECCV, pages 514–526.
Perez, P., Vermaak, J., and Blake, A. (2004). Data fu-
sion for visual tracking with particles. Proc. of IEEE,
93(3):495–513.
Smeulder, W. M. A., Dung, M. C., Cucchiara, R., Calderara,
S., Deghghan, A., and Shah, M. (2014). Visual track-
ing: an experimental survey. IEEE Trans. on PAMI.
Stalder, S., Grabner, H., and Gool, L. V. (2009). Beyond
semi-supervised tracking: Tracking should be as sim-
ple as detection, but not simpler than recognition. In
ICCV (WS on On-line Comp. Vis.)), pages 1409–1416.
Stenger, B., Woodley, T., and Cipolla, R. (2009). Learning
to track with multiple observers. In Proc. of CVPR.
Triesch, J. and v. d. Malsburg, C. (2001). Democratic in-
tegration: Self-organized integration of adaptive cues.
Neural Computation, 13(9):2049–2074.
CoherentSelectionofIndependentTrackersforReal-timeObjectTracking
591

Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proc. of
CVPR, volume 1.
Yilmaz, A., Li, X., and Shah, M. (2004). Object contour
tracking using level sets. In Proc. of ACCV.
Yin, Z., Porikli, F., and Collins, R. T. (2008). Likelihood
map fusion for visual object tracking. In IEEE Work-
shop on Applications of Computer Vision, pages 1–7.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
592
